Download as pdf or txt
You might also like
- Panton Incompressible Flow Solutions CH 01 - 06Document94 pagesPanton Incompressible Flow Solutions CH 01 - 06Juan_Carlos_Go_749391% (11)
- How To Make An Orgone Field PulserDocument59 pagesHow To Make An Orgone Field PulserDon Templeton100% (2)
- 2007 Damping EstimationDocument9 pages2007 Damping EstimationdasdreadfefaNo ratings yet
- Statistical Modeling of Difusion Processes With Free Knot SplinesDocument24 pagesStatistical Modeling of Difusion Processes With Free Knot SplinesFrank LiuNo ratings yet
- Time-To-Event Prediction With Neural Networks and Cox RegressionDocument30 pagesTime-To-Event Prediction With Neural Networks and Cox RegressionCristóbal Miño MoralesNo ratings yet
- Multi-Step-Ahead Prediction With Neural NetworksDocument12 pagesMulti-Step-Ahead Prediction With Neural NetworksDinibel PérezNo ratings yet
- Whittle LikelihoodDocument4 pagesWhittle LikelihoodNiam ChakmaNo ratings yet
- Hansen 1992Document16 pagesHansen 1992Winalia AgwilNo ratings yet
- Causal Discovery From Temporally Aggregated Time SeriesDocument10 pagesCausal Discovery From Temporally Aggregated Time SeriessahandNo ratings yet
- TN06 - Time Series Technical NoteDocument8 pagesTN06 - Time Series Technical NoteRIDDHI SHETTYNo ratings yet
- Hist Max MinDocument13 pagesHist Max Mindilip7070No ratings yet
- Gaussian Process Approximations of Stochastic Differential EquationDocument16 pagesGaussian Process Approximations of Stochastic Differential EquationaaNo ratings yet
- T Multivareate Wavelet ThresholdingDocument35 pagesT Multivareate Wavelet Thresholdingrotero_pujolNo ratings yet
- 10 1 1 53Document84 pages10 1 1 53Syed RahmanNo ratings yet
- Reliability of StructuresDocument10 pagesReliability of StructureshamadaniNo ratings yet
- Input Window Size and Neural Network Predictors: XT D FXTXT XT N XT D F T T XDocument8 pagesInput Window Size and Neural Network Predictors: XT D FXTXT XT N XT D F T T Xtamas_orban4546No ratings yet
- Seasonality Time-SeriesDocument33 pagesSeasonality Time-SeriesHaNo ratings yet
- Engle 1982Document22 pagesEngle 1982elvisgonzalesarceNo ratings yet
- Neural Networks For Time Series ProcessingDocument26 pagesNeural Networks For Time Series ProcessingdaselknamNo ratings yet
- Royal Society Proceedings: Mathematical, Physical and Engineering SciencesDocument94 pagesRoyal Society Proceedings: Mathematical, Physical and Engineering SciencesJaya KumarNo ratings yet
- CFM Mat FiltDocument13 pagesCFM Mat Filtgregu4No ratings yet
- Thu 1340 EngleDocument36 pagesThu 1340 Engleanon_154643438No ratings yet
- Panel Data Regression Models-SeminarDocument18 pagesPanel Data Regression Models-SeminarAhmad Nadeem MohammadiNo ratings yet
- Testing and Dating of Structural Changes in Practice: Achim Zeileis, Christian Kleiber, Walter Kr+amer, Kurt HornikDocument15 pagesTesting and Dating of Structural Changes in Practice: Achim Zeileis, Christian Kleiber, Walter Kr+amer, Kurt HornikemiNo ratings yet
- Comparison - Two Biomech Measure SystemsDocument36 pagesComparison - Two Biomech Measure SystemsmtwakadNo ratings yet
- Adapting To Unknown Smoothness Via Wavelet ShrinkageDocument28 pagesAdapting To Unknown Smoothness Via Wavelet ShrinkagejebileeNo ratings yet
- C. W. J. Granger and Mark W. WatsonDocument44 pagesC. W. J. Granger and Mark W. WatsonAna ScaletNo ratings yet
