Download as pdf or txt
You might also like
- USS Flat Washer Size ChartDocument1 pageUSS Flat Washer Size ChartardserNo ratings yet
- Fundamental Parameter-Based X-Ray Fluorescence Analysis of Thin and Multilayer SamplesDocument13 pagesFundamental Parameter-Based X-Ray Fluorescence Analysis of Thin and Multilayer SamplesCarlos PalominoNo ratings yet
- Virtual Instrumentation For Bio-Medical ApplicationsDocument3 pagesVirtual Instrumentation For Bio-Medical Applicationssouvik5000No ratings yet
- 03 PresentationDocument38 pages03 Presentation18-QADEER AHMADNo ratings yet
- S&I unit3-1Document6 pagesS&I unit3-1singhanisha073No ratings yet
- 79 - 133 - Book ChapterDocument12 pages79 - 133 - Book ChaptersaravananNo ratings yet
- ASEE Robot Accuracy tx11 Robin Edit 2 PDFDocument13 pagesASEE Robot Accuracy tx11 Robin Edit 2 PDFTheiss GinaNo ratings yet
- IOT-Assignment 2 PDFDocument5 pagesIOT-Assignment 2 PDFQusai KHNo ratings yet
- Virtual Instrumentation Interface For SRRC Control System: The Is AsDocument3 pagesVirtual Instrumentation Interface For SRRC Control System: The Is AsJulio CésarNo ratings yet
- Secure Wireless Controller For Hand Held Remote Operation of Traffic Signals in Peak HoursDocument49 pagesSecure Wireless Controller For Hand Held Remote Operation of Traffic Signals in Peak HoursS SREENATHNo ratings yet
- Plant DocumentDocument21 pagesPlant DocumentKongu BhuvaneshNo ratings yet
- Work Traffic Monitoring Analysis SystemDocument14 pagesWork Traffic Monitoring Analysis SystemBurhan SikanderNo ratings yet
- ATT Component-Based Design For SCADA ArchitectureDocument7 pagesATT Component-Based Design For SCADA ArchitectureGarry19880100% (1)
- Crime Records Management System (Synopsis)Document12 pagesCrime Records Management System (Synopsis)sanjaykumarguptaa75% (4)
- Intelligent System Design of Microcontroller Based Real Time Process Control Trainer .Document12 pagesIntelligent System Design of Microcontroller Based Real Time Process Control Trainer .Kelvin NnamaniNo ratings yet
- IOT unit IIDocument9 pagesIOT unit IITejaswini PawarNo ratings yet
- Labview Based Three Phase Induction Motor Speed Control: 1 Literature SurveyDocument68 pagesLabview Based Three Phase Induction Motor Speed Control: 1 Literature Surveyhardikrananjay100% (1)
- A Real Time Embedded Finger Vein Recognition System For Authentication On Mobile DevicesDocument4 pagesA Real Time Embedded Finger Vein Recognition System For Authentication On Mobile DevicesRaghul RamasamyNo ratings yet
- Physical Design of Iot: Things/DeviceDocument23 pagesPhysical Design of Iot: Things/DeviceShashank chowdary DaripineniNo ratings yet
- Presented By:: Esha Aslam (19-CS-02) Nosheen Rasheed (19-CS-05) Qadeer Ahmad (19-CS-18) Rehman Yasin (19-CS-35)Document34 pagesPresented By:: Esha Aslam (19-CS-02) Nosheen Rasheed (19-CS-05) Qadeer Ahmad (19-CS-18) Rehman Yasin (19-CS-35)18-QADEER AHMADNo ratings yet
- HPCL TenderDocument17 pagesHPCL TenderDeepak146No ratings yet
- Intelligent Traffic Light ControlDocument8 pagesIntelligent Traffic Light ControlPavan Murali ManoharaNo ratings yet
- VirtualInstrumentation ArticleDocument22 pagesVirtualInstrumentation ArticleSumit MauryaNo ratings yet
- Conference PaperDocument10 pagesConference PaperJ.MARIETTA JOHNSONNo ratings yet
