Download as ppt, pdf, or txt
You might also like
- MCVG 61Document10 pagesMCVG 61Joel FigueroaNo ratings yet
- Stepper Motor Construction and Its FunctionsDocument25 pagesStepper Motor Construction and Its FunctionsIlakiya MaduraiNo ratings yet
- Software Phase Locked LoopDocument7 pagesSoftware Phase Locked LoopBinyam YohannesNo ratings yet
- Experiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsDocument6 pagesExperiment No: 1 Speed Control of DC Motor: Experimental Setup Containing The Following UnitsdeepakNo ratings yet
- Fast Automatic Sizing of A Charge Pump Phase-Locked Loop Based On Behavioral ModelsDocument22 pagesFast Automatic Sizing of A Charge Pump Phase-Locked Loop Based On Behavioral ModelsGc VeereshNo ratings yet
- Chapter 4 AC To AC Converters: OutlineDocument25 pagesChapter 4 AC To AC Converters: Outlinet1m0thyNo ratings yet
- Commissioning of DAVRDocument70 pagesCommissioning of DAVRPMG Bhuswal Project100% (1)
- FTF Aut f0234Document38 pagesFTF Aut f0234vishiwizardNo ratings yet
- CTRL Sys Lab ManualDocument46 pagesCTRL Sys Lab Manualabixek100% (2)
- Power Electronics 1: ENEL371S2Document17 pagesPower Electronics 1: ENEL371S2bpd21No ratings yet
- DC Motor Drives 2007Document48 pagesDC Motor Drives 2007stubborn002No ratings yet
- Module 3 HVDC System ControlDocument14 pagesModule 3 HVDC System ControlMohit SharmaNo ratings yet
- Repetitive ControlDocument22 pagesRepetitive ControlShri KulkarniNo ratings yet
- Exciter Basics BeDocument35 pagesExciter Basics Bemauriceblanco1100% (4)
- Chapter 4Document41 pagesChapter 4Anil ParmarNo ratings yet
- Lab Design and Analysis of Active CS and Cascode AmplifierDocument3 pagesLab Design and Analysis of Active CS and Cascode AmplifierAzure HereNo ratings yet
- Indirect Vector Control of Inductionmotor With Random Loading Using AnnDocument47 pagesIndirect Vector Control of Inductionmotor With Random Loading Using AnnMohan KrishnaNo ratings yet
- Electronic Measurement & Instrumentation Lab Lab Manual: Vi SemesterDocument41 pagesElectronic Measurement & Instrumentation Lab Lab Manual: Vi SemesterMy JaanNo ratings yet
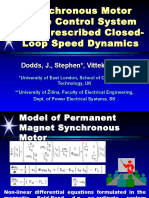
- Synchronous Motor Drive Control System With Prescribed Closed-Loop Speed DynamicsDocument20 pagesSynchronous Motor Drive Control System With Prescribed Closed-Loop Speed DynamicsVijay RajuNo ratings yet
- Ziegler 3490 SS Energy Meter With RS 485Document6 pagesZiegler 3490 SS Energy Meter With RS 485maheshNo ratings yet
- New CS ManualDocument68 pagesNew CS ManualmindsharpNo ratings yet
- Signals and SystemsDocument59 pagesSignals and SystemsArvind BhosaleNo ratings yet
- Chapter 1 Introduction Control SysDocument52 pagesChapter 1 Introduction Control SysHaliza MatsaniNo ratings yet
- Electric Utility Solutions: Voltage RegulationDocument88 pagesElectric Utility Solutions: Voltage RegulationMilsoft Utility Solutions50% (2)
- Project Report On OPDocument13 pagesProject Report On OPVarun PathaniaNo ratings yet
- Introduction To InvertersDocument27 pagesIntroduction To Invertersselaroth168No ratings yet
- Welcome: Electrical Machines Testing DepartmentDocument58 pagesWelcome: Electrical Machines Testing DepartmentMani KandanNo ratings yet
- Servo MotorDocument18 pagesServo MotorMinh HảiNo ratings yet
