Download as pdf or txt
You might also like
- Cat 140H Wiring Diagram ColDocument10 pagesCat 140H Wiring Diagram Coldominicparramore78% (9)
- DC Motor Speed Control Methods Using MATLAB - Simulink and Their Integration Into Undergraduate Electric Machinery CoursesDocument9 pagesDC Motor Speed Control Methods Using MATLAB - Simulink and Their Integration Into Undergraduate Electric Machinery CoursesWen ZJNo ratings yet
- FinalYearProject-DC Motor Speed Control PIC16F877ADocument57 pagesFinalYearProject-DC Motor Speed Control PIC16F877ACata83% (6)
- Operating Principle of A Weigh FeederDocument1 pageOperating Principle of A Weigh FeederVijay Bhan60% (5)
- Instruction Manual: Mark 21 Dissolved OxygenDocument30 pagesInstruction Manual: Mark 21 Dissolved Oxygenscribd birdNo ratings yet
- 19 Speed PDFDocument8 pages19 Speed PDFNur Muhammad DzikriNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Ijert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariDocument4 pagesIjert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariAvinash Babu KmNo ratings yet
- Simulation of Closed Loop Control of Buck Converter Fed DC Motor DriveDocument4 pagesSimulation of Closed Loop Control of Buck Converter Fed DC Motor DriveIJSTENo ratings yet
- Microcontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwareDocument7 pagesMicrocontroller Based Constant Speed Low Cost Energy Efficient BLDC Motor Drive Using Proteus VSM SoftwaremakroumNo ratings yet
- Sliding Mode Observer For Torque Control in Sensorless BLDC MotorDocument5 pagesSliding Mode Observer For Torque Control in Sensorless BLDC MotorIOSRjournalNo ratings yet
- 08 July 2013Document5 pages08 July 2013IJBSTRNo ratings yet
- Field Current Speed Control of Direct Current Motor Using Fuzzy Logic TechniqueDocument6 pagesField Current Speed Control of Direct Current Motor Using Fuzzy Logic TechniqueEbie GhusaebiNo ratings yet
- Direct Torque Control of Induction MotorsDocument6 pagesDirect Torque Control of Induction MotorsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Speed Control of DC Motor Under Varying Load Using PID ControllerDocument11 pagesSpeed Control of DC Motor Under Varying Load Using PID ControllerAI Coordinator - CSC Journals100% (1)
- Abstract 1Document14 pagesAbstract 1Shivam VermaNo ratings yet
- Speed Control of Three Phase Induction MotorDocument8 pagesSpeed Control of Three Phase Induction MotorsasNo ratings yet
- DESIGNING THE PROPORTIONAL (P) AND PROPORTIONAL-INTEGRAL (PI) CONTROLLERS Control SystemDocument7 pagesDESIGNING THE PROPORTIONAL (P) AND PROPORTIONAL-INTEGRAL (PI) CONTROLLERS Control SystemjayxcellNo ratings yet
- Speed Control of Single Phase Induction Motor Using AC Chopper by Asymmetrical PWM TechniqueDocument6 pagesSpeed Control of Single Phase Induction Motor Using AC Chopper by Asymmetrical PWM TechniqueGRD Journals100% (2)
- Model Reference Controlled Separately Excited DC Motor: Ó Springer-Verlag London Limited 2009Document9 pagesModel Reference Controlled Separately Excited DC Motor: Ó Springer-Verlag London Limited 2009Na ChNo ratings yet
- International Journal of Instrumentation and Control Systems (IJICS)Document13 pagesInternational Journal of Instrumentation and Control Systems (IJICS)ijicsjournalNo ratings yet
