Professional Documents
Culture Documents
FEM Full
FEM Full
Uploaded by
Harish LambadiOriginal Description:
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
FEM Full
FEM Full
Uploaded by
Harish LambadiCopyright:
Available Formats
Finite Element Analysis
by
Prof. N Siva Prasad
Department of Mechanical Engineering
Indian Institute of Technology Madras
2
STRESSES AND EQULIBRIUM
Fig. 1 Three-dimensional body
A three-dimensional body occupying a volume V and having a surface S is
shownin Fig.1.
The deformation of a point is given by the three components of its
displacement:
T
=[ ] u,v,w u
(1)
T
( =[x, y,z] ) x
3
The distributed force per unit volume, for example, the weight per unit
volume, is the vector f given by
T
[ ]
x y
f , f , f = f
z
(2)
The body force acting on the elemental volume dV is shownin Fig.1
The surface tractionT maybe given by
T
]
x y z
T ,T ,T T =[
(3)
Aload P actingat a point i is representedby its three components:
T
i i
[ ]
x y z
P , P , P = P
(4)
4
The stresses acting on the elemental volume dV are shows Fig. 2.
Fig. 2 Equilibrium of elemental volume
5
The six independent components are
T
x y yz xz xy
[ , , , , , ]
z
=
(5)
x y z
, ,
yz xz xy
, , ,
where are normal stresses and
are shear stresses. The equilibriumequations
0
0
0
xy
x xz
x
xy y yz
y
yz
xz z
z
f
x y z
f
x y z
f
x y z
+ + + =
+ + + =
+ + + =
(6a)
(6b)
(6c)
6
STRAIN DISPLACEMENT RELATIONS
T
[ , , , , , ]
x y z yz xz xy
=
(7)
, ,
x y
z
, ,
yz xz
xy
where and are normal strains and and
are the engineeringshear strains.
7
Fig. 3 Deformed elemental surface
Fig. 3shows the deformationof the face dx-dy.
8
The shear strain-displacement can be written as
xy
u v
y x
= +
(8)
Consideringthe other faces y-z, and z-x,
T
, , , , ,
u v w v w u w u v
x y z z y z x y x
(
= + + +
(
(9)
9
y
x z
x
y
x z
y
y
x z
z
v v
E E E
v v
E E E
v v
E E E
=
= +
= +
yz
yz
xz
xz
xy
xy
G
G
G
=
=
=
(10)
Stress-strain relations
For linear elastic materials, the stress-strain relations come from the
generalized Hookes law. For isotropic materials, the two material
properties are Youngs modulus (or modulus of elasticity) E and
Poissons ratio . Considering an elemental cube inside the body,
Hookes lawgives
v
10
The shear modulus (or modulus of rigidity), G is given by
2(1 )
E
G
v
=
+
(11)
From Hookes law relationships (Eqn. 10), adding and LHS
(1 2 )
( )
x y z x y z
v
E
+ + = + +
(12)
Substituting for and so on into Eq. 10, we get the inverse relations
D =
(13)
( ) x z +
11
D is the symmetric (6 X 6) material matrix given by
1 0 0 0
1 0 0 0
1 0 0 0
0 0 0 0.5 0 0 (1 )(1 2 )
0 0 0 0 0.5 0
0 0 0 0 0 0.5
v v v
v v v
v v v
E
v v v
v
v
(
(
(
(
=
(
+
(
(
D
(14)
(15)
12
=
Special cases
One dimension. In one dimension, we have normal stress along x and
the corresponding normal strain . Stress-strain relations (Eq. 13) are
simply
Two dimensions. In two dimensions, the problems are modeled as plane
stress and plane strain.
13
Fig. 4 (a) Plane stress
Plane Stress. A thin planar body subjected to in-plane loading on
its edge surface is said to be in plane stress. A ring press fitted on a
shaft, Fig. 4, is an example. Here stresses
are set as zero. The Hookes law relations (Eq. 10) then give us
, ,and
z xz yz
2(1 )
( )
x
y
xy
z
y
x
v
E E
y
x
v
E E
v
xy
E
v
x y
E
=
= +
+
=
= +
14
(16)
Fig. 4(b) plane strain
( )( )
1 0
1 0
1+ 1 2
0 0 0.5
v v
x x
E
v v
y y
v v
v
xy xy
(
(
(
` `
(
(
(
) )
(17)
D here is a (3x3) matrix.
Plane Strain.
If a long body of uniform cross section is subjected to transverse
loading along its length, are taken as zero. Stress
may not be zero in this case. The stress strain relations can be
obtained
, ,and
z xz yz
15
TEMPERATURE EFFECTS
The temperature strainis representedas an initial strain:
0
T
(
= , , , 0 ,0 ,0
(18)
16
The stress strain relations thenbecome
0
( ) = D
(19)
Inplane stress,
T
, , 0 T T
0
(
=
(20)
0
z
= ,
0
Inplane strain, the constraint that results in a different
( )
0
T
1 , , 0 v T T
(
= +
(21)
17
Potential Energy,
The total potential energy of an elastic body, is defined as the
sum of total strain energy (U) and the work potential:
= Strain energy+Work potential
(U) (WP) (22)
For linear elastic materials, the strain energy per unit volume in the body
is . For an elastic body, the total strain energy is given by
1
2
V
1
T
2
U dV =
(23)
The work potential WP is given by
18
V S
T T T
WP
i i
i
dV dS =
u f u T u P
(24)
The total potential for the general elastic body shownin Fig.1.1is
T
1
T T T
2
i i
i
V V S
dV dV dS =
u f u T u P
(25)
19
Principle of Minimum Potential Energy
For conservative systems, of all the kinematically admissible
displacement field, those corresponding to equilibrium extremize the
total potential energy. If the extremum condition is a minimum, the
equilibrium state is stable.
Kinematically admissible displacements are those that satisfy the
single-valued nature of displacements and the boundary conditions.
20
Example 1
Fig. 5 shows a system of springs. The total potential energy is given by
Fig. 5 System of springs
21
2 2 2 2
1 2 3 4 1 1 3 3 1 2 3 4
1 1 1 1
2 2 2 2
k k k k F q F q = + + +
(26)
where are extensions of the four springs. Since
1 2 3 4
, , , and
1 1 2 2 2 3 3 2 4 3
( ), , ( ), q q q q q and q = = = = substituting for i we can write as
( ) ( )
2
2 2
1 1 2 2 3 3 2 4 1 1 3 3 2 3
2
1 1 1 1
2 2 2 2
k q q k q k q q k q F q F q = + + +
(27)
where q
1
,q
2
,andq
3
are the displacements of nodes 1,2, and 3, respectively.
22
For equilibrium of this three degrees of freedom system, we need to
minimize with respect to q
1
, q
2
, and q
3
. The three equations are given
by
0 1,2,3 i
q
i
= =
(28)
whichare
0
1 1 2 1
1
0
1 1 2 2 2 3 3 2
2
0
3 3 2 4 3 3
3
k q q F
q
k q q k q k q q
q
k q q k q F
q
| |
|
\ .
| | | |
| |
\ . \ .
| |
|
\ .
= =
= + =
= + =
(29)
23
These equilibrium equations can be put in the form of matrix, Kq=F as
follows:
0
1 1 1 1
0
1 1 2 3 3 2
0
3
3 3 3 4
k k q F
k k k k k q
F
q k k k
(
(
(
(
` `
(
(
(
)
)
+ + =
+
(30)
24
X
P
2
P
1
f
T
Fig. 6
In one dimensional problems, the stress, strain, displacement, and
loadingdepends only on the variable x
ONE DIMENSIONAL PROBLEMS
One dimensional bar loaded by traction, body and point loads
25
( ) u x = u ( ) x = ( ) x = ( ) T x = T ( ) f x = f
The stress-strain and strain-displacement relations are
E =
du
dx
=
The loading consists of three types
- body force f
-traction force T
-point load Pi
26
( ) ( ) ( )
( ) ( )
u x x u x
T x f x
= = = u
T= f =
(31)
The stress - strainand strain- displacement relations are
du
E
dx
= = (32)
For one-dimensional problems, the differential volume dV canbe writtenas
dV =A dx (33)
For the one-dimensional problem, the stress, strain, displacement, and
loadingdependonly on the variable x.
27
Rayleigh-Ritz Method
For continua, the total potential energy in Eq.(1) can be used for finding
anapproximate solution.
1
2
T T T T
i i
i
V V V
dV u f dV u T dV u P =
(1)
The Rayleigh-Ritz method involves the construction of an assumed
displacement field, say,
( )
( )
( )
, , 1
, , 1
, , 1
i i
j j
k k
u a x y z i to
v a x y z j tom
w a x y z k m to
n m
= =
= = +
= = +
> >
(2)
28
The function
i
are usually taken as polynomials. Displacements u, v, w must
must be kinematically admissible. That is u, v, w must satisfy specified
boundary conditions. Introducing stress-strain and strain-displacement
relationinto Eq. (1).
( )
1 2
, ,......,
r
a a a =
(3)
where r =number of independent unknowns. Now, the extremumwith
respect to a
i
(i = 1 to r) yields the set of r equations
0 1,2,.......,
i
i r
a
= =
(4)
29
Example 1
The potential energy for the linear elastic one-dimensional rod (Fig.1),
with bodyforce neglected, is
2
1
0
1
2
2
L
du
EA dx u
dx
| |
=
|
\ .
where u
1
= u(x = 1).
Let us consider a polynomial function
u = a
1
+ a
2
x +a
3
x
2
This must satisfyu = 0 at x = 0 and u = 0 at x = 2. Thus
0 = a
1
0 = a
1
+2a
2
+4a
3
Hence,
a
2
= -2a
3
u = a
3
(-2x + x
2
) u
1
= -a
3
30
Fig.1
31
( ) ( )
2
2
2
3 3
0
1
4 1 2
2
a x dx a = +
( )
( )
2
2 2
3 3
0
2 1 2 2 a x x dx a = + +
2
3 3
2 2 a a = +
Thendu/dx = 2a
3
(-1+x) and
We set
3 3
2
/ 4 2 0,
3
a a
| |
= + =
|
\ .
resulting in
a
3
=-0.75 u
1
=-a
3
=0.75
The stress in the bar is given by
( )
1.511
du
E x
dx
= =
32
We note here that an exact solution is obtained if piecewise polynomial
interpolationis usedin the constructionof u.
The finite element method provides a systematic way of constructing the
basis function
i
usedin Eq. 2
Galerkins Method
Galerkins method uses the set of governing equations in the
development of an integral form. It is usually presented as one of the
weightedresidual methods.
Lu = P (5)
For the one-dimensional rod considered in Example 1, the governing
equationis the differential equation
0
d du
EA
dx dx
| |
=
|
\ .
We may consider L as the operator
33
()
d d
EA
dx dx
operatingon u.
The exact solution needs to satisfy (5) at every point x. If we seek an
approximate solution u, it introduces an error ( ) x , called the residual:
( )
x Lu P =
(6)
The approximate methods revolve around setting the residual relative to a
weightingfunctionW
i
, to zero:
( )
0 1
i
v
W Lu P dV i ton = =
(7)
34
The choice of the weighting function W
i
leads to various approximation
methods. In the Galerkin method, the weighting functions W
i
are chosen
fromthe basis functionusedfor constructing
u. Let u be represented by
1
n
i i
i
u QG
=
=
(8)
where G
i
, I =1 to n, are basis functions (usually polynomials of x,y,z).
Here, we choose the weighting functions to be a linear combination of
the basis functions G
i
. Specifically, consider an arbitraryfunction
given by
1
n
i i
i
G
=
=
(9)
where the coefficients
i
are arbitrary, except for requiring that satisfy
35
homogeneous (zero) boundary conditions where u
simplified derivations.
in Eq.(8) leads to
Galerkins method can be stated as follows:
Choose basis functions G
i
. Determine the coefficients Q
i
in
1
n
i i
i
u QG
=
=
such that
( )
0
v
Lu P dV =
(10)
For every of the type
1
n
i i
i
G
=
=
where coefficients
i
are arbitrary except
except for requiring that
conditions. The solution of the resulting equations for Q
i
then yields the
approximate solution
satisfy homogenous (zero) boundary
u
36
Galerkins method in elasticity.
Let us turn our attention to the equilibrium equations in elasticity.
Galerkins method requires.
0
xy xy y yz
x xz
x x y x
v yz
xz z
z
f f
x y z x y z
dV
f
x y z
( | | | |
+ + + + + + + +
( | |
\ . \ .
(
=
(
| |
(
+ + +
|
(
\ .
(11)
where
T
x y z
( = + +
Is an arbitrary displacement consistent with the boundary condition of
u. If n = [n
x
,n
y
,n
z
]
T
is a unit normal at a point x on the surface, the
integrationby parts formula is
37
x
V V S
dV dV n dS
x x
= +
(12)
where and are functions of (x,y,z). For multidimensional problems
Eq. 12 is usually referred to as the Green-Gauss theorem or the
divergence theorem. Using this formula, integrating Eq.(12) by parts,
andrearrangingterms, we get
( )
[( )
( ) ( ) ] 0
T T
x x x x y xy z xz x
v v v
x xy y y z yz y x xz y yz z z z
dV f dV n n n n
n n n n n n dS
+ + + +
+ + + + + + =
(13)
38
where
( )
, , , , ,
T
y y y
x x x z z z
x y z z y z x y x
(
= + + +
(
(14)
Is the strain corresponding to the arbitrary displacement field
On the boundary, from Eq.(1.8) we have ( )
x x y xy z xz x
n n n T + + =
so on. At the point loads
, and
( )
x x y xy z xz
n n n + +
dS is equivalent to P
x
, and so on.
These are the natural boundary conditions in the problem. Thus Eq.(13)
yields the Galerkins variational form or weak form for three
dimensional stress analysis:
39
( )
0
T T T T
i
V V V
dV f dV TdS P =
(15)
where is an arbitrary displacement consistent with the specified
boundary conditions of u.
Example: 2
0
d du
EA
dx dx
=
0 0
0 2
u at x
u at x
= =
= =
Let us consider the problem of Example 1 and solve it by Galerkins
approach. The equilibrium equation is
40
Multiplying this differential equation by
, and integrating by parts, we get
1 2
2
0 1 0
0
du d du du
EA dx EA EA
dx dx dx dx
| | | |
+ + =
| |
\ . \ .
where is zero at x = 0 and x = 2. EA (du/dx) is the tension in the rod, which
takes a jump of magnitude 2 at x =1. Thus,
2
1
0
2 0
du d
EA dx
dx dx
+ =
Now we use the same polynomial (basis) for u and . If u
1
and
1
are the
values at x = 1, we have
41
( )
( )
2
1
2
1
2
2
u x x u
x x
=
=
Substituting these and E = 1, A = 1 in the previous integral yields
( )
2
2
1 1
0
1 1
2 2 2 0
8
2 0
3
u x dx
u
(
+ =
(
| |
+ =
|
\ .
This is to be satisfied for every
1
. We get
u
1
= 0.75
42
FINITE ELEMENT MODELING
The steps involved in element division and node numberingare explained.
Element Division
Consider the bar in Fig. 6. The first step is to model the bar as a stepped
shaft, consistingof a discrete number of elements, eachhaving a uniform
cross section. A simple scheme for doing this is to divide the bar into
regions (example 4regions ), as shownin Fig. 7a. The average cross-
sectional area within each regionis evaluatedand then usedto define an
element with uniformcross section.
43
.
.
X
.
X
1
4
3
2
1
2
5
3
4
.
.
.
.
.
(a) (b)
Fig. 7 Finite element modeling of a bar
44
Numbering Scheme
In a one-dimensional problem, each node has only one degree of
freedom (dof). The five-node finite element model in Fig. 7 has five dofs.
The displacements along each dof are denoted by Q
1
, Q
2
,.,Q
5
. In fact,
the column vector Q =[Q
1
, Q
2
,., Q
5
]
T
is called the global displacement
vector. The global load vector is denotedbyF =[F
1
, F
2
, .., F
5
]
T
.
Fig. 8 Q and F vectors
45
Fig. 9 Element Connectivity
46
Co-ordinates and shape functions
1 = +
1 2
1 =
X
1
X
X
2
e
1 2
(a)
(b)
Fig. 10 One dimensional element
Consider a typical finite element in the local coordinate system
(Fig a). Define a natural or intrinsic co-ordinate system, denoted by
, as
e
47
1
2 1
2( )
1 (34)
x x
x x
1
( ) (35 )
1
2
1
( ) (35 )
2
2
N a
N b
=
+
=
1
1
1
Fig. 11 Shape function values
1 =
1 = +
0 =
0
1
1
N
2
=
2
1
N
2
+
=
0
48
Linear interpolation
e e
u
1
u
2
q
1
q
2
U
linear
1 2
1
2
U
unknown
Fig. 12 Displacement models
49
Linear displacement field within the element can be written in terms of
the nodal Displacement q
1
andq
2
as
1 1 2 2
(36) u N q N q = +
In matrix notation
(37) u Nq =
The transformation from x to can be written in terms of N
1
and N
2
as
1 1 2 2
(38) x N x N x = +
Isoparametric formulation
| |
| |
1 2
1 2
,
,
T
N N N
q q q
=
=
where
From Fig. 10b, we see that 1 = at node 1 and 1 =
The length of the element is coveredwhen
at node 2.
changes from-1to 1.
Comparing Eqs.36 and 38, we see that both the displacement u and the
coordinate x are interpolated within the element using the same shape functions
N
1
and N
2
. This is referred to as the isoparametric formulation.
50
Shape functions need to satisfy the following:
The shape function must be continuous within the element. Thus
condition can easily be satisfied by choosing polynomials for the
displacement model.
The shape function must be capable of representing rigid body
displacements of the element. That is when the nodes are given
such displacements corresponding to a rigid body motion, the
element should not experience and strain and hence leads to zero
nodal forces. The constant terms in the polynomials used for the
displacement models would usuallyensure this condition.
The displacement function must be capable of representing constant
strainstates within the element.
51
Example 2
Referringto Fig. E2, do the following:
(a)Evaluate , N
1
, and N
2
at point P.
