Download as pdf or txt
You might also like
- Vibrating Beam Lab ReportDocument13 pagesVibrating Beam Lab ReportSteven Giffney100% (1)
- Vibrations Lab ReportDocument16 pagesVibrations Lab ReportJawad Hussain100% (1)
- Spring Oscillator Lab ReportDocument10 pagesSpring Oscillator Lab ReportVincent Vuong100% (2)
- ZinsserDocument77 pagesZinsserZephir AWTNo ratings yet
- Post Lab ReportDocument8 pagesPost Lab Reportallan_zirconia444No ratings yet
- 2016 PhysicaEDocument6 pages2016 PhysicaEcvstan67No ratings yet
- A Self-Excited Acoustical System For Stress Measurment in A Cement PlantDocument6 pagesA Self-Excited Acoustical System For Stress Measurment in A Cement PlantAli hayekNo ratings yet
- ICME09-AM-17: Anirban Mitra, Prasanta Sahoo and Kashinath SahaDocument6 pagesICME09-AM-17: Anirban Mitra, Prasanta Sahoo and Kashinath SahaFGHUIJNo ratings yet
- 4.5 Rating Power Systems For Earthquake Safety: 4.5.1 General PrinciplesDocument14 pages4.5 Rating Power Systems For Earthquake Safety: 4.5.1 General PrinciplesNur FajarNo ratings yet
- Base Strain Effects On Force Measurements: by P. Cappa and K. G. McconnellDocument6 pagesBase Strain Effects On Force Measurements: by P. Cappa and K. G. McconnellFrontiersNo ratings yet
- Magnetic Reconnection Controlled by External Current DriveDocument10 pagesMagnetic Reconnection Controlled by External Current DriveScriblazNo ratings yet
- Demonstration of The Casimir Force in The 0.6 To 6 MM RangeDocument4 pagesDemonstration of The Casimir Force in The 0.6 To 6 MM RangeEdson CezarNo ratings yet
- ResonanciaBak Stachowicz Noga Skrzat Effect 27 2016Document6 pagesResonanciaBak Stachowicz Noga Skrzat Effect 27 2016Joe Cristian Arias GalvánNo ratings yet
- Grounding Grid Safety Evaluation Under Lightning CurrentDocument5 pagesGrounding Grid Safety Evaluation Under Lightning CurrentyimypatrickNo ratings yet
- Asymmetric Non-Linear Forced Vibrations of Free-Edge Circular Plates. Part II: ExperimentsDocument27 pagesAsymmetric Non-Linear Forced Vibrations of Free-Edge Circular Plates. Part II: ExperimentsUmanath R PoojaryNo ratings yet
- Central Aerohydrodynamic Institute N.A. Prof. N.E. Zhukovsky (Tsagi) 140180, Zhukovsky, Moscow Region, RussiaDocument2 pagesCentral Aerohydrodynamic Institute N.A. Prof. N.E. Zhukovsky (Tsagi) 140180, Zhukovsky, Moscow Region, RussiaYuryNo ratings yet
- Analysis of Nonlinear Vibro-Acoustic Wave Modulations Used For Impact Damage Detection in Composite StructuresDocument7 pagesAnalysis of Nonlinear Vibro-Acoustic Wave Modulations Used For Impact Damage Detection in Composite StructuresferdincaninNo ratings yet
- Electrical Measurements: Considerations On The Performance of 2 - and 4-Contact SystemsDocument12 pagesElectrical Measurements: Considerations On The Performance of 2 - and 4-Contact Systemsari_siNo ratings yet
- Ultramicroscopy: Tatsuya Ogawa, Shinkichi Kurachi, Masami Kageshima, Yoshitaka Naitoh, Yan Jun Li, Yasuhiro SugawaraDocument6 pagesUltramicroscopy: Tatsuya Ogawa, Shinkichi Kurachi, Masami Kageshima, Yoshitaka Naitoh, Yan Jun Li, Yasuhiro SugawaraMustafa CaglayanNo ratings yet
- The IRIS Damage Assessment Methodology: MotivationDocument18 pagesThe IRIS Damage Assessment Methodology: MotivationTONNo ratings yet
- Sherif1991 PDFDocument14 pagesSherif1991 PDFAnderson Steven Pena SabogalNo ratings yet
- H. Zhang Et Al - The Effect of Mechanical Deformation On Spiral TurbulenceDocument7 pagesH. Zhang Et Al - The Effect of Mechanical Deformation On Spiral TurbulenceGretymjNo ratings yet
