Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 00 IntroductionDocument15 pages00 IntroductionEzhilarasan KaliyamoorthyNo ratings yet
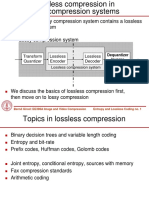
- 01 EntropyLosslessCoding PDFDocument29 pages01 EntropyLosslessCoding PDFEzhilarasan KaliyamoorthyNo ratings yet
- Advanced in The VLSI Design Flow PDFDocument47 pagesAdvanced in The VLSI Design Flow PDFEzhilarasan KaliyamoorthyNo ratings yet
- Microprocessor Architecture: Introduction To Microprocessors Chapter 2Document47 pagesMicroprocessor Architecture: Introduction To Microprocessors Chapter 2Ezhilarasan KaliyamoorthyNo ratings yet
- Syllabus 2010 Schme ECE SignedDocument115 pagesSyllabus 2010 Schme ECE SignedEzhilarasan KaliyamoorthyNo ratings yet
- Pid PostDocument33 pagesPid PostosamahNo ratings yet
- Name: - ScoreDocument5 pagesName: - ScoreWemn JuniofNo ratings yet
- Notes 04 - Block ManipulationDocument2 pagesNotes 04 - Block ManipulationMan JaNo ratings yet
- Applied Statistics and Probability For Engineers: Sixth EditionDocument56 pagesApplied Statistics and Probability For Engineers: Sixth EditionOliver Abordo100% (1)
- Maths Igcse Textbook 11Document1 pageMaths Igcse Textbook 11agensipekerjaancanggihNo ratings yet
- Keldysh PDFDocument8 pagesKeldysh PDFElektronika PMFNo ratings yet
- Chapter 3Document48 pagesChapter 3Karena GillNo ratings yet
- Unit 1 Steady & Variable Stresses in Machine Members: Design of Machine ElementsDocument30 pagesUnit 1 Steady & Variable Stresses in Machine Members: Design of Machine ElementsPrasanth YuviNo ratings yet
- Decimal Notation and Rounding Notes Math 0106Document5 pagesDecimal Notation and Rounding Notes Math 0106Jayson NolascoNo ratings yet
- A Feasibility Study On Real-Time Gender Recognition: IjarcceDocument7 pagesA Feasibility Study On Real-Time Gender Recognition: IjarcceAnil Kumar BNo ratings yet
- 2 Fault Types ModelingDocument9 pages2 Fault Types ModelingkvinothscetNo ratings yet
- M4310students PDFDocument68 pagesM4310students PDFsbfjbsjkbfNo ratings yet
- 1-2 Practice - BDocument3 pages1-2 Practice - BStanleyNo ratings yet
- Thermo PDFDocument5 pagesThermo PDFjayven minguillanNo ratings yet
- TEST5Document48 pagesTEST5Aamir SohailNo ratings yet
- An Immersed Boundary Method With Direct Forcing For The Simulation of Particulate FlowsDocument29 pagesAn Immersed Boundary Method With Direct Forcing For The Simulation of Particulate FlowsKian ChuanNo ratings yet
- Morse-VibrationAndSound DjvuDocument839 pagesMorse-VibrationAndSound DjvuBhaveshNo ratings yet
- CLior ScaleDocument9 pagesCLior ScaleResearch ConsultantNo ratings yet
- In-Place Sorting and Not-In-Place SortingDocument23 pagesIn-Place Sorting and Not-In-Place SortingLeary John TambagahanNo ratings yet
- Chapter-3: Trigonometric Functions: MCQ / One Mark QuestionsDocument2 pagesChapter-3: Trigonometric Functions: MCQ / One Mark Questionssushil tripathiNo ratings yet
- 20150409122653633Document13 pages20150409122653633Aditya Anggun WijayaNo ratings yet
- Oxford Mathematics: Primary Years ProgrammeDocument11 pagesOxford Mathematics: Primary Years ProgrammeDaw SoeNo ratings yet
- Q No. 1 Bisection Method MATLAB Code: - : Short All AllDocument29 pagesQ No. 1 Bisection Method MATLAB Code: - : Short All AllEngrSalman khanNo ratings yet
- DC TP PrelimDocument2 pagesDC TP PrelimKristel BoralNo ratings yet
- 2 - Laser - Lipolysis - 1 - 0Document12 pages2 - Laser - Lipolysis - 1 - 0Gustavo DolinskyNo ratings yet
- Hover Gliders: ObjectivesDocument5 pagesHover Gliders: ObjectivesBlack0utNo ratings yet
- Mindsight CodexDocument87 pagesMindsight CodexFathin NafisaNo ratings yet
- Butterfly Vale LossesDocument12 pagesButterfly Vale LossesNguyễn Thống NhấtNo ratings yet
- Microcontroller Lab Manual 2018-19 5th SemDocument68 pagesMicrocontroller Lab Manual 2018-19 5th Semsandeep sNo ratings yet