- Closed Loop Speed and Position Control of DC MotorsDocument7 pagesClosed Loop Speed and Position Control of DC Motorslizhi0007No ratings yet
- Speed Control of Brushless DC Motor Using Fuzzy Logic ControllerDocument9 pagesSpeed Control of Brushless DC Motor Using Fuzzy Logic ControllerIOSRjournalNo ratings yet
- DSP Based Real Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP Based Real Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992No ratings yet
- A Technical Seminar Report On: P.Neeharika (08B21A02B5)Document9 pagesA Technical Seminar Report On: P.Neeharika (08B21A02B5)srinivas0276No ratings yet
- Speed Control of Induction Motor by Using Cyclo-ConverterDocument5 pagesSpeed Control of Induction Motor by Using Cyclo-ConverterBiswajit ChangkakotyNo ratings yet
- Speed Control of D C MOTOR Using Chopper-1308Document7 pagesSpeed Control of D C MOTOR Using Chopper-1308Moon3pellNo ratings yet
- Paper SGSITS Motor InterfaceDocument5 pagesPaper SGSITS Motor InterfacenileshchaurasiaNo ratings yet
- Brushless DC Motor Speed Control System of The Walking Aids MachineDocument4 pagesBrushless DC Motor Speed Control System of The Walking Aids MachineAl-ShukaNo ratings yet
- Four - Quadrant Control SystemsDocument4 pagesFour - Quadrant Control SystemsRICHARDNo ratings yet
- Simulation of Novel Technique For DC Drive For Crane ApplicationDocument5 pagesSimulation of Novel Technique For DC Drive For Crane ApplicationKypa Meenendra Nath Reddy100% (1)
- Final Report Acs 12Document36 pagesFinal Report Acs 12Abhishek SinghNo ratings yet
- Speed Control of 2-Pole DC Motor Using PWM PROTEUS VSM 7.9 & AVR STUDIO (SOFTWARE)Document4 pagesSpeed Control of 2-Pole DC Motor Using PWM PROTEUS VSM 7.9 & AVR STUDIO (SOFTWARE)IJSTENo ratings yet
- Design and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452Document4 pagesDesign and Implementation of IGBT Based Single Phase AC Drive Using PIC 18F452lajosmol100% (1)
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNo ratings yet
- Modelling and Simulation Speed Control of DC Motor Using PSIMDocument9 pagesModelling and Simulation Speed Control of DC Motor Using PSIMمحمد العراقيNo ratings yet
- Ijetae 0812 25 PDFDocument10 pagesIjetae 0812 25 PDFvishiwizardNo ratings yet
- N EOM Project Report: Fuzzy-Pid ControllerDocument35 pagesN EOM Project Report: Fuzzy-Pid ControllerAnime XNo ratings yet
- Brushed DC Sensorless FeedbackDocument3 pagesBrushed DC Sensorless FeedbackHoon Miew JieNo ratings yet
- DSP Control of Stepper MotorDocument5 pagesDSP Control of Stepper MotorAhmedHyderMohdNo ratings yet
- Design and Implementation Speed Control System of PDFDocument8 pagesDesign and Implementation Speed Control System of PDFvince kafuaNo ratings yet
- Performance of A 4-Switch, 3-Phase Inverter Fed Induction Motor (IM) Drive SystemDocument5 pagesPerformance of A 4-Switch, 3-Phase Inverter Fed Induction Motor (IM) Drive SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Ijetae 1013 117Document9 pagesIjetae 1013 117rasim_m1146No ratings yet
- DC Motor Speed Control System - ED4400BDocument14 pagesDC Motor Speed Control System - ED4400BDanang Pradika Purnomo100% (1)
- Modelling and Simulation of DC-Motor Electric Drive Control System With Variable Moment of InertiaDocument6 pagesModelling and Simulation of DC-Motor Electric Drive Control System With Variable Moment of InertiaIDESNo ratings yet