- A Primer in Nonparametric EconometricsDocument88 pagesA Primer in Nonparametric EconometricsFabian GouretNo ratings yet
- A Multifrequency Theory of The Interest Rate Term Structure: Laurent Calvet, Adlai Fisher, and Liuren WuDocument24 pagesA Multifrequency Theory of The Interest Rate Term Structure: Laurent Calvet, Adlai Fisher, and Liuren WuTom WuNo ratings yet
- Resolution and Uncertainty in Spectral DecompositionDocument5 pagesResolution and Uncertainty in Spectral DecompositionUrsineset100% (1)
- Dyncomp PreprintDocument9 pagesDyncomp PreprintAmalina SulaimanNo ratings yet
- Recursive Bayesian Estimation Using Gaussian SumsDocument15 pagesRecursive Bayesian Estimation Using Gaussian SumskhanziaNo ratings yet
- Extensions of Compressed Sensing: Yaakov Tsaig David L. Donoho October 22, 2004Document20 pagesExtensions of Compressed Sensing: Yaakov Tsaig David L. Donoho October 22, 2004vliviuNo ratings yet
- Time-Series Analysis of Variable Star Data: Matthew TempletonDocument14 pagesTime-Series Analysis of Variable Star Data: Matthew TempletonSuman MaityNo ratings yet
- Temporal EvolutionDocument18 pagesTemporal EvolutionarchsarkNo ratings yet
- Holtz-Eakin, Newey and Rosen (1988)Document26 pagesHoltz-Eakin, Newey and Rosen (1988)trofffNo ratings yet
- (FEM) Modelación de Elementos Finitos para Transductores UltrasónicosDocument24 pages(FEM) Modelación de Elementos Finitos para Transductores Ultrasónicosrotero_pujolNo ratings yet
- From Denoising Diffusions To Denoising Markov ModelsDocument55 pagesFrom Denoising Diffusions To Denoising Markov ModelsJunwei LuNo ratings yet
- Non-Stationary Extreme Value Analysis in A Changing ClimateDocument17 pagesNon-Stationary Extreme Value Analysis in A Changing ClimateOfosu AnimNo ratings yet
- Series Estacionarias y No EstacionariasDocument29 pagesSeries Estacionarias y No EstacionariasRosendo Ramirez100% (1)
- Skin Effect Numerical MethodsDocument38 pagesSkin Effect Numerical MethodsHamed ShakouriNo ratings yet
- The Hitchhiker's Guide To Nonlinear FilteringDocument64 pagesThe Hitchhiker's Guide To Nonlinear FilteringSungkwan ParkNo ratings yet
- Determination of The Stochastic Evolution Equation From NoisyDocument10 pagesDetermination of The Stochastic Evolution Equation From Noisygeorge lucasNo ratings yet
- Unevenly Spaced Time Series AnalysisDocument44 pagesUnevenly Spaced Time Series AnalysisLennart LibergNo ratings yet
- Temporal Data Mining: Time Series Analysis and Time-Lag DetectionDocument11 pagesTemporal Data Mining: Time Series Analysis and Time-Lag Detectionsankey124No ratings yet
- 1 s2.0 S0378437101001017 Main PDFDocument13 pages1 s2.0 S0378437101001017 Main PDFdocdocopenupNo ratings yet
- Identi Cation, Estimation and Testing of Conditionally Heteroskedastic Factor ModelsDocument0 pagesIdenti Cation, Estimation and Testing of Conditionally Heteroskedastic Factor ModelsPablo FNo ratings yet
- Dynfluid JFM 2018 LoiseauDocument30 pagesDynfluid JFM 2018 Loiseausho bhaNo ratings yet
- Chemical Engineering Science: Erik H Ausler, Piotr Domagalski, Marcel Ottens, Andre BardowDocument6 pagesChemical Engineering Science: Erik H Ausler, Piotr Domagalski, Marcel Ottens, Andre BardowMora TrisNo ratings yet
- Time Series Prediction and Neural Networks: R.J.Frank, N.Davey, S.P.HuntDocument12 pagesTime Series Prediction and Neural Networks: R.J.Frank, N.Davey, S.P.HuntDiyar MuadhNo ratings yet
- Cross-Sectional DependenceDocument5 pagesCross-Sectional DependenceIrfan UllahNo ratings yet
