Download as pdf or txt
You might also like
- Using Arduino With Matlab and Simulink PDFDocument15 pagesUsing Arduino With Matlab and Simulink PDFPrem KumarNo ratings yet
- SOLUTIONS To Homework Assignment #2Document43 pagesSOLUTIONS To Homework Assignment #2rawoo5No ratings yet
- Foundations of Engineering: An Introduction To The Practice of Engineering: Modeling, Analysis, and MeasurementDocument13 pagesFoundations of Engineering: An Introduction To The Practice of Engineering: Modeling, Analysis, and MeasurementciarmelNo ratings yet
- 2001 55 Temur, Coole PDFDocument11 pages2001 55 Temur, Coole PDFKundanNo ratings yet
- Finite Element Analysis of Electric Machines - The Solver and Its ApplicationDocument43 pagesFinite Element Analysis of Electric Machines - The Solver and Its ApplicationHarshan ArumugamNo ratings yet
- Electric Force & Electric FieldsDocument13 pagesElectric Force & Electric FieldsDesejo SozinandoNo ratings yet
- Deflections Work EnergyDocument28 pagesDeflections Work EnergysidNo ratings yet
- Lecture 12 (AC Power) - OverheadDocument12 pagesLecture 12 (AC Power) - OverheadwerewaroNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument32 pagesDynamics: Vector Mechanics For Engineersعبدالله عمرNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument32 pagesDynamics: Vector Mechanics For EngineersKrishnakumar ThekkepatNo ratings yet
- AC CircuitsDocument86 pagesAC CircuitsdebealNo ratings yet
- HW6 SolDocument17 pagesHW6 SolAnonymous Zz1bV7H59yNo ratings yet
- FEM SlidesDocument31 pagesFEM SlidesAnya CooperNo ratings yet
- Two-Dimensional Heat Transfer: 3/28/2013 ES 312 - Energy Transfer Fundamentals 116Document17 pagesTwo-Dimensional Heat Transfer: 3/28/2013 ES 312 - Energy Transfer Fundamentals 116Muhammad Ishaq KhanNo ratings yet
- Lecture 03Document54 pagesLecture 03Paranivel KannappanNo ratings yet
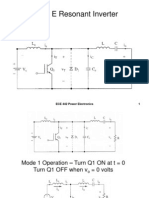
- Class E Resonant InverterDocument28 pagesClass E Resonant InverterSenthil Kumar0% (1)
- 214 Spring 2014 PDFDocument111 pages214 Spring 2014 PDFcombatps1No ratings yet
- Midterm 2 Exam: Y-Parameters of The Amplifier With Feedback in (Ii) - You Must Show Your Work. (3 Points)Document9 pagesMidterm 2 Exam: Y-Parameters of The Amplifier With Feedback in (Ii) - You Must Show Your Work. (3 Points)Shubhresh Kumar JhaNo ratings yet
- EEE 1 Meeting 6 - Phasors, ImpedanceDocument27 pagesEEE 1 Meeting 6 - Phasors, ImpedanceCyril John Caraig NarismaNo ratings yet
- Dynamics: Vector Mechanics For EngineersDocument68 pagesDynamics: Vector Mechanics For EngineersMarceloAbiNo ratings yet
- ECE 307 - Lecture 7 Superposition, Maximum Power Transfer, and Dependent SourcesDocument35 pagesECE 307 - Lecture 7 Superposition, Maximum Power Transfer, and Dependent Sourcesits_crussellNo ratings yet
- Stokes TheoremDocument23 pagesStokes Theoremwebcam178843No ratings yet
- Microelectronic Circuit Design Signals: Jing Ren Faculty of EngineeringDocument43 pagesMicroelectronic Circuit Design Signals: Jing Ren Faculty of EngineeringNishit ParikhNo ratings yet
- Applications of Numerical Methods in Engineering CNS 3320Document27 pagesApplications of Numerical Methods in Engineering CNS 3320secret_marieNo ratings yet
- Artículo 1 - Identification of Control Parameters of The Permanent MagneticDocument8 pagesArtículo 1 - Identification of Control Parameters of The Permanent MagneticANDERSON ADONIS SOSA LOPEZNo ratings yet
- CH 09 Part SolutionDocument10 pagesCH 09 Part SolutionHamid MojiryNo ratings yet
- Ch04 First Order Circuits PDFDocument96 pagesCh04 First Order Circuits PDFMichelle BatadNo ratings yet
- Power Flow AlgorithmDocument17 pagesPower Flow AlgorithmRohit VermaNo ratings yet
- EM1 Chapter 1Document19 pagesEM1 Chapter 1aliNo ratings yet
- Lecture 6 (Linear Motors) - OverheadDocument9 pagesLecture 6 (Linear Motors) - OverheadwerewaroNo ratings yet
- EEE3 Lecture 5 - Exam2 - Sinusoidal Steady-State AnalysisDocument36 pagesEEE3 Lecture 5 - Exam2 - Sinusoidal Steady-State AnalysisAnfy CeninaNo ratings yet
