Download as pdf or txt
You might also like
- CISA Practice Questions IT GovernanceDocument4 pagesCISA Practice Questions IT GovernanceJoeFSabaterNo ratings yet
- Enterprise IT at CiscoDocument3 pagesEnterprise IT at CiscoroyalmechnoNo ratings yet
- CrowdStrike Falcon-Virtual Test Drive Guide PDFDocument27 pagesCrowdStrike Falcon-Virtual Test Drive Guide PDFifti71No ratings yet
- ASTM D 1176-2002 Prepararea Solutiilor de Antigel PDFDocument3 pagesASTM D 1176-2002 Prepararea Solutiilor de Antigel PDFCorina StanculescuNo ratings yet
- Power System StabilityDocument9 pagesPower System StabilityMyScribdddNo ratings yet
- Been Maintained or Lost Will Remain Stable Once Disturbance Is RemovedDocument3 pagesBeen Maintained or Lost Will Remain Stable Once Disturbance Is Removedez55No ratings yet
- Run-Time Monitoring Real-Time SystemsDocument10 pagesRun-Time Monitoring Real-Time SystemsArvind DhakaNo ratings yet
- Analytical Tools For Power System RestorationDocument7 pagesAnalytical Tools For Power System Restorationeorea1341No ratings yet
- 3A Feedback EDFDocument12 pages3A Feedback EDFShubh ShankarNo ratings yet
- A Design Methodology For Distributed Control Systems To Optimize Performance in The Presence of Time DelaysDocument28 pagesA Design Methodology For Distributed Control Systems To Optimize Performance in The Presence of Time Delaysrajayu20002724No ratings yet
- Stability Analysis of Digital Repetitive Control Systems Under Time-Varying Sampling PeriodDocument9 pagesStability Analysis of Digital Repetitive Control Systems Under Time-Varying Sampling PeriodAyman IsmailNo ratings yet
- Electrical Engineering and Computer Science DepartmentDocument45 pagesElectrical Engineering and Computer Science Departmenteecs.northwestern.eduNo ratings yet
- Gaussian Process-Based Predictive ControDocument12 pagesGaussian Process-Based Predictive ContronhatvpNo ratings yet
- Robust Control/scheduling Co-Design: Application To Robot ControlDocument10 pagesRobust Control/scheduling Co-Design: Application To Robot ControlronaldputeraNo ratings yet
- Artificial Neural Networks For The Performance Prediction of Large SolarDocument8 pagesArtificial Neural Networks For The Performance Prediction of Large SolarGiuseppeNo ratings yet
- Automatic Symbolic Verification of Embedded SystemsDocument37 pagesAutomatic Symbolic Verification of Embedded SystemsmonisivaNo ratings yet
- Identification of Dynamic Equivalents Based On Heuristic Optimization For Smart Grid Applications2012Document8 pagesIdentification of Dynamic Equivalents Based On Heuristic Optimization For Smart Grid Applications2012gabriveragNo ratings yet
- Components in Real-Time SystemsDocument12 pagesComponents in Real-Time SystemsSupervis0rNo ratings yet
- Optimal Tracking Control of Motion SystemsDocument11 pagesOptimal Tracking Control of Motion Systemsmousa bagherpourjahromiNo ratings yet
- STC 107Document19 pagesSTC 107Emmanuel Ore MartinezNo ratings yet
- Robust Control IssuesDocument61 pagesRobust Control IssuesinnoodiraNo ratings yet
- Jfi PDFDocument19 pagesJfi PDFMojtaba TabatabaeipourNo ratings yet
- Fault Estimation For Discrete-Time Switched Nonlinear Systems With Discrete and Distributed DelaysDocument17 pagesFault Estimation For Discrete-Time Switched Nonlinear Systems With Discrete and Distributed DelaysBALASUBRAMANI MNo ratings yet
- Robust Event-Driven Dynamic Simulation Using Power Flow: Aayushya Agarwal, Amritanshu Pandey, Larry PileggiDocument7 pagesRobust Event-Driven Dynamic Simulation Using Power Flow: Aayushya Agarwal, Amritanshu Pandey, Larry PileggiM8ow6fNo ratings yet
- Lab Ball Bearing 3Document10 pagesLab Ball Bearing 3hakansangulNo ratings yet
- Automatic Symbolic Verification Embedded Systems: Rajeev Alur, Thomas A. Henzinger, and Pei-Hsin HoDocument21 pagesAutomatic Symbolic Verification Embedded Systems: Rajeev Alur, Thomas A. Henzinger, and Pei-Hsin Ho3lok 3lNo ratings yet
- Model-Based Adaptive Critic Designs: Editor's SummaryDocument31 pagesModel-Based Adaptive Critic Designs: Editor's SummaryioncopaeNo ratings yet
