Download as doc, pdf, or txt
You might also like
- Elec3505 Formula SheetDocument10 pagesElec3505 Formula Sheetkavita4123No ratings yet
- TCP VS UdpDocument5 pagesTCP VS UdpLavanya_123No ratings yet
- Samsung HT E453 PDFDocument61 pagesSamsung HT E453 PDFboroda241086% (7)
- EEE461Lect11 (Matched Filters)Document19 pagesEEE461Lect11 (Matched Filters)Jamal MesidorNo ratings yet
- C4 Isi 2013 PDFDocument32 pagesC4 Isi 2013 PDFAnh Bien NguyenNo ratings yet
- Kochar Inderkumar Asst. Professor MPSTME, MumbaiDocument66 pagesKochar Inderkumar Asst. Professor MPSTME, MumbaiKochar InderkumarNo ratings yet
- Noise in Communication SystemsDocument21 pagesNoise in Communication Systemsulfar uulNo ratings yet
- Ftir IntroDocument16 pagesFtir IntroNaween AnandNo ratings yet
- Matched FilterDocument30 pagesMatched FilterLavanya GangadharanNo ratings yet
- Signals, Antenna and MeasurementsDocument19 pagesSignals, Antenna and MeasurementsvarunmrNo ratings yet
- 1-Sampling and ReconstructionDocument27 pages1-Sampling and ReconstructionQuyen TranNo ratings yet
- Sampling and ReconstructionDocument40 pagesSampling and ReconstructionHuynh BachNo ratings yet
- Digital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisDocument23 pagesDigital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisSyed Raheel AdeelNo ratings yet
- ECE 414 Tutorial 1: Review: Random Process Fourier Transform OuetasoDocument16 pagesECE 414 Tutorial 1: Review: Random Process Fourier Transform OuetasosaiknaramNo ratings yet
- B4 Detetcion KadambeDocument106 pagesB4 Detetcion Kadambekenjo138No ratings yet
- Ch7 FourierTransform Continuous-Time Signal AnalysisDocument43 pagesCh7 FourierTransform Continuous-Time Signal AnalysisNat RajNo ratings yet
- Lecture7 Ee689 Eq Intro TxeqDocument27 pagesLecture7 Ee689 Eq Intro TxeqdogudoguNo ratings yet
- Bandpass SignallingDocument16 pagesBandpass SignallingNitin SahuNo ratings yet
- Beam FormingDocument42 pagesBeam FormingDuval FortesNo ratings yet
- Elec3505 Formula SheetDocument10 pagesElec3505 Formula SheetDorothy FigueroaNo ratings yet
- Chap7-IIR Filter DesignDocument114 pagesChap7-IIR Filter DesignHANSANo ratings yet
- Sampling TheoremDocument34 pagesSampling Theoremgaurav_juneja_4No ratings yet
- Spectral Measurements: Case A: Bandwidth Exceeds That ofDocument19 pagesSpectral Measurements: Case A: Bandwidth Exceeds That ofnavin_naniNo ratings yet
- Frequency ResponseDocument9 pagesFrequency ResponseAnanda RamanNo ratings yet
- Effect of Noise On Analog Communication SystemsDocument106 pagesEffect of Noise On Analog Communication SystemsAenudin Haroqi50% (2)
- Fourier Analysis of Signals and SystemsDocument24 pagesFourier Analysis of Signals and SystemsBabul IslamNo ratings yet
- Baseband Pulse TransmissionDocument39 pagesBaseband Pulse TransmissionBalaram MullapudiNo ratings yet
- BOREE PresentationDocument91 pagesBOREE PresentationSfq QfsNo ratings yet
- Lesson17 2Document34 pagesLesson17 2api-277477207No ratings yet
- Digital Signal Processing SlidesDocument184 pagesDigital Signal Processing SlidesChinmay Anand100% (1)
- Introduction To Radiowave Propagation: DR Costas ConstantinouDocument55 pagesIntroduction To Radiowave Propagation: DR Costas ConstantinouRenato MangilaNo ratings yet
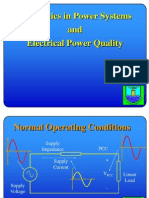
- Harmonics in Power Systems and Electrical Power Quality: Abcdefghij KLDocument57 pagesHarmonics in Power Systems and Electrical Power Quality: Abcdefghij KLFatih GürdalNo ratings yet
- S-72.245 Transmission Methods in Telecommunication Systems (4 CR)Document22 pagesS-72.245 Transmission Methods in Telecommunication Systems (4 CR)Jnan RanjanNo ratings yet
- 3 Low-Pass Signal Filtering: 3.1 Frequency Response of LTI SystemsDocument5 pages3 Low-Pass Signal Filtering: 3.1 Frequency Response of LTI SystemsYassine DjillaliNo ratings yet
- 1 Basics DSP AV IntroDocument36 pages1 Basics DSP AV IntroUbaid UmarNo ratings yet
- Speed Control of DC MotorDocument35 pagesSpeed Control of DC MotorYuvraj GogoiNo ratings yet
- Lecture 6 BDocument22 pagesLecture 6 Bhamed_hashim2001No ratings yet
