Download as pdf or txt
You might also like
- PROJECT ON SYNCHRONOUS FIFO DESIGN, SIMULATION, VERIFICATION and SYNTHESIS Using VERILOGDocument47 pagesPROJECT ON SYNCHRONOUS FIFO DESIGN, SIMULATION, VERIFICATION and SYNTHESIS Using VERILOGasimanand100% (15)
- Fifo Implementation in VerilogDocument34 pagesFifo Implementation in Veriloggeetscribd67% (3)
- ACLS Study Guide NewDocument35 pagesACLS Study Guide NewNIRANJANA SHALINI100% (1)
- 16FUSB Project - 1.2Document16 pages16FUSB Project - 1.2Emanuel Paz100% (2)
- Chap 2 and 3Document75 pagesChap 2 and 3vijayprahuNo ratings yet
- 2001mar28 Mem CT An1 PDFDocument6 pages2001mar28 Mem CT An1 PDFSuvendra SahooNo ratings yet
- Understanding Synchronous Fifos: Author: Cypress Associated Part FamilyDocument10 pagesUnderstanding Synchronous Fifos: Author: Cypress Associated Part FamilySainadh YerrapragadaNo ratings yet
- Project Report ON: Implementation of Synchronous FIFODocument21 pagesProject Report ON: Implementation of Synchronous FIFOSANCHIT KULKARNINo ratings yet
- Fifo DesignDocument43 pagesFifo Designbviswanath84No ratings yet
- Implementation of A Multi-Channel UART Controller Based On FIFO Technique and FPGADocument5 pagesImplementation of A Multi-Channel UART Controller Based On FIFO Technique and FPGAJNRNo ratings yet
- Irjet V7i9381Document5 pagesIrjet V7i9381anand kumarNo ratings yet
- Implementation of Synchronous FIFO Memory Module: ArchitectureDocument2 pagesImplementation of Synchronous FIFO Memory Module: Architecturenandipati ravikanthNo ratings yet
- For Example, A Queue of Customers at The Checkout Point in A Supermarket or Cars Backed Up at Traffic LightsDocument10 pagesFor Example, A Queue of Customers at The Checkout Point in A Supermarket or Cars Backed Up at Traffic LightsRakesh ReddyNo ratings yet
- Design of Synchronous FifoDocument18 pagesDesign of Synchronous Fifoprasu440No ratings yet
- Design, Verification AND Synthesis OF Synchronous FifoDocument43 pagesDesign, Verification AND Synthesis OF Synchronous FifoMohit GuptaNo ratings yet
- New Asynchronous Fifo DesignDocument11 pagesNew Asynchronous Fifo DesignHitesh AhujaNo ratings yet
- CAD_PROJECTDocument54 pagesCAD_PROJECTh20230162No ratings yet
- FIFO Is An: Acronym Queue First-Come, First-ServedDocument3 pagesFIFO Is An: Acronym Queue First-Come, First-Servedvivekanand_bonalNo ratings yet
- Async Fifo PDFDocument12 pagesAsync Fifo PDFMukund ShahNo ratings yet
- Implementation of Fifo Memory in Verilog: Nabeel Ahmad M. Tech. (1 Sem) Microelectronics and VLSI DesignDocument11 pagesImplementation of Fifo Memory in Verilog: Nabeel Ahmad M. Tech. (1 Sem) Microelectronics and VLSI DesignNabeel AhmadNo ratings yet
- AsignmentDocument2 pagesAsignmentAhmed ShafeekNo ratings yet
- Asynchronous FIFOsDocument5 pagesAsynchronous FIFOsThanki Dipesh SNo ratings yet
- Analysis of Buffer Overflow AttacksDocument13 pagesAnalysis of Buffer Overflow AttacksliveshellNo ratings yet
- ROS8 User Manual 2 1Document16 pagesROS8 User Manual 2 1Edge-TecNo ratings yet
- Asynchronous FIFO FinalDocument16 pagesAsynchronous FIFO FinalAyush Katyal100% (1)
- Design & Verification of FIFODocument7 pagesDesign & Verification of FIFOmohini akhareNo ratings yet
- Design & Verification of FIFODocument7 pagesDesign & Verification of FIFOmohini akhareNo ratings yet
- Improving Timing For FIFO by Adding RegistersDocument7 pagesImproving Timing For FIFO by Adding RegistersXiang LiNo ratings yet
- SpecrefDocument30 pagesSpecrefcsis122labsNo ratings yet
- Design of An Efficient FIFO Buffer For Network On Chip RoutersDocument4 pagesDesign of An Efficient FIFO Buffer For Network On Chip RoutersAmityUniversity IIcNo ratings yet
- Interfacing Enhanced Parallel PortDocument6 pagesInterfacing Enhanced Parallel PortjmbatabatNo ratings yet