- Articulo An Introduction To Event-Based Control For Networked Control SystemsDocument6 pagesArticulo An Introduction To Event-Based Control For Networked Control SystemsPaulina MarquezNo ratings yet
- Ijetae 0812 07Document9 pagesIjetae 0812 07Sahitya16No ratings yet
- 15.10 Off-Line DSA: 2006 by Taylor & Francis Group, LLCDocument4 pages15.10 Off-Line DSA: 2006 by Taylor & Francis Group, LLCfirst lastNo ratings yet
- Adaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeDocument18 pagesAdaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeLittle ChickNo ratings yet
- CaseStudy 5619 Content Document 20231114111059AMDocument5 pagesCaseStudy 5619 Content Document 20231114111059AMGaurav TripathiNo ratings yet
- A Novel Reaching Law For Sliding Mode Control of Uncertain Discrete-Time SystemsDocument1 pageA Novel Reaching Law For Sliding Mode Control of Uncertain Discrete-Time SystemsAshok GeorgeNo ratings yet
- Prediction of Critical Clearing Time Using Artificial Neural NetworkDocument5 pagesPrediction of Critical Clearing Time Using Artificial Neural NetworkSaddam HussainNo ratings yet
- 1 s2.0 S0019057816303974 MainDocument11 pages1 s2.0 S0019057816303974 Mainissa01No ratings yet
- Improving The Robustness of Mechatronic SystemsDocument16 pagesImproving The Robustness of Mechatronic SystemsHoa Binh TranNo ratings yet
- Response Based Emergency Control System For Power System Transient StabilityDocument13 pagesResponse Based Emergency Control System For Power System Transient Stabilityrasim_m1146No ratings yet
- Luis A. Montestruque, P. J. Antsaklis 2002 MODEL-BASED NETWORKED CONTROL SYSTEMS StabilityDocument58 pagesLuis A. Montestruque, P. J. Antsaklis 2002 MODEL-BASED NETWORKED CONTROL SYSTEMS StabilityFelix GamarraNo ratings yet
- Preventive Control Stability Via Neural Network SensitivityDocument8 pagesPreventive Control Stability Via Neural Network SensitivityrogeriojuruaiaNo ratings yet
- (Ortega2001) Putting Energy Back in ControlDocument16 pages(Ortega2001) Putting Energy Back in ControlFernando LoteroNo ratings yet
- Article 2Document20 pagesArticle 2hafiddjouadi36No ratings yet
- Observer-Based Event-Triggered Sliding Mode Control For UncertainDocument30 pagesObserver-Based Event-Triggered Sliding Mode Control For UncertainAbid WalidNo ratings yet
- Constraintoptimal Control For GyroscopeDocument7 pagesConstraintoptimal Control For GyroscopeInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Dynamic Considerations in The Synthesis of Self-Optimizing Control StructuresDocument12 pagesDynamic Considerations in The Synthesis of Self-Optimizing Control StructuresHari Madhavan Krishna KumarNo ratings yet
- A Simple Event-Based PID Controller: Årzén, Karl-ErikDocument7 pagesA Simple Event-Based PID Controller: Årzén, Karl-ErikedroalNo ratings yet
- Energy and Buildings: Brian Coffey, Fariborz Haghighat, Edward Morofsky, Edward KutrowskiDocument9 pagesEnergy and Buildings: Brian Coffey, Fariborz Haghighat, Edward Morofsky, Edward KutrowskiyalllikNo ratings yet
- Continuum Adapative ControlDocument14 pagesContinuum Adapative Controlabdelhamid.ghoul93No ratings yet
- A Proposal On PlantwideDocument5 pagesA Proposal On PlantwidesegunjuNo ratings yet
- Autonomous Power SystemDocument14 pagesAutonomous Power SystemgagagagNo ratings yet
- Controller Design ThesisDocument4 pagesController Design Thesisaprilgriffinbeaumont100% (2)
- 2011 Garcia Vilas Santos Alonso JJPC BWDocument50 pages2011 Garcia Vilas Santos Alonso JJPC BWCristian CanazaNo ratings yet
- An Improved Methodology For The Design of Power System Damping ControllersDocument8 pagesAn Improved Methodology For The Design of Power System Damping ControllersFernando RamosNo ratings yet
- System Identification and Modeling For Interacting and Non-Interacting Tank Systems Using Intelligent TechniquesDocument15 pagesSystem Identification and Modeling For Interacting and Non-Interacting Tank Systems Using Intelligent TechniquesMandy DiazNo ratings yet
- Nonlinear Analysis: Hybrid Systems: Liewei Wang, Cristian Mahulea, Jorge Júlvez, Manuel SilvaDocument16 pagesNonlinear Analysis: Hybrid Systems: Liewei Wang, Cristian Mahulea, Jorge Júlvez, Manuel SilvaHadyan Gilang KurniaNo ratings yet