- CNC Data Acquisition: System Development and ValidationDocument4 pagesCNC Data Acquisition: System Development and ValidationjamilvoraNo ratings yet
- DOQ-Dimel-009 (EN)Document20 pagesDOQ-Dimel-009 (EN)Eliton JuniorNo ratings yet
- Scada PaperDocument6 pagesScada PaperhafizgNo ratings yet
- Accurate Activity Recognition in A Home SettingDocument9 pagesAccurate Activity Recognition in A Home SettingmounamalarNo ratings yet
- PCBI - WholeDocument10 pagesPCBI - WholeSucharitha PathipatiNo ratings yet
- Finger Print Based Electronic Voting MachineDocument93 pagesFinger Print Based Electronic Voting Machinehar420100% (1)
- Embedded Operating Systems For Real-Time Applications: AbstractDocument14 pagesEmbedded Operating Systems For Real-Time Applications: AbstractKunal KucheriaNo ratings yet
- Detection of Cyber Attacks Using AiDocument92 pagesDetection of Cyber Attacks Using Airamesh reddyNo ratings yet
- Radio Frequency Identification and Fingerprint Based Student Attendance SystemDocument3 pagesRadio Frequency Identification and Fingerprint Based Student Attendance System27051977No ratings yet
- Electronic Toll Collection Sysem Based On RfidDocument68 pagesElectronic Toll Collection Sysem Based On RfidUmar Rahamatullah ShareefNo ratings yet
- Mechatronics Module 3 - Yajnesha P ShettigarDocument21 pagesMechatronics Module 3 - Yajnesha P ShettigarSubaita JahagirdarNo ratings yet
- Debugging Mode in A Fault Injection Systemdebugging Mode in A Fault Injection SystemDocument1 pageDebugging Mode in A Fault Injection Systemdebugging Mode in A Fault Injection SystemArul AnandhamNo ratings yet
- MIS AssignmentDocument7 pagesMIS AssignmentSHREYA GARGNo ratings yet
- Iot Automation Journal Paper FinalDocument9 pagesIot Automation Journal Paper FinalNagarajanNo ratings yet
- Here Are Five Different Types of Industry-Recognized Network Tools For Maintaining High-Security NetworksDocument19 pagesHere Are Five Different Types of Industry-Recognized Network Tools For Maintaining High-Security NetworksRameshNo ratings yet
- Abstract - An Automatic Parking System Miniature Model Design and Implementation IsDocument8 pagesAbstract - An Automatic Parking System Miniature Model Design and Implementation IsHatake Galang UcihaNo ratings yet
- Embeded SystemDocument16 pagesEmbeded SystemEet's Marve RichyNo ratings yet
- Microcontroller Based Monitoring and Control of Fault Detection in Transmission Line Using Proteus SoftwareDocument7 pagesMicrocontroller Based Monitoring and Control of Fault Detection in Transmission Line Using Proteus Softwaremb140400134 Maryam Dilawar HussainNo ratings yet
- MIT2017 - Research and Science Today Supplement No. 2/2017 Article 31Document7 pagesMIT2017 - Research and Science Today Supplement No. 2/2017 Article 31A DcNo ratings yet
- The Research and Development of Measurement Robot Automatic Monitoring SystemsDocument4 pagesThe Research and Development of Measurement Robot Automatic Monitoring SystemsInternational Journal of computational Engineering research (IJCER)No ratings yet
- m2m IotDocument13 pagesm2m Iotsurya putraNo ratings yet
- MatterDocument47 pagesMatterDevanand T SanthaNo ratings yet
- Micro Process or Based ControllersDocument6 pagesMicro Process or Based Controllerssivakrishna nadakuduruNo ratings yet