- Fifo and Ring BufferDocument3 pagesFifo and Ring BufferDuong Phi ThucNo ratings yet
- ASIC Verification - FIFODocument4 pagesASIC Verification - FIFOprodip7No ratings yet
- RinkiDocument4 pagesRinkiRinki SoniNo ratings yet
- Very Large Instruction Word (Vliw) Processors: What Is Good and What Is Bad With Superscalars ?Document11 pagesVery Large Instruction Word (Vliw) Processors: What Is Good and What Is Bad With Superscalars ?Avinash KumarNo ratings yet
- Alph Smashing SecurityDocument28 pagesAlph Smashing Securityj4sonlyNo ratings yet
- Execution Unit (EU) : Instruction Queue, and The Instruction Pointer. It Has The Task of Making Sure That The BusDocument10 pagesExecution Unit (EU) : Instruction Queue, and The Instruction Pointer. It Has The Task of Making Sure That The BusPradeep RanaNo ratings yet
- FIFOs Are Commonly Used inDocument2 pagesFIFOs Are Commonly Used inJoel VindasNo ratings yet
- 09 Fifo SynchronizationDocument4 pages09 Fifo SynchronizationkoorapatisagarNo ratings yet
- Implementation Methodology of High Performance Multi Byte Data Access Control of AMBA BusDocument5 pagesImplementation Methodology of High Performance Multi Byte Data Access Control of AMBA BusKumar Goud.KNo ratings yet
- FIFODocument6 pagesFIFOvimal rajNo ratings yet
- Asynchronous FIFO Design Using Verilog PDFDocument15 pagesAsynchronous FIFO Design Using Verilog PDFUjjwal AggarwalNo ratings yet
- FifoDocument4 pagesFifoVasanth Kumar M H0% (1)
- Chapter 4.1 Basics of PLC Programming - ADocument80 pagesChapter 4.1 Basics of PLC Programming - Apkn2611200312No ratings yet
- CH 1Document7 pagesCH 1Michael ZewdieNo ratings yet
- FIFODocument4 pagesFIFORitesh SharmaNo ratings yet
- Information Security Unit1bDocument9 pagesInformation Security Unit1bSubash ChandraNo ratings yet
- MP SoluDocument21 pagesMP SoluAhmad MukaddasNo ratings yet
- L6 Data Transfer InstructionsDocument15 pagesL6 Data Transfer InstructionsVityaNo ratings yet
- Designing A Kernel Key Logger: A Filter Driver TutorialDocument5 pagesDesigning A Kernel Key Logger: A Filter Driver Tutorialjfreddy82No ratings yet
- Discontinued: Synchronous FIFO 5.0Document10 pagesDiscontinued: Synchronous FIFO 5.0Prathap NsNo ratings yet
- Cyasm Assembler User'S Guide: March 3, 1998Document33 pagesCyasm Assembler User'S Guide: March 3, 1998ronysjNo ratings yet
- DG Nvmeip Refdesign Intel enDocument22 pagesDG Nvmeip Refdesign Intel enEduar AndresNo ratings yet
- IP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsFrom EverandIP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Answersbook PDFDocument106 pagesAnswersbook PDFmadhu.nandha9285No ratings yet
- Fifo Applications Guide: September 1999Document73 pagesFifo Applications Guide: September 1999madhu.nandha9285No ratings yet
- Edge Detector 1-Rising Edge Detect ("0" To "1" Transition)Document3 pagesEdge Detector 1-Rising Edge Detect ("0" To "1" Transition)madhu.nandha9285No ratings yet
- DO-254/CTS™: FPGA Level In-Target TestingDocument2 pagesDO-254/CTS™: FPGA Level In-Target Testingmadhu.nandha9285No ratings yet
- School of Electrical, Computer and Energy Engineering, Arizona State University, Tempe, AZ Qianxu@asu - Edu, Chaitali@asu - Edu, Karam@asu - EduDocument6 pagesSchool of Electrical, Computer and Energy Engineering, Arizona State University, Tempe, AZ Qianxu@asu - Edu, Chaitali@asu - Edu, Karam@asu - Edumadhu.nandha9285No ratings yet
- A Novel Approach To Design BCD Adder and Carry Skip BCD AdderDocument6 pagesA Novel Approach To Design BCD Adder and Carry Skip BCD Addermadhu.nandha9285No ratings yet
- URS Fatigue Evaluation and Redundancy AnalysisDocument2 pagesURS Fatigue Evaluation and Redundancy Analysismadhu.nandha9285No ratings yet
- Data Acquisition, Representation and Reconstruction: Jian Huang, CS 594, Spring 2002Document71 pagesData Acquisition, Representation and Reconstruction: Jian Huang, CS 594, Spring 2002madhu.nandha9285No ratings yet