- Sigmetrics08 Control PDFDocument31 pagesSigmetrics08 Control PDFyalllikNo ratings yet
- Applied Sciences: A Hybrid Degradation Modeling and Prognostic Method For The Multi-Modal SystemDocument21 pagesApplied Sciences: A Hybrid Degradation Modeling and Prognostic Method For The Multi-Modal SystemsdfsdghNo ratings yet
- Power FactoryDocument9 pagesPower Factorypmahesh268No ratings yet
- Bris Et Al. - 2003 - New Method To Minimize The Preventive MaintenanceDocument9 pagesBris Et Al. - 2003 - New Method To Minimize The Preventive MaintenanceMilagros ChampiNo ratings yet
- Feature MapDocument9 pagesFeature Map이성군No ratings yet
- Extending Rt-Minix With Fault Tolerance Capabilities: Pablo J. RoginaDocument8 pagesExtending Rt-Minix With Fault Tolerance Capabilities: Pablo J. RoginaGWNo ratings yet
- PlantWIde McAvoyDocument19 pagesPlantWIde McAvoydesigat4122No ratings yet
- Blanke, M. y Frei, CDocument12 pagesBlanke, M. y Frei, CRoberto DGNo ratings yet
- Modern Anti-windup Synthesis: Control Augmentation for Actuator SaturationFrom EverandModern Anti-windup Synthesis: Control Augmentation for Actuator SaturationRating: 5 out of 5 stars5/5 (1)
- 4824 Kimbrell-4824 TherrienDocument25 pages4824 Kimbrell-4824 TherrienzazaNo ratings yet
- PEP Onshore PipelineDocument76 pagesPEP Onshore PipelineYudha MaulanaNo ratings yet
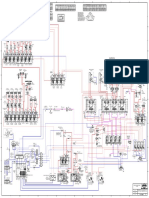
- F125-3829 Hydraulic DiagramDocument3 pagesF125-3829 Hydraulic DiagramhacknoteNo ratings yet
- 3.Bsc Maths SyllabusDocument65 pages3.Bsc Maths SyllabusBrindaThankaswamyNo ratings yet
- CA 7 Complete CommandsDocument664 pagesCA 7 Complete CommandsVIKAS bissaNo ratings yet
- Industries in ChakanDocument3 pagesIndustries in ChakanMayu SKNo ratings yet
- Electro Beam Lithography and X Ray LithographyDocument4 pagesElectro Beam Lithography and X Ray LithographyRia Rushin JosephNo ratings yet
- Cat Reman Products For Truck EnginesDocument12 pagesCat Reman Products For Truck Enginesmdnc1985100% (1)
- 1828 1Document16 pages1828 1Hamid NaveedNo ratings yet
- Discover Media PQ Gen.2 April - 2018 - enDocument5 pagesDiscover Media PQ Gen.2 April - 2018 - enMir MihailescuNo ratings yet
- FSS TCCDocument2 pagesFSS TCCEko ParjonoNo ratings yet
- Geronimo Z. Velasco - IOMDocument4 pagesGeronimo Z. Velasco - IOMGazelle Joy UlalanNo ratings yet
- El DWG 016 Grounding LayoutDocument1 pageEl DWG 016 Grounding LayoutSumit TyagiNo ratings yet
- Ilnas-En 12390-1:2021Document8 pagesIlnas-En 12390-1:2021HaniAminNo ratings yet
- NZS 3101-2006 PT-SL Example 001Document6 pagesNZS 3101-2006 PT-SL Example 001Fredy Sandro Rosas FloresNo ratings yet
- Gas Insulated Substation (GIS) Versus Air Insulated Substation (AIS) - EEP PDFDocument8 pagesGas Insulated Substation (GIS) Versus Air Insulated Substation (AIS) - EEP PDFAnonymous oZdAPQdIJNo ratings yet
- 3900 Prepreg System: Mechanically Stable Readily AvailableDocument7 pages3900 Prepreg System: Mechanically Stable Readily AvailableChiranthanRameshNo ratings yet
- Java Advanced Imaging API Home PageDocument3 pagesJava Advanced Imaging API Home PageJihad NehmeNo ratings yet
- WAC - PFL ID - Traffic Sharing U900-U2100Document30 pagesWAC - PFL ID - Traffic Sharing U900-U2100Aruna FermadiNo ratings yet
- Aiptek CamcorderDocument36 pagesAiptek CamcorderIsaac Musiwa BandaNo ratings yet
- Epson Stylus Pro 7700 - 7710 - 7900 - 7910 - 9700 - 9710 - 9900 - WT7900 - WT7910 - 9910 - 9890 - 9908 - 7890 - 7908Document519 pagesEpson Stylus Pro 7700 - 7710 - 7900 - 7910 - 9700 - 9710 - 9900 - WT7900 - WT7910 - 9910 - 9890 - 9908 - 7890 - 7908Robert SaumellNo ratings yet
- (cm3) (MM) (MM) (KG) (°C) : Compressor ApplicationDocument3 pages(cm3) (MM) (MM) (KG) (°C) : Compressor ApplicationAmira Ben AmaraNo ratings yet
- Different Types of ShipDocument6 pagesDifferent Types of ShipJason DiCaprioNo ratings yet
- ScienceDocument67 pagesScienceAMIN BUHARI ABDUL KHADERNo ratings yet
- 467-NR PartD 2022-07Document595 pages467-NR PartD 2022-07reza.shahisavandi01No ratings yet
- PHEONWJ-M-SPE-0021 1 Piping Fabrication & InstallationDocument22 pagesPHEONWJ-M-SPE-0021 1 Piping Fabrication & InstallationIksan Adityo Mulyo100% (1)