Download as pdf or txt
You might also like
- A New Nonlinear Guidance Logic For Trajectory Tracking PDFDocument16 pagesA New Nonlinear Guidance Logic For Trajectory Tracking PDFЋирка ФејзбуџаркаNo ratings yet
- Radar Missile Seekers: Chris J. Baker and Anthony ZyweckDocument10 pagesRadar Missile Seekers: Chris J. Baker and Anthony ZyweckrehanNo ratings yet
- Spacecraft Dynamics and Control: The Embedded Model Control ApproachFrom EverandSpacecraft Dynamics and Control: The Embedded Model Control ApproachRating: 5 out of 5 stars5/5 (1)
- fm3 3 1Document245 pagesfm3 3 1Mark Cheney100% (2)
- Implement Three-Dimensional Pursuit Guidance Law With Feedback Linearization Control MethodDocument4 pagesImplement Three-Dimensional Pursuit Guidance Law With Feedback Linearization Control MethodbadsaahNo ratings yet
- Missile Interceptor Guidance and ControlDocument6 pagesMissile Interceptor Guidance and ControlDpt HtegnNo ratings yet
- APL Basic Principles of Homing Guidance PalumboDocument17 pagesAPL Basic Principles of Homing Guidance PalumboÁlvaro Conti FilhoNo ratings yet
- Yousif Al Mashhadany MSC ThesisDocument121 pagesYousif Al Mashhadany MSC Thesisyousif al mashhadanyNo ratings yet
- Missile Guidance Laws: NITHIN KUMAR. V. P, 4NI13ME081, 7 Semester B' SectionDocument12 pagesMissile Guidance Laws: NITHIN KUMAR. V. P, 4NI13ME081, 7 Semester B' SectionNithin GowdaNo ratings yet
- Three-Dimensional Missile Guidance Laws Design Using Fuzzy SchemesDocument8 pagesThree-Dimensional Missile Guidance Laws Design Using Fuzzy Schemesاحمد عليNo ratings yet
- Attitude and Gyro Bias Estimation For A Flying UAV: Najib Metni Jean-Michel P Imlin Tarek Hamel Philippe Sou'eresDocument7 pagesAttitude and Gyro Bias Estimation For A Flying UAV: Najib Metni Jean-Michel P Imlin Tarek Hamel Philippe Sou'eresJoseph WoodruffNo ratings yet
- MissileDocument14 pagesMissileTasmia Tamanna100% (1)
- Paper Acacio MoralesDocument7 pagesPaper Acacio MoralesAcacio Alejandro Morales HenriquezNo ratings yet
- Heba ElKholy Thesis S2014Document13 pagesHeba ElKholy Thesis S2014AlexandraAndreeaNo ratings yet
- LOS Rate Estimation Techniques For Proportional Navigation Guided MissilesDocument6 pagesLOS Rate Estimation Techniques For Proportional Navigation Guided MissilesDpt HtegnNo ratings yet
- A New Guidance Law For A Tactical Surface-To-Surface MissileDocument24 pagesA New Guidance Law For A Tactical Surface-To-Surface MissilecongcongNo ratings yet
- Guidance Laws For Planar Motion Control: Morten Breivik and Thor I. FossenDocument8 pagesGuidance Laws For Planar Motion Control: Morten Breivik and Thor I. Fossenkothapalli21No ratings yet
- GMM 1 and C CHAPTER 9 Ballistics, Fire Control, and AlignmentDocument44 pagesGMM 1 and C CHAPTER 9 Ballistics, Fire Control, and AlignmentDr. RAMPRASADH.CNo ratings yet
- Chapter 15 Guidance and ControlDocument20 pagesChapter 15 Guidance and ControlpriyadarshinimpNo ratings yet
- Module 1 & 2 (Tracking Radar) PDFDocument52 pagesModule 1 & 2 (Tracking Radar) PDFDeeksha NaiduNo ratings yet
- When Bad Things Happen To Good MissilesDocument9 pagesWhen Bad Things Happen To Good Missilesmykingboody2156No ratings yet