- Emi Lab Manual PDFDocument39 pagesEmi Lab Manual PDFMadhusudhanan RamaiahNo ratings yet
- 2 Pulse CircuitsDocument74 pages2 Pulse CircuitsWaqar Ahmad KhanNo ratings yet
- Control Lab NoteDocument19 pagesControl Lab NoteSK-062; 470; Afsana Anjum AkhiNo ratings yet
- Russ ElectricDocument105 pagesRuss ElectricTaner ErtürkNo ratings yet
- Modelling For System Studies: Power Research & Development Consultants PVT LTDDocument46 pagesModelling For System Studies: Power Research & Development Consultants PVT LTDRaja RamNo ratings yet
- Design Report Pss20Document46 pagesDesign Report Pss20Jaciel LMNo ratings yet
- AkhilsinghDocument13 pagesAkhilsinghalpha kumarNo ratings yet
- Lec 1 Introduction Frequencty ResponseDocument61 pagesLec 1 Introduction Frequencty ResponseAli AhmadNo ratings yet
- Analog Assignment FinalprintDocument20 pagesAnalog Assignment FinalprintAshish KumarNo ratings yet
- Sensors and ActuatorsDocument31 pagesSensors and ActuatorsDhiraj MahajanNo ratings yet
- 120EI0884 - SamyakHinge CSL Lab RecordDocument51 pages120EI0884 - SamyakHinge CSL Lab Recordpappu singhNo ratings yet
- Exp No 1Document9 pagesExp No 1arooj aslamNo ratings yet
- Prepared By: United Arab Emirates University College of Engineering Electrical Engineering DepartmentDocument87 pagesPrepared By: United Arab Emirates University College of Engineering Electrical Engineering DepartmentpadmajasivaNo ratings yet
- Fault Level Calculation - MethodsDocument46 pagesFault Level Calculation - MethodsPichumani100% (4)
- Mikro PFCR ExplanationDocument31 pagesMikro PFCR Explanationyschan30No ratings yet
- EC - Lab Manul With Viva Questions and AnswersDocument83 pagesEC - Lab Manul With Viva Questions and AnswerssunandaalurNo ratings yet
- Relays and C BDocument33 pagesRelays and C BRachit KhannaNo ratings yet
- F35 - Função 32GxDocument3 pagesF35 - Função 32GxLuís Barbieri100% (1)
- Chapter4 AnalogDocument48 pagesChapter4 AnalogOsman AtamNo ratings yet
- Voltage Control of InvertersDocument38 pagesVoltage Control of InvertersSindhujaSindhu100% (3)
- RISH EM 3490 DS - Digital Multifunctional Dual Source Energy MeterDocument8 pagesRISH EM 3490 DS - Digital Multifunctional Dual Source Energy MeterAarif Patel100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Introduction To Medical Informatics and Its ComponentsDocument18 pagesIntroduction To Medical Informatics and Its Componentsapi-247714257No ratings yet
- Lecture 3 ManagementDocument15 pagesLecture 3 Managementapi-247714257No ratings yet
- Lec1 P&ao 12bmeDocument20 pagesLec1 P&ao 12bmeapi-247714257No ratings yet
- Chapter 1Document16 pagesChapter 1api-247714257No ratings yet
- Data ProcessingDocument15 pagesData Processingapi-247714257No ratings yet
- Introduction To Social SciencesDocument26 pagesIntroduction To Social Sciencesapi-2477142570% (1)
- Lab 5 MsDocument2 pagesLab 5 Msapi-247714257No ratings yet
- Lec7 8Document27 pagesLec7 8api-247714257No ratings yet
- Lec3 4Document35 pagesLec3 4api-247714257No ratings yet
- Lec 07Document25 pagesLec 07api-247714257No ratings yet
- Competitions Rules FinalDocument8 pagesCompetitions Rules Finalapi-247714257No ratings yet
- Lab 4 MsDocument1 pageLab 4 Msapi-247714257No ratings yet
- Besal-2014 FormDocument1 pageBesal-2014 Formapi-247714257No ratings yet