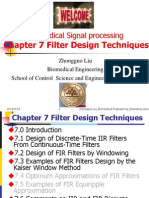
- Chapter 7 Filter Design TechniquesDocument152 pagesChapter 7 Filter Design TechniquesluckyamruNo ratings yet
- Digital Filter Design: Frequency Sampling Method: رچڪيل 22 ناک 26 Lectures 22-26Document25 pagesDigital Filter Design: Frequency Sampling Method: رچڪيل 22 ناک 26 Lectures 22-26Sreenath ReddyNo ratings yet
- Image Restoration (Sections 5.1, 5.5, 5.7, 5.9) : CS474/674 - Prof. BebisDocument67 pagesImage Restoration (Sections 5.1, 5.5, 5.7, 5.9) : CS474/674 - Prof. Bebissrc010850% (2)
- DSP-1 (Intro) (S)Document77 pagesDSP-1 (Intro) (S)karthik0433No ratings yet
- Z-Transform: - Using Fourier Transform For LTI System Analysis IsDocument36 pagesZ-Transform: - Using Fourier Transform For LTI System Analysis IsMarcelo Luis Ruiz RodriguezNo ratings yet
- PTSPQNAUNITVIIIDocument13 pagesPTSPQNAUNITVIIIsrinivasNo ratings yet
- Noise in ModulationDocument64 pagesNoise in ModulationDebojyoti KarmakarNo ratings yet
- תקשורת ספרתית- הרצאה 6 - מסננת מתואמת, איפנון בסיסDocument40 pagesתקשורת ספרתית- הרצאה 6 - מסננת מתואמת, איפנון בסיסRonNo ratings yet
- Lecture # 4: Communication SystemsDocument17 pagesLecture # 4: Communication SystemsKhalid MajeedNo ratings yet
- Review of Signals and SystemsDocument25 pagesReview of Signals and SystemsAdrian TanNo ratings yet
- Digital Filtering in Seismic Data Processing inDocument7 pagesDigital Filtering in Seismic Data Processing inTriswan MardaniNo ratings yet
- ADSPT Lab5Document4 pagesADSPT Lab5Rupesh SushirNo ratings yet
- Emcs - 607P 11-07-2014Document68 pagesEmcs - 607P 11-07-2014abdulbari.abNo ratings yet
- Communication Solved ProblemsDocument145 pagesCommunication Solved ProblemsAngel Linton50% (4)
- The Handbook of Formulas and Tables For Signal ProcessingDocument8 pagesThe Handbook of Formulas and Tables For Signal ProcessingPrakash BachaniNo ratings yet
- Introduction To Equalization: Guy Wolf Roy Ron Guy ShwartzDocument50 pagesIntroduction To Equalization: Guy Wolf Roy Ron Guy ShwartzShilpi RaiNo ratings yet
- Sampling ProcessDocument24 pagesSampling ProcessMuhammad Salah ElgaboNo ratings yet
- Lecture 9-10 - Frequency Response MethodsDocument68 pagesLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- Combinatorial Algorithms: For Computers and CalculatorsFrom EverandCombinatorial Algorithms: For Computers and CalculatorsRating: 4 out of 5 stars4/5 (2)
- 110 Semiconductor Projects for the Home ConstructorFrom Everand110 Semiconductor Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Instruments and MeasurementsFrom EverandInstruments and MeasurementsBirger QvarnstromNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Key Management Other Public Key Cryptosystems: - The Golden Bough, Sir James George FrazerDocument29 pagesKey Management Other Public Key Cryptosystems: - The Golden Bough, Sir James George FrazerLavanya_123No ratings yet
- B.Tech Program Survey Form: - Select - Select - Select - Dd-Mm-YyyyDocument2 pagesB.Tech Program Survey Form: - Select - Select - Select - Dd-Mm-YyyyLavanya_123No ratings yet
- 8-10 Physical ScienceDocument177 pages8-10 Physical ScienceLavanya_123No ratings yet
- Price Comparison For Big Data Appliance and Hadoop (The Data Warehouse Insider)Document12 pagesPrice Comparison For Big Data Appliance and Hadoop (The Data Warehouse Insider)Lavanya_123No ratings yet
- Responses From Server To Client Which Will Have The Following FormatDocument2 pagesResponses From Server To Client Which Will Have The Following FormatLavanya_123No ratings yet
- Cocomo Model1Document12 pagesCocomo Model1Lavanya_123100% (1)
- Week-6 Algorithm: (OOP Through C++ Lab) Write A C++ Program To Sort An Array of Integer NumbersDocument2 pagesWeek-6 Algorithm: (OOP Through C++ Lab) Write A C++ Program To Sort An Array of Integer NumbersLavanya_123100% (1)
- 6802Document2 pages6802Lavanya_123No ratings yet
- Zeitgeist2k17 - IoT and Game DesignDocument3 pagesZeitgeist2k17 - IoT and Game DesignLavanya_123No ratings yet
