Download as pdf or txt
You might also like
- George Street Concept Design Part 1 PDFDocument11 pagesGeorge Street Concept Design Part 1 PDFwitanti nur utamiNo ratings yet
- SORTINGDocument46 pagesSORTINGKhushbu BansalNo ratings yet
- Project ReportDocument4 pagesProject ReportVikas SinghaniaNo ratings yet
- Unilever AssignmentDocument14 pagesUnilever AssignmentZauk33% (6)
- Class 5 Casestudy LucentDocument3 pagesClass 5 Casestudy LucentDoreen WangNo ratings yet
- Tax Invoice: KOLKATA GAS SERVICE (000010196)Document1 pageTax Invoice: KOLKATA GAS SERVICE (000010196)Jitesh SharmaNo ratings yet
- Data Structures and Algorithms: (CS210/ESO207/ESO211)Document35 pagesData Structures and Algorithms: (CS210/ESO207/ESO211)Moazzam HussainNo ratings yet
- Avl T: - Binary Search Trees - AVL TreesDocument26 pagesAvl T: - Binary Search Trees - AVL TreeslathasowmiyahNo ratings yet
- Binary Search Trees-1Document44 pagesBinary Search Trees-1Zuhan MuhammedNo ratings yet
- Data Structures SampleDocument8 pagesData Structures SampleHebrew JohnsonNo ratings yet
- CS 561, Lecture 2: Randomization in Data Structures: Jared Saia University of New MexicoDocument46 pagesCS 561, Lecture 2: Randomization in Data Structures: Jared Saia University of New MexicoΑλέξανδρος ΓεωργίουNo ratings yet
- Test2 SolnDocument6 pagesTest2 Soln2376271No ratings yet
- DSA Assignment 1-SolutionsDocument10 pagesDSA Assignment 1-SolutionsChatianya ChaniyaraNo ratings yet
- hw06 Solution PDFDocument7 pageshw06 Solution PDFsiddharth1kNo ratings yet
- Mca-4 MC0080 IDocument15 pagesMca-4 MC0080 ISriram ChakrapaniNo ratings yet
- Daa Kcs503 2021-22 Aktu Qpaper SolDocument40 pagesDaa Kcs503 2021-22 Aktu Qpaper SolMRIGYA SAHAINo ratings yet
- ECE608 Homework #8 Solution, Fall 2003Document13 pagesECE608 Homework #8 Solution, Fall 2003Mrinal TakNo ratings yet
- Question Bank APDocument4 pagesQuestion Bank APUtkarsh TiwariNo ratings yet
- Minor 1 Solution PDFDocument6 pagesMinor 1 Solution PDFgNo ratings yet
- Lecture 5: Linear Sorting: ReviewDocument5 pagesLecture 5: Linear Sorting: ReviewVan Vy HongNo ratings yet
- ds102 ps6 PDFDocument11 pagesds102 ps6 PDFSumathi KannaNo ratings yet
- Quiz 1 Solutions: Introduction To AlgorithmsDocument12 pagesQuiz 1 Solutions: Introduction To AlgorithmsAijin JiangNo ratings yet
- COL106 Problems PDFDocument10 pagesCOL106 Problems PDFgNo ratings yet
- Binary Search: Successful Case (Element Found in The List)Document20 pagesBinary Search: Successful Case (Element Found in The List)kuchipudi durga pravallikaNo ratings yet
- Sikkim Manipal University: July 2011Document25 pagesSikkim Manipal University: July 2011Pankaj KumarNo ratings yet
- D.Math 7nd ChapterDocument14 pagesD.Math 7nd ChapterSajjad ShamimNo ratings yet
- 20MCA023 Algorithm AssighnmentDocument13 pages20MCA023 Algorithm AssighnmentPratik KakaniNo ratings yet
- 10 Randomized Binary Search Trees: Algorithms Lecture 10: Treaps and Skip Lists (Fa'13)Document12 pages10 Randomized Binary Search Trees: Algorithms Lecture 10: Treaps and Skip Lists (Fa'13)Andrei Costin ConstantinescuNo ratings yet
- Range Searching Using KD TreeDocument12 pagesRange Searching Using KD TreeAly Pasha MohamedNo ratings yet
- Range Searching Using KD TreeDocument12 pagesRange Searching Using KD TreeAly Pasha MohamedNo ratings yet
- MC0080 - Analysis and Design of AlgorithmsDocument11 pagesMC0080 - Analysis and Design of AlgorithmsHarvinder SinghNo ratings yet
- Announcements: Weekly Reading Assignment: Chapter 9 (CLRS) (Not On This Exam)Document17 pagesAnnouncements: Weekly Reading Assignment: Chapter 9 (CLRS) (Not On This Exam)Ibrahim HawariNo ratings yet
- CS2040 Tutorial5 AnsDocument4 pagesCS2040 Tutorial5 Ansjoanna tayNo ratings yet
- Example: Factorial: STR STRDocument16 pagesExample: Factorial: STR STRGerald KapinguraNo ratings yet
- CMSC 420: Lecture 12 Balancing by Rebuilding - Scapegoat TreesDocument5 pagesCMSC 420: Lecture 12 Balancing by Rebuilding - Scapegoat Treesrashed44No ratings yet
- Lecture 12Document4 pagesLecture 12Hemesh SinghNo ratings yet
- Practical Session No. 4 Trees: Trees As Basic Data Structures TreeDocument11 pagesPractical Session No. 4 Trees: Trees As Basic Data Structures Treerajgopal527No ratings yet
- Data Structure - SolutionDocument33 pagesData Structure - Solutionwrdmania15No ratings yet
- Ch11 Soln 2Document8 pagesCh11 Soln 2SMLNo ratings yet
- Computer Science Textbook Solutions - 9Document30 pagesComputer Science Textbook Solutions - 9acc-expertNo ratings yet