(b)If q
1
=0.075 mmin. and q
2
=- 0.125 mmin., determine the value of
the displacements q at point P.
x
1
=0.5m.x =0.6m x
2
=0.9m
Fig. E2
52
Solution:
2
(0.6 0.5) 1
0.4
0.5
p
=
=
a) UsingEq. 34, the coordinate of point P is given by
q
p
= 0.75 (0.075) + 0.25 (- 0.125)
= 0.025 mm
Now Eqs. 35a and b yield
N1 = 0.75 and N2 = 0.25
b) Using Eq. a, we get
53
The strain displacement relation is
du
dx
=
(39)
Upon using the chain rule of differentiation, we obtain
d du
d dx
=
(40)
Fromthe relation betweenx and in Eq.34, we have
2 1
2 d
x x
dx
=
(41)
54
Also, since
1 1 2 2 1 2
1 1
2 2
u Nq N q q q
+
= + = +
(42)
we have
1 2
2
q q
du
d
+
=
(43)
Thus, Eq. (b) yields
1 2
2 2
1
( ) q q
x x
= +
(44)
55
The Eq. (f) can be written as
=Bq
(45)
where the (1x2) matrix B, called the element strain-displacement matrix,
is given by
2 1
1
[ 1 1] B
x x
=
(46)
Note: Use of linear shape functions results in a constant B matrix and,
hence, in a constant strain within the element. The stress, from
Hookes law, is
E = Bq
(47)
56
Potential Energy Approach
The general expression for the potential energy
1
2
i i
i
l l l
T T T
Adx u fAdx u Tdx u P =
(48)
The last term, p
i
represents a force acting at point i and u
i
is
displacement at that node
Since the continuum has been discritized into finite elements, the
expression for
Potential energy becomes
1
2
T T T
Adx u fAdx u Tdx Q P
i i
e e e
i
=
(49)
57
The last term in the above equation assumes that point load P
i
are
applied at the nodes. This assumption makes the present derivation
simpler with respect to notation, and is also a common modeling
practice
T T
e i i
e e e i
e
U u fAdx u Tdx QP =
(50)
Where
1
2
T
U Adx
e
=
(51)
is the element strain energy
58
Element stiffness matrix
Consider the strain energy form
1
2
T
e
U Adx =
(52)
Substituting for EBq = and
Bq =
into the above yields
1
2
T T
e
U
e
E Adx =
q B Bq
or
1
[B B ]
2
T
e
T
U E Adx
e
=
q q
(53a)
(53b)
59
In the finite element model, the cross sectional area of element e, denoted
by A
e
is constant. Also , B is a constant matrix, further the transformation
fromx to yields
2 1
2
x x
dx d
=
or
2
e
l
dx d =
where 1 1 L
e
is the length of the element
2 1
x x
The element strain energy U
e
is now written as
1
1
1
B B q
2 2
T T
e
e e e
l
U q A E d
(
=
(
(54)
60
where E is the Youngs modulus of element and by using
1
1
2 d
| |
2
1
1 1
1 2
T
e e e e
e
U q A l E
l
=
`
)
q -1 1
(55)
which results in
1 1
1
1 1 2
T
e e
e
e
A E
U
l
(
=
(
q q
(56)
The above equation is of the form
1
2
T e
e
U k = q q
(57)
61
where the element stiffness matrix ke is given by
1 1
1 1
e
e e
e
A E
k
l
(
=
(
(58)
Force Terms
The element body force term
T
e
u fAdx
potential energy is considered first. Substituting u = N
1
q
1
+ N
2
q
2
we have
appearing in the total
1 1 2 2
( )
T
e
e
u fAdx A f N q N q dx = +
(59)
62
In the above Eqn., A
e
and f are constant within the element and were
consequently brought outside the integral. The above equation can be
writtenas
1
2
e
e
T T
e
e
e
A N dx
u fAdx q
A f N dx
=
`
)
(60)
The integrals of the shape functions above can be readily evaluated
by making the
2
e
l
dx d
| |
=
|
\ .
63
substitution
1
1
1
1
2
1
1
2 2 2
1
2 2 2
e e
e
e e
e
l l
N dx d
l l
N dx d
= =
= =
(61)
Alternatively,
1
e
N dx
is simply the area under the N
1
curve as shown
in Fig. 12, which equals
1
2 2 2
1 / 2. =
Similarly,
1
2 2
1 / 2.
e e
N dx = =
The body force termin Eq. 60 reduces to
64
Fig. 12 Integral of a shape function
1
1 2
T T
e
e
e
A
u fAdx f
=
`
)
q
(62)
65
which is of the form
T T e
e
u fAdx =
q f
(63)
The right side of this equation is of the formDisplacement x Force. Thus,
the element body force vector, f
e
, is identified as
1
1 2
e
e e
A f
=
`
)
f
(64)
The element body force vector above has a simple physical explanation.
Since A
e
e
is the volume of the element and f is the body force per unit
volume, we see that A
e
e
f gives the total body force acting on the
element. The factor in Eq. 64 tells us that this total body force is equally
distributedto the two nodes of the element.
66
The element traction force term
T
e
u Tdx
potential energyis nowconsidered. We have
appearing in the total
( )
T
1 1 2 2
e e
u Tdx N q N q T dx = +
(65)
Since the traction force T is constant within the element, we have
1
T
2
e
T
e
e
T N dx
u T dx q
T N dx
=
`
)
(66)
67
We have already shown that
1 2 2
/ 2.
e e
N dx N dx = =
Thus, Eq. 66 is of the form
T T e
e
u T dx =
q T
where the element traction-force vector is given by
2
1
1 2
e
T
=
`
)
T
(67)
We can provide a physical explanation for this equation as was given for
the element bodyforce vector.
68
At this stage, element matrices k
e
, f
e
, and T
e
have been obtained. After we
account for the element connectivity (in Fig. 3.3, for example, q =[Q
1
, Q
2
]
T
for element 1, q =[Q
2
, Q
3
]
T
for element 2, etc.), the total potential energy in
Eq. 50can be writtenas
T T
1
2
= Q KQ Q F (68)
where K is the global stiffness matrix, F is the global load vector, and Q is
the global displacement vector.
69
Referring to the finite element model in Fig., consider the strain energy
in, say, element 3.
3
3
1
2
T
U = q k q
Substituting for k
3
3 3
3
3
1 1
1
1 1 2
T
E A
U
(
=
(
q q
1
2
T e T e T e
i i
E e e i
PQ =
q k q q f q T
(69)
ASSEMBLY OF THE GLOBAL STIFNESS MATRIXANDLOADVACTOR
70
| |
1
2
3 3 3 3
3 3 3 1 2 3 4 5 3
4 3 3 3 3
3 3
5
0 0 0 0 0
0 0 0 0 0
0 0 0
1
, , , ,
2
0 0 0
0 0 0 0 0
Q
Q
E A E A
U Q Q Q Q Q Q
Q E A E A
Q
(
(
(
(
(
=
`
(
(
(
) (
(
(70)
( )
e
e
e e
e
+ +
K k
F f T P
71
Example 3
Consider the bar as shown in Fig.E3. For each element
,
i i
i A and
are
Fig. E 3
72
the cross-sectional area and length, respectively. Each element i is
subjected to traction force T
i
per unit length and a body force f per unit
volume. The units of T
i
, f, A
i
, and so on are assumed to be consistent. The
Youngs modulus of the material is E. A concentrated load P
2
is applied at
node 2. The structural stiffness matrix and nodal load vector will now be
assembled.
The element stiffness matrixfor eachelement i is obtainedfromEq. 58as
( )
1 1
1 1
i
i
i
EA
k
(
(
=
(
73
The element connectivity table is
Element 1 2
1 1 2
2 2 3
3 3 4
4 4 5
74
1 2
1 2
3 4
3 4
1 1 0 0 0 0 0 0 0 0
1 1 0 0 0 0 1 1 0 0
0 0 0 0 0 0 1 1 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 1 1 0 0 0 0 0 0
0 0 1 1 0 0 0 0 1 1
0 0 0 0 0 0 0 0 1 1
EA EA
EA EA
( (
( (
( (
( ( = +
( (
( (
( (
( (
( (
( (
( ( + +
( (
( (
( (
K
75
which gives
1 1
1 1
1 1 2 2
1 1 2 2
3 3 2 2
2 2 3 3
3 3 4 4
3 3 4 4
4 4
4 4
0 0 0
0 0
0 0
0 0
0 0 0
A A
A A A A
A A A A
E
A A A A
A A
(
(
(
(
| |
+
(
|
\ . (
(
| |
(
+ =
|
(
\ .
(
| |
(
+
|
(
\ .
(
(
(
K
76
The global load vector is assembled as
1 1 1 1
1 1 1 1 2 2 2 2
2
3 3 3 3 2 2 2 2
3 3 3 3 4 4 4 4
4 4 4 4
0
2 2
2 2 2 2
0
2 2 2 2
0
2 2 2 2
0
2 2
A f T
A f T A f T
P
A f T A f T
A f T A f T
A f T
+
+ + +
= + + + +
` `
+ + +
+
) )
F
77
PROPERTIES OF K
1. The dimensionof the global stiffness K is (NxN), where N is the
number of nodes. This follows fromthe fact that each node has
onlyone degree of freedom.
2. K is symmetric.
3. K is a bandedmatrix. That is, all elements outside of the band are
zero. This can be seenin Example 3, just considered. In this
example, K canbe compactlyrepresentedin bandedforms as
Note that K banded is of dimension [N x NBW]
78
NBW = 4
1 4 5 3 2
(a)
NBW = 2
1 4 5 3 2
(b)
Differencebetween dof numbers
NBW max 1
connecting an element
| |
= +
|
\ .
79
THE FINITE ELEMENT EQUATIONS ANDBOUNDARY CONDITIONS
Finite element equations are developed after a consistent treatment of the
boundaryconditions.
Types of Boundary Conditions:
Minimum potential energy theorem states of all possible displacements
that satisfy the boundary conditions of a structural system, those
corresponding to equilibrium configurations make the total potential energy
assume a minimum value .
The potential energy
1
2
T T
= Q KQ Q F
subject to boundary conditions.
Boundary conditions are usually of the type
80
Qp
1
= a
1
, Qp
2
= a
2
,, Qp
r
= a
r
The displacements along dofs P
1
, P
2
, .P
r
are a
1
, a
2
, a
r
These are multipoint constraints of the type
1 1 2 2 0
Q Q
p p
+ =
(71)
E where 0, 1, and 2 are known constants. The b.c are used in
modelinginclined roller supports, rigid connections, or shrink fits.
B.C for specialized displacements for equations can be treated with
1. Elimination approach
2. Penalty approach
81
Elimination Approach
Consider the single boundary condition Q
1
=a
1
. The equilibriumequations
are obtained by minimizing with respect to Q, subject to the boundary
conditionQ
1
=a
1
. For an N dof structure, we have
Q = [Q
1
, Q
2
,,Q
N
]
T
(72)
F = [F
1
, F
2
,, F
N
]
T
The global stiffness matrix is of the form
11 12 1
21 22 2
K
1 2
K K K
N
K K K
N
K K K
NN N N
(
(
(
(
(
(
(
(
(
(
=
82
Note that K is a symmetric matrix. The potential energy
1
2
T T
= Q KQ Q F
canbe writtenin expandedformas
1
2
=
(Q
1
K
11
Q
1
+ Q
1
K
12
Q
2
+ + Q
1
K
1N
Q
N
+ Q
2
K
21
Q
1
+ Q
2
K
22
Q
2
+ + Q
2
K
2N
Q
N
----------------------------------------------------- (73)
+ Q
N
K
N1
Q
1
+ Q
N
K
N2
Q
2
+ + Q
N
K
NN
Q
N
)
(Q
1
F
1
+ Q
2
F
2
+ + Q
N
F
N
)
Substitutingthe boundarycondition Q
1
= a
1
into this expressionfor we obtain
83
1
2
=
(a
1
K
11
a
1
+ a
1
K
12
Q
2
+ + a
1
K
1N
Q
N
+ Q
2
K
21
a
1
+ Q
2
K
22
Q
2
+ + Q
2
K
2N
Q
N
----------------------------------------------------- (74)
+ Q
N
K
N1
a
1
+ Q
N
K
N2
Q
2
+ + Q
N
K
NN
Q
N
)
(a
1
F
1
+ Q
2
F
2
+ + Q
N
F
N
)
Note: Q
1
has been eliminated in the potential energy expression
0 2,3,...,
d
i N
dQ
i
= =
From the above two equations
84
K
22
Q
2
+ K
23
Q
3
+ + K
2N
Q
N
= F
2
K
21
a
1
K
32
Q
2
+ K
33
Q
3
+ + K
3N
Q
N
= F
3
K
31
a
1
---------------------------------------------------------
K
N2
Q
2
+ K
N3
Q
3
+ + K
NN
Q
N
= F
N
K
N1
a
1
These finite element equations can be expressed in matrix form as
22 23 2 2 211 2
3 311 3
32 33 3
11
2 3
K K K F K a Q
N
F K a Q
K K K
N
F K a Q
K K K
N N N
NN N N
(
(
(
(
(
` `
(
(
(
(
(
) )
(75)
An (N-1) x (N-1) matrix obtained by deleting the first row and first column.
85
KQ = F (76)
where K is reduced stiffness matrix. Stress in each element can be
evaluatedusing
E = Bq
(77)
Assume that displacements and stresses have been determined. It is
now necessary to calculate the reaction force R
1
at the support. This
reaction force can be obtained from the finite element equation (or
equilibrium equation) for node 1:
K
11
Q
1
+ K
12
Q
2
+ + K
1N
Q
N
= F
1
+ R
1
Here, Q
1
, Q
2
, , Q
N
are known. F
1
, which equals the load applied at the
support
R
1
= K
11
Q
1
+ K
12
Q
2
+ + K
1N
Q
N
- F
1
86
Example 4
Consider the thin (steel) plate in Fig.E3.3a. The plate has a uniform
thickness t =1 in., Youngs modulus E =30x 10
6
psi, and weight density
. In addition to its self-weight, the plate is subjected to a
point load P =100Ib at its midpoint.
3
0.2836 / . lb in =
a) Write down expressions for the element stiffness matrices and element
body force vectors.
b) Evaluate the stresses in each element.
c) Determine the reaction force at the support.
87
Solution
Fig. E 3.3 The Finite Element Equations; Treatment of Boundary Conditions
88
Use a two element model shows Fig. E 3.3b
(a)FromEq.3.26, we can write down expressions for the element stiffness
matrices of the two elements as
6
X X
1
1 2
1 1
30 10 5.25
1 1 12
(
=
(
k
1
2
Global dof
and
6
X X
2
2 3
1 1
30 10 3.75
1 1 12
(
=
(
k
2
3
89
UsingEq.3.31, the element bodyforce vectors are
X X
1
1
5.25 12 0.2836
1 2
=
`
)
f
1
2
Global dof
and
X X
2
1
3.75 12 0.2836
1 2
=
`
)
f
2
3
The global stiffness matrix K is assembled for k
1
and k
2
as
90
6
X
1 2 3
5.25 5.25 0
30 10
5.25 9.00 3.75
12
0 3.75 3.75
(
(
=
(
(
K
1
2
3
The externally applied global load vector F is assembled fromf
1
, f
2
, and
the point load P =100Ib; as
8.9334
15.3144 100
6.3810
= +
`
)
F
91
Deleting the rows and columns corresponding to fixed d.o.fs (ie) 1st row
andcolumnin the problem, the resultingequations are
6
X
2
3
2 3
9.00 3.75 115.3144
30 10
3.75 3.75 6.3810 12
Q
Q
(
=
` `
(
) )
The solution of theses equations are
Q
2
= 0.9272 x 10
-5
in.
Q
3
= 0.9953 x 10
-5
in.
92
(b) Using Eqs.3.15 and 3.16, we obtain the stress in each element:
| |
6
1
X X
1 12
5
0
30 10 1 1
0.9272X10
=
`
)
= 23.18 psi
and
| |
5
6
1
X X
2 12
5
0.9272X10
30 10 1 1
0.9953X10
=
`
)
= 1.70 psi
93
(c) The reactionforce R1at node 1 is obtained from Eq.3.71. This
calculation require the first row K from part (c). Also, frompart (c),
note that the externallyapplied load (due to the self-weight) at note 1
is F1=8.9334Ib. Thus,
| |
6
X
5
1
5
8.9334
0
30 10
5.25 5.25 0 0.9272X10
12
0.9953X10
R
=
`
)
= -130.6 Ib
Evidently, the reaction is equal and opposite to the total downward
loadon the plate.
94
Penalty Approach
A second method for handling boundary conditions is penalty approach.
Specified displacement boundary conditions are first discussed. The
methodis then extendedto problems with multipoint constraints.
Specified displacement boundary conditions.
Consider the boundarycondition
Q
1
= a
1
. (78)
A spring with a large stiffness C is used to model the support. In this case,
one end of the spring is displaced by an amount a
1
, as shown in Fig.3.10.
The displacement Q
1
along dof 1 will be approximately equal to a
1
, owing to
the relatively small resistance offered by the structure. Consequently, the
net extension of the spring is equal to (Q
1
a
1
). The strain energy in the
springequals
95
Fig. 13
96
( )
2
1
1 1 2 s
U C Q a = (79)
This strain energy contributes to the total potential energy. As a result,
( )
2
1 1
1 1 2 2
T T
M
C Q a = + Q KQ Q F
(80)
The minimization of
M
can be carried out by setting
/ 0, 1,2,..., .
M i
Q i N = =
The resultingfinite element equations are
97
1 1 1 11 12 1
21 22 2 2 2
1 2
(
N
N
N N NN N N
Q F Ca K C K K
K K K Q F
K K K Q F
+ +
(
(
(
=
` `
(
(
) )
(81)
The modifications to handle Q
1
=a
1
are that a large number C is added to
the diagonal element of K and that Ca
1
gets addedon to F
1
.
The reactionis given by
R
1
= - C (Q
1
a
1
) (82)
Choice of C. Let us expandthe first equationin Eq. 3.74, We have
(K
11
+C) Q
1
+K
12
Q
2
++K
1N
Q
N
=F
1
+Ca
1
98
Upon dividing by C, we get
1 11 12 1
1 2 1
1 ...
N
N
K K K F
Q Q Q a
C C C C
| |
+ + + + = +
|
\ .
(83)
Fromthis equation, we see that if C is chosen large enough, then Q
1
a
1
.
Specifically, we see that if C is large compared to the stiffness coefficients
K
11
, K
12
, , K
1N
, then Q
1
a
1
. Note that F
1
is a load applied at the
support (if any), and that F
1
/C is generallyof small magnitude.
Asimple scheme suggests itself for choosingthe magnitude of C:
99
4
max X10
ij
C K =
for
1 i N
1 j N
The choice of 10
4
has been found to be satisfactory on most computers.
