Download as pdf or txt
You might also like
- Brill Formulation Manual v004Document253 pagesBrill Formulation Manual v004stoisesti71% (7)
- Single Phase Inverter Using ArduinoDocument13 pagesSingle Phase Inverter Using Arduinoankitha0% (1)
- Probability ProblemsDocument5 pagesProbability ProblemsRikkard AmbroseNo ratings yet
- Exp 11 Single Phase Inverter Part IDocument7 pagesExp 11 Single Phase Inverter Part Iusmpowerlab0% (1)
- A DQ Frame Controller For Single Phase Inverters ETDDocument135 pagesA DQ Frame Controller For Single Phase Inverters ETDkripansh0% (1)
- Control of Single Phase To Three Phase AcDocument10 pagesControl of Single Phase To Three Phase Acpriya dharshiniNo ratings yet
- Koyo Elevator Co,.Ltd.: Specification DataDocument4 pagesKoyo Elevator Co,.Ltd.: Specification DataFelipe Raul Chumpitaz GNo ratings yet
- Training VFD Trouble Shooting at Reva Industries Limited.: Service DepartmentDocument31 pagesTraining VFD Trouble Shooting at Reva Industries Limited.: Service DepartmentEhsan GhanbarzadehNo ratings yet
- ADV200 SP: Ac Drive For Solar Water PumpsDocument12 pagesADV200 SP: Ac Drive For Solar Water PumpsSathish J EceNo ratings yet
- TI - Motor Control CompendiumDocument221 pagesTI - Motor Control CompendiumhagdincloobleNo ratings yet
- ServomotorsDocument50 pagesServomotorsFlo FlorinNo ratings yet
- FAQ About Drives Technology: Explanation About The Order No. of The New 1LE1 Generation of Aluminium MotorsDocument14 pagesFAQ About Drives Technology: Explanation About The Order No. of The New 1LE1 Generation of Aluminium MotorsWhite TigerNo ratings yet
- Single Phase InverterDocument6 pagesSingle Phase InverterDevine WriterNo ratings yet
- Single Phase I.M. Understanding LevelDocument3 pagesSingle Phase I.M. Understanding LevelK S Ravi Kumar (MVGR EEE)No ratings yet
- Inspection ReportDocument4 pagesInspection Reportaryo suryandaruNo ratings yet
- Vibration Analysis: How Does It Work?Document18 pagesVibration Analysis: How Does It Work?Rahul Tale100% (1)
- Menzel World CementDocument37 pagesMenzel World Cementputrasejahtra100% (1)
- Regenerative DrivesDocument45 pagesRegenerative Drivestreeoflifeprog100% (1)
- Electrical MachinesDocument50 pagesElectrical MachinesTanvi SuryawanshiNo ratings yet
- TECO MotorsDocument15 pagesTECO MotorsHiran Wittachy100% (1)
- Bang Gia Thiet Bi Dieu Khien LsDocument50 pagesBang Gia Thiet Bi Dieu Khien LsvuNo ratings yet
- General Purpose Slip-Ring Induction Motors: Product CatalogueDocument12 pagesGeneral Purpose Slip-Ring Induction Motors: Product Catalogueرضوان محمد مرعي كامل100% (1)
- Machines II ManualsDocument37 pagesMachines II ManualsAtharv ParanjpeNo ratings yet
- 71951B LeonovaDiamond SpreadDocument8 pages71951B LeonovaDiamond SpreadRajesh BeheraNo ratings yet
- Permanent Magnet Synchronous MotorDocument9 pagesPermanent Magnet Synchronous MotorHAMID SULIAMANNo ratings yet
- Regenerative Elevator DrivesDocument7 pagesRegenerative Elevator DrivesPierre Hoyos AguilarNo ratings yet
- VVVF DrivesDocument16 pagesVVVF DrivesIsradani MjNo ratings yet
- Induction Motor (BEE)Document27 pagesInduction Motor (BEE)Kaushik Patnaik100% (2)
- 1Document1 page1Tú LêNo ratings yet
- Power Systems Protection Course: Al-Balqa Applied UniversityDocument37 pagesPower Systems Protection Course: Al-Balqa Applied UniversityLimuel Espiritu100% (2)