- Data Structure IV: Persistent Segment TreesDocument18 pagesData Structure IV: Persistent Segment TreesNhan Nguyen ThanhNo ratings yet
- As Needed For Those Other Classes (So If You Get Lucky and Find A Solution in One ofDocument12 pagesAs Needed For Those Other Classes (So If You Get Lucky and Find A Solution in One ofYogendra MishraNo ratings yet
- hw03 Solution PDFDocument7 pageshw03 Solution PDFsiddharth1k0% (1)
- Ching and Christine - S Final Review SolutionsDocument15 pagesChing and Christine - S Final Review SolutionsJuan ArenasNo ratings yet
- BDA MergedDocument576 pagesBDA Mergedvaibhav pharateNo ratings yet
- Unit IIDocument65 pagesUnit IIMugizhan NagendiranNo ratings yet
- Data Structutes Using C'Document7 pagesData Structutes Using C'Sumitavo NagNo ratings yet
- Cs 97si: Introduction To Programming Contests: Jaehyun ParkDocument39 pagesCs 97si: Introduction To Programming Contests: Jaehyun ParkAditya SinghNo ratings yet
- Lecture 3: Sorting: Set Interface (L03-L08)Document6 pagesLecture 3: Sorting: Set Interface (L03-L08)Van Vy HongNo ratings yet
- Heap Ordered TreesDocument6 pagesHeap Ordered TreesDhivya sureshbabuNo ratings yet
- Ps 5 SolDocument5 pagesPs 5 SolRandom SwagNo ratings yet
- Data Structure QuestionsDocument13 pagesData Structure QuestionsSesa Singha RoyNo ratings yet
- 03 Data StructuresDocument44 pages03 Data StructuresChintu MahadaniNo ratings yet
- Lecture 5Document25 pagesLecture 5satyabashaNo ratings yet
- Assignment 1: TH THDocument2 pagesAssignment 1: TH THAngel AkankshaNo ratings yet
- CPSC Algorithms Cheat SheetDocument6 pagesCPSC Algorithms Cheat SheetRya KarkowskiNo ratings yet
- 1 Counting SortDocument8 pages1 Counting SortLucas NáiadeNo ratings yet
- 2 SolDocument3 pages2 SolAditya MishraNo ratings yet
- Recursion and Induction Recurrence Equations vs. Recursive ProceduresDocument5 pagesRecursion and Induction Recurrence Equations vs. Recursive ProceduresJoel BrownNo ratings yet
- Algorithms Homework HelpDocument22 pagesAlgorithms Homework HelpProgramming Homework HelpNo ratings yet
- NIEIT Ada Lab ManualDocument39 pagesNIEIT Ada Lab ManualMohammed MuzammilNo ratings yet
- Fib HeapsDocument7 pagesFib Heapsapi-3825559100% (1)
- Quiz 6Document2 pagesQuiz 6Mamta YadavNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 7 Sample SolutionDocument2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 7 Sample Solutiondjoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 7 Due: Thursday, Apr. 12Document2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 7 Due: Thursday, Apr. 12djoseph_1No ratings yet
- MIT21M 030S13 Exam1reviewDocument3 pagesMIT21M 030S13 Exam1reviewdjoseph_1No ratings yet
- MIT9 85F12 CR TipsDocument3 pagesMIT9 85F12 CR Tipsdjoseph_1No ratings yet
- Second Exam Review SheetDocument2 pagesSecond Exam Review Sheetdjoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 2 Sample SolutionDocument2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 2 Sample Solutiondjoseph_1No ratings yet
- MIT9 85F12 CR GuidelinesDocument3 pagesMIT9 85F12 CR Guidelinesdjoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 6 Sample SolutionDocument2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 6 Sample Solutiondjoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 5 Due: Thursday, Mar. 22Document2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 5 Due: Thursday, Mar. 22djoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 6 Due: Thursday, Apr. 5Document2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 6 Due: Thursday, Apr. 5djoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 4 Sample SolutionDocument2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 4 Sample Solutiondjoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 3 Sample SolutionDocument2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 3 Sample Solutiondjoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 4 Due: Thursday, Mar. 15Document2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 4 Due: Thursday, Mar. 15djoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 2 Due: Thursday, Mar. 1Document2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 2 Due: Thursday, Mar. 1djoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 3 Due: Thursday, Mar. 8Document2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 3 Due: Thursday, Mar. 8djoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 