The reader may wish to choose a sample problemand experiment with this
(using, say, 10
5
or 10
6
) to check whether the reactionforces differ by much.
100
Fig. 14
(a) Determine the nodal displacements.
(b) Determine the stress in each material.
(c) Determine the reactionforces.
Example 5
Consider the bar shown in Fig.14. An axial load P =200 x 10
3
N is applied
as shown. Using the penalty approach for handling boundary conditions, do
the following:
101
Solution
The element stiffness matrices are
3
1
1 2 Global dof
1 1
70 10 2400
1 1 300
X X
(
=
(
k
and
3
2
2 3
1 1
200 10 600
1 1 400
X X
(
=
(
k
102
The structural stiffness matrixthat is assembledfromk
1
and k
2
is
6
1 2 3
0.56 0.56 0
10 0.56 0.86 0.30
0 0.30 0.30
(
(
=
(
(
K
The global load vector is
F = [0, 200 X 103, 0]
T
Nowdofs 1 and 3 are fixed. When using the penalty approach, therefore, a
large number C is added to the first and third diagonal elements of K.
ChoosingC basedon Eq.3.80, we get
C = [0.86 X 10
6
] X 10
4
103
Thus, the modified stiffness matrix is
6
8600.56 0.56 0
10 0.56 0.86 0.30
0 0.30 8600.30
(
(
=
(
(
K
The finite element equations are given by
1
6 3
2
3
0
8600.56 0.56 0
10 0.56 0.86 0.30 200 10
0 0.30 8600.30 0
X
Q
Q
Q
(
(
=
` `
(
(
)
)
104
which yields the solution
Q = [15.1432 x 10
-6
, 0.23257, 8.1127 x 10
-6
]
T
mm
(b) The element stresses (Eq.3.16) are
| |
6
X
3
X X
1
1 1 1
15.1432 10
70 10
300
0.23257
54.27MPa
=
`
)
=
| |
3
X X
2
6
X
0.23257
1 1 1
200 10
400
8.1127 10
116.29MPa
=
`
)
=
105
(c) The reaction forces are obtained from Eq.3.78 as
R
1
= CQ
1
= [0.86 x 10
10
] x 15.1432 x 10
-6
= 130.23 x10
3
Also,
R
3
= CQ
3
= [0.86 x 10
10
] x 8.1127 x 10
-6
= 69.77 x 10
3
N
106
Fig. 15
Example 6
In Fig. 15a, a load P =60 x 10
3
N is applied as shown. Determine the
displacement field, stress, and support reactions in the body. Take E =20
GPa.
107
Solution
First determine whether contact occurs between the bar and the wall, B. To
do this, assume that the wall does not exist. Then, the solution to the
problemcanbe verified to be
Q
B
= 1.8 mm
where Q
B
is the displacement of point B. Fromthis result, we see that
contact does occur. The problemhas to be re-solved, since the boundary
conditions are now different: The displacement at B is specified to be 1.2
mm. Consider the two-element finite element model in Fig.3.5b. The
boundary conditions are Q
1
=0 and Q
3
=1.2 mm. The structural stiffness
matrixK is
108
3
1 1 0
20(10 )250
1 2 1
150
0 1 1
K
(
(
=
(
(
and the global load vector F is
F = [0, 60 x 10
3
, 0]
T
In the penalty approach, the boundary conditions Q
1
=0 and Q
3
=1.2 imply
the following modifications:
A large number C chosen here as C =(2/3) (1010), is added on to the 1st
and 3rd diagonal elements of K. Also, the number (C x 1.2) gets added on
to the 3rd component of F. Thus, the modified equations are
109
1
5
3
2
7
3
0
20001 1 0
10
1 2 1 60.0(10 )
3
0 1 20001
80.0(10 )
Q
Q
Q
(
(
=
` `
(
(
)
)
The solution is
Q =[7.49985x 10-5, 1.500045, 1.200015] T mm
The element stresses are
| |
| |
5
3
X X
1
3
X X
2
1 1 1
7.49985 10
200 10
150
1.500045
199.996MPa
1.500045 1 1 1
200 10
1.200015 150
40.004MPa
X
=
`
)
=
=
`
)
=
110
The reaction forces are
R
1
= - C x 7.49985 x 10-5
= - 49.999 x 103N
And
R
3
= - C x (1.200015 1.2)
= - 10.001 x 103N
The results obtained from the penalty approach have a small
approximation error due to the flexibility of the support introduced. The
elimination approach for handling boundary conditions yields the exact
reactions, R
1
=- 50.0x 10
3
N and R
3
=- 10.0x 10
3
N.
111
1 1 2 2 0 p p
Q Q + =
0 1, 2
, and
Multipoint Constraints
In problems where, for example, inclined rollers or rigid connections are
to be modeled, the boundaryconditions take the form
where
are known constraints. Such boundary conditions are referred to as
multipoint constraints in the literature.
(84)
112
2
1 1
1 1 2 2 0 2 2
( )
T T
M p p
C Q Q = + + Q KQ Q F
(85)
M
1 1 2 2 0
( )
p p
Q Q +
1 1 2 2 0
,
p p
Q Q +
/ 0, 1,...,
M i
Q i N = =
where C is a large number. Since C is large, takes on a minimum
is verysmall that is, when
as desired. Setting
yields the modified stiffness and force matrices. These modifications are
given as
value only when
Consider the modified total potential-energy expression
113
2
1 1 1 2
1 1 1 1 2 1 2
2
2 1 2 2
2 1 1 2 2 2 2
p p p p
p p p p
p p p p
p p p p
K K
K C K C
K K
K C K C
( + + (
(
(
+ +
(
and
1 1 0 1
2 2 0 1
p p
p p
F F C
F F C
+
` `
+
) )
If we consider the equilibrium equations
1 2
/ 0 / 0
M p M p
Q and Q = =
andrearrange these in the form
1 1 1 2 2 2 p j j p p p j j p p
j j
K Q F R and K Q F R = =
(86)
114
we obtain the reaction forces R
p1
and R
p2
, which are the reaction
components along dofs p
1
and p
2
, respectively, as
2
1
1 1 1 2 2 0 2
1
( )
p p p
p
R C Q Q
Q
( = +
and
2
1
2 1 1 2 2 0 2
2
( )
p p p
p
R C Q Q
Q
( = +
Upon simplification, Eqs.3.84 yield
1 1 1 1 2 2 0
( )
p p p
R C Q Q = +
And
2 2 1 1 2 2 0
( )
p p p
R C Q Q = +
(87)
(88)
115
Example7
Consider the structure shown in Fig.16a. A rigid bar of negligible mass,
pinned at one end, is supported by a steel rod and an aluminumrod. A
loadP =30 kN. N is applied as shown.
Fig. 16
116
(a)Model the structure using two finite elements. What are the boundary
conditions for your model?
(b)Develop the modified stiffness matrix and modified load vector.
Solve the equations for Q. Then determine element stresses.
Solution
(a)The problem is modeled using two elements as shown in
the following connectivitytable:
CONNECTIVITY TABLE
Element no. Node 1 Node 2
1 3 1
2 4 2
117
The boundary conditions at nodes 3 and 4 are obvious: Q
3
=0 and Q
4
=0.
Now, since the rigid bar has to remain straight, Q
1
, Q
2
, and Q
5
are related
as shown in Fig.E3.6b. The multipoint constraints due to the rigid bar
configurationare given by
Q
1
0.333 Q
5
= 0
Q
2
0.833 Q
5
= 0
(b) First, the element stiffness matrices are given by
3
X X
1 3
1 1 53.33 53.33
200 10 1200
10
1 1 53.33 53.33 4500
( (
= =
( (
3 1
k
3
1
118
The global stiffness matrix K is
3
X X
2 3
4 2
1 1 21 21
70 10 900
10
1 1 21 21 3000
( (
= =
( (
k
4
2
3
53.33 0 53.33 0 0
0 21 0 21 0
10 53.33 0 53.33 0 0
0 21 0 21 0
0 0 0 0 0
(
(
(
( =
(
(
(
1 2 3 4 5
K
1
2
3
4
5
119
The K matrixis modified as follows:
A number C =[53.33 x 10
3
] x 10
4
, large in comparison to the stiffness
values, is chosen.
Since Q
3
=Q
4
=0, C is addedon to the (3, 3) and (4, 4) locations of K.
Next, multipoint constraints given in part (a) are considered.
For the first constraint Q
1
0.333Q
5
=0, we note that
0 1 2
0, 1, 0.333. and = = =
The addition to the stiffness matrixis
obtained from Eqs.3.82 a
120
2
7 1 1 2
2
1 2 2
53.33 17.77
10
17.77 5.925926
C C
C C
( (
=
(
(
1 5
1
5
The force addition is zero since
0
0. =
second multipoint constraint Q
2
0.833 Q
5
= 0 yields the stiffness addition
Similarly, the consideration of the
7
2
53.33 44.44
10
44.44 37.037037
(
(
5
2
5
121
On addition of all the preceding stiffness, we obtain the final modified
equations as
1
2
3
3
4
3
5
0 533386.7 0 53.33 0 177777.7
0 0 533354.3 0 21.0 444444.4
10 0 53.33 0 533386.7 0 0
0 0 21.0 0 533354.3 0
177777.7 444444.4 0 0 429629.6
30X10
Q
Q
Q
Q
Q
(
(
(
( =
` `
(
(
(
) )
The solution, obtained from a computer program that solves matrix
equations, is
Q = [0.486 1.215 4.85 x 10
-5
4.78 x 10
-5
1.457] mm
122
The element stresses are now recovered from Eqs. 3.15 and 3.16 as
| |
5 3
1
2
4.85 10 200 10
1 1
4500 0.486
21.60MPa
and
28.35MPa
X X
=
`
)
=
=
123
Fig. 17 Quadratic element in x-and -coordinates
QUADRATIC SHAPE FUNCTIONS
So far, the unknown displacement field was interpolated by linear shape functions
within each element. In some problems, use of quadratic interpolation leads to far
more accurate results
124
Consider a typical three-node quadratic element, as shown in Fig. 3.11a.
In the local numbering scheme, the left node will be numbered 1, the right
node 2, and the midpoint 3. Node 3 has been introduced for the purposes
of passing a quadratic fit and is called an internal node. The notation x
i
=
x-coordinate of node i, i =1,2,3, is used. Further, q =[q
1
, q
2
, q
3
]
T
, where
q
1
, q
2
, and q
3
are the displacements of nodes 1, 2, and 3, respectively.
The x-coordinate system is mapped onto a - coordinate system, which is
given by the transformation
3
2 1
2( ) x x
x x
FromEq. 3.86, we see that =-1, 0, and +1at nodes 1, 3, and 2
- coordinates, quadratic shape functions
(Fig. 3.11b). Now, in
N
1
, N
2
, and N
3
are
125
1
1 2
1
2 2
3
( ) (1 )
( ) (1 )
( ) (1 )(1 )
N
N
N
=
= +
= +
The shape function N
1
is equal to unity at node 1 and zero at nodes 2
and 3. Similarly, N
2
equals unity at node 2 and equals zero at the other
two nodes;
N
3
equals unity at node 3 and equals zero at nodes 1 and 2. The shape
functionN
1
, N
2
, and N
3
are graphedin Fig. 18.
126
Fig. 18 Shape functions N
1
, N
2
, and N
3
127
The expressions for these shape functions can be written down by
inspection. For example, since N
1
=0at
andN
1
=0at
we knowthat N
1
must
(1- ). That is, N
1
is of the form contain the product
= 1
1
(1 ) N c =
The constant c is now obtained from the condition N
1
= 1 at = -1,
which yields
1
2
, c =
resultingin the formula given in Eq.3.87a. These
shape functions are called Lagrange shape functions.
Nowthe displacements field within the element is written in terms of the
nodal displacements as
u = N
1
q
1
+ N
2
q
2
+ N
3
q
3
or
u = Nq
128
Fig. 19 Interpolation using quadratic shape functions
where N =[N
1
, N
2
, N
3
] is a (1 X 3) vector of shape functions and q =[q
1
, q
2
, q
3
]
T
is
the (3 X 1) element displacement vector. At node 1, we see that N
1
=1, N
2
=N
3
=
0, and hence u =q
1
. Similarly, u =q
2
at node 2 and u =q
3
at node 3. Thus, u in
Eq.3.89a is a quadratic interpolation passing through q
1
, q
2
, and q
3
(Fig.19).
129
2 1
3 1 2
2 1
(strain-displacement relation)
(chain rule)
2
(using Eq.3.86)
2
, , (using Eq.3.89)
du
dx
du d
d dx
du
x x d
dN dN dN
x x d d d
=
=
(
=
(
q .
130
2 1
2 1 2 1 2
, , 2
2 2 x x
+
(
=
(
q
= Bq
2 1
2 1 2 1 2
, , 2
2 2
B
x x
+
(
=
(
Using Eqs. 3.87, we have
which is of the form
where B is given by
Using Hookes law, we can write the stress as
131
E = Bq
Note that since N
i
are quadratic shape functions, B in Eq.3.93 is linear in
This means that the strain and stress can vary linearly within the element.
u, ,and
( )
/ 2
e
dx d =
We nowhave expressions for
in Eqs.3.89b, 3.92, and 3.94,
fromEq.3.86.
respectively. Also, we have
Again, in the finite element model considered here, it will be assumed that
cross-sectional area A
e
, body force F, and traction force T are constant
within the element. Substituting for
u, , ,anddx
into the potential-energy
expression yields
132
T T T
e e e
e e e
1 1
T T T T
e e
e e e
1 1
e e
1
T T
e
1
e
1
A u A u T
2
1
E A A N
2 2 2
N
2
i i
i
i i
i
dx f dx dx Q P
d q f d
T d Q P
=
| | | |
(
=
| |
\ . \ .
| |
|
\ .
q B B q
q
133
Comparing the above equation with the general form
T e T e T e
e e e
1
2
i i
i
Q P =
q k q q f q T
yields
1
1
2
e T
e e e
E A
d
( =
k B B
which, upon substituting for B in Eq.3.93, yields
e
e e
e
1 2 3
7 1 8
E A
1 7 8
3
8 8 16
(
(
=
(
(
k
1
2
3
Local dof
134
The element body force vector fe is given by
1
e e
1
A f
2
e T
d
f N
Local dof
which, upon substituting for N in Eqs.3.87, yields
e
e e
1/6
A f 1/6
2/3
=
`
)
f
1
2
3
Similarly, the element traction-force vector T
e
is given by
1
e
1
2
T
e
T
d
T N
135
which results in
where the structural
e
e
1/6
T 1/6
2/3
=
`
)
T
1
2
3
Local dof
The total potential energy is again of the form
T T
1
2
, = Q KQ Q F
and nodal load vector F are assembled from element stiffness stiffness matrix K
matrices and load vectors, respectively.
136
Example 8
Consider the rod (a robot arm) in Fig. 20a, which is rotating at constant angular
velocity =30 rad/s. Determine the axial stress distribution in the rod, using
two quadratic elements. Consider only the centrifugal force. Ignore bending of
the rod.
137
Solution:
A finite element model of the rod, with two quadratic elements, is shown in Fig. E3.
7b. The model has a total of five degrees of freedom. The element stiffness
matrices are (fromEq. 3.96b).
7
1
1 3 2
7 1 8
10 X0.6
1 7 8
3 21
8 8 16
X
(
(
=
(
(
k
1
3
2
Global dof
and
7
2
3 5 4
7 1 8
10 X0.6
1 7 8
3 21
8 8 16
X
(
(
=
(
(
k
3
5
4
138
Thus,
7
1 2 3 4 5
7 8 1 0 0
8 16 8 0 0
10 X0.6
1 8 14 8 1
3 21
0 0 8 16 8
0 0 1 8 7
X
(
(
(
( =
(
(
(
k
1
2
3
4
5
The body force f (lb /in.3) is given by
2
3
Ib/in
r
f
g
=
139
where =weight density and g =32.2 ft/s
2
. Note that f is a function of the
distance r fromthe pin. Taking average values of f over each element, we have
2
X X
1
X
2
X X
2
X
0.2836 10.5 30
32.2 12
6.94
and
0.2836 31.5 30
32.2 12
20.81
f
f
=
=
=
=
Global dof
Thus, the element body force vectors are (from Eq. 3.97b)
140
1
6
1
1
X X
1
6
2
3
0.6 21 f
=
`
)
f
1
3
2
Global dof
and
1
6
2
1
2 6
2
3
0.6 21 X Xf
=
`
)
f
3
4
5
Global dof
Assembling f1 and f2, we obtain
F = [14.57, 58.26, 58.26, 174.79, 43.70]
T
141
Using the elimination method, the finite element equations are
2
7
X
3
4
5
16 8 0 0 58.26
8 14 8 1 58.26
10 0.6
0 8 16 8 174.79 63
0 1 8 7 43.7
Q
Q
Q
Q
(
(
(
=
` `
(
(
)
)
which yields
Q = 10-3 [0, .5735, 1.0706, 1.4147, 1.5294]
T
mm
142
The stresses can now be evaluated from Eqs. 3.93 and 3.94. The element
connectivity table is as follows:
Element Number 1 2 3 Local Node Nos.
1 1 3 2
.
2 3 5 4
Global Node Nos.
Thus,
q = [Q
1
, Q
3
, Q
2
]
T
143
for element1, while
q = [Q
3
, Q
5
, Q
4
]
T
for element 2. Using Eqs. 3.93 and 3.94, we get
1
7
X
1 3
2
2 1 2 1 2
10 , , 2
21 2 2
Q
Q
Q
+ (
=
`
(
)
1
1 1,and
1 =
where denotes the stress in element 1. The stress at node 1 in element
into the previous equation, which results in 1 is obtained by substituting
144
7 3
2
X X
1 1
21
0
10 10 [ 1.5, 0.5, 2.0] 1.0706
.5735
583psi
= +
`
)
=
The stress at node 2 (which corresponds to the midpoint of element 1) is
obtained by substituting for =0:
7 3
2
1 3 21
0
10 10 [ 0.5,0.5,0] 1.0706
.5735
510psi
X X
=
`
)
=
145
Similarly, we obtain
1 2 2 1 2 3 2 2
437 218 0 psi psi = = = =
The axial distribution is shown in Fig.E3.7c. The stresses obtained from the
finite element model can be compared with the exact solution, given by
2
2 2
exact
( ) ( )
2
x L x
g
=
The exact stress distribution based on this equation is also shown in Fig.E3.7c.