- 9277Document11 pages9277Khalid HameedNo ratings yet
- Electrical Engineering Fall 2013Document46 pagesElectrical Engineering Fall 2013Eng Mohamed HanafyNo ratings yet
- Basic Principles Magnetic Circuits-2p PDFDocument28 pagesBasic Principles Magnetic Circuits-2p PDFgecicihesappNo ratings yet
- Mems TransducersDocument21 pagesMems TransducersDavide MaranoNo ratings yet
- Tutorial 2Document4 pagesTutorial 2Sam StideNo ratings yet
- Vector - Mechanics (Compatibility Mode)Document17 pagesVector - Mechanics (Compatibility Mode)BalvinderNo ratings yet
- Cambio de FrecuenciaDocument20 pagesCambio de FrecuenciaDarness Castillo RodriguezNo ratings yet
- EMFT Challenging ExperimentsDocument15 pagesEMFT Challenging ExperimentsMaile Sachin KumarNo ratings yet
- Lab Manual FEM 19th JanDocument54 pagesLab Manual FEM 19th Janabhishek ranjanNo ratings yet
- Elec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Document11 pagesElec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Joseph NguyenNo ratings yet
- Chapter 7 Sinusoidal Steady-State AnalysisDocument24 pagesChapter 7 Sinusoidal Steady-State AnalysisMohammad DamatyNo ratings yet
- Breakdown in Insulations 2011 Update - QuizDocument23 pagesBreakdown in Insulations 2011 Update - QuizKung ChinHanNo ratings yet
- ps5 Thermal GuideDocument6 pagesps5 Thermal GuideSundaramNo ratings yet
- Bài Tập Số 4 - Tiểu Luận: Trường Đại Học Tôn Đức Thắng Khoa Điện - Điện TửDocument25 pagesBài Tập Số 4 - Tiểu Luận: Trường Đại Học Tôn Đức Thắng Khoa Điện - Điện TửNguyễn Hồng HạnhNo ratings yet
- Least Cost System Operation: Economic Dispatch 2: Smith College, EGR 325 March 10, 2006Document37 pagesLeast Cost System Operation: Economic Dispatch 2: Smith College, EGR 325 March 10, 2006engidawabelNo ratings yet
- An Introduction To Relativistic Quantum Chemistry - Lucas VisscherDocument111 pagesAn Introduction To Relativistic Quantum Chemistry - Lucas Visscherandrew1553No ratings yet
- ET4117 Electrical Machines and Drives Lecture2 PDFDocument36 pagesET4117 Electrical Machines and Drives Lecture2 PDFAnonymous AMjDOJ0lNo ratings yet
- BTEC NC - Further Mathematics For Technicians - Applied CalculusDocument15 pagesBTEC NC - Further Mathematics For Technicians - Applied CalculusBrendan BurrNo ratings yet
- 2023 OPhO TheoryDocument10 pages2023 OPhO TheoryNguyễn Trần Minh TríNo ratings yet
- Formula Sheet Weeks 6-13Document7 pagesFormula Sheet Weeks 6-13Bilal ShahidNo ratings yet
- Dfig Book PDFDocument29 pagesDfig Book PDFSrinivasan PurushothamanNo ratings yet
- Power Systems Lab 3Document7 pagesPower Systems Lab 3GILBERTNo ratings yet
- PN Junctions TheoryDocument43 pagesPN Junctions TheoryMoh AlsultanNo ratings yet
- Chap3-Solid-State Diodes and Diode CircuitsDocument68 pagesChap3-Solid-State Diodes and Diode CircuitsMạnh Cường TrầnNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Electronics 3 Checkbook: The Checkbooks SeriesFrom EverandElectronics 3 Checkbook: The Checkbooks SeriesRating: 5 out of 5 stars5/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Co DesignDocument18 pagesCo DesignPrem KumarNo ratings yet
- Conclusion: InferenceDocument4 pagesConclusion: InferencePrem KumarNo ratings yet
- 4 - Types of DC Chopper PDFDocument38 pages4 - Types of DC Chopper PDFPrem KumarNo ratings yet
- Chapter 4Document50 pagesChapter 4Prem KumarNo ratings yet
- Cognitive Psychology PDFDocument30 pagesCognitive Psychology PDFPrem KumarNo ratings yet
- Speed Control of Brushless DC Motor: Three Phase Voltage Source InverterDocument1 pageSpeed Control of Brushless DC Motor: Three Phase Voltage Source InverterPrem KumarNo ratings yet
- Chapter 2Document41 pagesChapter 2Prem KumarNo ratings yet
- Resonant Frequency Andfrequency Response of A RLC Circuit: X X R ZDocument5 pagesResonant Frequency Andfrequency Response of A RLC Circuit: X X R ZPrem KumarNo ratings yet