- Course FileDocument36 pagesCourse FileElakkiya N.SNo ratings yet
- 5 2marksDocument22 pages5 2marksElakkiya N.SNo ratings yet
- IR SensorDocument9 pagesIR SensorRrNo ratings yet
- Data Acquisition Using Android and Pic Micro-Controller: Shobha Waghmode & M. B. LimkarDocument6 pagesData Acquisition Using Android and Pic Micro-Controller: Shobha Waghmode & M. B. LimkarTJPRC PublicationsNo ratings yet
- A Review Paper: Embedded SecurityDocument4 pagesA Review Paper: Embedded SecurityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Safety Instrumented System (Sis) For Process Operation Based On Real - Time MonitoringDocument56 pagesSafety Instrumented System (Sis) For Process Operation Based On Real - Time MonitoringGCNo ratings yet
- Evm ProposalDocument5 pagesEvm ProposalShravan Kumar LuitelNo ratings yet
- Mini Project - 18CSC302J - COMPUTER NETWORKS: Team MembersDocument6 pagesMini Project - 18CSC302J - COMPUTER NETWORKS: Team MembersVijay RamrajNo ratings yet
- Design of On-Board Software For An Experimental SatelliteDocument10 pagesDesign of On-Board Software For An Experimental SatelliteAlex ParampampamNo ratings yet
- An Agent-Based Bayesian Forecasting Model For Enhanced Network SecurityDocument8 pagesAn Agent-Based Bayesian Forecasting Model For Enhanced Network SecurityDwi Amalia Purnama SariNo ratings yet
- Design and Implementation of Real-Time Robot Operating System Based On FreertosDocument7 pagesDesign and Implementation of Real-Time Robot Operating System Based On FreertosThiago Alberto Ramos GabrielNo ratings yet
- IOT For Industrial AutomationDocument27 pagesIOT For Industrial AutomationSreya GrandhiNo ratings yet
- Smart Camera: Revolutionizing Visual Perception with Computer VisionFrom EverandSmart Camera: Revolutionizing Visual Perception with Computer VisionNo ratings yet
- Bronco Schematic Mud PumpsDocument1 pageBronco Schematic Mud PumpsardserNo ratings yet
- Bronco Schematic Drawworks PDFDocument1 pageBronco Schematic Drawworks PDFardserNo ratings yet
- Bronco Schematic Brake Systems PDFDocument1 pageBronco Schematic Brake Systems PDFardserNo ratings yet
- Instruction Manual Safety Principles, Operation and Maintenance For Travelling Chain BlocksDocument26 pagesInstruction Manual Safety Principles, Operation and Maintenance For Travelling Chain BlocksardserNo ratings yet
- Bronco Schematic DrawworksDocument1 pageBronco Schematic DrawworksardserNo ratings yet
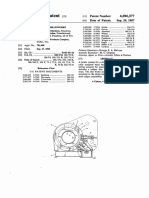
- Us4696377 PDFDocument9 pagesUs4696377 PDFardserNo ratings yet
- 2008 NHSTES Program WebDocument6 pages2008 NHSTES Program WebardserNo ratings yet
- InfoMant ProductSheet enDocument1 pageInfoMant ProductSheet enardserNo ratings yet
- Measurement and Analysis in The Well: Logging, Permits Real-Time Detection of The Presence ofDocument18 pagesMeasurement and Analysis in The Well: Logging, Permits Real-Time Detection of The Presence ofardserNo ratings yet
- Drilling Rig Components Illustration - Komponen Utama PemboranDocument86 pagesDrilling Rig Components Illustration - Komponen Utama PemboranPuji LestariNo ratings yet
- Kelly SpinnerDocument10 pagesKelly Spinnerardser100% (1)
- 5708ac8a280ba67b8efedbe40b7217fbDocument424 pages5708ac8a280ba67b8efedbe40b7217fbardserNo ratings yet
