Download as pdf or txt
You might also like
- Lab 8Document8 pagesLab 8alif fudenNo ratings yet
- Design of T-Coils Using Agilent Genesys PDFDocument54 pagesDesign of T-Coils Using Agilent Genesys PDFkumargpalaniNo ratings yet
- Navodila enDocument14 pagesNavodila enAdis SaracNo ratings yet
- Lab 4Document11 pagesLab 4Tapas MandalNo ratings yet
- Low-Pass Filter Approximation With Evolutionary Techniques: Umut Engin Ayten, Revna Acar Vural and Tulay YildirimDocument5 pagesLow-Pass Filter Approximation With Evolutionary Techniques: Umut Engin Ayten, Revna Acar Vural and Tulay YildirimtsegayNo ratings yet
- Lab.6&7. IIR FiltersDocument8 pagesLab.6&7. IIR FiltershimNo ratings yet
- Lec 23Document22 pagesLec 23Khajavali ShaikNo ratings yet
- MultiRate 2Document178 pagesMultiRate 2IamINNo ratings yet
- Circuit and Signal FinalDocument15 pagesCircuit and Signal FinalZeyad Tareq Al SaroriNo ratings yet
- 18ee63 DSP Module-3Document19 pages18ee63 DSP Module-3Appasabgouda BiradarNo ratings yet
- Practical Microwave Filter DesignDocument5 pagesPractical Microwave Filter Designbongoloid100% (1)
- Audio Sieving Using Signal FiltersDocument19 pagesAudio Sieving Using Signal FiltersPiyush YadavNo ratings yet
- Design and Analysis of A 2.4 GHZ, Fifth - Order Chebyshev Microstrip LPFDocument6 pagesDesign and Analysis of A 2.4 GHZ, Fifth - Order Chebyshev Microstrip LPFJournal of TelecommunicationsNo ratings yet
- Implementation of Resonant Controllers and Filters in Fixed-Point ArithmeticDocument9 pagesImplementation of Resonant Controllers and Filters in Fixed-Point Arithmeticmipanduro7224No ratings yet
- Lab 5. FIR Filter Design in MatlabDocument14 pagesLab 5. FIR Filter Design in MatlabShreyash SillNo ratings yet
- L 6Document11 pagesL 6mxjoeNo ratings yet
- EQ Coefficients PDFDocument15 pagesEQ Coefficients PDFcristian1961No ratings yet
- 6 Signal Flowgraphs: 6.1 DescriptionDocument14 pages6 Signal Flowgraphs: 6.1 DescriptionYuqi ZhaoNo ratings yet
- Chapter 4Document39 pagesChapter 4Shoaib MughalNo ratings yet
- Docs MkfilterDocument6 pagesDocs Mkfilterfaroo28No ratings yet
- Rice 0433Document29 pagesRice 0433Gustavo de carvalhoNo ratings yet
- IIR Digital Filtyttyer Structures Filter DesignDocument35 pagesIIR Digital Filtyttyer Structures Filter DesignSiddarth MadanNo ratings yet
- Analog Filter Design Demystified: The Theory of Analog ElectronicsDocument11 pagesAnalog Filter Design Demystified: The Theory of Analog ElectronicsSanjay Parelkar100% (1)
- Bluestein-S FFT AlgorithmDocument3 pagesBluestein-S FFT AlgorithmManish BansalNo ratings yet
- Filters 2Document60 pagesFilters 2Nguyễn Hoàng KhaNo ratings yet
- FIR Filter Design by WindowingDocument6 pagesFIR Filter Design by Windowingshabbir470No ratings yet
- VivaDocument7 pagesVivaJobin Philip VargheseNo ratings yet
- 5filter Design EquilizationDocument11 pages5filter Design EquilizationharithNo ratings yet
- Butterworth Filter DesignDocument12 pagesButterworth Filter DesignVannyMeiSariNo ratings yet
- Program: B.Tech Subject Name: Digital Signal Processing Subject Code: EC-601 Semester: 6Document11 pagesProgram: B.Tech Subject Name: Digital Signal Processing Subject Code: EC-601 Semester: 6Reena ShahaNo ratings yet
- Digital Signal Processing Prof. S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 38 FIR DesignDocument18 pagesDigital Signal Processing Prof. S. C. Dutta Roy Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 38 FIR DesigndanielNo ratings yet