146
TEMPERATURE EFFECTS
In this section, the stresses induced by temperature changes in an isotropic
linearly elastic material will be considered. That is, the thermal stress problem
will be considered. If the distribution of the change in temperature, T (x), is
known, then the strain due to this temperature change can be treated as an
initial strain,
0
, given as
0
T =
where is the coefficient of thermal expansion. Note that a positive T implies a
rise in temperature. The stress-strain law in the presence of is shown in
Fig.3.14. Fromthis figure, we see that the stress-strain relation is given by
0
( )
0
E =
147
The strain energy per unit volume, u0, is equal to the shaded area in Fig.3.14
and is given by
( )
1
0 0 2
u =
By using Eq.3.100, we find that Eq.3.101 yields
( ) ( )
1
0 0 0 2
T
u E =
The total strain energy U in the structure is obtained by integrating u0 over the
volume of the structure:
( ) ( )
1
0 0 2
T
L
U E Adx =
148
For a structure modeled using one-dimensional linear elements, this equation
becomes
( ) ( )
1
2
0 0
1
1
2 2
T
e e
e
U A E d
Noting that , = Bq we get
1 1
2 2
0
1 1
2
2
0
1
2 2 2
1
2 2
T T T T
e e e e
e e
e e
e
U E A d E A d
E A
| |
=
|
\ .
+
q B B q q B
149
Examining the strain energy expression, we see that the first termo the right side
yields the element stiffness matrix derived earlier in Section 3.4; the last termis a
constant term and is of no consequence since it drops out of the equilibrium
equations, which are obtained by setting d / dQ =0. The second termyields the
desired element load vector e, as a result of the temperature change:
1
0
1
2
e T
e
e e
E A d
This equation can be simplified by substituting for B =[-1 1] / (x
2
x
1
) and noting
that
0
T =
. Thus,
2 1
1
1
e
e e e
E A T
x x
=
`
150
In Eq.3.103b, T is the average change in temperature within the element. The
temperature load vector in Eq.3.103b can be assembled along with the body force,
traction-force, and point load vectors to yields the global load vector F, for the
structure. This assembly can be denoted as
( )
e e e
e
= + + +
F f T P
After solving the finite element equations KQ = F for the displacements Q, the stress
in each element can be obtained from Eq. (3.100) as
( )
E T = Bq
Or
| |
2 1
1 1
E
E T
x x
=
q
151
Example 3.8
An axial load P =300 x 10
3
N is applied at 200
o
C to the rod as shown in
Fig. E3.8. The temperature is then raised to 600
o
C.
a) Assemble the K and F matrices.
b) Determine the nodal displacements and element stresses.
Solution:
(a)The element stiffness matrices are
3
X X
1
3
X X
2
1 1
70 10 900
/
1 1 200
1 1
200 10 1200
/
1 1 300
N mm
N mm
(
=
(
(
=
(
k
k
152
Thus,
3
315 315 0
10 315 1115 800 /
0 800 800
K N mm
(
(
=
(
(
Now, in assembling F, both temperature and point load effects have to be
considered. The element temperature forces due to T =40
0
C are obtained from
Eq.3.103bas
1 3 6
X X X X X
1
70 10 900 23 10 40
1
=
`
)
1
2
Global dof
N
and
153
2 3 6
X X X X X
1
200 10 1200 11.7 10 40
1
=
`
)
1
2
N
Upon assembling
1
,
2
, and the point load, we get
3
57.96
10 57.96 112.32 300
112.32
= +
`
)
F
or
3
10[ 57.96,245.64,112.32]
T
N = F
154
(a)The elimination approach will now be used to solve for the displacements.
Since dofs 1 and 3 are fixed, the first and third rows and columns of K, together
with the first and third components of F, are deleted. This results in the scalar
equation
103 [1115] Q
2
= 103 x 245.64
yielding
Q
2
= 0.220 mm
Thus,
Q = [0, 0.220, 0] T mm
In evaluating element stresses, we have to use Eq.3.105b:
| |
3
X
3 6
X X X X
1
0
70 10
1 1 70 10 23 10 40
0.220 200
12.60Mpa
=
`
)
=
155
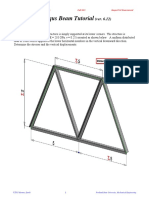
Trusses
Introduction
A typical plane truss is shown in Fig. 1. A truss structure consists of members with
two-force only. That is, every truss element is in direct tension or compression
(Fig. 2). In a truss, it is required that all loads and reactions are applied only at the
joints and that all members are connected together at their ends by frictionless
pin joints. The finite element method provides forces in the members joint
deflections. Effects of temperature changes and support settlements can also be
routinely handled.
Fig. 1 A two-dimensional truss
156
Fig. 2 A two-force member
157
Plane Trusses
Local and Global Coordinate Systems
The main difference between the one-dimensional structures and trusses is
that the elements of a truss have various orientations. To account for these
different orientations, local and global coordinate systems are used.
A typical plane-truss element is shown in local and global coordinate systems
in Fig. 3. In the local numbering scheme, the two nodes of the element are
numbered 1 and 2. The global x-, y-coordinate systemis fixed and does not
depend on the orientation of the element. In the global coordinate system,
every node has two degrees of freedom (dofs). A node whose global node
number is j has associated with it dofs 2j 1 and 2j. The global displacements
associated with node j are Q
2j-1
and Q
2j
, as shown in Fig. 1
158
Fig. 3 A two-dimensional truss element in (a) a local coordinate system and
(b) a global coordinate system
159
Let q'
1
, and q'
2
be the displacements of nodes 1 and 2, respectively, in the local
coordinate system. Thus, the element displacement vector in the local coordinate
systemis denoted by
q' = [q'
1
, q'
2
] T (1)
The element displacement vector in the global coordinate system is a (4 x 1)
vector denoted by
q = [q
1
, q
2
, q
3
, q
4
]
T
(2)
The relationship between q' and q is developed as follows:
In fig. 3b, we see that q'
1
equals the sumof the projections of q
1
and q
2
onto the
x'-axis. Thus,
q'
1
= q
1
cos + q
2
sin (3a)
160
Similarly,
q'
2
= q
3
cos + q
4
sin (3b)
At this stage, the direction cosines and m are introduced as =cos and m
=cos (=sin ). These direction cosines are the cosines of the angles that the
local x'-axis makes with the global x-, y-axes, respectively. Equations 3a and 3b
can nowbe written in matrix formas
where the transformation matrix L is given by
q' =Lq (4)
0 0
0 0
m
m
(
=
(
L
(5)
161
Formulas for Calculating and m
Simple formulas (Eqn. 6) are given for calculating the direction cosines and m
from nodal coordinate data. Referring to Fig. 4, let (x
1
, y
1
) and (x
2
, y
2
) be the
coordinates of nodes 1 and 2, respectively. We then have
2 1
2 1
2 2
2 1 2 1
cos
cos ( sin )
( ) ( )
e
e
e
x x
y y
m
x x y y
= =
= = =
= +
Fig. 4 Direction cosines
162
2 1 2 1
e e
x x y y
m
= =
(6)
where the length
e
is obtained from
2 2
2 1 2 1
( ) ( )
e
x x y y = +
(7)
The expressions in Eqs. 6 and 7 are obtained fromnodal coordinate data and
can readily be implemented in a computer program.
163
Element Stiffness Matrix
The truss element is a one-dimensional element when viewed in the local
coordinate system.
1 1
1 1
e e
e
E A
(
=
(
(8)
where A
e
is the element cross-sectional area and E
e
is Youngs modulus. The
element strain energy in local coordinates is given by
T
1
2 e
U
= q k q
(9)
164
Substituting for
q = Lq
into Eq. 9, we get
T T
1
2 e
U
= q [L k L]q
(10)
The strain energy in global coordinates can be written as
T
1
2 e
U = q kq
(11)
where k is the element stiffness matrix in global coordinates. From the previous
equations, we obtain the element stiffness matrix in global coordinates as
T
= k L k L
(12)
Substituting for L from Eq. 5 and 8 and k' from Eq. 8, we get
2 2
2 2
2 2
2 2
e e
e
m m
m m m m E A
m m
m m m m
(
(
(
=
(
(
k
(13)
165
Stress Calculations
Expressions for the element stresses can be obtained by
e
E =
(14a)
Since the strain
is the change in length per unit original length,
2 1
e
e
q q
E
| |
1
2
1 1
e
e
q
E
q
=
`
(14b)
166
This equation can be written in terms of the global displacements q using the
transformation
= q Lq
as
| |
1 1
e
e
E
= Lq
(15)
Substituting for L from Eq. 5 yields
| |
e
e
E
m m = q
(16)
167
Consider the four-bar truss shown in Fig. 5a. It is given that E =29.5 x 106 psi
andA
e
=1 in
2
. for all elements. Complete the following:
a) Determine the element stiffness matrix for each element.
b) Assemble the structural stiffness matrix K for the entire truss.
c) Using the elimination approach, solve for the nodal
displacement.
d) Recover the stresses in each element.
e) Calculate the reaction forces
Example 1
Fig. 5
168
Solution
a) It is recommended that a tabular from be used for representing nodal
coordinate data and element information. The nodal coordinate data are as
follows
Node x y
1 0 0
2 40 0
3 40 30
4 0 30
The element connectivity table is
169
Element 1 2
1 1 2
2 3 2
3 1 3
4 4 3
e
m
Element
1 40 1 0
2 30 0 -1
3 50 0.8 0.6
4 40 1 0
170
For example, the direction cosines of elements 3 are obtained as
= (x3 x1) /
e
e
= (40 0) / 50 = 0.8 and m = (y
3
y
1
) / =(30-0) / 50 =0.6.
Now, using Eq. 13, the element stiffness matrices for element 1 can be written as
6
1
1 2 3 4
1 0 1 0 1
0 0 0 0 2
29.5(10 )
1 0 1 0 3 40
0 0 0 0 4
(
(
(
=
(
(
k
e
171
6
2
5 6 3 4
0 0 0 0 5
0 1 0 1 6
29.5(10 )
0 0 0 0 3 30
0 1 0 1 4
(
(
(
=
(
(
k
6
3
1 2 5 6
.64 .48 .64 .48 1
.48 .36 .48 .36 2
29.5(10 )
.64 .48 .64 .48 5 50
.48 .36 .48 .36 6
(
(
(
=
(
(
k
172
6
4
7 8 5 6
1 0 1 0 7
0 0 0 0 8
29.5(10 )
1 0 1 0 5 40
0 0 0 0 6
(
(
(
=
(
(
k
b. The structural stiffness matrix K is now assembled fromthe element stiffness
matrices. By adding the element stiffness contributions, nothing the element
connectivity, we get
173
6
22.68 5.76 15.0 0 7.68 5.76 0 0
5.76 4.32 0 0 5.76 4.32 0 0
15.0 0 15.0 0 0 0 0 0
0 0 0 20.0 0 22.68 0 0
29.5(10 )
7.68 5.76 0 0 22.68 5.76 15.0 0 600
5.76 4.32 0 20.0 5.76 24.32 0 0
0 0 0 0 15.0 0 15.0 0
0 0 0 0 0 0 0 0
(
(
(
(
(
(
=
(
(
(
(
(
(
K
1
2
3
4
5
6
7
8
174
The structural stiffness matrix K given above needs to be modified to account
for the boundary condition. The row and columns corresponding to dofs
1,2,4,7, and 8,which correspond to fixes supports, are deleted from the K
matrix. The reduced finite element equations are given as
3
6
5
6
15 0 0 20000
29.5(10 )
0 22.68 5.76 0
600
0 5.76 27.32 25000
Q
Q
Q
(
(
=
` `
(
(
) )
Solution of these equations yields the displacements
3
3
3
5
3
6
27.12(10 )
5.65(10 )
22.25(10 )
Q
Q
Q
=
` `
)
)
in.
175
The nodal displacement vector for the entire structure can therefore be written as
Q = [0, 0, 27.12 (10
-3
), 0, 5.65 (10
-3
), -22.25 (10
-3
), 0, 0]
T
in.
(d) The stress in each element can nowbe determined fromEq.16 , as shown below.
| |
6
1
3
X
0
0
29.5(10 )
1 0 1 0
40
27.12 10
0
=
`
)
= 20 000.0 psi
176
The stress in member 2 is given by
| |
3
3 6
2
3
5.65(10 )
22.25(10 ) 29.5(10 )
0 1 0 1
30 27.12(10 )
0
=
`
)
= 21 880.0 psi
3
4
5208.0psi
4167.0psi
=
=
177
(e) The final step is to determine the support reactions.
R = KQ F
1
3
2
6
4
3
7
3
8
0
0
22.68 5.76 15.0 0 7.68 5.76 0 0
27.12(10 )
5.76 4.32 0 0 5.76 4.32 0 0
0
29.5(10 )
0 0 0 20.0 0 20.0 0 0
5.65(10 ) 600
0 0 0 0 15.0 0 15.0 0
22.25(10 )
0 0 0 0 0 0 0 0
0
0
R
R
R
R
R
(
(
(
( =
` `
(
(
)
)
178
which results in
1
2
4
7
8
15833.0
3126.0
lb 21879.0
4167.0
0
R
R
R
R
R
=
` `
) )
A free body diagram of the truss with reaction forces and applied loads is shown in
Fig. E 5b.
179
Temperature Effects
The element temperature load in the local coordinate system is given by
0
1
E
1
e e
A
`
)
=
(17)
where the initial strain 0 associated with a temperature change is given by
0
T =
(18)
in which is the coefficient of thermal expansion, and T is the average changes
in temperature in the element. Nowexpress the load vector in Eq. 17 in the global
coordinate system.
T T
= q q
(19)
180
where is the load vector in the global coordinate system. Substituting for
q = Lq
into Eq. 19 we get
T T T
=
q L q
(20)
Comparing the left and right sides of this equation, we obtain
T
= L
(21)
Substituting for L from Eq. 5, we can write down the expression for the element
temperature load as
0
e
e e
m
E A
m
=
`
)
(22)
181
The temperature loads, along with other externally applied loads, are assembled in
the usual manner to obtain the nodal vector F. Once the displacements are
obtained by solving the finite element equations, the stress in each truss element is
obtained from
( )
0
E =
(23)
This equation for the element stress can be simplified by using Eq.16 and noting
that , to obtain
0
T =
| |
e
e
e
E
m m - E T = q
(24)
182
Example 2
The four-bar truss of Example is considered here, but the loading is different. Take
E =29.5(106) psi and =1/150 000 per
0
F.
a) There is an increase in temperature of 50
o
F in bars 2 and 3 only (Fig 6a).
There are not other loads on the structure. Determine the nodal
displacements and element stresses as a result of this temperature
increase. Use the elimination approach.
b) A support settlement effect is considered here. Node 2 settles by 0.12 in.
vertically down, and in addition, two point loads are applied on the structure
(Fig. 6b). Write down (without solving) the equilibrium equations KQ =F,
where K and F are the modified structural stiffness matrix and load vector,
respectively. Use the penalty approach
183
Solution
(a) The stiffness matrix for the truss structure has already been developed in
Example. 1 Only the load vector needs to be assembled due to the
temperature increase. Using Eq.22, the temperature loaded as a result of
temperature increase in elements 2 and 3 are, respectively,
(a) (b)
Fig.6
184
6
2
0 5
1 6
29.5(10 ) 50
0 3 150,000
1 4
=
`
Global dof
and
6
2
0.8 1
0.6 2
29.5(10 ) 50
0.8 5 150,000
0.6 6
=
`
)
185
The 2 and 3 vectors contribute to the global load vector F. Using the
elimination approach, we can delete all rows and columns corresponding to
support dofs in K and F. The resulting finite element equations are
3
6
5
6
15.0 0 0 0
29.5(10 )
0 22.68 5.76 7866.7
600
0 5.76 24.32 15733.3
Q
Q
Q
(
(
=
` `
(
(
) )
which yield
3
5
6
0
0.003951
0.01222
Q
Q
Q
=
` `
) )
in.
186
The element stresses can now be obtained from Eq. 24. For example, the
stress in element 2 is given as
| |
6 6
2
0.003951
0.01222
29.5( 10 ) 29.5(10 ) .50
0 1 0 1
0 30 150,000
0
=
`
)
= 8631.7 psi
The complete stress solution is
1
2
3
4
0
2183
3643
2914
=
` `
) )
Psi
187
(b) Support 2 settles by 0.12 in vertically down, and two concentrated
forces are applied (Fig. 6b) Typically, C may be chosen 104 times the
largest diagonal element of the unmodified stiffness matrix. Further, a
force Ca is added to the force vector, where a is the specified displacement.
In this example, for dof 4, a = 0.12 in., and consequently, a force equal to
0.12C gets added to fourth location in the force vector. Consequently, the
modified finite element equations are given by
6
22.68 5.76 15.0 0 7.68 5.76 0 0 Q
1
4.32 0 0 5.76 4.32 0 0 Q
2
15.0 0 0 0 0 0 Q
3
20.0 0 20.0 0 0 Q
29.5(10 )
4
22.68 5.76 15.0 0 600 Q
5
24.32 0 0 Q
6
15.0 0 Q
7
symmetric Q
8
C
C
C
C
C
`
)
+
(
(
+
(
(
(
+
(
=
(
(
(
(
+
(
(
0
0
20000
0.12
0
25000.0
0
0
C
)
188
3
4
5
6
0.0271200
0.1200145
0.0323242
0.1272606
Q
Q
Q
Q
=
` `
) )
in
and
1
2
3
4
20000.0
7125.3
29791.7
23833.3
=
` `
) )
psi
189
THREE DIMENSIONAL TRUSSES
The 3-D truss element can be treated as a straightforward generalization of the
2-D truss element discussed earlier. The local and global coordinate systems
for a 3-D truss element are shown in Fig. 7, the nodal displacement vector in
local coordinates is
T
1, 2
= q q
(
q
(25)
(a)
190
(q
1
i +q
2
j+q
3
k)
( ) ( )
( ) ( ) ( )
1 1 2 3
1 2 3
2 4 5 6
2 1 2 1 2 1
i j k . i j k
cos , cos , cos ,
e e e
q q q q m n
q mq nq
q q mq nq
x X m x Y n x Z
x x y y z z
= + + + +
= + +
= + +
= = =
= = =
Fig. 7 A three - dimensional truss element in local and global coordinate systems.