- Bank-to-Turn Control For A Small UAV Using Backstepping and Parameter AdaptationDocument6 pagesBank-to-Turn Control For A Small UAV Using Backstepping and Parameter AdaptationTiger ZhangNo ratings yet
- Palumbo Principles Rev2018Document17 pagesPalumbo Principles Rev2018raa2010No ratings yet
- 51885.kopriva JSPT 99Document17 pages51885.kopriva JSPT 99eyob233No ratings yet
- (2010) Palumbo - Basic - Missile Homing Guidance - Principles PDFDocument17 pages(2010) Palumbo - Basic - Missile Homing Guidance - Principles PDFAlex YangNo ratings yet
- Kosarnovsky 2019Document6 pagesKosarnovsky 2019Lady Katherine Gomez SamboniNo ratings yet
- Approximation-Based Control of Uncertain Helicopter DynamicsDocument16 pagesApproximation-Based Control of Uncertain Helicopter DynamicsmeropeatlaNo ratings yet
- Missile Guidance LawsDocument10 pagesMissile Guidance LawsAkanksha221291No ratings yet
- IRJET Modeling and Analysis of Inter Cop-68914792Document5 pagesIRJET Modeling and Analysis of Inter Cop-68914792Dpt HtegnNo ratings yet
- Adaptive Optimal Path Following For High Wind FlightsDocument6 pagesAdaptive Optimal Path Following For High Wind FlightsirqoviNo ratings yet
- Line-of-Sight Guidance For Path Following of Marine VehiclesDocument29 pagesLine-of-Sight Guidance For Path Following of Marine Vehiclesartist-bossNo ratings yet
- Three-Dimensional Midcourse Guidance Using Neural Networks For Interception of Ballistic TargetsDocument11 pagesThree-Dimensional Midcourse Guidance Using Neural Networks For Interception of Ballistic TargetsGiri PrasadNo ratings yet
- Twin Rotor Observer ImplementationDocument7 pagesTwin Rotor Observer Implementationtidjani86No ratings yet
- Vision-Based Autonomous Approach and Landing For ADocument9 pagesVision-Based Autonomous Approach and Landing For AWei Jiang NgNo ratings yet
- InTech-Robust Path Following For Uav Using Pure Pursuit GuidanceDocument21 pagesInTech-Robust Path Following For Uav Using Pure Pursuit GuidanceedwardsilvaNo ratings yet
- Combined Path-Following and Obstacle Avoidance Control of A WheeledRobotDocument15 pagesCombined Path-Following and Obstacle Avoidance Control of A WheeledRobotltve20ee142No ratings yet
- A Heuristic Predictive LOS Guidance Law Based On Trajectory Learning, Ant Colony Optimization and Tabu SearchDocument7 pagesA Heuristic Predictive LOS Guidance Law Based On Trajectory Learning, Ant Colony Optimization and Tabu Searchاحمد عليNo ratings yet
- Nonlinear Robust Tracking Control of A Quadrotor Uav On: Taeyoung Lee, Melvin Leok, and N. Harris McclamrochDocument10 pagesNonlinear Robust Tracking Control of A Quadrotor Uav On: Taeyoung Lee, Melvin Leok, and N. Harris McclamrochCristianSouzaNo ratings yet
- Nonlinear Control of Motion Synchronization For Satellite Proximity OperationsDocument11 pagesNonlinear Control of Motion Synchronization For Satellite Proximity OperationsKanu GovilaNo ratings yet
- Tabu Fuzzy Guidance - 540Document5 pagesTabu Fuzzy Guidance - 540Ubiquitous Computing and Communication JournalNo ratings yet
- Helicopter Dynamic Stability-1Document7 pagesHelicopter Dynamic Stability-1KaradiasNo ratings yet
- 10 5923 J Aerospace 20130203 02Document21 pages10 5923 J Aerospace 20130203 02Nebiyu TenayeNo ratings yet