- Analysis of Disruptive Instabilities in Aditya Tokamak DischargesDocument8 pagesAnalysis of Disruptive Instabilities in Aditya Tokamak DischargesNandhitha MuthuNo ratings yet
- The Relationship Between Mean Power Frequency of The EMG Spectrum and Muscle Fibre Conduction VelocityDocument5 pagesThe Relationship Between Mean Power Frequency of The EMG Spectrum and Muscle Fibre Conduction Velocityphuc21295No ratings yet
- Formal Report Lab 1Document11 pagesFormal Report Lab 1Mohan RyanNo ratings yet
- Amodificationof Plonseysformulaforbiomagnetism CVDocument25 pagesAmodificationof Plonseysformulaforbiomagnetism CVReza AditiyaNo ratings yet
- Damilano 1957Document7 pagesDamilano 1957guido_damilanoNo ratings yet
- Semion A. Vysotsky Et Al - Suppression of Spatio-Temporal Chaos in Simple Models of Re-Entrant FibrillationsDocument8 pagesSemion A. Vysotsky Et Al - Suppression of Spatio-Temporal Chaos in Simple Models of Re-Entrant FibrillationsGretymjNo ratings yet
- 5.in Simcenter STARDocument9 pages5.in Simcenter STARkather ahmedNo ratings yet
- Pumping Electrons: Condensed Matter PhysicsDocument4 pagesPumping Electrons: Condensed Matter PhysicsCristiano BruschiniNo ratings yet
- Kamlah-Etal Spie2001 4333Document7 pagesKamlah-Etal Spie2001 4333Mani PrakashNo ratings yet
- Non-Linear Analysis of Vibrations of Non-Linear System Subjected To Multi-Excitation Forces Via A Non-Linear AbsorberDocument9 pagesNon-Linear Analysis of Vibrations of Non-Linear System Subjected To Multi-Excitation Forces Via A Non-Linear AbsorberMac RodgeNo ratings yet
- Free Vibration Analysis of A DamDocument4 pagesFree Vibration Analysis of A Damvalerita89No ratings yet
- High-Speed Imaging of Dynamic Shock Wave Reflection PhenomenaDocument11 pagesHigh-Speed Imaging of Dynamic Shock Wave Reflection Phenomenaahajiali2005No ratings yet
- Electromagnetic Force ComputationDocument7 pagesElectromagnetic Force Computationyash_ganatraNo ratings yet
- An Electro Vibrocone For EvaluationDocument10 pagesAn Electro Vibrocone For EvaluationImmanuel LumbantobingNo ratings yet
- Concerning The Excitation of Electrical Waves Through Parameter Changes English Translation 1934Document27 pagesConcerning The Excitation of Electrical Waves Through Parameter Changes English Translation 1934zonetrekNo ratings yet
- MFL PPT NotesDocument3 pagesMFL PPT NotesGaurav ChopraNo ratings yet
- 1311 6589 PDFDocument30 pages1311 6589 PDFFabio CavaliereNo ratings yet
- Assignment Sheet 1 Mechanical Measurements and Instrumentation Due Date On or Before 16/09/2014 Problems Based On Chap 3 - DynamiccharactersticsDocument3 pagesAssignment Sheet 1 Mechanical Measurements and Instrumentation Due Date On or Before 16/09/2014 Problems Based On Chap 3 - DynamiccharactersticsJim HarrisNo ratings yet
- Resonant Column Last VersionDocument34 pagesResonant Column Last Versionkabasy2015No ratings yet
- Interpenetrating Plasma Shells: Near-Equipartition Magnetic Field Generation and Non-Thermal Particle AccelerationDocument6 pagesInterpenetrating Plasma Shells: Near-Equipartition Magnetic Field Generation and Non-Thermal Particle AccelerationEvin JoyNo ratings yet
- Jcam 2013Document8 pagesJcam 2013ebrahem_sahil5188No ratings yet
- Wave-Drift Damping of Floating BodiesDocument19 pagesWave-Drift Damping of Floating Bodiesvarek29No ratings yet
- Factor Afecting Shape IE Curves JCE 60 (1983) 285Document5 pagesFactor Afecting Shape IE Curves JCE 60 (1983) 285Gabriela Romero RomeroNo ratings yet