- 20116052-DSP Term ProjectDocument14 pages20116052-DSP Term ProjectH052 Rajesh Komaravalli ECENo ratings yet
- Ring FilterDocument3 pagesRing FilterAlagiri IndiaNo ratings yet
- Bessel Filter Crossover and Its Relation To OthersDocument8 pagesBessel Filter Crossover and Its Relation To OthersSt ChristianNo ratings yet
- 1374 4918 1 PBDocument4 pages1374 4918 1 PBHicham BenmoussaNo ratings yet
- 7 Filter Application of FourierDocument19 pages7 Filter Application of FouriermbathulaNo ratings yet
- PLLTutorial ISSCC2004Document131 pagesPLLTutorial ISSCC2004Siddharth MathurNo ratings yet
- Filters2 PDFDocument60 pagesFilters2 PDFTuấnNguyễnNo ratings yet
- Passiv SignalDocument14 pagesPassiv SignalDan AdrianNo ratings yet
- Perturbative QCDDocument45 pagesPerturbative QCDfisica_musicaNo ratings yet
- The Stabilization of Two-Dimensional Recursive Filters Via The Discrete Hilbert TransformDocument8 pagesThe Stabilization of Two-Dimensional Recursive Filters Via The Discrete Hilbert Transformkarraja699No ratings yet
- Design of FIR Filters With Better Performance Using Z-WindowDocument5 pagesDesign of FIR Filters With Better Performance Using Z-WindowJoshua DusariNo ratings yet
- BJT Frequency ResponseDocument48 pagesBJT Frequency ResponseMirl JohvanNo ratings yet
- Yeh07 Dafx Distortion PDFDocument8 pagesYeh07 Dafx Distortion PDFssslayerNo ratings yet
- Distributed-Element Reflectionless Bandstop Filter With A Broadband Impedance MatchingDocument4 pagesDistributed-Element Reflectionless Bandstop Filter With A Broadband Impedance Matchinglsdlsd505496601No ratings yet
- S32104006W+Likando Mubita+DSP2022Document14 pagesS32104006W+Likando Mubita+DSP2022kaviyeluNo ratings yet
- Lab 5. FIR & IIR Filters in Matlab: Filter DesignDocument12 pagesLab 5. FIR & IIR Filters in Matlab: Filter DesignDrakshayaniMurgodNo ratings yet
- Butterworth Filter Design With A Low Pass ButterworthDocument10 pagesButterworth Filter Design With A Low Pass ButterworthPeter MossNo ratings yet
- CFD at Chapter-3Document22 pagesCFD at Chapter-3Pawan KumarNo ratings yet
- ACES Journal Paper GuidelinesDocument4 pagesACES Journal Paper GuidelinesRabbia SalmanNo ratings yet
- 0300smith46 - The Fundamentals of Linear-Phase Filters For Digital Communications PDFDocument5 pages0300smith46 - The Fundamentals of Linear-Phase Filters For Digital Communications PDFjoe2001coolNo ratings yet
- Lab 5Document11 pagesLab 5Kishore KumarNo ratings yet
- Assignment 0f PMDocument14 pagesAssignment 0f PMMirza AzeemNo ratings yet
- DSP-5 (Iir) (S)Document55 pagesDSP-5 (Iir) (S)Jyothi JoNo ratings yet
- Design and Implementation of IIR FilterDocument45 pagesDesign and Implementation of IIR FilterSaurabh Shukla67% (3)
- ENTC 3320: Active FiltersDocument60 pagesENTC 3320: Active FiltersAbdullah NisarNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Transitions from Digital Communications to Quantum Communications: Concepts and ProspectsFrom EverandTransitions from Digital Communications to Quantum Communications: Concepts and ProspectsNo ratings yet
- Digital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionFrom EverandDigital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionNo ratings yet
- The Volatility Surface: A Practitioner's GuideFrom EverandThe Volatility Surface: A Practitioner's GuideRating: 4 out of 5 stars4/5 (4)