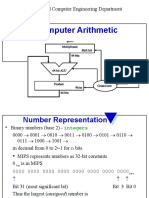
- Computer Arithmetic: Electrical and Computer Engineering DepartmentDocument72 pagesComputer Arithmetic: Electrical and Computer Engineering Departmentmadhu.nandha9285No ratings yet
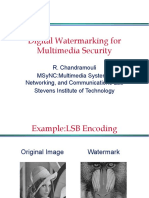
- Digital Watermarking For Multimedia SecurityDocument29 pagesDigital Watermarking For Multimedia Securitymadhu.nandha9285No ratings yet
- A Framework For Improving Advertising Creative Using Digital MeasurementDocument15 pagesA Framework For Improving Advertising Creative Using Digital MeasurementMs Mariia MykhailenkoNo ratings yet
- PayfixationoptionsDocument5 pagesPayfixationoptionsGK TiwariNo ratings yet
- Ibabm-Ddcs-Monitor v1.8 en A4Document26 pagesIbabm-Ddcs-Monitor v1.8 en A4Deepak PatelNo ratings yet
- (INTRA) - DEC2020-Presntation-MUHAMMAD AMIRUL AKASHAH BIN MOHD FAHMIDocument18 pages(INTRA) - DEC2020-Presntation-MUHAMMAD AMIRUL AKASHAH BIN MOHD FAHMIasfafasfNo ratings yet
- Profile: NR Technoserve Pvt. Ltd. 2016 - PresentDocument2 pagesProfile: NR Technoserve Pvt. Ltd. 2016 - PresentSuvam MohapatraNo ratings yet
- Corpo 106 01Document49 pagesCorpo 106 01Richie SalubreNo ratings yet
- Consumer Redress: Fair Trade Enforcement BureauDocument47 pagesConsumer Redress: Fair Trade Enforcement BureauMaria LovesongorNo ratings yet
- July 2011 Jacksonville ReviewDocument36 pagesJuly 2011 Jacksonville ReviewThe Jacksonville ReviewNo ratings yet
- Training LV PanelDocument108 pagesTraining LV PanelruslanNo ratings yet
- Accounting Q&ADocument6 pagesAccounting Q&AIftikharNo ratings yet
- Minerals Potential - Minerals Law of Lao PDRDocument44 pagesMinerals Potential - Minerals Law of Lao PDRkhamsone pengmanivongNo ratings yet
- Notice of Meeting-1st MDC Ldip Alignment Meeting & WsDocument5 pagesNotice of Meeting-1st MDC Ldip Alignment Meeting & WsByaheng CawayanNo ratings yet
- Product Detail Sheet: 3/4" Palnut Type LocknutDocument3 pagesProduct Detail Sheet: 3/4" Palnut Type LocknutthorenNo ratings yet
- Chase: Eventhough This Case Shows How Campany Hires and Layoffs Strategy Would Work Best Due To Unstable Demand ForcestDocument3 pagesChase: Eventhough This Case Shows How Campany Hires and Layoffs Strategy Would Work Best Due To Unstable Demand ForcestCristhian ValverdeNo ratings yet
- A 200 Word Essay OnDocument9 pagesA 200 Word Essay OnANANDRAJ HARIHARANNo ratings yet
- Food Safety: Research PaperDocument6 pagesFood Safety: Research PaperJon Slavin100% (1)
- Consignment SalesDocument11 pagesConsignment SalesMaritess LobrigoNo ratings yet
- Dicionário Assírio SDocument452 pagesDicionário Assírio SAlexandre Luis Dos Santos100% (1)
- Trad Ic Mock ExamDocument15 pagesTrad Ic Mock ExamArvin AltamiaNo ratings yet
- Formulas To LearnDocument3 pagesFormulas To LearnHuệ LêNo ratings yet
- CV (2) - 2Document3 pagesCV (2) - 2abhishek.berkmanNo ratings yet
- Course Syllabus Electrical Machines II Summer SemesterDocument4 pagesCourse Syllabus Electrical Machines II Summer SemesterMahmoud Alshar'eNo ratings yet
- Yongcao 2008Document15 pagesYongcao 2008madebyNo ratings yet
- Portfolio AnswersDocument4 pagesPortfolio Answersa73609No ratings yet
- Etabloc Syt Operating InstructionsDocument50 pagesEtabloc Syt Operating InstructionsFayeez MukadamNo ratings yet
- Cdi 3Document39 pagesCdi 3Argencel MaddelaNo ratings yet
- Smart Monitoring of Food SpoilageDocument31 pagesSmart Monitoring of Food Spoilagehimani dewanganNo ratings yet
- Customer Perception Towards Bharti Axa Life Insurance Co. Ltd. atDocument94 pagesCustomer Perception Towards Bharti Axa Life Insurance Co. Ltd. atShubham MishraNo ratings yet
- Insta Grid Investors OpportunityDocument14 pagesInsta Grid Investors OpportunityShawn Paul BoikeNo ratings yet