191
The nodal displacement vector in global coordinates is now (Fig. 7b)
q = [q
1
, q
2
, q
3
, q
4
, q
5
, q
6
]
T
(26)
we find that the transformation between local and global co-ordinates is
=
q Lq (27)
where the transformation matrix L is given by
0 0 0
=
0 0 0
m n
m n
(
(
L
(28)
x in which ,m, and n are the direction cosines of the local
global x-,y-, and z-axes, respectively. The element stiffness matrix in global
coordinates is given by Eq. 12, which yields
-axis with respect to the
192
2 2
2 2
2 2
e e
2 2
e
2 2
2 2
E A
m n m n
m m mn m m mn
n mn n n mn n
m n m n
m m mn m m mn
n mn n n mn n
(
(
(
(
(
(
(
(
(
k =
(29)
The formulae for calculating
, m, and n are
2 1 2 1 2 1
e e e
x x y y z z
m n
= = =
(30)
193
where the length e
of the element is given by
2 2 2
2 1 2 1 2 1
( ) ( ) ( )
e
x x y y z z = + + (31)
Stress Calculations
Since strains are constant in a constant-strain triangle (CST) element, the
corresponding stresses are constant
= DBq
194
Example
Thickness t =0.5 in.,
E =30 X 10
6
psi, =
0.25
Fig. 8
195
Solution
For plane stress conditions, the material property matrix is given by
7 7
7 7
2
7
1 0 3.2X10 0.8X10 0
1 0 0.8X10 3.2X10 0
1
1 0 0 1.2X10
0 0
2
v
E
D v
v
v
(
(
(
(
(
= =
(
(
(
(
(
Using the local numbering pattern used in Fig. we establish the connectivity as
follows:
Nodes
Element No. 1 2 3
1 1 2 4
2 3 4 2
196
On performing the matrix multiplication DB
e
, we get
1 7
1.067 0.4 0 0.4 1.067 0
10 0.267 1.6 0 1.6 0.267 0
0.6 0.4 0.6 0 0 0.4
(
(
=
(
(
DB
and
2 7
1.067 0.4 0 0.4 1.067 0
10 0.267 1.6 0 1.6 0.267 0
0.6 0.4 0.6 0 0 0.4
(
(
=
(
(
DB
These two relationships will be used later in calculating stresses using =DB
e
q.
The multiplication gives the element stiffness matrices,
T
e e
e e
t A B DB
197
1 7
1 2 3 4 7 8 Global dof
0.983 0.5 0.45 0.2 0.533 0.3
1.4 0.3 1.2 0.2 0.2
0.45 0 0 0.3
10
1.2 0.2 0
0.533 0
symmetric 0.2
(
(
(
(
=
(
(
(
(
k
2 7
5 6 7 8 3 4 Global dof
0.983 0.5 0.45 0.2 0.533 0.3
1.4 0.3 1.2 0.2 0.2
0.45 0 0 0.3
10
1.2 0.2 0
0.533 0
symmetric 0.2
(
(
(
(
=
(
(
(
(
k
198
1
7
2
3
0.983 0.45 0.2 0
10 0.45 0.983 0 0
0.2 0 1.4 1000
Q
Q
Q
(
(
=
` `
(
(
) )
Solving for Q
1
, Q
3
, and Q
4
, we get
Q
1
= 1.913 x 10-5 in. Q
3
= 0.875 x 10-5 in. Q
4
= 7.436 x 10-5 in.
For element 1, the element nodal displacement vector is given by
q
1
= 10
-5
[1.913, 0, 0.0875, 7.436, 0, 0]
T
199
The element stresses
1
are calculated from DB
1
q as
1
= [93.3, 1138.7, 62.3]
T
psi
Similarly,
q
2
= 10
-5
[0, 0, 0, 0, 0.875, 7.436]
T
2
= [93.4, 23.4, 297.4]
T
psi
200
Temperature Effects
If the distribution of the change in temperature T (x, y) is known, the strain
due to this change in temperature can be treated as an initial strain
0
.
T
0
[ , , 0] T T =
(61)
for plane stress and
T
0
(1 ) [ , , 0] v T T = +
(62)
The stresses and strains are related by
0
( ) = D
(63)
201
The effect of temperature can be accounted for by considering the strain energy
term.
( ) ( )
T
0 0
1
2
U t dA =
D
( )
T T T
0 0 0
1
2
2
t dA = +
D D D
(64)
The first termin the previous expansion gives the stiffness matrix derived
earlier. The last term is a constant, which has no effect on the
minimization process. The middle term, which yields the temperature
load, is now considered in detail. Using the strain displacement
relationship
, = Bq
T T
0 0
( )
T
e e
A
e
tdA t A =
D q B D (65)
202
Example
Consider the two-dimensional loaded plate shown in Fig. In addition to the
conditions defined in Example, there is an increase in temperature of the plate
of 800 F. The coefficient of linear expansion of the material is 7 X 10-6/oF.
Determine the additional displacements due to temperature. Also, calculate the
stresses in element 1.
Solution
We have
6 o 0
X 7 10 / F and 80 F. So T
= =
4
0
5.6
10 5.6
0 0
T
T
( (
( (
=
( (
( (
203
Thickness t equals 0.5, and the area of the element A is 3 in
2
. The element
temperature loads are
1 1 T
0
( ) t A = DB
where DB1 is calculated in the solution of Example. On evaluation, we get
| |
T
1 T
( ) 11206 16800 0 16800 11206 0 =
with associated dofs 1, 2, 3, 4, 7, 8, and
| |
T
2 T
( ) 11206 16800 0 16800 11206 0 =
with associated dofs 5, 6, 7, 8, 3, and 4.
204
Picking the forces for dofs 1, 3, and 4 fromthe previous equations, we have
| | | |
T
1 3 4
11206 11206 16800 F F F = = F
On solving KQ = F, we get
| |
3 3 3
X X X
1 3 4
1.862 10 1.992 10 0.934 10 in Q Q Q
(
=
The displacements of element 1 due to temperature are
T
1 3 4 3
X X X 1.862 10 0 1.992 10 0.934 10 0 0
(
=
q
205
The stresses are calculated using Eq. as
1 1 T 1
0
( ) = DB q D
On substituting for the terms on the right-hand side, we get
| |
T
1 4
10 1.204 2.484 0.78 psi =
We note that the displacements and stresses just calculated are due to
temperature change.
206
Problem modeling and boundary conditions
207
208
Q
2i
moves along n as seen in Fig. and is the angle of inclination of n with
respect to x-axis, we have
2 1 2
sin cos 0
i i
Q Q
=
This boundary condition is seen to be a multipoint constraint. Using the penalty
approach presented this amounts to adding a termto the potential energy as in
209
Two-Dimensional Problems Using Constant Strain Triangles
Introduction
The displacements, traction components, and distributed body forces values are
functions of the position indicated by (x, y). The displacement vector u is given as
| |
T
u u, v =
(1)
where u and are the x and y components of displacement u, respectively. The
stresses and strains are given by
T
, ,
x y
xy
(
=
(2)
T
, ,
x y xy
( =
(3)
210
Fig. 1 shows a two-dimensional problem in a general setting. The body force,
traction vector, and elemental volume are given by
y
x
t =thickness at (x, y)
f
x
, f
y
=body force components
per unit volume at (x, y)
Fig. 1 Two dimensional problem
211
f = [f
x
, f
y
] T T = [T
x
, T
y
]T and dV = t dA (4)
where t is the thickness along the z direction. The body force f has the units
force/unit volume, while the traction force T has the units, force/unit area. The
strain-displacement relations are given by
T
u v u v
, ,
x y y x
(
| |
= +
( |
\ .
(5)
Stress and strains are related by
D =
(6)
212
Finite Element Modeling
The two- dimensional region is divided into straight-sided triangles. Fig.2 shows a
typical triangulation.
Fig. 2 Finite element discretization
213
As seen from the numbering scheme used in trusses, the displacement
components of node j are taken as Q
2j-1
in the x direction and Q
2j
in the y
direction. The global displacement vector is denoted as
Q = [Q
1
, Q
2
Q
N
]
T
(7)
where N is the number of degrees of freedom.
Computationally, the information on the triangulation is to be represented in the
formof nodal coordinates and connectivity.
214
Element Connectivity
Three nodes
Element number
e 1 2 3
1 1 2 4
2 4 2 7
:
11 6 7 10
:
20 13 16 15
215
The displacement components of a local node j in Fig. 3 are represented as q
2j-1
and q
2j
in the x and y directions, respectively. The element displacement vector is
denoted as
q = [q
1
, q
2
, q
6
]
T
(8)
Fig.3 Triangular element.
216
Constant Strain Triangle (CST)
The displacements at points inside an element are represented in term of the
nodal displacement of the element. For the constant strain triangle, the shape
functions are linear over the element. The three shape functions N
1
, N
2
and N
3
corresponding to nodes 1, 2, and 3, respectively, are shown in Fig.4. In particular,
N
1
+ N
2
+N
3
represents a plan at a height of 1 at nodes 1, 2, and 3, and, thus, it is
parallel to the triangle 123.
N
1
+ N
2
+N
3
= 1 (9)
N
1
, N
2
and N
3
are therefore not linearly independent; only two of these are
independent. The independent shape functions are conveniently represented by
the pair ,.
N
1
= N
2
= N
3
= 1- - (10)
217
where , are natural coordinates (Fig.4).
The shape functions can be physically represented by area coordinates. A
point (x, y) in a triangle divides it into three areas, A
1
, A
2
, and A
3
, as shown in
Fig.5. The shape functions N
1
, N
2
and N
3
are precisely represented by
Fig. 4 Shape functions.
218
Fig. 5 Area coordinates
1 2
3
1 2 3
A A
A
N N N
A A A
= = =
(11)
where A is the area of the element. Clearly, N
1
+ N
2
+N
3
= 1 at every point inside
the triangle.
219
Isoparametric Representation
The displacements inside the element are nowwritten using the shape functions
and the nodal values of the unknown displacement field.
1 1 2 3 3 5
1 2 2 4 3 6
u N q N q N q
N q N q N q
= + +
= + +
(12a)
or, using Eq.10
( ) ( )
( ) ( )
1 5 3 5 5
2 6 4 6 6
u q q q q q
q q q q q
= + + + +
= + + + +
(12b)
The relations 12a can be expressed in a matrix form by defining a shape function
matrix
1 3
1 2 3
0 0
=
0 0 0
2
N 0 N N
N N N
(
(
N
(13)
and
u = Nq
(14)
220
The coordinates can be interpolated as
1 1 2 2 3 3
1 2 2 2 3 3
x N x N x N x
y N y N y N y
= + +
= + +
(15a)
Substituting for N
1
, N
2
and N
3
= (1 N
1
N
2
)
( ) ( )
( ) ( )
1 3 2 3 3
1 3 2 3 3
x x x x x x
y y y y y y
= + +
= + +
(15b)
Using the notation, x- and y- coordinates to the - and - coordinates. Equation
12expresses u and as functions of and .
221
Example 1
Evaluate the shape functions N
1
, N
2
and N
3
at the interior point P for the
triangular element shown in Fig.E1
Fig. E 1 Examples 1 and 2
222
Solution Using the isoperametric representation (Eqs. 15), we have
3.85 = 1.5N
1
+ 7N
2
+4N
3
= 2.5 + 3 +4
4.8 = 2N
1
+ 3.5N
2
+7N
3
= 5 3.5+7
These two equations are arranged in the form
2.5 3 0.15
5 3.5 2.2
=
+ =
Solving the equations, we obtain = 0.3 and = 0.2, which implies that
N
1
= 0.3 N
2
= 0.2 N
3
= 0.5
223
( ( , ), ( , )) u u x y = ( ( , ), ( , )) v v x y =
In evaluating the strains, partial derivatives of u and are to be taken with
and similarly
Using the chain rule for partial derivatives of u, we have
respect to x and y.
u u x u y
x y
u u x u y
x y
= +
= +
which can be written in matrix notation as
u x y
u
x
u
u x y
y
(
(
(
=
` `
(
(
)
)
(16)
224
Where the (2 X 2) square matrix is denoted as the Jacobian of the transformation, J:
x y
x y
(
(
(
=
(
(
J
(17)
On taking the derivative of x and y,
13 13
23 23
x y
x y
(
=
(
(
J
(18)
225
Also, from Eq.16
1
u
u
x
u
u
y
=
` `
)
)
J (19)
Where J
-1
is the inverse of the J acobian J, given by
23 13
1
23 13
1
det
y y
x x
(
=
(
J
J
(20)
13 23 23 13
det x y x y = J (21)
The magnitude of det J is twice the area of the triangle.
1
2
det A = J
(22)
226
Example 2
Determine the J acobian of the transformation J for the triangular element shown
in Fig. E 1.
Solution We have
13 13
23 23
2.5 5.0
3.0 3.5
x y
x y
(
(
= =
(
(
J
Thus, det J =23.75 units. This is twice the area of the triangle. If 1, 2, 3 are in a
clockwise order, then det J will be negative.
FromEqs. 19 and 20, it follows that
23 13
23 13
1
det
u u
u
y y
x
u
u u
x x
y
=
` `
+
)
)
J
(23a)
227
Replacing u by the displacement , we get a similar expression
23 13
23 13
v v
v
1
v
v v det
y y
x
x x
y
=
` `
+
)
)
J
(23b)
Using the strain displacement relations (5) and Eqs. 12 b and 23, we get
v
v
u
x
y
u
y x
=
`
+
)
228
23 1 5 13 3 5
23 2 6 13 4 6
23 1 5 13 3 5 23 2 6 13 4 6
( ) ( )
1
( ) ( )
det
( ) ( ) ( ) ( )
y q q y q q
x q q x q q
x q q x q q y q q y q q
= +
`
+ +
)
J
(24a)
Fromthe definition of xij and yij, we can write y31 =y13 and y12 =y13 y23, and
so on. The foregoing equation can be written in the form
23 1 31 3 12 5
32 2 13 4 21 6
32 1 23 2 13 3 31 4 21 5 12 6
1
det
y q y q y q
x q x q x q
x q y q x q y q x q y q
+ +
= + +
`
+ + + + +
)
J
(24b)
This equation can be written in matrix formas
= Bq (25)
229
where B is a (3 x 6) element strain-displacement matrix relating the three strains
to the six nodal displacements and is given by
23 31 12
32 13 21
32 23 13 31 21 12
0 0 0
1
0 0 0
det
y y y
x x x
x y x x x y
(
(
=
(
(
B
J
(26)
It may be noted that all the elements of the B matrix are constants expressed in
terms of the nodal coordinates.
Example 3
Find the strain nodal displacement matrices B
e
for the elements shown in Fig. E
3. Use local number given at the corners.
Fig. E 3
230
Solution We have
23 31 12
32 13 21
32 23 13 31 21 12
0 0 0
1
0 0 0
det
y y y
x x x
x y x x x y
(
(
=
(
(
1
B
J
2 0 0 0 2 0
1
0 3 0 3 0 0
6
3 2 3 0 0 2
(
(
=
(
(
Potential-Energy Approach
The potential energy of the system, , is given by
T T T T
1
f
2
i i
i
A A L
t d A t dA t d =
D u u u P
(27)
231
T T T T
1
2
i i
L
e e i
e e
t d A t d A t d =
D u f u T u P (28a)
or
T T T
e i i
e e i
e L
U t d A t d =
u f u T u P
(28b)
Element Stiffness
Nowsubstitute for the strain fromthe element strain-displacement relationship in
Eq. 5 into the element strain energy Ue in Eq.28b. to obtain
T
T T
1
2
1
2
e
e
e
U t dA
t dA
=
=
D
q B DBq
(29a)
232
Taking the element thickness te as constant over the element and remembering
that all terms in the Dand B matrices are constants, we have
( )
T T
1
2
t
e e
e
U dA =
q B DB q
(29b)
Now,
e
e
dA A =
, where A
e
is the area of the element. Thus,
T T
1
2 e e e
U t A = q B DBq
(29c)
or
T
1
2
e
e
U = q K q (29d)
233
where K
e
is the element stiffness matrix given by
k
e
= t
e
A
e
B
T
DB
(30)
T
T
1
2
1
2
e
e
U =
q k q
= Q KQ
(31)
Force Terms
The body force term
T
e
t dA
u f
appearing in the total potential energy in Eq. 28
is considered first. We have
T
( v )
e x y
e e
t dA t uf f dA = +
u f
234
Using the interpolation relations given in Eq.12a, we find that
( ) ( )
( ) ( )
( ) ( )
T
1 1 2 1
3 2 4 2
5 3 6 3
e x e y
e e e
e x e y
e e
e x e y
e e
t dA q t f N dA q t f N dA
q t f N dA q t f N dA
q t f N dA q t f N dA
= +
+ +
+ +
u f
(32)
1
e
N dA
1
3
Fromthe definition of shape functions on triangle, shown in Fig.4,
represents the volume of a tetrahedron with base areaA
e
and height of corner
equal to 1 (non dimensional). The volume of this tetrahedron is given by
(Base area) (Height) (Fig.6) as in
1
3 i e
e
N dA A =
(33)
235
Similarly,
1
2 3 3
,
e
e e
N dA N dA A = =
Equation 32 can nowbe written in the form
T T e
e
t dA =
u f q f
(34)
where f
e
is the element body force vector, given as
T
, , , , ,
3
e
e e
x y x y x y
t A
f f f f f f ( =
f
(35)
1 1
1 3 3
1 1 1 1
1
1 1 3
0 0 0 0
. .
det 2 .
e e
e
e e
e
N dA A h A
or N dA N Jd d A d d A
= =
= = =
Fig. 6 Integral of a shape function.
236
1 2
,
x y
T T
Atraction force is a distributed load acting on the surface of the body. Consider
an edge , acted on by a traction in units of force per unit surface area,
shown in Fig. 7a. we have
( )
1 2
T
u v
x y
L
td T T t d
= +
u T
(36)
Using the interpolations relation involving the shape functions
1 1 2 3
1 2 2 4
1 1 2 2
1 1 2 2
u
v
x x x
y y y
N q N q
N q N q
T N T N T
T N T N T
= +
= +
= +
= +
(37)
237
(a) Component distribution (b) Normal pressure
Fig. 7 Traction load.