- Lec 45Document73 pagesLec 45api-247714257No ratings yet
- Introduction To DSPDocument35 pagesIntroduction To DSPapi-247714257No ratings yet
- Received Frequency Display For Radio Receivers: 3025B-DIP42SDocument7 pagesReceived Frequency Display For Radio Receivers: 3025B-DIP42Saton1000No ratings yet
- Wrapper ClassesDocument4 pagesWrapper ClassesRoshineeNo ratings yet
- Odp NetDocument1,538 pagesOdp NetxuanjieshengNo ratings yet
- Material Safety Data Sheet: Section I: Identification of ProductDocument4 pagesMaterial Safety Data Sheet: Section I: Identification of ProductBarryNo ratings yet
- BDO CC REquirementsDocument21 pagesBDO CC REquirementsEdzmarie LaranjoNo ratings yet
- CE 428 Secondary ClarifierDocument5 pagesCE 428 Secondary ClarifierTiinaa GoncalvesNo ratings yet
- Green MarketingDocument11 pagesGreen MarketingSohan AhmedNo ratings yet
- Outline All Courses CCNDocument3 pagesOutline All Courses CCNAmir SohailNo ratings yet
- Optimizing Hot Gas DefrostDocument9 pagesOptimizing Hot Gas DefrostHoàngViệtAnhNo ratings yet
- Curriculum For Community Radio Training in NigeriaDocument30 pagesCurriculum For Community Radio Training in NigeriaHenry Anibe Agbonika I100% (1)
- NDA All Mcqs 2024Document4 pagesNDA All Mcqs 2024Shailesh PandeyNo ratings yet
- Arming The LuftwaffeDocument312 pagesArming The LuftwaffeHilel Cesar Chang100% (10)
- CPG FMCG Food Benchmark StudyDocument94 pagesCPG FMCG Food Benchmark StudySuhailNo ratings yet
- Design and Performance Estimation of Fir Filter Using Null Convention LogicDocument12 pagesDesign and Performance Estimation of Fir Filter Using Null Convention LogicavnishNo ratings yet
- E-10 Code (141/CA141) Oil Press. Sensor Low Error (LH Bank Only)Document150 pagesE-10 Code (141/CA141) Oil Press. Sensor Low Error (LH Bank Only)ЕгорNo ratings yet
- Vjti Academic DiaryDocument121 pagesVjti Academic DiaryDIPAK VINAYAK SHIRBHATENo ratings yet
- OPPO FinTech ContestDocument4 pagesOPPO FinTech ContestDevika MathurNo ratings yet
- Maersk Line Container Equipment Guide PDFDocument4 pagesMaersk Line Container Equipment Guide PDFfahrie_manNo ratings yet
- T5140 IlomDocument15 pagesT5140 IlomAkella Ramana KumarNo ratings yet
- Audit Risk Assessment Best PracticeDocument10 pagesAudit Risk Assessment Best PracticeEmily MauricioNo ratings yet
- Gogulski. CVDocument3 pagesGogulski. CVxmlaNo ratings yet
- IC200MDL930Document2 pagesIC200MDL930Sekhar Chandra MaddaliNo ratings yet
- HmetisDocument11 pagesHmetissriNo ratings yet
- 2 PDFDocument174 pages2 PDFRecordTrac - City of OaklandNo ratings yet
- Bleach Hts 7Document8 pagesBleach Hts 71br4h1m0v1cNo ratings yet
- Oracle Incomplete RecoveryDocument2 pagesOracle Incomplete RecoverySharathNo ratings yet
- Electrical Systems For Oil and GasDocument2 pagesElectrical Systems For Oil and GasAkinbode Sunday OluwagbengaNo ratings yet
- 4 Commencement Exercises & 6 Completion Rites (Script) : Cybergraduation of Signal Village National High SchoolDocument9 pages4 Commencement Exercises & 6 Completion Rites (Script) : Cybergraduation of Signal Village National High Schoolcombos comboNo ratings yet
- Anomaly Cards 0Document3 pagesAnomaly Cards 0Mandarini SilvaNo ratings yet
- PeopleSoft Doc UpdateDocument20 pagesPeopleSoft Doc UpdateupenderNo ratings yet