- Kamel 2019Document12 pagesKamel 2019Edmund Luke Benedict SimpsonNo ratings yet
- Control of Wheeled Mobile Robots: An Experimental OverviewDocument46 pagesControl of Wheeled Mobile Robots: An Experimental OverviewHassaan AhmedNo ratings yet
- Modeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID ControllerDocument6 pagesModeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID ControllerRonald CaravacaNo ratings yet
- Development of AHRS (Attitude and Heading Reference System) For Autonomous UAV (Unmanned Aerial Vehicle)Document4 pagesDevelopment of AHRS (Attitude and Heading Reference System) For Autonomous UAV (Unmanned Aerial Vehicle)khidirtayNo ratings yet
- Missile Guidance Law Design Via Backstepping Technique: Hamza Zaidi, Panlong Wu, Ali BellahceneDocument6 pagesMissile Guidance Law Design Via Backstepping Technique: Hamza Zaidi, Panlong Wu, Ali BellahceneerpublicationNo ratings yet
- Unicycle Robot Controller OverviewDocument46 pagesUnicycle Robot Controller OverviewThuan NguyenNo ratings yet
- A New Look at Classical Versus Modern Homing Missile Guidance-PrintedDocument13 pagesA New Look at Classical Versus Modern Homing Missile Guidance-Printedmykingboody2156No ratings yet
- Proportional Navigation Guidance (Cite:john H Blakelock)Document7 pagesProportional Navigation Guidance (Cite:john H Blakelock)D.ViswanathNo ratings yet
- Guidance Law Evaluation For Missile Guidance Systems: Chih-Min Lin, Chun-Fei Hsu, Shing-Kuo Chang and Rong-Jong WaiDocument8 pagesGuidance Law Evaluation For Missile Guidance Systems: Chih-Min Lin, Chun-Fei Hsu, Shing-Kuo Chang and Rong-Jong WaiyosefNo ratings yet
- Zhang 2015Document5 pagesZhang 2015bhavyarkrishnan2000No ratings yet
- Proportional Navigation Guidance SystemDocument17 pagesProportional Navigation Guidance SystemD.Viswanath67% (3)
- The International Journal of Robotics Research-2007-Lapierre-361-75Document15 pagesThe International Journal of Robotics Research-2007-Lapierre-361-75Jesse MorrisNo ratings yet
- Vol8 Iss2 113-127 Intelligent Pitch Controller IdentiDocument15 pagesVol8 Iss2 113-127 Intelligent Pitch Controller Identis-rahma.abdullahNo ratings yet
- Applied Sciences: Target Tracking Based On A Nonsingular Fast Terminal Sliding Mode Guidance Law by Fixed-Wing UAVDocument18 pagesApplied Sciences: Target Tracking Based On A Nonsingular Fast Terminal Sliding Mode Guidance Law by Fixed-Wing UAVTgNo ratings yet
- INS/GPS Based State Estimation of Micro Air Vehicles Using Inertial SensorsDocument13 pagesINS/GPS Based State Estimation of Micro Air Vehicles Using Inertial SensorsiisteNo ratings yet
- Tracking Control For Quad-Rotor Using Velocity Fie PDFDocument18 pagesTracking Control For Quad-Rotor Using Velocity Fie PDFw_23No ratings yet
- Missile Guidance PDFDocument22 pagesMissile Guidance PDFjamesyblee50% (2)
- A Comparative Assessment of Flutter Prediction TechniquesDocument34 pagesA Comparative Assessment of Flutter Prediction TechniquesTheNo ratings yet
- Optical Flow: Exploring Dynamic Visual Patterns in Computer VisionFrom EverandOptical Flow: Exploring Dynamic Visual Patterns in Computer VisionNo ratings yet