- Matrix AdvantagesDocument14 pagesMatrix AdvantagesAdeline WinsterNo ratings yet
- Novel Method PMDC Motor Speed ControlDocument15 pagesNovel Method PMDC Motor Speed ControlTravis WoodNo ratings yet
- H BridgeDocument16 pagesH BridgeSkiron ThrasciusNo ratings yet
- 1#a Comparative Study of PI Fuzzy and ANN Controllers For Chopper Fed DC Drive With Embedded Systems ApproachDocument17 pages1#a Comparative Study of PI Fuzzy and ANN Controllers For Chopper Fed DC Drive With Embedded Systems ApproachalialibabaNo ratings yet
- Matlab-Simulink Controller DesignDocument4 pagesMatlab-Simulink Controller DesignMohamed SomaiNo ratings yet
- Archive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DriveDocument6 pagesArchive of SID: Performance Analysis of A Cost Effective 4-Switch 3-Phase Inverter Fed IM DrivePranav VyasNo ratings yet
- DC Series Motor ControlDocument12 pagesDC Series Motor Controldapparao100% (1)
- 4334-Article Text-26786-1-10-20190807Document15 pages4334-Article Text-26786-1-10-20190807anujNo ratings yet
- Sensorless Field OrientedDocument8 pagesSensorless Field Orientedmv1970No ratings yet
- Experiment No. 09 - Speed ControlDocument6 pagesExperiment No. 09 - Speed Controlabheetpethe.scoe.entcNo ratings yet
- Subject (UNREG08) - Sensorless Motor ControlDocument7 pagesSubject (UNREG08) - Sensorless Motor ControlsorrowarNo ratings yet
- Research To Study Variable Frequency Drive and Its Energy SavingsDocument4 pagesResearch To Study Variable Frequency Drive and Its Energy SavingsIjsrnet EditorialNo ratings yet
- 18 - Three Phase InductionDocument7 pages18 - Three Phase InductiondevchandarNo ratings yet
- Paper - 5 Noise MinimizationDocument5 pagesPaper - 5 Noise MinimizationLTE002No ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Introduction To The Subject Power System PlanningDocument4 pagesIntroduction To The Subject Power System PlanningSalman HabibNo ratings yet
- Problem Set 6Document2 pagesProblem Set 6Salman HabibNo ratings yet
- Lecture 24Document51 pagesLecture 24Salman HabibNo ratings yet
- 21 Solar Cells II PDFDocument18 pages21 Solar Cells II PDFSalman HabibNo ratings yet
- Lecture 31: Filtering Out Spam: April 12, 2013Document64 pagesLecture 31: Filtering Out Spam: April 12, 2013Salman HabibNo ratings yet
- Security Technology For Smart Grid Networks: Supervisor: Dr. Muhammad AliDocument11 pagesSecurity Technology For Smart Grid Networks: Supervisor: Dr. Muhammad AliSalman HabibNo ratings yet
- Lecture 16Document92 pagesLecture 16Salman HabibNo ratings yet
- Lecture 3Document38 pagesLecture 3Salman HabibNo ratings yet
- DC Motor With Speed and Current Closed Loops, Driven by eTPU On MCF523xDocument44 pagesDC Motor With Speed and Current Closed Loops, Driven by eTPU On MCF523xSalman HabibNo ratings yet
- Group Axioms and PropertiesDocument14 pagesGroup Axioms and PropertiesSalman HabibNo ratings yet
- Smart Grid 208866095Document2 pagesSmart Grid 208866095Arbër PacaraNo ratings yet
- T-79 5501 Slides 3Document19 pagesT-79 5501 Slides 3Salman HabibNo ratings yet
- High Sensitive Alcohol Sensor With Auto Car Ignition Disable FunctionDocument3 pagesHigh Sensitive Alcohol Sensor With Auto Car Ignition Disable FunctionGebremedhinNo ratings yet