- Defense Technical Information Center Compilation Part NoticeDocument5 pagesDefense Technical Information Center Compilation Part Noticehmi1748951No ratings yet
- Secondary Flows and Turbulence For Staggered and Non-Staggered Electrode EmittersDocument16 pagesSecondary Flows and Turbulence For Staggered and Non-Staggered Electrode EmittersjayakrishnaNo ratings yet
- Effect of Current Flow - 1951Document10 pagesEffect of Current Flow - 1951Владимир ДружининNo ratings yet
- VL2 ReportDocument25 pagesVL2 ReportMatthew NelsonNo ratings yet
- Self-Excitation of Systems With Periodically Varying InductancesDocument6 pagesSelf-Excitation of Systems With Periodically Varying InductancesharishkumarsinghNo ratings yet
- Electromagnetic Support Arrangement With Threedimensional Control. Ii. ExperimentalDocument3 pagesElectromagnetic Support Arrangement With Threedimensional Control. Ii. Experimentalandres sanchezNo ratings yet
- FLC-MR Damper Control of Stay Cable Nonlinear Vibration: Skfali@civil - Iisc.ernet - inDocument6 pagesFLC-MR Damper Control of Stay Cable Nonlinear Vibration: Skfali@civil - Iisc.ernet - inShaikh Faruque AliNo ratings yet
- Eddy Magnetic LevitationDocument5 pagesEddy Magnetic LevitationRamesh NaiduNo ratings yet
- Experimental and Numerical Analysis of A Transducer For The Generation of Guided WavesDocument9 pagesExperimental and Numerical Analysis of A Transducer For The Generation of Guided Wavesdavood abbasiNo ratings yet
- Electromagnetic Synchronization of SlipDocument7 pagesElectromagnetic Synchronization of SlipOleg KharshiladzeNo ratings yet
- Omae2009 79793 2 PDFDocument10 pagesOmae2009 79793 2 PDFJohn AshlinNo ratings yet
- 02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersDocument14 pages02 Unit II Vibration Nomograph Vibration Control 04 02 2017 Student and TeachersKanishk Mehta100% (1)
- Zhoujian Cao Et Al - Turbulence Control With Local Pacing and Its Implication in Cardiac DefibrillationDocument9 pagesZhoujian Cao Et Al - Turbulence Control With Local Pacing and Its Implication in Cardiac DefibrillationGretymjNo ratings yet
- Timothy J. Lewis and Michael R. Guevara - Chaotic Dynamics in An Ionic Model of The Propagated Cardiac Action PotentialDocument26 pagesTimothy J. Lewis and Michael R. Guevara - Chaotic Dynamics in An Ionic Model of The Propagated Cardiac Action PotentialLuammmNo ratings yet
- Waterpurifier: Mobile Drinking Water Treatment SystemDocument4 pagesWaterpurifier: Mobile Drinking Water Treatment SystemSteveAbonyiNo ratings yet
- NEC Projector Lt265 ManualDocument145 pagesNEC Projector Lt265 ManualSteveAbonyiNo ratings yet
- Photovoltaic R&D in Germany: First-Class Research Partnerships Ensure A Sustainable EdgeDocument2 pagesPhotovoltaic R&D in Germany: First-Class Research Partnerships Ensure A Sustainable EdgeSteveAbonyiNo ratings yet
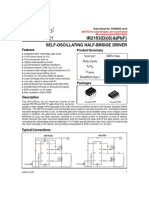
- Ir 2153Document9 pagesIr 2153SteveAbonyiNo ratings yet
- Force On An Asymmetric Capacitor (Antigravity Ufo, Army Report Arl-Tr-3005)Document38 pagesForce On An Asymmetric Capacitor (Antigravity Ufo, Army Report Arl-Tr-3005)SteveAbonyiNo ratings yet
- Terrawatt LaserDocument69 pagesTerrawatt LaserSteveAbonyiNo ratings yet
- Upower Analog 2Q08 Calpoly SM FinalDocument36 pagesUpower Analog 2Q08 Calpoly SM FinalSteveAbonyiNo ratings yet
- Superstrings TheoryDocument31 pagesSuperstrings TheorySteveAbonyiNo ratings yet