- Testing For Cross-Sectional Dependence in Panel-Data Models: 6, Number 4, Pp. 482-496Document15 pagesTesting For Cross-Sectional Dependence in Panel-Data Models: 6, Number 4, Pp. 482-496Oumaima KASSEMNo ratings yet
- A Non-Parametric Bayesian Approach To Decompounding From High Frequency DataDocument27 pagesA Non-Parametric Bayesian Approach To Decompounding From High Frequency DataprakashNo ratings yet
- Automated Seismic-To-Well Ties?: Roberto Henry Herrera and Mirko Van Der BaanDocument5 pagesAutomated Seismic-To-Well Ties?: Roberto Henry Herrera and Mirko Van Der BaanKrisna Hanjar PrastawaNo ratings yet
- Rainfall Analysis (1) : HydrologyDocument64 pagesRainfall Analysis (1) : Hydrologymrs_minalNo ratings yet
- Short and Long Memory Time Series Models of Relative Humidity of Jos MetropolisDocument9 pagesShort and Long Memory Time Series Models of Relative Humidity of Jos MetropolisseptrichechepNo ratings yet
- Predicting Time Series of Complex Systems: David Rojas Lukas Kroc Marko Thaler, VaDocument14 pagesPredicting Time Series of Complex Systems: David Rojas Lukas Kroc Marko Thaler, VaAbdo SawayaNo ratings yet
- Atomic WedgieDocument8 pagesAtomic WedgieElfawizzyNo ratings yet
- Rietveld MethodDocument14 pagesRietveld MethodSek Wai KianNo ratings yet
- Submitted To The Annals of StatisticsDocument66 pagesSubmitted To The Annals of Statisticsnynster MINNo ratings yet
- Tracking with Particle Filter for High-dimensional Observation and State SpacesFrom EverandTracking with Particle Filter for High-dimensional Observation and State SpacesNo ratings yet
- 096 How Bearings FailDocument4 pages096 How Bearings FailAaron Fulton100% (1)
- Jake Ryan SampleDocument2 pagesJake Ryan SampleAaron FultonNo ratings yet
- Ada 370880wdDocument62 pagesAda 370880wdAaron FultonNo ratings yet
- "Null-E" Magnetic Bearings: A DissertationDocument175 pages"Null-E" Magnetic Bearings: A DissertationAaron FultonNo ratings yet
- Nanocomposite and Nanostructured Tribological Materials For Space ApplicationsDocument8 pagesNanocomposite and Nanostructured Tribological Materials For Space ApplicationsAaron FultonNo ratings yet
- Numerical Simulation of 2D Square Driven Cavity Using Fourth Order Compact Finite Dierence SchemesDocument16 pagesNumerical Simulation of 2D Square Driven Cavity Using Fourth Order Compact Finite Dierence SchemesAaron FultonNo ratings yet
- 3 s2.0 B9DW780815515449500026 MainDocument3 pages3 s2.0 B9DW780815515449500026 MainAaron FultonNo ratings yet
- To Erwin, Linda, Rosanne, and SusanneDocument1 pageTo Erwin, Linda, Rosanne, and SusanneAaron FultonNo ratings yet
- 2013 Oct Purdue lobbyDayAd NovDocument2 pages2013 Oct Purdue lobbyDayAd NovAaron FultonNo ratings yet
- Solution of The Two Dimensional Second Biharmonic Equation With High-Order AccuracyDocument15 pagesSolution of The Two Dimensional Second Biharmonic Equation With High-Order AccuracyAaron FultonNo ratings yet
- 72 1Document7 pages72 1Aaron FultonNo ratings yet
- An Introduction To Stepping Motors: FeaturesDocument41 pagesAn Introduction To Stepping Motors: FeaturesAaron FultonNo ratings yet
- Art:10 1007/BasF00382044 PDFDocument26 pagesArt:10 1007/BasF00382044 PDFAaron FultonNo ratings yet
- Gujarat Technological University: 120 Aditya Silver Oak Institute of Technology, Ahmedabad Gupta Dipika VijayDocument12 pagesGujarat Technological University: 120 Aditya Silver Oak Institute of Technology, Ahmedabad Gupta Dipika VijayDipika GuptaNo ratings yet