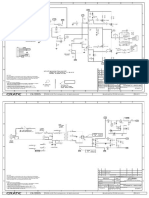
- Bass Amplifier PCB Schematics (473SCH - 0)Document2 pagesBass Amplifier PCB Schematics (473SCH - 0)Saurabh VaidyaNo ratings yet
- Fieldbusplug TDDocument36 pagesFieldbusplug TDsareluis30No ratings yet
- Clearaudio Basic Plus Manual en deDocument12 pagesClearaudio Basic Plus Manual en deJohn WalesNo ratings yet
- Fundamentals of Bus Protection HandoutsDocument13 pagesFundamentals of Bus Protection HandoutsMunesu Innocent DizamuhupeNo ratings yet
- Backlight: Light Source TypesDocument5 pagesBacklight: Light Source TypesQuin CusayNo ratings yet
- Datasheet CR0127838W21Document3 pagesDatasheet CR0127838W21Gerardo VillegasNo ratings yet
- A New Soft-Switching Configuration and Its Application in Transformerless Photovoltaic Grid-Connected InvertersDocument4 pagesA New Soft-Switching Configuration and Its Application in Transformerless Photovoltaic Grid-Connected InvertersBrightworld ProjectsNo ratings yet
- Voltage and Current UnbalanceDocument2 pagesVoltage and Current UnbalanceAbdulyunus AmirNo ratings yet
- Selection of Circuit BreakerDocument47 pagesSelection of Circuit Breakerconsultnadeem7050% (2)
- English Brochure Mico - FinalDocument32 pagesEnglish Brochure Mico - FinalMihir JainNo ratings yet
- Denison Hydraulics Directional Control Valve Cetop 03: Series 4D01 Design BDocument0 pagesDenison Hydraulics Directional Control Valve Cetop 03: Series 4D01 Design BZMCONTROLNo ratings yet
- Sound Enhancement Audio Processor: NJM2153MDocument6 pagesSound Enhancement Audio Processor: NJM2153MheruNo ratings yet
- Slua537 bq78pl114Document27 pagesSlua537 bq78pl114AlexNo ratings yet
- BJT MosfetDocument31 pagesBJT MosfetDheerLakhotiaNo ratings yet
- PDU For TMA Catalog (Add 3DT) - Add CEQ V3.0 - 001 PDFDocument3 pagesPDU For TMA Catalog (Add 3DT) - Add CEQ V3.0 - 001 PDFpandavision76No ratings yet
- SG125HV Datasheet PDFDocument2 pagesSG125HV Datasheet PDFluongttluongNo ratings yet
- Motion Controlled Robotic Arm Using Flex SensorsDocument5 pagesMotion Controlled Robotic Arm Using Flex SensorsNitin Somanathan0% (1)
- NCERT Solutions Physics Chapter 4 Moving Charges and MagnetismDocument9 pagesNCERT Solutions Physics Chapter 4 Moving Charges and MagnetismVidyakulNo ratings yet
- Laksh Gupta End Semester Project ReportDocument17 pagesLaksh Gupta End Semester Project ReportLaksh GuptaNo ratings yet
- Icne 2521 DDocument7 pagesIcne 2521 Dfraustro2No ratings yet
- Paper 15-A Review On Parameters Identification Methods For Asynchronous MotorDocument6 pagesPaper 15-A Review On Parameters Identification Methods For Asynchronous MotorAldemar GonzalezNo ratings yet
- Data Sheet: VPU AC II 3 R 300/50Document5 pagesData Sheet: VPU AC II 3 R 300/50TTIBCCANo ratings yet
- E8364 90026Document394 pagesE8364 90026Alessandro Defilippi EliasNo ratings yet
- PHD Thesis 2c Jonathan Hallinder 2c 2013.Document226 pagesPHD Thesis 2c Jonathan Hallinder 2c 2013.RahulNo ratings yet
- Eaton 107898 M22 CK20 en - GBDocument4 pagesEaton 107898 M22 CK20 en - GBAchafi Moussa MahamatNo ratings yet
- Raychem Medium Voltage Termination (HVT) : 5 KV - 35 KVDocument4 pagesRaychem Medium Voltage Termination (HVT) : 5 KV - 35 KVjuwinthir putra bengawanNo ratings yet