- 3 Phase Induction Motor Speed Control Using PIC PDFDocument18 pages3 Phase Induction Motor Speed Control Using PIC PDFAmmar Al-Kindy100% (2)
- Owner's Manual: Stationary Emergency GeneratorDocument68 pagesOwner's Manual: Stationary Emergency GeneratorJan HendriksNo ratings yet
- Control Circuit Wiring Variador V1000 YaskawaDocument8 pagesControl Circuit Wiring Variador V1000 YaskawaAndrés RamírezNo ratings yet
- Current SensingDocument6 pagesCurrent Sensingboslim1580No ratings yet
- Form - Wound - Repair - Specification Rewinding PDFDocument10 pagesForm - Wound - Repair - Specification Rewinding PDFBenjie CallantaNo ratings yet
- Speed Control of Induction Motors - 2 PDFDocument22 pagesSpeed Control of Induction Motors - 2 PDFZariz ZakianNo ratings yet
- Electro-Thermal Analysis of An Induction MotorDocument5 pagesElectro-Thermal Analysis of An Induction MotorS Bharadwaj Reddy100% (1)
- Kasvar: User ManualDocument31 pagesKasvar: User ManualKen LeeNo ratings yet
- Motor Connections DiagramDocument1 pageMotor Connections DiagramDinhnamsgpNo ratings yet
- Selection of Drives and Control Systems For LiftsDocument4 pagesSelection of Drives and Control Systems For LiftsSaikat ChakrabortyNo ratings yet
- EE1201 Machines and DrivesDocument29 pagesEE1201 Machines and DrivesWan Ismail Ibrahim100% (1)
- Frenic Multi Man enDocument352 pagesFrenic Multi Man ensunhuynhNo ratings yet
- Monarch Validity SettingDocument1 pageMonarch Validity SettingEri Wanto SihombingNo ratings yet
- Rotary Encoder - Wikipedia, The Free EncyclopediaDocument7 pagesRotary Encoder - Wikipedia, The Free EncyclopediaSigid AriewibowoNo ratings yet
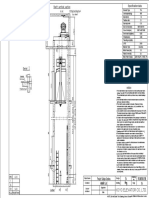
- Oman-1800x2100-Center Opening Auto Door-b+g+m+5-Sheet No - 01 of 05Document5 pagesOman-1800x2100-Center Opening Auto Door-b+g+m+5-Sheet No - 01 of 05Lakhwinder SainiNo ratings yet
- E Entrance at Ground and 1St Floor: Machine Hook Load 2.0 TDocument1 pageE Entrance at Ground and 1St Floor: Machine Hook Load 2.0 THabibulla BavajiNo ratings yet
- EV4 User Manual: Software Versions 1310, 3310, 3350, 3351Document64 pagesEV4 User Manual: Software Versions 1310, 3310, 3350, 3351sanvae123No ratings yet
- Warning Danger: Safety InstructionsDocument142 pagesWarning Danger: Safety InstructionsMario Alberto0% (1)
- Chapter 4 Speed Control of IMDocument49 pagesChapter 4 Speed Control of IMMarco SamehNo ratings yet
- HE 3series Metal Shaft Layout RevDocument1 pageHE 3series Metal Shaft Layout RevJimmy HamadehNo ratings yet
- Schneider Electric - ATV 312 Drive CatalogDocument71 pagesSchneider Electric - ATV 312 Drive CatalogJohn100% (1)
- Iv5 SINCOS Encoder Option 081208 Eng PDFDocument16 pagesIv5 SINCOS Encoder Option 081208 Eng PDFIsmailNo ratings yet
- Content: BL3-B Parallel Quick Commissioning User ManualDocument38 pagesContent: BL3-B Parallel Quick Commissioning User ManualJulio Cesar GonzalezNo ratings yet
- 开关磁阻电机的ANSOFT建模方法Document28 pages开关磁阻电机的ANSOFT建模方法Nuwantha FernandoNo ratings yet
- Lecture 07 - Synchronous MachinesDocument98 pagesLecture 07 - Synchronous Machinesramkiran1989100% (1)
- Practical: - 01: Aim: - Apparatus: - TheoryDocument3 pagesPractical: - 01: Aim: - Apparatus: - TheoryJay MonparaNo ratings yet
- ECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsDocument42 pagesECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsVikas Roy100% (1)
- Speed DC MotorDocument35 pagesSpeed DC MotorDienar Adiose AljahezNo ratings yet
- DC Motors: - Construction Very Similar To A DC GeneratorDocument35 pagesDC Motors: - Construction Very Similar To A DC GeneratorDeepak Ganachari100% (1)
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- DC Motor DrivesDocument53 pagesDC Motor DrivesManoj NNo ratings yet
- Servo MotorDocument16 pagesServo MotorMinh Tuan Tran100% (1)
- 2.15 Simulation+Modeling+模拟建模Document27 pages2.15 Simulation+Modeling+模拟建模James JiangNo ratings yet
- 2.13 Modeling+Cycles:+MA,+AR,+and+ARMA+Models+建模周期:MA,+AR,+和ARMA+模型Document17 pages2.13 Modeling+Cycles:+MA,+AR,+and+ARMA+Models+建模周期:MA,+AR,+和ARMA+模型James JiangNo ratings yet
- U4 Solar System ConceptDocument1 pageU4 Solar System ConceptJames JiangNo ratings yet
- 1.7 What+is+ERM?+什么是企业风险管理Document15 pages1.7 What+is+ERM?+什么是企业风险管理James JiangNo ratings yet
- 1.3 Risk+Taking+A+Corporate+Governance+Perspective+风险承担:公司治理的角度+ (2015考纲本节删除,选修)Document25 pages1.3 Risk+Taking+A+Corporate+Governance+Perspective+风险承担:公司治理的角度+ (2015考纲本节删除,选修)James JiangNo ratings yet
- 2.4 Bayesian+Analysis+贝叶斯分析 PDFDocument17 pages2.4 Bayesian+Analysis+贝叶斯分析 PDFJames JiangNo ratings yet
- LionKing PrimaryPack PDFDocument24 pagesLionKing PrimaryPack PDFYuguang Zhou0% (1)
- 1.4 Risk+Management:+A+Helicopter+View+风险管理:从一个宏观、全局的角度看Document17 pages1.4 Risk+Management:+A+Helicopter+View+风险管理:从一个宏观、全局的角度看James JiangNo ratings yet
- New Chemical Elements: ThresholdDocument2 pagesNew Chemical Elements: ThresholdJames JiangNo ratings yet
- U2 Four Forces ConceptDocument1 pageU2 Four Forces ConceptJames JiangNo ratings yet
- How To Negotiate: VocabularyDocument10 pagesHow To Negotiate: VocabularyJames JiangNo ratings yet
- Stars Light Up: ThresholdDocument2 pagesStars Light Up: ThresholdJames JiangNo ratings yet
- In Their Own Words: Excerpts From Chapter 1 From Lyell, (1830)Document4 pagesIn Their Own Words: Excerpts From Chapter 1 From Lyell, (1830)James JiangNo ratings yet
- ThresholdCard Overview NEW 220812Document2 pagesThresholdCard Overview NEW 220812James JiangNo ratings yet
- Life On Earth: ThresholdDocument2 pagesLife On Earth: ThresholdJames JiangNo ratings yet
- Collective Learning: ThresholdDocument2 pagesCollective Learning: ThresholdJames JiangNo ratings yet
- U5 Beagle Reading 5pages 2012Document5 pagesU5 Beagle Reading 5pages 2012James JiangNo ratings yet
- ThresholdCard 09 NEW 220812Document2 pagesThresholdCard 09 NEW 220812James JiangNo ratings yet
- BD7907FS 6-Channel Combo Driver ICDocument3 pagesBD7907FS 6-Channel Combo Driver ICJános Pál HofferNo ratings yet
- Equilibrium Constant: Gibbs Free Energy and Equilibrium Constant Le Chatelier's PrincipleDocument2 pagesEquilibrium Constant: Gibbs Free Energy and Equilibrium Constant Le Chatelier's Principlerb rbmonteNo ratings yet
- Unit NDocument34 pagesUnit NASHOK SINHA KARANAMNo ratings yet
- Analyzing Netstat OutputDocument7 pagesAnalyzing Netstat Outputpuneetgoyal100No ratings yet
- Trident 2500R: Rental Duty Trailer Load Bank 1500-2500KWDocument8 pagesTrident 2500R: Rental Duty Trailer Load Bank 1500-2500KWAlfonso Alberto ArguelloNo ratings yet