- Annex (C) Technical Specifications For Overhead Line ConductorsDocument15 pagesAnnex (C) Technical Specifications For Overhead Line ConductorsshahpinkalNo ratings yet
- High Altitude Warfare-The Kargil Conflict and FutureDocument104 pagesHigh Altitude Warfare-The Kargil Conflict and FutureshahpinkalNo ratings yet
- Viking Twin Otter 400s Technical Specifications - FinalDocument13 pagesViking Twin Otter 400s Technical Specifications - FinalshahpinkalNo ratings yet
- Home Loan Interest Deduction Under Section 24 of Income TaxDocument6 pagesHome Loan Interest Deduction Under Section 24 of Income TaxshahpinkalNo ratings yet
- Tibet Leadership in Exile and The Indo-Pacific Strategy: By: Ellen BorkDocument8 pagesTibet Leadership in Exile and The Indo-Pacific Strategy: By: Ellen BorkshahpinkalNo ratings yet
- Substation Overhead (Tacsr) Conductor GTPDocument4 pagesSubstation Overhead (Tacsr) Conductor GTPshahpinkalNo ratings yet
- Iaf'S Growth On Indigenisation?Document74 pagesIaf'S Growth On Indigenisation?shahpinkalNo ratings yet
- Improving Submarine Array IntegrationDocument8 pagesImproving Submarine Array IntegrationshahpinkalNo ratings yet
- Effectiveness of The Signs - Psychologically AstrologyDocument5 pagesEffectiveness of The Signs - Psychologically AstrologyshahpinkalNo ratings yet
- Defination of Graha From The Suryasiddhant - Psychologically AstrologyDocument3 pagesDefination of Graha From The Suryasiddhant - Psychologically AstrologyshahpinkalNo ratings yet
- Optimal Power Flow Analysis: Identify and Resolve Abnormal Conditions On A Transmission SystemDocument2 pagesOptimal Power Flow Analysis: Identify and Resolve Abnormal Conditions On A Transmission SystemshahpinkalNo ratings yet
- Advisory For Passengers Travelling To Yellow Fever Endemic CountriesDocument1 pageAdvisory For Passengers Travelling To Yellow Fever Endemic CountriesshahpinkalNo ratings yet
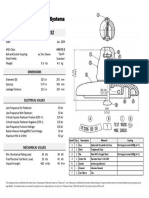
- Maclean Power Systems: DimensionsDocument1 pageMaclean Power Systems: DimensionsshahpinkalNo ratings yet
- ISRO Annualreport2018-19 PDFDocument140 pagesISRO Annualreport2018-19 PDFshahpinkalNo ratings yet
- Fixed Mounted Circuit Breaker Switchgear - SiemensDocument2 pagesFixed Mounted Circuit Breaker Switchgear - SiemensshahpinkalNo ratings yet
- RBI List On NBFCDocument12 pagesRBI List On NBFCshahpinkalNo ratings yet
- Indra Ltr-25 Radar en 02 2019Document2 pagesIndra Ltr-25 Radar en 02 2019shahpinkalNo ratings yet
- 240 Max DemandDocument3 pages240 Max DemandshahpinkalNo ratings yet
- WBSEDCL - Specification of Insulator As FebruaryDocument15 pagesWBSEDCL - Specification of Insulator As FebruaryshahpinkalNo ratings yet
- Chapter - 11 Historical Geography of India - China BordersDocument51 pagesChapter - 11 Historical Geography of India - China BordersshahpinkalNo ratings yet
- 2.IFB Construction Works CLSG RE ApprovedDocument2 pages2.IFB Construction Works CLSG RE ApprovedshahpinkalNo ratings yet
- National Accreditation Board For Testing and Calibration Laboratories (NABL)Document12 pagesNational Accreditation Board For Testing and Calibration Laboratories (NABL)shahpinkalNo ratings yet
- Nabl 152Document12 pagesNabl 152shahpinkalNo ratings yet