238
and noting that
1 2 1 2 1 2
2 2
1 1 2 2 1 2 1 2 1 2
2 2
1 2 2 1 2 1
1 1 1
, ,
3 3 6
( ) ( )
N d N d N N d
x x y y
= = =
= +
(38)
we get
| |
1 2
T
1 2 3 4
, , ,
e
t d q q q q
u T T
(39)
where T
e
is given by
1 2
1 2 1 2 1 2 1 2
2 ,2 , 2 , 2
6
T
e e
x x y y x x y y
t
T T T T T T T T
( = + + + +
T
(40)
If p1 and p2 are pressures acting normal to the line directed to the right as we
move from1 to 2, as shown in Fig. 7b, then
1 1 2 2 1 1 2 2
, , ,
x x y y
T cp T cp T sp T sp = = = =
Where
1 2
1 2
( ) x x
s
and
1 2
1 2
( ) y y
c
239
Example 4
A two-dimensional plate is shown in the Fig.E4. Determine the equivalent point
loads at nodes 7, 8, and 9 for the linearly distributed pressure load acting on the
edge 7-8-9.
Fig. E 4
240
Solution We consider the two edges 7-8 and 8-9 separately and then merge them.
For edge 7-8
p
1
=1MPa, p
2
=2MPa, x
1
=100mm, y
1
=20 mm, x
2
=85 mm, y
2
=40mm,
2 2
1 2 1 2 1 2
( ) ( ) 25 x x y y mm
= + =
2 1 1 2
1 2 1 2
0.8, 0.6
y y x x
c s
= = = =
1 1 1 1 2 2
0.8, 0.6, 1.6,
x y x c
T p c T p s T p = = = = = =
| |
1 2
T
1
1 2 1 2 1 2 1 2
T
1.2
10 25
2 ,2 , 2 , 2
6
133.3, 100, 166.7, 125
y
x x y y x x y y
T p s
T T T T T T T T
= =
( = + + + +
=
T
N
241
These loads add to F13, F14, F15, and F16, respectively.
For edge 8-9
p
1
=2MPa, p
2
=3MPa, x
1
=85mm, y
1
=40 mm, x
2
=70 mm, y
2
=60mm,
2 2
1 2 1 2 1 2
( ) ( ) 25 x x y y mm
= + =
2 1 1 2
1 2 1 2
0.8, 0.6
y y x x
c s
= = = =
1 1 1 1 2 2
1.6, 1.2, 2.4,
x y x
T p c T p s T p c = = = = = =
242
These loads ad to F15, F16, F17, and F18, respectively. Thus,
[F13 F14 F15 F16 F17 F18] =[ 133.3 100 400 300 266.7 200] N
| |
2 2
T
2
1 2 1 2 1 2 1 2
T
1.8
10 25
2 ,2 , 2 , 2
6
233.3, 175, 266.7, 200
y
x x y y x x y y
T p s
T T T T T T T T
= =
( = + + + +
=
T
N
Stress Calculations
Since strains are constant in a constant-strain triangle (CST) element, the
corresponding stresses are constant.
= DBq
(41)
243
Example 5
For the two-dimensional loaded plate shown in Fig.E.5,determine the
displacements of nodes 1 and 2 and the element stresses using plane stress
conditions. Body force may be neglected in comparison with the external forces.
Thickness t = 0.5 in.,
E = 30 X 10
6
psi, = 0.25
Fig. E 5
244
Solution
For plane stress conditions, the material property matrix is given by
7 7
7 7
2
7
1 0 3.2X10 0.8X10 0
1 0 0.8X10 3.2X10 0
1
1 0 0 1.2X10
0 0
2
v
E
D v
v
v
(
( (
( (
= =
( (
( (
(
Using the local numbering pattern used in Fig.E3, we establish the connectivity
as follows:
Nodes
Element No. 1 2 3
1 1 2 4
2 3 4 2
245
On performing the matrix multiplication DB
e
, we get
1 7
1.067 0.4 0 0.4 1.067 0
10 0.267 1.6 0 1.6 0.267 0
0.6 0.4 0.6 0 0 0.4
(
(
=
(
(
DB
and
2 7
1.067 0.4 0 0.4 1.067 0
10 0.267 1.6 0 1.6 0.267 0
0.6 0.4 0.6 0 0 0.4
(
(
=
(
(
DB
These two relationships are used later in calculating stresses using e = DB
e
q.
The multiplication
T
e e
e e
t A B DB gives the element stiffness matrices,
246
1 7
1 2 3 4 7 8 Global dof
0.983 0.5 0.45 0.2 0.533 0.3
1.4 0.3 1.2 0.2 0.2
0.45 0 0 0.3
10
1.2 0.2 0
0.533 0
symmetric 0.2
(
(
(
(
=
(
(
(
(
k
2 7
5 6 7 8 3 4 Global dof
0.983 0.5 0.45 0.2 0.533 0.3
1.4 0.3 1.2 0.2 0.2
0.45 0 0 0.3
10
1.2 0.2 0
0.533 0
symmetric 0.2
(
(
(
(
=
(
(
(
(
k
247
1
7
2
3
0.983 0.45 0.2 0
10 0.45 0.983 0 0
0.2 0 1.4 1000
Q
Q
Q
(
(
=
` `
(
(
) )
Solving for Q
1
, Q
3
, and Q
4
, we get
Q
1
=1.913 (10-5) in. Q
3
=0.875 (10-5) in. Q
4
=7.436 (10-5) in.
For element 1, the element nodal displacement vector is given by
q
1
= 10-5 [1.913, 0, 0.0875, 7.436, 0, 0]
T
The element stresses 1 are calculated fromDB
1
q as
1
=[93.3, 1138.7, 62.3]
T
psi
Similarly,
q
2
=10-5 [0, 0, 0, 0, 0.875, 7.436]
T
2 =[93.4, 23.4, 297.4]
T
psi
248
Temperature Effects
If the distribution of the change in temperature T (x, y) is known, the strain due
to this change in temperature can be treated as an initial strain
0
.
T
0
[ , , 0] T T = (42)
for plane stress and
T
0
(1 ) [ , , 0] v T T = +
(43)
The stresses and strains are related by
0
( ) = D
(44)
249
The effect of temperature can be accounted for by considering the strain energy term.
( ) ( )
T
0 0
1
2
U t dA =
D
( )
T T T
0 0 0
1
2
2
t dA = +
D D D
(45)
The first termin the previous expansion gives the stiffness matrix derived earlier.
The last termis a constant, which has no effect on the minimization process. The
middle term, which yields the temperature load, is now considered in detail.
Using the strain displacement relationship , = Bq
T T
0 0
( )
T
e e
A
e
tdA t A =
D q B D
(46)
250
Example 6
Consider the two-dimensional loaded plate shown in Fig.E4. In addition to the
conditions there is an increase in temperature of the plate of 800 F. The
coefficient of linear expansion of the material is 7 x 10-6/
o
F. Determine the
additional displacements due to temperature. Also, calculate the stresses in
element 1.
Solution
We have
6 o 0
7X10 / F and 80 F. So T
= =
4
0
5.6
10 5.6
0 0
T
T
( (
( (
=
( (
( (
251
Thickness t equals 0.5, and the area of the element A is 3 in2. The element
temperature loads are
1 1 T
0
( ) t A = DB
where DB
1
is calculated in the solution. On evaluation, we get
| |
T
1 T
( ) 11206 16800 0 16800 11206 0 =
with associated dofs 1, 2, 3, 4, 7, 8, and
| |
T
2 T
( ) 11206 16800 0 16800 11206 0 =
with associated dofs 5, 6, 7, 8, 3, and 4.
252
Picking the forces for dofs 1, 3, and 4 fromthe previous equations, we have
| | | |
T
1 3 4
11206 11206 16800 F F F = = F
On solving KQ = F, we get
| |
3 3 3
1 3 4
1.862x10 1.992x10 0.934x10 in Q Q Q
( =
The displacements of element 1 due to temperature are
T
1 3 4 3
1.862x10 0 1.992x10 0.934x10 0 0
( =
q
The stresses are calculated as
1 1 T 1
0
( ) = DB q D
253
On substituting for the terms on the right-hand side, we get
| |
T
1 4
10 1.204 2.484 0.78 psi =
We note that the displacements and stresses just calculated are due to
temperature change.
Fig. 8 Rectangular plate.
254
Fig. 9 Octagonal pipe.
Fig. 10 Inclined roller Support.
255
Q2i moves along n as seen in Fig.10 and is the angle of inclination of n with
respect to x-axis, we have
2 1 2
sin cos 0
i i
Q Q
=
(47)
This boundary condition is seen to be a multipoint constraint. Using the penalty
approach presented this amounts to adding a termto the potential energy as in
T T 2
2 1 2
1 1
( sin cos )
2 2
i i
C Q Q
= + Q KQ Q F
(48)
where C is a large number.
The squared termin Eq.48 can be written in the from
2
2 1 2
1 1
2 1 2 2 1 2 2 2
2
2
sin sin cos
( sin cos ) [ , ]
sin cos cos
i
i i i i
i
Q
C C
C Q Q Q Q
Q
C C
(
=
` (
)
(49)
The terms
2
sin C
sin cos C , and
2
cos C get added to the global stiffness
matrix.
256
Orthotropic Materials
Denote 1, 2, and 3 as the principal material axes that are normal to the planes of
symmetry. The generalized Hookes law as referred to coordinate system 1,2,3
can be written as *
31 21
1 1 2 3 23 23
1 2 3 23
32 12
2 1 2 3 13 13
1 2 3 13
13 23
3 1 2 3 12 12
1 2 3 12
1 1
,
1 1
,
1 1
,
v v
E E E G
v v
E E E G
v v
E E E G
= =
= + =
= + =
(50)
257
Where E
1
, E
2
, and E
3
are the Youngs moduli along the principal material axes
and G
23
, G
13
, and G
12
are the shear moduli that characterize changes of angles
between principal directions 2 and 3, 1 and 3, and 1 and 2, respectively. Due to
symmetry of Eqs.50, the following relations obtain:
1 21 2 12 2 32 3 23 3 13 1 31
, , , E v E v E v E v E v E v = = = (51)
Neglecting the z-component stresses
21 12
1 1 2 2 1 2 12 12
1 2 1 2 12
1 1 1
, ,
E E E E G
= = + = (52)
These equations can be inverted to express stress in terms of strain as
258
1 1 21
12 21 12 21
1 1
2 12 2
2 2
12 21 12 21
12 12
12
0
1 1
0
1 1
0 0
E E v
v v v v
E v E
v v v v
G
(
(
(
(
=
` `
(
(
) )
(
(
(53)
D
m
is symmetric since E
1
v
21
=E
2
v
12
.
Atransformation matrix T is introduced as
2 2
2 2
2 2
cos sin 2sin cos
sin cos 2sin cos
sin cos sin cos cos sin
T
(
(
=
(
(
(54)
259
The relations between the stresses (strains) in the material coordinate system
and the global coordinate systemare
1 1
2 2
1 1
12 12 2 2
,
x x
y y
xy xy
= =
` ` ` `
) )
) )
T T
(55)
Fig. 11 Orientation of material axes with respect to global axes; is the
counterclockwise angle from x-axis. Note: = 330o is equivalent to = 30o.
260
The important relation we need is the D matrix, which relates stress and strain in
the global systemas
11 12 13
12 22 23
13 23 33
x x
y y
xy xy
D D D
D D D
D D D
(
(
=
` `
(
(
) )
(56)
It can be shown* that the D matrix is related to the Dmmatrix as
4 2 2 4
11 11 12 33 22
2 2 4 4
12 11 22 33 12
3 3
13 11 12 33 12 22 33
4 2 2 4
22 11 12 33 22
cos 2( )sin cos sin
( 4 )sin cos (sin cos )
( 2 )sin cos ( 2 )sin cos
sin 2( 2 )sin cos cos
m m m m
m m m m
m m m m m m
m m m m
D D D D D
D D D D D
D D D D D D D
D D D D D
D
= + + +
= + + +
= + +
= + + +
3 3
23 11 12 33 12 22 33
2 2 4 4
33 11 22 12 33 33
( 2 )sin cos ( 2 )sin cos
( 2 2 )sin cos (sin cos )
m m m m m m
m m m m m
D D D D D D
D D D D D D
= + +
= + + +
(57)
261
Axisymmetric solids subjected to Axisymmetric Loading
INTRODUCTION:
Problem involving three-dimensional axisymmetric solids or solids of
revolution, subjected to axisymmetric loading, reduce to simple two-
dimensional problems. Because of total symmetry (geometry and load)
about the z-axis, as seen in Fig.1, all deformations and stresses are
independent of the rotational angle . Thus, the problemneeds to be looked
at as a two dimensional problem in rz, defined on the revolving area
(Fig.1b). Gravity forces can be considered if acting in the z direction.
Revolving bodies like flywheels can be analyzed by introducing centrifugal
forces in the body force term.
262
(a) (b)
Fig.1 Axisymmetric problem
263
AXISYMMETRIC FORMULATION
Considering the elemental volume shown in Fig.2, the potential energy can be
written in the form
2 2 2
T T T T
0 0 0
1
2
i i
A A A
i
r d Ad r d Ad r d d
=
u f u T u P
(1)
where r d d is the elemental surface area and the point load P
i
represents a
line load distributed around a circle, as shown in Fig.1
All variables in the integrals are independent of . Thus, Eq.1 can be written as
T T T T
1
2
2
r i i
A A L
i
r dA r dA d
| |
=
|
\ .
u f u T u P
(2)
264
where
| |
T
, u w = u
| |
T
,
r z
f f = f
| |
T
,
r z
T T = T
(3)
(4)
(5)
We can write the relationship between strains and displacements u as
| |
T
, , ,
r z rz
=
265
T
w w
, , ,
u u u
r z z r r
(
= +
(
(6)
The stress vector is correspondingly defined as
T
,
, ,
r z rz
( =
(7)
The stress-strain relations are given in the usual form
= D
(8)
266
Fig.2 Elemental Volume
267
Fig.3 Deformation of elemental volume.
268
( )
( )( )
( )
1 0
1 1
1 0
1 1 1
1 2
1 1 2
0 0 0
2 1
0 1
1 1
v v
v v
v v
E v v v
v
v v
v
v v
v v
(
(
(
(
(
=
(
+
(
(
(
(
(
D
(9)
269
FINITE ELEMENT MODELING: TRIANGULAR ELEMENT
Using the three shape functions N
1
, N
2
, and N
3
, we define
u = Nq (10)
where u is defined in Eqn. 3 and
1 2 3
1 2 3
0 0 0
0 0 0
N N N
N N N
(
=
(
N
(11)
270
If we denote N
1
= , and note that N
3
= 1, then Eq.10 gives
( )
( )
1 3 5
2 4 6
1
1
u q q q
w q q q
= + +
= + +
(13)
| |
T
1 2 3 4 5 6
, , , , , q q q q q q = q (12)
271
Fig.4 Triangulation
272
Fig.5 Axisymmetric triangular element
273
By using the isoparametric representation, we find
( )
( )
1 2 3
1 2 3
1
1
r r r r
z z z z
= + +
= + +
(14)
The chain rule of differentiation gives
u
u
r
u u
z
=
` `
)
)
J
(15)
274
and
w
w
r
w w
z
=
` `
)
)
J
(16)
where the J acobian is given by
13 13
23 23
r r
r r
(
=
(
J
(17)
275
In the definition of J earlier, we have used the notation r
ij
=r
i
r
j
and z
ij
=z
i
z
j
.
The determinant of J is
det J = r
13
z
23
r
23
z
13
(18)
Recall that
det 2
e
A = J
That is, the absolute value of the determinant of J equals
twice the area of the element. The inverse relations for Eqs.15 and 16
are given by
1 1
and
u w
u w
r r
u u w w
z z
= =
` ` ` `
) )
) )
J J
(19)
276
where
23 13 1
23 13
1
det
z z
r z
(
=
(
J
J
(20)
( ) ( )
( ) ( )
( ) ( ) ( ) ( )
23 1 5 13 3 5
23 2 6 13 4 6
23 2 6 13 3 5 23 2 6 13 4 6
1 1 2 3 3 5
det
det
det
z q q z q q
r q q r q q
r q q r q q z q q z q q
N q N q N q
r
+
=
`
+ +
+ +
)
J
J
J
277
This can be written in the matrix form as
= Bq
(21)
where the element strain-displacement matrix, of dimension (4 x 6), is given by
23 31 12
32 13 21
32 23 13 31 21 12
3 1 2
0 0 0
det det det
0 0 0
det det det
det det det det det det
0 0 0
z z z
r r r
r z r z r z
N N N
r r r
(
(
(
(
(
=
(
(
(
(
(
J J J
J J J
B
J J J J J J
(22)
278
Potential- Energy Approach
The potential energy on the discritized region is given by
( )
T T T
1
2 2 2
2
e e e
e
r dA r dA r d
(
=
(
D u f u T
T
i i
u P
(23)
The element strain energy Ue given by the first term can be written as
( )
T T
1
2
2
e
e
U r dA =
q B DB q (24)
The quantity inside the parentheses is the element stiffness matrix,
T
2
e
e
r dA =
k B DB
(25)
1
1 2 3 3
N N N = = =
(26)
and
1 2 3
3
r r r
r
+ +
=
r B
Where is the radius of the centroid. Denoting as the element strain
displacement matrix B evaluated at the centroid, we get
279
T
2
e
e
r dA =
k B DB
or
T
2
e
e
rA = k B DB
(27)
1
2
det
e
A = J
(28)
Body Force Term
We first consider the body force term
T
2 .
e
r dA
u f
We have
T
2 2 ( )
r z
e e
r dA uf wf r dA = +
u f
1 1 2 3 3 5 1 2 2 4 3 6
2 [( ) ( ) ]
r z
e
N q N q N q f N q N q N q f r d A = + + + + +
T T
2
e
e
r dA =
u f q f
(29)
T
2
, , , , , ,
3
e
e
r z r z r z
rA
f f f f f f
( =
f
(30)
280
Rotating Flywheel
| |
T
T 2
, ,
r z
f f r g ( = =
f
(31)
and
2
,
r z
f r f g = =
(32)
281
Surface Traction
T T
2
e
e
r d =
u T q T
(33)
Fig.6 surface traction
282
where
T
1 2 3 4
[ , , , ] q q q q = q
(34)
T
1 2
2 [ , , , ]
e
r z r z
aT aT bT bT
= T
(35)
1 2 1 2
2 2
6 6
r r r r
a b
+ +
= =
(36)
( ) ( )
2 2
1 2 2 1 2 1
r r z z
= +
(37)
283
Example 1
An axisymmetric body with a linearly distributed load on the conical surface is
shown in Fig. 7. Determine the equivalent point loads at nodes 2, 4, and 6.