- Catálogo Caterpillar - Motores e GeradoresDocument106 pagesCatálogo Caterpillar - Motores e GeradoresFranciele GomesNo ratings yet
- Nism PGPSM ProspectusDocument13 pagesNism PGPSM ProspectusTeja NukalaNo ratings yet
- TCVN 6772-2000 Waste Water Quality (English Version)Document2 pagesTCVN 6772-2000 Waste Water Quality (English Version)limchNo ratings yet
- ASTM D945 - Rubber Shear ModulusDocument11 pagesASTM D945 - Rubber Shear ModulusLai DieuNo ratings yet
- Module 28 Solution Brittle Coulomb Mohr TheoryDocument2 pagesModule 28 Solution Brittle Coulomb Mohr TheoryWolf LordNo ratings yet
- Vertical Multistage Centrifugal Pumps Pvm/Pvmi/PvmxDocument33 pagesVertical Multistage Centrifugal Pumps Pvm/Pvmi/PvmxKenneth SanchezNo ratings yet
- Stub Series Terminated Logic For 2.5 Volts (SSTL - 2)Document21 pagesStub Series Terminated Logic For 2.5 Volts (SSTL - 2)elberusNo ratings yet
- Alpha1 Series PC Communication Protocol561785 PDFDocument1 pageAlpha1 Series PC Communication Protocol561785 PDFpancawawanNo ratings yet
- Radglo GM: Technical Data SheetDocument1 pageRadglo GM: Technical Data SheetChayut ThongphasukNo ratings yet
- Panasonic Workio 1510Document394 pagesPanasonic Workio 1510Abderrahim HameurlaineNo ratings yet
- Penawaran Harga Mowa@ Astra Honda Motor Office JakartaDocument3 pagesPenawaran Harga Mowa@ Astra Honda Motor Office JakartaYulianto EkoNo ratings yet
- Prodelin 1251Document2 pagesProdelin 1251Marcos Della MeaNo ratings yet
- Pscad THD RasvjetaDocument6 pagesPscad THD RasvjetaivanramljakNo ratings yet
- Two Port NetworkDocument26 pagesTwo Port NetworkAnshul ManiNo ratings yet
- Final 8 PicDocument12 pagesFinal 8 PicHaryy PrabowoNo ratings yet
- Pump Performance Test ProcedureDocument11 pagesPump Performance Test ProcedureAryaNo ratings yet
- P Spice TutorialDocument9 pagesP Spice TutorialPeiHanTseringNo ratings yet
- Piston Diagnosis Piston Diagnosis - A Rough Guide: Generally Well Set UpDocument7 pagesPiston Diagnosis Piston Diagnosis - A Rough Guide: Generally Well Set UpÁlvaro Jiménez OrtizNo ratings yet
- Therminol Information Bulletin No.2: In-Use Testing of Therminol Heat Transfer FluidsDocument4 pagesTherminol Information Bulletin No.2: In-Use Testing of Therminol Heat Transfer FluidsSteranskoNo ratings yet
- Wo 2013104042 A 1Document7 pagesWo 2013104042 A 1Mladen MuskinjaNo ratings yet
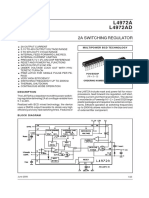
- L4972ADocument23 pagesL4972ARICHIHOTS2No ratings yet
- Progress Report: Project DetailsDocument4 pagesProgress Report: Project DetailsSOMNATH JANANo ratings yet
- Riverbed Mining GuidelinesDocument5 pagesRiverbed Mining GuidelinesLori PierceNo ratings yet
- Hadfield MN SteelDocument16 pagesHadfield MN SteelX048Anshul JumoreNo ratings yet
- Clean Alternative Energy - Searl Effect Generators: Business PlanDocument18 pagesClean Alternative Energy - Searl Effect Generators: Business PlanFernando CastilloNo ratings yet
- Variable Capacity CompressorsDocument41 pagesVariable Capacity CompressorszdravkorrNo ratings yet
- Aroosha OSS: Change ManagementDocument55 pagesAroosha OSS: Change Managementsemko2No ratings yet
- Textile Fashion Study Polyester - Physical and Chemical Properties of PolyesterDocument5 pagesTextile Fashion Study Polyester - Physical and Chemical Properties of PolyesternikNo ratings yet