- Welcome To The VHDL LanguageDocument399 pagesWelcome To The VHDL LanguageardserNo ratings yet
- VHDL CompDocument46 pagesVHDL CompardserNo ratings yet
- Volume 2 Construction For Bore Well 2 Nos at IIM Indore2Document3 pagesVolume 2 Construction For Bore Well 2 Nos at IIM Indore2Abir SenguptaNo ratings yet
- Assignment of Motion Physics XI SINDHDocument3 pagesAssignment of Motion Physics XI SINDHKashif Ali MagsiNo ratings yet
- Golf Project ReportDocument12 pagesGolf Project ReportRaja Sekhar PNo ratings yet
- SubgradfDocument21 pagesSubgradfsharvan10No ratings yet
- PivotapiDocument35 pagesPivotapiscribd.resident588No ratings yet
- WintracManual PDFDocument98 pagesWintracManual PDFIvan Alberto PosadasNo ratings yet
- Driver Setup ManualDocument20 pagesDriver Setup Manualمقصود احمد انصاریNo ratings yet
- 40 Days Study Plan For IBPS ClerkDocument15 pages40 Days Study Plan For IBPS ClerkRavi PrakashNo ratings yet
- Microwave Heating 5 8 GHZDocument5 pagesMicrowave Heating 5 8 GHZperejferrerNo ratings yet
- Step by Step 1 PDFDocument164 pagesStep by Step 1 PDFMohamed Ali100% (1)
- Exam C - TS4CO - 1709: IT Certification Guaranteed, The Easy Way!Document19 pagesExam C - TS4CO - 1709: IT Certification Guaranteed, The Easy Way!ashok SapsdNo ratings yet
- C Programming - Notes-1Document40 pagesC Programming - Notes-1Sumit NirmalNo ratings yet
- RLV's Re-Entry Trajectory Optimization Based On B-Spline TheoryDocument5 pagesRLV's Re-Entry Trajectory Optimization Based On B-Spline TheoryShubham KaduNo ratings yet
- Cantilever SlabDocument3 pagesCantilever SlabMatumbi NaitoNo ratings yet
- NIH Public Access: Fusion Protein Linkers: Property, Design and FunctionalityDocument32 pagesNIH Public Access: Fusion Protein Linkers: Property, Design and FunctionalityDeepak KumarNo ratings yet
- B 121 101 (Cb-11a-33 (3a) (3C) (3Q) )Document1 pageB 121 101 (Cb-11a-33 (3a) (3C) (3Q) )sasidharreddyNo ratings yet
- Deformation of Solids 24Document43 pagesDeformation of Solids 24hijabNo ratings yet
- Design, Implementation and Verification of 32-Bit ALU With VIODocument6 pagesDesign, Implementation and Verification of 32-Bit ALU With VIONubia DiazNo ratings yet
- Mono T7Document1 pageMono T7Syamala KNo ratings yet
- SVC Mirror FinalDocument19 pagesSVC Mirror Finalpisko1979No ratings yet
- Miscellaneous Practice 4Document3 pagesMiscellaneous Practice 4Bryan Fury100% (2)
- 2020 Ignite K3 Set Up GuideDocument30 pages2020 Ignite K3 Set Up GuidedjeisnerNo ratings yet
- Electric Vehicles Standards Charging InfDocument27 pagesElectric Vehicles Standards Charging InfPedrito OrangeNo ratings yet
- Ex8G Q9Document2 pagesEx8G Q9AlfredNo ratings yet
- Theory of Machine AssignmentDocument3 pagesTheory of Machine AssignmentshehzadNo ratings yet
- Matter-Nature and Behaviour (Conceptual Questions With Very Short Answers)Document4 pagesMatter-Nature and Behaviour (Conceptual Questions With Very Short Answers)Syed Mazhar AliNo ratings yet
- 6FX5002-2DC00-1AJ0 Datasheet enDocument2 pages6FX5002-2DC00-1AJ0 Datasheet enyanti yanzNo ratings yet
- Audit DashboardDocument4 pagesAudit Dashboardhajar bourouihiyaNo ratings yet
- Basic Principles in Formworks Design-ACELDocument44 pagesBasic Principles in Formworks Design-ACELronelyn bernalNo ratings yet