8 Sample SolutionDocument2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 8 Sample Solutiondjoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 8 Due: Thursday, Apr. 19Document2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 8 Due: Thursday, Apr. 19djoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 10 Due: Thursday, May 3Document2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 10 Due: Thursday, May 3djoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 9 Due: Thursday, Apr. 26Document2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 9 Due: Thursday, Apr. 26djoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 9 Sample SolutionDocument2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 9 Sample Solutiondjoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 10 Sample SolutionDocument2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 10 Sample Solutiondjoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 1 Sample SolutionDocument2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 1 Sample Solutiondjoseph_1No ratings yet
- 6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 1 Due: Thursday, Feb. 23Document2 pages6.851 Advanced Data Structures (Spring'12) Prof. Erik Demaine Problem 1 Due: Thursday, Feb. 23djoseph_1No ratings yet
- Homework 4Document2 pagesHomework 4djoseph_1No ratings yet
- Outline: SamplingDocument43 pagesOutline: Samplingdjoseph_1No ratings yet
- Assignment Summary: Inform Us of Your SubjectDocument6 pagesAssignment Summary: Inform Us of Your Subjectdjoseph_1No ratings yet
- Dissertations. The Paper Should Do The FollowingDocument5 pagesDissertations. The Paper Should Do The Followingdjoseph_1No ratings yet
- Planar X-Ray Imaging: P X, y e Where X, Y, ZDocument13 pagesPlanar X-Ray Imaging: P X, y e Where X, Y, Zdjoseph_1No ratings yet
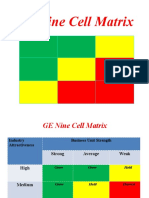
- GE MatrixDocument13 pagesGE Matrixanand guptaNo ratings yet
- Econ PE ProblemBkDocument19 pagesEcon PE ProblemBkpganoelNo ratings yet
- Specifications For DiariesDocument4 pagesSpecifications For DiariesRagni TayalNo ratings yet
- 326 Chapter 9 - Fundamentals of Capital BudgetingDocument20 pages326 Chapter 9 - Fundamentals of Capital BudgetingAbira Bilal HanifNo ratings yet
- After Graduating You Might Decide To Start A Small Business PDFDocument1 pageAfter Graduating You Might Decide To Start A Small Business PDFDoreenNo ratings yet
- How To Start A Travel and Tour BusinessDocument3 pagesHow To Start A Travel and Tour BusinessGrace LeonardoNo ratings yet
- Acca TT London FT ShorttermDocument20 pagesAcca TT London FT ShorttermfakhtaNo ratings yet
- Chipotle 2013 Organizational AnalysisDocument7 pagesChipotle 2013 Organizational Analysistarawneh92No ratings yet
- A Report On Tourism Industry in Pakistan and Its Problems and SolutionsDocument17 pagesA Report On Tourism Industry in Pakistan and Its Problems and SolutionsSanan Khan ZadaNo ratings yet
- ch08 SolDocument18 pagesch08 SolJohn Nigz Payee50% (2)
- EC 502 Switala AndreDocument3 pagesEC 502 Switala AndreTanya SinghNo ratings yet
- Business Buzzwords: Air CoverDocument2 pagesBusiness Buzzwords: Air CoverSazedur RahmanNo ratings yet
- Manmgt3 1 PDFDocument29 pagesManmgt3 1 PDFWilsonNo ratings yet
- MS 04Document3 pagesMS 04Sanjay SanariyaNo ratings yet
- Term Paper For E17B1 MGT511Document3 pagesTerm Paper For E17B1 MGT511saminsbi0% (1)
- ICICI Bank Car Loans Primary DetailsDocument11 pagesICICI Bank Car Loans Primary DetailsAastha PandeyNo ratings yet
- Types of Motor Vehicles at A GlanceDocument3 pagesTypes of Motor Vehicles at A GlancettdostNo ratings yet
- MOF Company Inc Vs Shin YangDocument2 pagesMOF Company Inc Vs Shin YangSachuzenNo ratings yet
- Fischer - Fundamentals of Advanced Accounting 1eDocument27 pagesFischer - Fundamentals of Advanced Accounting 1eyechueNo ratings yet
- Timeshare in IndiaDocument7 pagesTimeshare in IndiaRavi SinghNo ratings yet
- Key Issues in Industry in PakistanDocument13 pagesKey Issues in Industry in PakistanRahim NayaniNo ratings yet
- Definition of TermsDocument8 pagesDefinition of TermsJace EstrellaNo ratings yet
- 03 BJT-Basics PDFDocument13 pages03 BJT-Basics PDFMd ArifNo ratings yet
- Entrepreneur InterviewDocument6 pagesEntrepreneur InterviewShreya VijayNo ratings yet
- ACCA Diploma in Financial Management: OverviewDocument9 pagesACCA Diploma in Financial Management: Overviewmuffaddal52No ratings yet