- Lucy Switchgear LV Indoor Fuse Distribution Board PDFDocument1 pageLucy Switchgear LV Indoor Fuse Distribution Board PDFshahpinkalNo ratings yet
- Laser Guided MissileDocument10 pagesLaser Guided Missileashutosh1011No ratings yet
- Cruise Missiles in The Middle EastDocument35 pagesCruise Missiles in The Middle EastAL-Zarqawi MJNo ratings yet
- How Does DGPS (Differential GPS) Work - RACELOGIC Support CentreDocument10 pagesHow Does DGPS (Differential GPS) Work - RACELOGIC Support CentreMAHESH CHANDNo ratings yet
- How GPS WorksDocument42 pagesHow GPS Workskasra_tm89% (9)
- Electronic Warfare TutorialDocument32 pagesElectronic Warfare TutorialAbdunnoer KaldineNo ratings yet
- Vendors For GPS Survey Equipments in India PDFDocument3 pagesVendors For GPS Survey Equipments in India PDFAnubhav SrivastavaNo ratings yet
- GMM 3 and 2 Rating ManualDocument175 pagesGMM 3 and 2 Rating Manualallena0403100% (1)
- Hardware in The Loop Simulation For Missile Guidance&Control SystemsDocument15 pagesHardware in The Loop Simulation For Missile Guidance&Control SystemsAlex YangNo ratings yet
- 141 - 4 (2) Astral PoolDocument18 pages141 - 4 (2) Astral PoolAndrésNo ratings yet
- Sarkar Presentation 01Document84 pagesSarkar Presentation 01Achintya SarkarNo ratings yet
- SMS Guided Missiles, Aerodynamics and Flight PrinciplesDocument24 pagesSMS Guided Missiles, Aerodynamics and Flight PrinciplesJunior TribbianiNo ratings yet
- Lecture 7Document12 pagesLecture 7artist-bossNo ratings yet
- Dgps Survey For BWDBDocument34 pagesDgps Survey For BWDBShafiqul HasanNo ratings yet
- Design and Manufacturing Process For A Ballistic MDocument7 pagesDesign and Manufacturing Process For A Ballistic Mjitendra25252No ratings yet
- The Naval Airship and The Revolution at SeaDocument147 pagesThe Naval Airship and The Revolution at Seajwpaprk1No ratings yet
- Reference Coordinate Systems For Missile MotionDocument8 pagesReference Coordinate Systems For Missile MotionD.Viswanath100% (1)
- Bolt Action Cold War - Core RulesDocument50 pagesBolt Action Cold War - Core Rulesworld ruler supremeNo ratings yet
- Classification of MissileDocument3 pagesClassification of Missileraka_skumarNo ratings yet
- Presentación Sistema FLINTDocument37 pagesPresentación Sistema FLINTGithani100% (1)
- 67 Ece2 21015002818Document32 pages67 Ece2 21015002818Sarthak GahlawatNo ratings yet
- Penjelasan GPS NMEA 0183Document4 pagesPenjelasan GPS NMEA 0183M Ilham ArrizeqoNo ratings yet
- CARNETDocument7 pagesCARNETDamacus GheorgheNo ratings yet
- GPS Navigator GP-50 MARK-2Document90 pagesGPS Navigator GP-50 MARK-2Mario Javier GonzalesNo ratings yet
- Advanced Topics: (Iii) Global Positioning System (GPS)Document20 pagesAdvanced Topics: (Iii) Global Positioning System (GPS)RamanarayanSankritiNo ratings yet
- Guided Missiles - DRDODocument90 pagesGuided Missiles - DRDODevanand T Santha0% (1)
- Classification of MissileDocument4 pagesClassification of MissileMoaz Hussain100% (1)
- Rocket and Missiles Lecture NotesDocument18 pagesRocket and Missiles Lecture Notes8D Audio TuneNo ratings yet
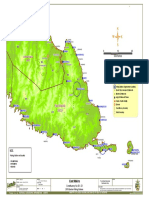
- East Makira Constituency A3Document1 pageEast Makira Constituency A3Andrew EllisonNo ratings yet