- Consumption Calculation of Vehicles Using OBD DataDocument17 pagesConsumption Calculation of Vehicles Using OBD DataCuleanu_007No ratings yet
- Chapter-5 Steam TurbineDocument26 pagesChapter-5 Steam Turbinehadush gebre100% (1)
- A Novel Plasma Reactor For CVDDocument5 pagesA Novel Plasma Reactor For CVDyerson fabian barragan jimenezNo ratings yet
- BiometricsDocument22 pagesBiometricsJaspreet BarmotaNo ratings yet
- What Caused The Accident at The Sayano - Shushenskaya Hydroelectric Power Plant (SSHPP) : A Seismologist 'S Point of ViewDocument8 pagesWhat Caused The Accident at The Sayano - Shushenskaya Hydroelectric Power Plant (SSHPP) : A Seismologist 'S Point of ViewStefan FleancuNo ratings yet
- SPSS ImplicationsDocument3 pagesSPSS ImplicationsAnonymous MMNqiyxBUNo ratings yet
- USER-700G英文 (2019.5) (OCR)Document37 pagesUSER-700G英文 (2019.5) (OCR)이리재No ratings yet
- Yella Terra Roller Rocker Geometry GuideDocument1 pageYella Terra Roller Rocker Geometry GuideDave BournNo ratings yet
- Student CertificationDocument4 pagesStudent CertificationGegeyz1028No ratings yet
- Https - Myguru - Upsi.edu - My - Documents - 2020 - Courses - MTD3063 - Material - K00814 - 20201005132608 - 03 CSSDocument17 pagesHttps - Myguru - Upsi.edu - My - Documents - 2020 - Courses - MTD3063 - Material - K00814 - 20201005132608 - 03 CSSnurshazihahNo ratings yet
- Cytology and Cytological TechniquesDocument29 pagesCytology and Cytological TechniquesNgotelo FunwiNo ratings yet
- Credit Card Fraud Detection Using Hidden Markov ModelDocument27 pagesCredit Card Fraud Detection Using Hidden Markov ModelfiremanNo ratings yet
- M. Mechanical Works Hydraulic Road Blocker: Guddu Power Station Consturction of Gate HouseDocument1 pageM. Mechanical Works Hydraulic Road Blocker: Guddu Power Station Consturction of Gate HouseZaki AnwerNo ratings yet
- B.Tech III Year II Semester (R13) Supplementary Examinations December 2017 - FH - TSheetDocument36 pagesB.Tech III Year II Semester (R13) Supplementary Examinations December 2017 - FH - TSheetNaga KiranNo ratings yet
- Evaluation of The Implementation of National Curriculum For Secondary School Biology and Academic Achievement in Taraba State, NigeriaDocument8 pagesEvaluation of The Implementation of National Curriculum For Secondary School Biology and Academic Achievement in Taraba State, NigeriaEditor IJTSRDNo ratings yet
- 55DRS 63l-Mek64Document16 pages55DRS 63l-Mek64Aleksey OvchinnikovNo ratings yet
- Paver 7.0 AboutDocument12 pagesPaver 7.0 AboutairpavsetNo ratings yet
- Managing The Database InstanceDocument43 pagesManaging The Database InstanceonmcvNo ratings yet
- Fajar Afrindo, Merryana AdrianiDocument11 pagesFajar Afrindo, Merryana Adrianiwaode azfariNo ratings yet
- Holocol Structure Preoperties PartDocument2 pagesHolocol Structure Preoperties PartInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- How Do I Build A Telescope at Home PDFDocument1 pageHow Do I Build A Telescope at Home PDFjelenjek83No ratings yet
- 1MRK511261-UEN - en Engineering Manual 650 Series 1.2 IECDocument128 pages1MRK511261-UEN - en Engineering Manual 650 Series 1.2 IECsabah nooriNo ratings yet
- GE 3TdatasheetDiscovery750Document48 pagesGE 3TdatasheetDiscovery750Neda NaderiNo ratings yet