- Write A C++ Program Illustrating Function Overloading: Week-7 AlgorithmDocument2 pagesWrite A C++ Program Illustrating Function Overloading: Week-7 AlgorithmLavanya_123No ratings yet
- T. Harish Kumar HQ: VizagDocument2 pagesT. Harish Kumar HQ: VizagLavanya_123No ratings yet
- CP Assignment 4,5,6 QuestionsDocument2 pagesCP Assignment 4,5,6 QuestionsLavanya_123No ratings yet
- Week 15Document1 pageWeek 15Lavanya_123No ratings yet
- Academic Year: 2014 - 2015 Subject: Multimedia & Application Development Sem:2 Faculty: G.Sankara RaoDocument2 pagesAcademic Year: 2014 - 2015 Subject: Multimedia & Application Development Sem:2 Faculty: G.Sankara RaoLavanya_123No ratings yet
- Simulating Multiple Constructor FunctionsDocument4 pagesSimulating Multiple Constructor FunctionsLavanya_123No ratings yet
- To-Let: (Two BHK, S-10, Block A) Ramalaxmi ApartmentsDocument2 pagesTo-Let: (Two BHK, S-10, Block A) Ramalaxmi ApartmentsLavanya_123No ratings yet
- ZF Idrift: Marine Propulsion SystemsDocument3 pagesZF Idrift: Marine Propulsion SystemsAlbertoNo ratings yet
- HW Problems Chapter-1Document3 pagesHW Problems Chapter-1William DoveNo ratings yet
- Classified: Your Local MarketplaceDocument4 pagesClassified: Your Local MarketplaceDigital MediaNo ratings yet
- Maven + JSF + RichFaces + JDBC + JXL API For Excel Export (Using Maven Project in Eclipse IDE)Document16 pagesMaven + JSF + RichFaces + JDBC + JXL API For Excel Export (Using Maven Project in Eclipse IDE)nikhilbhalwankar1883No ratings yet
- Operation Guide MSBDocument8 pagesOperation Guide MSBMao RathanithNo ratings yet
- 2205GB Complete PitDocument2 pages2205GB Complete Pitvikas_ojha54706No ratings yet
- Preliminaries For Data Analysis: Problem StatementsDocument4 pagesPreliminaries For Data Analysis: Problem StatementsAnakha PrasadNo ratings yet
- Iso 9001Document91 pagesIso 9001Nishit Rupapara100% (1)
- ELMS Task Weeks 12 13 Dancing Oobleck A Non Newtonian Fluid ExperimentationDocument3 pagesELMS Task Weeks 12 13 Dancing Oobleck A Non Newtonian Fluid ExperimentationLead CanadaNo ratings yet
- List of Questions To Ask Your ISO 9001 Consultant ENDocument2 pagesList of Questions To Ask Your ISO 9001 Consultant ENchahiNo ratings yet
- Work Breakdown Structure For The Proposed One-Storey ResidenceDocument2 pagesWork Breakdown Structure For The Proposed One-Storey ResidenceRania Mae BalmesNo ratings yet
- Adendo Catalogo Easytech IngDocument15 pagesAdendo Catalogo Easytech IngTim SmytheNo ratings yet
- Affix - Arp SpoofingDocument5 pagesAffix - Arp SpoofingTara Jenkins100% (1)
- VTU Multimedia Communications June.2010 Question PaperDocument2 pagesVTU Multimedia Communications June.2010 Question PaperSastry Ramachandrula50% (2)
- Hydraulic Power UnitDocument2 pagesHydraulic Power UnitJosh SabimanNo ratings yet
- DM45DM50Document456 pagesDM45DM50Barreno DrillingNo ratings yet
- SLC 500Document2 pagesSLC 500Rodney PimentaNo ratings yet
- Introduction To R3-SAP R3 ABAP4 TrainingDocument33 pagesIntroduction To R3-SAP R3 ABAP4 Trainingscorpion.0411No ratings yet
- Centrum &magnum C-3000Document12 pagesCentrum &magnum C-3000ศูนย์เครื่องจักรบางบอนโดยวงศ์ธนาวุฒิNo ratings yet
- 8085 Microprocessor Architecture and Programming-1Document92 pages8085 Microprocessor Architecture and Programming-1ShubhamNo ratings yet
- Declaration of Independence PathfinderDocument2 pagesDeclaration of Independence PathfinderginaportfolioNo ratings yet
- PVsyst Simulation ReportDocument7 pagesPVsyst Simulation ReportRandu Satria PutraNo ratings yet
- Jina Kim, Benjamin Grisso, Jeong Kim, Dong Ha, and Daniel InmanDocument13 pagesJina Kim, Benjamin Grisso, Jeong Kim, Dong Ha, and Daniel InmanLucasNo ratings yet
- ForgingDocument2 pagesForgingvelavansuNo ratings yet
- Air Conditioning Completion ExamDocument1 pageAir Conditioning Completion ExamEngineer ZephyrusNo ratings yet
- OmniAccess IAP92 93 105 134 135Document10 pagesOmniAccess IAP92 93 105 134 135ScribdUser250No ratings yet
- GURO21 Course 1 Required Readings PDFDocument57 pagesGURO21 Course 1 Required Readings PDFReign-i FrancisquiteNo ratings yet
- SC 9153Document9 pagesSC 9153tirrexNo ratings yet