Fig.E1
284
Solution
We approximate the linearly distributed load by the average uniformly
distributed loads on the edges 6 4 and 4 2 as shown in Fig. 7.
For edge 6 4
p = 0.35 MPa, r1 = 60 mm, z1, = 40 mm, r2 = 40 mm, z2 = 55 mm
( ) ( )
| |
| |
2 2
1 2 1 2 1 2
2 1 1 2
1 2 1 2
1 2 1 2
1 T
1 2
T
25mm
z
c= 0.6, 0.8
0.21, 0.28
2 2
26.67, 23.33
6 6
2
879.65 1172.9 769.69 1026.25 N
r z
r z r z
r r z z
z r r
s
T pc T ps
r r r r
a b
aT aT bT bT
= + =
= = =
= = = =
+ +
= = = =
=
=
T
These loads add to F11, F12, F7, and F8, respectively.
285
For edge 4 2
p = 0.25 MPa, r1 = 40 mm, z1, = 55 mm, r2 = 20 mm, z2 = 70 mm
( ) ( )
| |
| |
2 2
1 2 1 2 1 2
2 1 1 2
1 2 1 2
1 2 1 2
1 T
1 2
T
25mm
z
c= 0.6, 0.8
0.15, 0.2
2 2
16.67, 13.33
6 6
2
392.7 523.6 314.16 418.88 N
r z
r z r z
r r z z
z r r
s
T pc T ps
r r r r
a b
aT aT bT bT
= + =
= = =
= = = =
+ +
= = = =
=
=
T
These loads add to F7, F8, F3, and F4, respectively. Thus,
| | | |
3 4 7 8 11 12
314.2 418.9 1162.4 1696.5 879.7 1172.9 N F F F F F F =
286
Example 2
In Fig. E2, a long cylinder of inside diameter 80 mmand outside diameter 120
mmsnugly fits in a hole over its full length. The cylinder is then subjected to an
internal pressure of 2 MPa. Using two elements on the 10-mmlength shown,
find the displacements at the inner radius.
Fig.E2
287
Solution
Consider the following table:
Connectivity
Element 1 2 3
1 1 2 4
2 2 3 4
Coordinates
Node r z
1 40 10
2 40 0
3 60 0
4 60 10
We will use the units of millimeters for length, newtons for force, and megapascals
for stress and E. these units are consistent. On substituting E =200 000 MPa and
v =0.3, we have
288
5 5 5
5 5 5
5
5 5 5
2.69(10 ) 1.15(10 ) 0 1.15(10 )
1.15(10 ) 2.69(10 ) 0 1.15(10 )
0 0 0.77(10 ) 0
1.15(10 ) 1.15(10 ) 0 2.69(10 )
(
(
(
=
(
(
D
for the both elements, det J = 200mm
2
and Ae=100mm
2
. From Eq.28,
forces F
1
and F
3
are given by
1
1 3
2 2 (40)(10)(2)
2514N
2 2
e i
r P
F F
= = = =
The B matrices relating element strains to nodal displacement are obtained
first. For element 1,
1
3
(40 40 60) 46.67mm r = + + = and
289
1
0.05 0 0 0 0.05 0
0 0.1 0 0.1 0 0
0.1 0.05 0.1 0 0 0.05
0.0071 0 0.0071 0 0.0071 0
(
(
(
=
(
(
B
For element 2,
1
3
(40 40 60) 53.33mm r = + + =
2
0.05 0 0 0 0 0
0 0 0 0.1 0 0.1
0.1 0.05 0.1 0.05 0.1 0
0.00625 0 0.00625 0 0.00625 0
(
(
(
=
(
(
B
290
The element stress-displacement matrices are obtained by multiplying DB:
1 4
1.26 1.15 0.082 1.15 1.43 0
0.49 2.69 0.082 2.69 0.657 0.1
10
0.77 0.385 0.77 0 0 0.385
0.384 1.15 0.191 1.15 0.766 0
(
(
(
=
(
(
DB
2 4
1.27 0 1.42 1.15 0.072 1.15
0.503 0 0.647 2.69 0.072 2.69
10
0 0.385 0.77 0.385 0.77 0
0.407 0 0.743 1.15 0.168 1.15
(
(
(
=
(
(
DB
The stiffness matrices are obtained by finding
T
2
e
rA B DB
for each element:
291
1 7
Global 1 2 3 4 7 8
4.03 2.58 2.34 1.45 1.932 1.13
8.45 1.37 7.89 1.93 0.565
2.30 0.24 0.16 1.13
10
7.89 1.93 0
2.25 0
symmetric 0.565
(
(
(
(
=
(
(
(
(
k
2 7
Global dof 3 4 5 6 7 8
2.05 0 2.22 1.69 0.085 1.69
0.645 1.29 0.645 1.29 0
5.11 3.46 2.42 2.17
10
9.66 1.05 9.01
2.62 0.241
symmetric 9.01
(
(
(
(
=
(
(
(
(
k
292
Using the elimination approach, on assembling the matrices with reference to the
degrees of freedom1 and 3, we get
1 7
2
4.03 2.34 2514
10
2.34 4.35 2514
Q
Q
(
= =
` `
(
) )
so that
2
1
2
3
0.014 10 mm
0.0133 10 mm
Q
Q
=
=
293
Stress Calculations
From the set of nodal displacements obtained above, the element nodal
displacements q can be found using the connectivity. Then, using stress-strain
relation in Eq.8 and strain displacement relation in Eq. 21, we have
= DBq
(38)
where Bis B, given in Eq.22, evaluated at the element at the centroid of the
element. We also note that
is a principal stress Two principal stresses
1
and
2
corresponding to
r
,
z
, and can be calculated using Mohrs circle.
rz
294
Example 3
Calculate the element stresses in the problemdiscussed in Example 2
Solution We need to find for each element. From the
connectivity established in Example2.
| |
, , ,
T
e
e
r z rz
=
| |
| |
T
1 2
T
2 2
0.0140, 0, 0.0133, 0, 0, 0 10
0.0133, 0, 0, 0, 0, 0 10
=
=
q
q
Using the product matrices DBe and q in the formula
e e
= DB q
we get
| |
| |
T
1 2
T
2 2
166, 58.2, 5.4, 28.4 10 MPa
169.3, 66.9, 0, 54.1 10 MPa
=
=
295
Temperature Effects
Uniformincrease in temperature of T introduces initial normal strains
0
given as
| |
T
0
, , 0, T T T =
(39)
The stresses are given by
( )
0
D =
(40)
where
is the total strain.
296
On substitution into the strain energy, this yields an additional term of
T
0
D
in the potential energy . Using the element strain-displacement relations in
Eq.21, we find that
( )
T T
0 0
2 2 B
T
e
A
e
r dA r A =
D q D
(41)
0
2
e T
e
r A = B D
(42)
T
1 2 3 4 5 6
[ , , , , , ]
e
=
(43)
297
Press Fit on an Elastic Shaft
We may define pairs of nodes on the contacting boundary, each pair consisting
of one node on the sleeve and one on the shaft. If Q
i
and Q
j
are displacements
of a typical pair along the radial degrees of freedom, we need to satisfy the
multipoint constraint
j i
Q Q =
(44)
Fig. 7 Elastic sleeve on an elastic shaft.
298
When the term
2
1
2
( )
j i
C Q Q
is added to the potential energy, the constraint
is approximately enforced.
2 2 2
1 1 1 1
2 2 2 2
2
1
2
( ) ( )
j i i j i j j i
i j
C Q Q CQ CQ C QQ Q Q
CQ CQ C
= + +
+ +
(45)
This implies the following modifications:
ii ij ii ij
ji jj ji jj
K K K C K C
K K K C K C
+
( (
( (
+
(46)
and
i i
j j
F F C
F F C
( (
( (
+
(47)
299
Belleville Spring
The Belleville spring, also called the Belleville washer, is a conical disk spring.
The load is applied on the periphery of the circle and supported at the bottom
as shown in Fig. 8a. As load is applied in the axial direction, the supporting
edge moves out. Only the rectangular area shown shaded in Fig. 8c needs to
be modeled. An axisymmetric load P is placed at the top corner, and the
bottomsupporting corner is constrained in the x direction. Load deflection
characteristics and stress distribution can be obtained by dividing the area into
elements and using a computer program. In the Belleville spring, the load
deflection curve is nonlinear (Fig. 8b). The stiffness depends on the geometry.
We can find a good approximate solution by an incremental approach. We find
the stiffness matrix K (x) for the given coordinate geometry. We obtain the
displacements Q for an incremental loading of F from
K (x) Q = F (48)
300
(b) (c)
Fig. 8 Belleville spring.
301
The displacements Q are converted to the components u and w and are
added to x to update the newgeometry:
+ x x u
(49)
K is recalculated for the new geometry, and the new set of equations 48 is
solved. The process is continued until the full applied load is reached.
302
Two-Dimensional Isoparametric Elements and Numerical Integration
The Four-Node Quadrilateral
Consider the general quadrilateral element shown in Fig. 1. The local nodes are
numbered as 1, 2, 3, and 4 in a counterclockwise fashion as shown, and (xi, yi)
are the coordinates of node i. The vector q =[q1, q2, , q8] T denotes the
element displacement vector. The displacement of an interior point P located at
(x, y) is represented as u =[u (x, y), v (x, y)] T.
Shape Functions
The Lagrange shape functions where i =1, 2, 3, and 4, are defined such that Ni is
equal to unity i and is zero at other nodes. In particular, consider the definition of
Ni:
N1 = 1 at node 1
= 0 at nodes 2, 3, and 4 (1)
303
Fig. 1 Four-node quadrilateral element
Fig. 2 The quadrilateral element in , space (the master element)
304
Now, the requirement that N
1
=0 at nodes 2, 3, and 4 is equivalent to requiring
that N
1
=0 along edges =+1and =+1 (Fig. 2). Thus, N
1
has to be of the form
N
1
= c (1 - ) (1 - ) (2)
where c is some constant. The constant is determined fromthe condition N1 =1
at node 1. Since =-1, =-1 at node 1, we have
1 = c (2) (2)
(3)
which yields c =. Thus,
1
1 4
(1 ) (1 ) N =
(4)
305
All the four shape functions can be written as
( )( )
( )( )
( )( )
( )( )
1
1 4
1
2 4
1
3 4
1
4 4
1 1
1 1
1 1
1 1
N
N
N
N
=
= +
= + +
= +
(5)
While implementing in a computer program, the compact representation of Eqs. 5
is useful
1
4
(1 ) (1 )
i i i
N = + +
(6)
where (i, i) are the coordinates of node i.
1 1 2 3 3 5 4 7
u N q N q N q N q = + + +
1 2 2 4 3 6 4 8
N q N q N q N q = + + + (7)
306
which can be written in matrix form as
u = Nq
where
1 2 3 4
1 2 3 4
0 0 0 0
0 0 0 0
N N N N
N N N N
(
=
(
N
(8)
In the isoparametric formulation, we use the same shape function N
i
to also
express the coordinates of a point within the element in terms of nodal
coordinates. Thus,
1 1 2 2 3 3 4 4
x N x N x N x N x = + + +
1 1 2 2 3 3 4 4
y N y N y N y N y = + + +
(9)
307
f f x f y
x y
= +
f f x f y
x y
= +
(10)
or
f
f
x
f
f
y
=
` `
)
)
J
(11)
where J is the J acobian matrix
x y
x y
`
)
J =
(12)
308
In view of Eqs. 5 and 9, we have
1 2 3 4 1 2 3 4
1 2 3 4 1 2 3 4
1(1 ) 1(1 ) 1(1 ) 1(1 ) 1(1 ) 1(1 ) 1(1 ) 1(1 )
1
1(1 ) 1(1 ) 1(1 ) 1(1 ) 1(1 ) 1(1 ) 1(1 ) 1(1 ) 4
x x x x y y y y
J
x x x x y y y y
+ + + + + + + + + (
=
(
+ + + + + + + +
(13a)
11 12
21 22
J J
J J
(
=
(
(13b)
Equation 11 can be inverted as
1
f
f
x
f
f
y
=
` `
)
)
J
(14a)
or
309
22 12
21 11
1
det
f
f
J J
x
f
J J f
y
(
=
` `
(
)
)
J
(14b)
These expressions will be used in the derivation of the element stiffness matrix.
An additional result that will be needed is the relation
det dx dy d d = J (15)
310
T
1
2
V
dV =
U
(16)
or
T
1
2 e
e
e
t dA =
U
(17)
Where t
e
is the thickness of element e.
The strain displacement relations are
v
v
x
y
xt
u
x
y
u
y x
= =
` `
)
+
)
(18)
Element Stiffness Matrix
The stiffness matrix for the quadrilateral element can be derived fromthe strain
energy in the body, given by
311
By considering f u in Eq. 14b, we have
22 12
21 11
1
det
u
u
J J
x
u
J J u
y
(
=
` `
(
)
)
J
(19a)
Similarly,
22 12
21 11
v
1
v det
v
J J
x
v
J J
y
(
=
` `
(
)
)
J
(19b)
312
Equations 18 and 19a, b yield
v
v
u
u
=
`
)
A
(20)
where A is given by
22 12
21 11
21 11 22 12
0 0
1
0 0
J J
J J
jet
J J J J
(
(
=
(
(
A
J
(21)
313
Now, from the interpolation equations Eqs. 7a, we have
v
v
u
u
=
`
)
Gq
(22)
where
(1 ) 0 (1 ) 0 (1 ) 0 (1 ) 0
(1 ) 0 (1 ) 0 (1 ) 0 (1 ) 0
1
0 (1 ) 0 (1 ) 0 (1 ) 0 (1 ) 4
0 (1 ) 0 (1 ) 0 (1 ) 0 (1 )
+ +
(
(
+ +
(
=
( + +
(
+ +
G
(23)
314
Equations 20 and 22 now yield
=Bq
(24)
where
B = AG (25)
The relation
=Bq
is the desired result. The strain in the element in Eq. 17 becomes
1 1
T T
1
2
1 1
det
e
e
t d d
(
=
(
q B DB J q U
(27a)
T e
1
2
e
=
q k q
(27b)
where
1 1
T
1 1
det
e
e
t d d
=
k B DB J
(28)
315
Element Force Vectors
Body Force A body force that is distributed force per unit volume, contributes to
the global load vector F. This contribution can be determined by considering the
body force termin the potential-energy expression
T
V
dV
u f
(29)
T T e
V
e
dV =
u f q f
(30)
1 1
T
1 1
det
x
e
e
y
f
t d d
f
(
=
`
(
)
f N J
(31)
316
Three dimensional problems
| |
, ,
T
u v w = u
, , , , ,
, , , , ,
T
x y z yz xz xy
T
x y z yz xz xy
( =
( =
u=displacement in x-direction
v=displacement in y-direction
w=displacement in z-direction
The stresses and strains are given by
Prof .N. Siva Prasad, Indian Institute of Technology Madras
The deformation of a point in a body under forces is given by
where
317
The strain-displacement relations are given by
, , , , ,
T
u v w v w u w u v
x y z z y z x y x
(
= + + +
(
, ,
, ,
T
x y z
T
x y z
f f f
T T T
( =
( =
f
T
The body forces and traction vectors are given by
Prof .N. Siva Prasad, Indian Institute of Technology Madras
1 0 0 0
1 0 0 0
1 0 0 0
0 0 0 0.5 0 0
(1 )(1 2 )
0
E
=
+
D
0 0 0 0.5 0
0 0 0 0 0 0 . 5
(
(
(
(
(
(
(
(
(
= D The stress-strain relations are given by
where
Three dimensional problems contd..
318
Four noded tetrahedral element
Thus, the element local and global displacements
| |
| |
1 2 3 12
1 2 3
, , ,......,
, , ,......,
T
T
N
q q q q
Q Q Q Q
=
=
q
Q
N is the total number of degrees of freedom for the structure, 3 per node
Prof .N. Siva Prasad, Indian Institute of Technology Madras
x
y
z
o
Three dimensional problems contd..
319
Using the master element shown in figure below, we can define
the shape functions as
1 2 3 4
1 N N N N = = = =
1 2 3 4
1 2 3 4
1 2 3
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
N N N N
N N N N
N N N
= N
4
N
(
(
(
(
= u Nq
The displacements u, v and w at x can be written in terms of the unknown nodal
values as
4(0,0,0)
1(1,0,0)
2(0,1,0)
3(0,0,1)
Prof .N. Siva Prasad, Indian Institute of Technology Madras
where
Three dimensional problems contd..
320
The isoparametric transformation is given by
1 1 2 2 3 3 4 4
1 1 2 2 3 3 4 4
1 1 2 2 3 3 4 4
x N x N x N x N x
y N y N y N y N y
z N z N z N z N z
= + + +
= + + +
= + + +
u
u
x
u u
y
u u
z
=
` `
)
)
J
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Using chain rule for partial derivatives, say of u, we have
Three dimensional problems contd..
321
volume of the element given by
1 1 1
0 0 0
1
det det
6
e
V d d d
= =
J J
u
u
x
u u
y
u u
z
=
` `
)
)
A
Prof .N. Siva Prasad, Indian Institute of Technology Madras
We can write the following relation
14 14 14
24 24 24
34 34 34
x y z
x y z
x y z
x y z
x y z
x y z
(
(
(
(
(
(
= =
(
(
(
(
(
(
J
The J acobian of the transformation is given by
14 1 4
x x x =
here
Three dimensional problems contd..
322
V
e
is the volume of the element
e T
e
k V = B DB
here element stiffness matrix, k
e
is
given by
1 1
2 2
1 1
2 2
T T T
e
e e
T T T e
e
U dV dV
V k
= =
= =
D q B DBq
q B DBq q q
Element Stiffness
Prof .N. Siva Prasad, Indian Institute of Technology Madras
The element strain energy in the total potential is given by
Three dimensional problems contd..
323
Force Terms
The potential term associated with body force is
det
T T T
e
T e
dV d d d =
=
u f q N f J
q f
, , , , , ,.......,
4
T
e
e
x y z x y z z
V
f f f f f f f ( =
f
Consider uniformly distributed traction on the boundary surface
Prof .N. Siva Prasad, Indian Institute of Technology Madras
T T T T e
A A
e e
dA dA = =
u T q N T q T
Three dimensional problems contd..