- H.A.W.System Vehicle H.A.W.System Vehicle: Hydrogen CarDocument2 pagesH.A.W.System Vehicle H.A.W.System Vehicle: Hydrogen CarSteveAbonyiNo ratings yet
- Recent Advancements of RF Guns: Luigi Faillace Radiabeam Technologies, Santa Monica CaDocument43 pagesRecent Advancements of RF Guns: Luigi Faillace Radiabeam Technologies, Santa Monica CaSteveAbonyiNo ratings yet
- Antigravity MetodeDocument25 pagesAntigravity MetodeSteveAbonyiNo ratings yet
- 0029 CaseDocument4 pages0029 CaseSteveAbonyiNo ratings yet
- TmaDocument3 pagesTmaSteveAbonyiNo ratings yet
- Tem 2Document3 pagesTem 2SteveAbonyiNo ratings yet
- Submitted By: Kathleen F. Cabatic Submitted To: Dr. Ramos: Dental SyringeDocument5 pagesSubmitted By: Kathleen F. Cabatic Submitted To: Dr. Ramos: Dental SyringeElizar ConstantinoNo ratings yet
- BT Bogies FLEXX PowerDocument4 pagesBT Bogies FLEXX PowerMarius-Ovidiu Ene100% (1)
- Gkindiaonline.comDocument19 pagesGkindiaonline.comVullnet Vuli IdriziNo ratings yet
- InterpolationDocument7 pagesInterpolationElianne GabbayNo ratings yet
- CSS Assignment 1 Q and ADocument9 pagesCSS Assignment 1 Q and AChinmay JoshiNo ratings yet
- FIrst Discoveries Workbook Unit 5Document6 pagesFIrst Discoveries Workbook Unit 5Felipe Herrera ZentenoNo ratings yet
- PathDocument8 pagesPathHamzaNo ratings yet
- 1682767499958249annual Report 2022-CompressedDocument131 pages1682767499958249annual Report 2022-Compresseddanke22No ratings yet
- Tut Hack WebDocument3 pagesTut Hack WebHoang NamNo ratings yet
- DSSE3000 / DSSE6000: Power and MoreDocument4 pagesDSSE3000 / DSSE6000: Power and MoreJuan CastroNo ratings yet
- Cereal Waste Management2Document14 pagesCereal Waste Management2daabgchi100% (1)
- Mo8 - Participate in TeamDocument77 pagesMo8 - Participate in TeamMikiyas FikirNo ratings yet
- Tamil Nadu Compulsory Marriage Registration Rules 2009Document53 pagesTamil Nadu Compulsory Marriage Registration Rules 2009Dr.Sagindar100% (6)
- 32) PP Vs CostalesDocument2 pages32) PP Vs CostalesErnsC100% (3)
- IU Group Assignment 2020 2021Document15 pagesIU Group Assignment 2020 2021Tran DoNo ratings yet
- Unit3 Images&GraphicsDocument23 pagesUnit3 Images&GraphicsNec'x RoseteNo ratings yet
- Cryo MiniDocument32 pagesCryo MiniRaul ZepedaNo ratings yet
- Diagnostic Manual: Scorpio VLX-non RefreshDocument24 pagesDiagnostic Manual: Scorpio VLX-non RefreshMarcelo MendozaNo ratings yet
- Method of Statement of CC1800 CraneDocument14 pagesMethod of Statement of CC1800 CraneABF ETSNo ratings yet
- CH 02 Principle of ManagementDocument18 pagesCH 02 Principle of ManagementBhunesh Kumar100% (1)
- 2004 Toyota Sienna 2018Document2 pages2004 Toyota Sienna 2018marioeduardocpNo ratings yet
- Polycom CX5100 Unified Conference Station: Data SheetDocument3 pagesPolycom CX5100 Unified Conference Station: Data SheetvariNo ratings yet
- DFI Gen 7 Plus InstructionsDocument159 pagesDFI Gen 7 Plus InstructionsGypsyR0% (1)
- Klaes 3D Alu ENDocument1 pageKlaes 3D Alu ENsurangaNo ratings yet
- Hey Kafe Franchise Proposal 2021Document15 pagesHey Kafe Franchise Proposal 2021mustafa achyarNo ratings yet
- Uspat 4203107 PDFDocument19 pagesUspat 4203107 PDFPaulo MoraisNo ratings yet
- Hanging Scaffolding Rev B-Layout1Document1 pageHanging Scaffolding Rev B-Layout1grantNo ratings yet
- Curriculum Vitae Haris Sya'BaniDocument2 pagesCurriculum Vitae Haris Sya'BaniHaris Sya’baniNo ratings yet
- Universal: Make NoDocument8 pagesUniversal: Make NoChinmaya BeheraNo ratings yet