- Music Theory (Jason Allen) (Summarized by Elve)Document28 pagesMusic Theory (Jason Allen) (Summarized by Elve)elveNo ratings yet
- Economic SectionsDocument13 pagesEconomic SectionsArvin NaborNo ratings yet
- Design and Development of Automatic Wheelchair Cum Patient BedDocument90 pagesDesign and Development of Automatic Wheelchair Cum Patient BedSRL MECHNo ratings yet
- UG Demand Forecasting Revenue ManagementDocument16 pagesUG Demand Forecasting Revenue ManagementRadu BadoiuNo ratings yet
- Nso Class-7Document3 pagesNso Class-7Swati AshtakeNo ratings yet
- Chap 1 Colloidal Dispersion 2017-2018Document24 pagesChap 1 Colloidal Dispersion 2017-2018Enzo BelliniNo ratings yet
- Assignment 4Document15 pagesAssignment 4api-479141525No ratings yet
- DCL Commands (Oracle)Document14 pagesDCL Commands (Oracle)Prasanthi KolliNo ratings yet
- Azure InterviewDocument4 pagesAzure InterviewsatishNo ratings yet
- Fertigation in Horticultural CropsDocument15 pagesFertigation in Horticultural CropstellashokNo ratings yet
- GRDSLABDocument22 pagesGRDSLABCesar Rosas100% (1)
- Rotational Molding DesignDocument110 pagesRotational Molding Designdamonlanglois100% (1)
- The Prediction of Gold Price Using ARIMA Model: Abstract-Although, 2016 and 2017 Have Risen, The InternationalDocument4 pagesThe Prediction of Gold Price Using ARIMA Model: Abstract-Although, 2016 and 2017 Have Risen, The InternationalpydyNo ratings yet
- 48900Document22 pages48900Jeff RobertNo ratings yet
- 4e HydraulischePressenDocument28 pages4e HydraulischePressenTirtheshwar Singh100% (1)
- What Is Piezoelectric Sensor - Construction, Working & ApplicationsDocument4 pagesWhat Is Piezoelectric Sensor - Construction, Working & ApplicationsSam BelloNo ratings yet
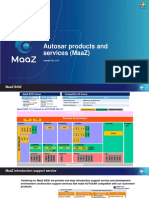
- Autosar Products and Services (Maaz) : SoftwareDocument12 pagesAutosar Products and Services (Maaz) : Softwarethanhmaikmt123456No ratings yet
- Page Description Change: Elektrobudowa SaDocument2 pagesPage Description Change: Elektrobudowa SaLý Chính ĐạoNo ratings yet
- Math T STPM Semester 1 2014Document2 pagesMath T STPM Semester 1 2014tchinhuat82No ratings yet
- Interaction of Metformin and Nifedipine in Type II Diabetic Patients With HypertensionDocument5 pagesInteraction of Metformin and Nifedipine in Type II Diabetic Patients With HypertensionAndi PermanaNo ratings yet
- CH 07 TifDocument29 pagesCH 07 TifMaha HamdyNo ratings yet
- DUALCON 3 Product ManualDocument16 pagesDUALCON 3 Product ManualSuryadiNo ratings yet
- Prof. S. Raman Sankaranarayanan (SRS), Assistant Professor, MMEDocument35 pagesProf. S. Raman Sankaranarayanan (SRS), Assistant Professor, MMESanjeev SahuNo ratings yet
- Pages From Glencoe - Chemistry - Matter and Change Mcgraw 2008 CH 1Document26 pagesPages From Glencoe - Chemistry - Matter and Change Mcgraw 2008 CH 1api-261034721No ratings yet
- QRCMDocument7 pagesQRCMAiyappa DevrajNo ratings yet
- Loci and Construction: NameDocument8 pagesLoci and Construction: Namecarolinethami13No ratings yet
- R-12-090 - Pressure Meter Test ReportDocument30 pagesR-12-090 - Pressure Meter Test ReportRaghu Prakash ANo ratings yet
- Catalogue Bernecker - Pipe ClampsDocument15 pagesCatalogue Bernecker - Pipe ClampsJunior CorrêaNo ratings yet
- Ficha Tecnica GENIE Z-3422NDocument2 pagesFicha Tecnica GENIE Z-3422NChristian Muñoz EquimmatNo ratings yet