- Apparatus Required:-: Frequency Response of Parallel Resonance CircuitDocument3 pagesApparatus Required:-: Frequency Response of Parallel Resonance CircuitPrem KumarNo ratings yet
- CKT Mesh AnalysisDocument3 pagesCKT Mesh AnalysisPrem KumarNo ratings yet
- Name of The Component Range Type Quantity: Aim: Maximum Power TransferDocument3 pagesName of The Component Range Type Quantity: Aim: Maximum Power TransferPrem KumarNo ratings yet
- 2015 Summer Model Answer PaperDocument17 pages2015 Summer Model Answer Paper52. YASHRAJ RANSHURNo ratings yet
- Pdvsa: Manual de Ingenieria de DiseñoDocument34 pagesPdvsa: Manual de Ingenieria de DiseñoJaviel SánchezNo ratings yet
- Principle of EE1: Lesson 3Document88 pagesPrinciple of EE1: Lesson 3Nguyễn Hoàng LânNo ratings yet
- Mousetrap CarDocument32 pagesMousetrap Carapi-91979209No ratings yet
- Voltage Regulator vr6 - 2Document20 pagesVoltage Regulator vr6 - 2Manuel Otero0% (1)
- Graph Problems On KinematicsDocument9 pagesGraph Problems On Kinematicsashutosh_p29100% (3)
- Field Oriented Control of Ac Motor - ReportDocument9 pagesField Oriented Control of Ac Motor - ReportKesri Nath TiwariNo ratings yet
- G8 ScienceDocument11 pagesG8 ScienceTaboom IsolationNo ratings yet
- Mechanics of Solids (CIE 1001) RCSDocument2 pagesMechanics of Solids (CIE 1001) RCSAlok KumarNo ratings yet
- Design and Analysis of Class E/F3 Power Amplifier With Nonlinear Shunt Capacitance at Nonoptimum OperationDocument8 pagesDesign and Analysis of Class E/F3 Power Amplifier With Nonlinear Shunt Capacitance at Nonoptimum OperationSaroja JNo ratings yet
- Forces and Motion Presentation Rubric: 5 Creatively DesignedDocument1 pageForces and Motion Presentation Rubric: 5 Creatively Designedapi-263264137No ratings yet
- Electrogeometric Method (6) : (Examples)Document10 pagesElectrogeometric Method (6) : (Examples)Saravanan KsNo ratings yet
- Chapter 2.7-2.8Document32 pagesChapter 2.7-2.8haloNo ratings yet
- Physics XI STBB MOC 2023Document3 pagesPhysics XI STBB MOC 2023Habib U Zaman MemonNo ratings yet
- Protection and Relay SchemesDocument44 pagesProtection and Relay SchemesSaeed Mahmood Gul Khan67% (6)
- Distance Protection of Series Compensated Transmission LineDocument9 pagesDistance Protection of Series Compensated Transmission Lineyand_carlosNo ratings yet
- Eye Sight SLDocument28 pagesEye Sight SLmardel11No ratings yet
- Linear Induction Motor-Equivalent-Circuit Model: J. Duncan, C.Eng., M.I.E.E., Mem.I.E.E.EDocument7 pagesLinear Induction Motor-Equivalent-Circuit Model: J. Duncan, C.Eng., M.I.E.E., Mem.I.E.E.EShashank SinghNo ratings yet
- 3 Magnetic Effect-Of Current 3Document7 pages3 Magnetic Effect-Of Current 3Sreyasi SarkarNo ratings yet
- Investigatory ProjectDocument18 pagesInvestigatory ProjectSanjana SinghNo ratings yet
- Yuan-Kang Wu Jhih-Hao Lin Huei-Jeng LinDocument13 pagesYuan-Kang Wu Jhih-Hao Lin Huei-Jeng LinrdwchyNo ratings yet
- Dielectrics Under Electric FieldDocument19 pagesDielectrics Under Electric FieldeuchumaNo ratings yet
- AC-to-AC Converter: Categories DC Link Converters Cycloconverters Matrix Converters See Also ReferencesDocument4 pagesAC-to-AC Converter: Categories DC Link Converters Cycloconverters Matrix Converters See Also ReferencesAmos KormeNo ratings yet
- Color TV China TCL Chassis M113 PDFDocument9 pagesColor TV China TCL Chassis M113 PDFRiza Badua0% (1)
- Automatic Rain Detector SynopsisDocument4 pagesAutomatic Rain Detector SynopsisAnkush KhannaNo ratings yet
- Chapter 4 Static Equilibrium: 4.1 The Important StuffDocument13 pagesChapter 4 Static Equilibrium: 4.1 The Important StuffNoppadol EGATNo ratings yet
- Orbits and Escape Velocity NOTESDocument2 pagesOrbits and Escape Velocity NOTESKimberly MutangaNo ratings yet
- Power Quality IDocument157 pagesPower Quality Ipawannhpc100% (2)
- Circuit Breaker: From Wikipedia, The Free EncyclopediaDocument8 pagesCircuit Breaker: From Wikipedia, The Free EncyclopediaAyman ElotaifyNo ratings yet