324
Dynamic analysis
When loads are suddenly applied,
The mass and acceleration effects are come in to picture
Lagrangian
L T = T Kinetic energy
Potential energy
Hamilton Princible
For an arbitrary time interval from t1 to t2,the state of motion of a body extremize
functional
2
1
t
t
I Ldt =
If L can be expressed in terms of the generalized variables
1 2 3 4
, , , ,..... ,
n
q q q q q
where
i
i
q
q
t
Then the equations of motions are given by
0
i i
d L L
dt q q
| |
=
|
\ .
i=1 to n
Prof .N. Siva Prasad, Indian Institute of Technology Madras
325
1 1
, x x
2 2
, x x
m2
m1
The kinetic energy and potentially energy are given by
2 2
1 1 2 2
2 2
1 1 2 2
1 1
2 2
1 1
2 2
T m x m x
k x k x
= +
= +
Using and
L T =
0
i i
d L L
dt q q
| |
=
|
\ .
i=1 to n
The equations of motions will be
1 1 1 1 2 2 1
1
1
2 2 2 2 1
2
2
( ) 0
( ) 0
d L L
m x k x k x x
dt x
x
d L L
m x k x x
dt x
x
| |
|
= + =
|
\ .
| |
|
= + =
|
\ .
In matrix form
1 1 1 2 2 1
2 2 2 2
2
0 ( )
0
0
m x k k k x
m k k x
x
+
( (
+ =
` `
( (
)
)
Spring mass system
Stiffness matrix
Mass matrix
Dynamic analysis contd..
326
Systems with Distributed mass
x
z
y
u
v
w
dv
= density
v
The kinetic energy
The velocity vector of point at x with components
In the finite element method,we divide the body
into elements,and in each element
and
1
2
T
v
T u u dv
=
, , u v w
u Nq =
u N q
=
The kinetic energy T
e
1
2
1
2
T
v
T
v
T u u dv
T q N Ndv q
=
(
=
(
Mass matrix
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Dynamic analysis contd..
327
Types of Elements
One dimensional elements
1. Beam (axial)
2. Beam (bending)
3. Pipe
Prof .N. Siva Prasad, Indian Institute of Technology Madras
328
Two dimensional elements
1. Triangular
inplane
bending
2. quadrilateral
inplane
bending
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Types of Elements
329
Three dimensional elements
1. brick
2. Tetrahedral
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Types of Elements
330
Finite element analysis
Guidelines for the selection of FE package:
Analysis Capability
Adequacy of user oriented features
Maintainability
Adequacy of user support facility
Portability
Prof .N. Siva Prasad, Indian Institute of Technology Madras
331
Modeling
Element type must be consistent
Finer mesh near the stress gradient
Extremely fine mesh when forces to be applied near the stress
concentration areas such as fillets
Uniform change in stress between adjacent elements
Better aspect ratio
Prof .N. Siva Prasad, Indian Institute of Technology Madras
332
Modeling (contd)
Gross element distortion should be avoided
Adjoining elements must share common nodes and common
degrees of freedom
45
0
15
0
Prof .N. Siva Prasad, Indian Institute of Technology Madras
333
Debugging of FE models
Geometry
Material properties
Applied forces
Displacement constraints
Prof .N. Siva Prasad, Indian Institute of Technology Madras
334
Common symptoms and their possible causes
Symptoms Causes
Excessive deflection, but
anticipate stress
Excessive deflection and
excessive stress
Internal discontinuity in stress and
deflection
Youngs modulus too low,
missing nodal constraints
Applied force too high,
nodal coordinates incorrect,
force applied at wrong nodes
Force applied at wrong nodes,
missing or double internal element
Prof .N. Siva Prasad, Indian Institute of Technology Madras
335
Symptoms Causes
Discontinuity along boundary
Higher or lower frequency than
anticipated
-Static deflections, O.K.
-Static deflection not O.K.
Internal gap opening up in model
under load, stress discontinuity
Missing nodal constraint,
force applied at wrong node
Density incorrect
Youngs modulus incorrect
Improper nodal coupling
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Common symptoms and their possible causes
336
Dynamic analysis
Modal analysis - Natural frequency and mode shapes
Harmonic analysis - Forced response of system to a sinusoidal
forcing
Transient analysis - Forced response for non-harmonic loads
(impact, step or ramp forcing etc.)
Prof .N. Siva Prasad, Indian Institute of Technology Madras
337
Substructure
Rules for substructure
A substructure may be generated from individual elements or other
substructures
Master nodes to be retained to be identified
Nodal constraints will be retained in all subsequent uses of the
substructure
Along a substructure boundary that will be used for connection to
the rest of the global model, all nodes must be retained as master
nodes
Cost effective
Prof .N. Siva Prasad, Indian Institute of Technology Madras
338
Guidelines for selection of dynamic degree of
freedom (DDOF)
No. of the DOF must be 2 times highest mode of interest
No. of reduced modes will be equal to the number of DDOF so that
only bottom half of the calculated modes should be considered
accurate
DDOF should be placed in areas of large mass and rigidity
DDOF should be distributed in such a way as to anticipate mode
shapes
DDOF be selected at each point of dynamic force application
DDOF must be used with gap elements
For plate type elements emphasise DDOF in out of plane direction
Prof .N. Siva Prasad, Indian Institute of Technology Madras
339
Discretization of Structure
Concentrated load
.
node
P
Abrupt change in load
.
node
Abrupt change in thickness
.
node
Prof .N. Siva Prasad, Indian Institute of Technology Madras
340
Discretization of Structure
Abrupt change in material properties
Re entrant corner
.
Finer mesh near stress concentration factor
Nodal line
node
Prof .N. Siva Prasad, Indian Institute of Technology Madras
341
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Gasketed Flange J oint
342
Finite element mesh of bolted flange
joint with spiral-wound gasket
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Gasketed Flange J oint
343
Finite Element Analysis of Bolted Flanged J oints
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Gasketed Flange J oint
344
Longitudinal stress distribution on hub and flange
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Gasketed Flange J oint
345
CONICAL HOPPER WITH STIFFENERS FOR
ELECTROSTATIC PRECIPITATOR
346
Result plots for pyramidal hopper flue gas
Plates
Fig.6 von Mises stress in pyramidal hopper due to flue
gas pressure
347
contd....Result plots for pyramidal hopper flue gas
Beams
Fig. 7 a) Min stress (axial + bending) b) Max stress (axial + bending) in beams
for pyramidal hopper due to flue gas
348 348
To validate the data obtained from experiments a 3D FEA is
carried out using ANSYS software on composite-aluminum and
composite-composite single bolted joint model to check for ply
failures using Hashin failure criteria.
This criteria is easy for implementing in progressive damage of
layers as it can differentiate between failure modes.
Fig 2. Finite element mesh model for single bolt joint
349 349
Angle of J oggle constant Thickness varying
Fig 14. Double J oggle Single Lap J oint(DJ SLJ )
Composite
laminate
adhesive
350
S1 and S3 nodal principal stress in adhesive at 0.2 mm thickness
DYNAMIC ANALYSIS OF TURRET
FIG. 1 3D TURRET AND GUN MODEL IN I-DEAS
352
FINITE ELEMENT MODEL
ELEMENT:
10 NODE
TETRAHEDRAL
STRUCTURAL S0LID 92
TOTAL NUMBER OF
ELEMENTS:
185000
TOTAL NUMBER OF
NODES:
332000
FIG. 2 FINITE ELEMENT MODEL IN ANSYS
353
MODAL ANAYSIS
First Mode shape
Natural Frequency: 17.7 Hz
Second Mode shape
Natural Frequency: 19.7 Hz
Loss of Stiffness of Top and Bottom plates Because of cut outs
FIG. 3 MODE SHAPE AND NATURAL FREQUENCY
354
GEOMETRICAL MODIFICATIONS
Ribs on the top plate
Ribs on the bottom plate
FIG. 4 RIBS ON THE TOP AND BOTTOM PLATE
RIB DIMENSIONS
C-CHANNEL
THICKNESS 3 mm
WIDTH 60 mm
355
MODAL ANALYSIS AFTER MODIFICATIONS
Second Mode shape
Natural Frequency: 34.7 Hz
First Mode shape
Natural Frequency: 30.3 Hz
Stiffness Improved of Top and Bottom plates Because of Ribs
FIG. 5 MODE SHAPE AND NATURAL FREQUENCY AFTER MODIFICATION
356
FREQUENCY TABLE
MODE FIRST MODE SECOND MODE
BEFORE
MODIFCATION
17.7 Hz 19.7 Hz
AFTER
MODIFCATION
30.3 Hz 34.7 Hz
357
Rail and wheel contact
Prof .N. Siva Prasad, Indian Institute of Technology Madras
358
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Contact Stress Distribution
359
Oval Bellows with Mesh
360
Oval Bellows with Mesh
361
von Misses stress contour for Oval Bellows(Top surface)
362
von Misses stress contour for Oval Bellows
(Middle surface)
363
Layout of MEMU/DMC
Prof .N. Siva Prasad, Indian Institute of Technology Madras
364
Cross section of MEMU/DMC Shell
Prof .N. Siva Prasad, Indian Institute of Technology Madras
365
Underframe Assembly
Prof .N. Siva Prasad, Indian Institute of Technology Madras
366
FE model of the Shell
Prof .N. Siva Prasad, Indian Institute of Technology Madras
367
Boundary Conditions
Prof .N. Siva Prasad, Indian Institute of Technology Madras
368
Displacement in the Shell - Horizontal Load
Prof .N. Siva Prasad, Indian Institute of Technology Madras
369
FE model of the Shell(Modified Design)
Prof .N. Siva Prasad, Indian Institute of Technology Madras
370
Von-Misses Stress Contour in the Shell-
Vertical static Load(Modified Design)
Prof .N. Siva Prasad, Indian Institute of Technology Madras
371
Parts of master cylinder
Prof .N. Siva Prasad, Indian Institute of Technology Madras
372
Finite element Mesh of seal after assembly
Prof .N. Siva Prasad, Indian Institute of Technology Madras
373
Prof .N. Siva Prasad, Indian Institute of Technology Madras
374
Prof .N. Siva Prasad, Indian Institute of Technology Madras
375
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Pneumatic tyre
376
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Sinusoidal Distribution of Footprint Load
377
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Finite Element Mesh for Radial Tyre
378
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Deformed Shape of Radial Tyre
379
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Deformed Shape of Bias Tyre
380
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Track system in Heavy Vehicle
381
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Track system in Heavy Vehicle
382
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Track system in Heavy Vehicle
383
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Track system in Heavy Vehicle
384
Prof .N. Siva Prasad, Indian Institute of Technology Madras
385
Prof .N. Siva Prasad, Indian Institute of Technology Madras
386
Prof .N. Siva Prasad, Indian Institute of Technology Madras
387
Prof .N. Siva Prasad, Indian Institute of Technology Madras
388
Prof .N. Siva Prasad, Indian Institute of Technology Madras
389
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Iso-stress contours of Bush
390
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Model of the Bush for Temperature Estimation
391
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Iso-therms of Bush
392
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Analysis of Squirrel Cage Ball Bearing
used in Gas Turbine Engine
393
Analysis of Squirrel Cage Ball Bearing
used in Gas Turbine Engine
Prof .N. Siva Prasad, Indian Institute of Technology Madras
394
Finite element model of the bearing
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Analysis of Squirrel Cage Ball Bearing
used in Gas Turbine Engine
395
Four lobe mode shape of outer ring
8th natural frequency and mode shape
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Analysis of Squirrel Cage Ball Bearing
used in Gas Turbine Engine
396
Finite Element Analysis of Tower
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Support strength analysis of a Process column
397
Finite Element Analysis of Tower
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Support strength analysis of a Process column
398
Rubber seals for nuclear reactors
Prof .N. Siva Prasad, Indian Institute of Technology Madras
399
Types of expansions in seals
Prof .N. Siva Prasad, Indian Institute of Technology Madras
400
Prof .N. Siva Prasad, Indian Institute of Technology Madras
401
Prof .N. Siva Prasad, Indian Institute of Technology Madras
402
Prof .N. Siva Prasad, Indian Institute of Technology Madras
403
Prof .N. Siva Prasad, Indian Institute of Technology Madras
404
Prof .N. Siva Prasad, Indian Institute of Technology Madras
405
Prof .N. Siva Prasad, Indian Institute of Technology Madras
406
Buckling Mode
Prof .N. Siva Prasad, Indian Institute of Technology Madras
407
Prof .N. Siva Prasad, Indian Institute of Technology Madras
408
Gun positioning system
Prof .N. Siva Prasad, Indian Institute of Technology Madras
409
Elevation drive
Prof .N. Siva Prasad, Indian Institute of Technology Madras
410
Prof .N. Siva Prasad, Indian Institute of Technology Madras
Elevation drive
411
Prof .N. Siva Prasad, Indian Institute of Technology Madras
412
Prof .N. Siva Prasad, Indian Institute of Technology Madras
413
Arc Welding of a Plate
414
Details of different Welding sequence
a) Arcs moving from end to centre
415
b) Arcs moving from centre to ends
c) One arc moving from end to centre and another arc moving from centre to end
416
Initial mesh when the arcs are moving towards centre
Number of nodes =377
417
Adaptive mesh when the arcs are moving towards centre
Number of nodes =540
418
Variation of Thermal conductivity with Temperature
419
Variation of Heat capacity with Temperature
420
Variation of Strain-hardening with Temperature
421
Effect of sequence of welding on residual stresses
Longitudinal stress along the centre of the plate
422
Transverse stress along the centre of the plate
423
You might also like
- Finite Element Analysis in Geotechnical Engineering-Vol2Document448 pagesFinite Element Analysis in Geotechnical Engineering-Vol2Harish Lambadi77% (13)
- Advanced Solid Mechanics U SarvananDocument385 pagesAdvanced Solid Mechanics U Sarvananமாறன் செங்கேணிNo ratings yet
- Assignment 6 1386142Document4 pagesAssignment 6 1386142DuncanNo ratings yet
- Continuum Mech ProblemsDocument85 pagesContinuum Mech ProblemsDeepak Verma100% (1)
- Buckling ExamplesDocument5 pagesBuckling ExamplesSrivatsan SampathNo ratings yet
- A.MAULANA MALIK MH Dinamika Struktur c10Document6 pagesA.MAULANA MALIK MH Dinamika Struktur c10Maulana MalikNo ratings yet
- Topic 2 - Airy Stress FunctionDocument20 pagesTopic 2 - Airy Stress FunctionJoshua Mamouney100% (2)
- Chapter6 StiffnessMethodDocument11 pagesChapter6 StiffnessMethodkaranfilhasanNo ratings yet
- Stiffness MethodDocument36 pagesStiffness MethodEdouard MeyerNo ratings yet
- T00 MasterFrame Getting Started Tutorial PDFDocument36 pagesT00 MasterFrame Getting Started Tutorial PDFJEMAYERNo ratings yet
- Structural Dynamics UpdatedDocument24 pagesStructural Dynamics UpdatedatifNo ratings yet
- Advanced Mechanics of Solids - Question SetDocument3 pagesAdvanced Mechanics of Solids - Question SetAshish ZachariahNo ratings yet
- 10 Viscoelasticity 04 Hereditaory PDFDocument12 pages10 Viscoelasticity 04 Hereditaory PDFletter_ashish4444No ratings yet
- Thesis PHD Finite Element Analysis of Single Plate Shear Connections-AshakulDocument257 pagesThesis PHD Finite Element Analysis of Single Plate Shear Connections-AshakulKhairul Salleh BaharudinNo ratings yet
- Rayleigh RitzDocument10 pagesRayleigh RitzGeorge Alexander El-MallakhNo ratings yet
- Plane Stress - MSE 305-1Document149 pagesPlane Stress - MSE 305-1Oloyede RidwanNo ratings yet
- Duhamel IntegralDocument11 pagesDuhamel IntegralSubham MukherjeeNo ratings yet
- Camber GuidelineDocument1 pageCamber GuidelineShamsul IslamNo ratings yet
- General Method For Lateral and Lateral Torsional Buckling of Structural Components in Eurocode 3Document12 pagesGeneral Method For Lateral and Lateral Torsional Buckling of Structural Components in Eurocode 3VivaCharlesNo ratings yet
- Ramset Specifiers Anchoring Resource Book ANZ - TruBolt Mechanical AnchoringDocument10 pagesRamset Specifiers Anchoring Resource Book ANZ - TruBolt Mechanical AnchoringjlolhnpNo ratings yet
- Bearing CapacityDocument13 pagesBearing CapacityankitraginiNo ratings yet
- Lateral Torsional BucklingDocument24 pagesLateral Torsional BucklingAnonymous lEBdswQXmxNo ratings yet
- Fea QBDocument11 pagesFea QBPradeepNo ratings yet
- Chapter 5 Torsion BucklingDocument68 pagesChapter 5 Torsion BucklingMalik Rehan SyedNo ratings yet
- AMCRPS - PHB - 9thedition - Web PDFDocument448 pagesAMCRPS - PHB - 9thedition - Web PDFThaungMyintNo ratings yet
- Abaqus Beam Tutorial: Problem DescriptionDocument29 pagesAbaqus Beam Tutorial: Problem Descriptionpedro paivaNo ratings yet
- International Lateral LoadsDocument38 pagesInternational Lateral LoadsRamilArtates100% (1)
- Deflection of BeamsDocument5 pagesDeflection of BeamsMohammedAlasaadNo ratings yet
- Relationship Between Shear Stress and Shear StrainDocument4 pagesRelationship Between Shear Stress and Shear Strainwindgust820% (1)
- 4 Node QuadDocument27 pages4 Node QuadMathiew EstephoNo ratings yet
- (1972) Plastic Analysis of Castellated Beams-II. Analysis and TestsDocument30 pages(1972) Plastic Analysis of Castellated Beams-II. Analysis and TestsmikarceNo ratings yet
- Part3 T03 MasterPort Getting Started TutorialDocument47 pagesPart3 T03 MasterPort Getting Started TutorialcblerNo ratings yet
- Finit Element Analysis MatlabDocument3 pagesFinit Element Analysis MatlabAntehun MekonnenNo ratings yet
- Design of FootingDocument24 pagesDesign of FootingAnonymous ux7KlgruqgNo ratings yet
- Sidesway Web Buckling of Steel BeamsDocument12 pagesSidesway Web Buckling of Steel BeamsYuth Yuthdanai100% (1)
- Plastic Collapse - Beam in BendingDocument21 pagesPlastic Collapse - Beam in BendingXiangyang LuNo ratings yet
- RCD2Document59 pagesRCD2Bobby AguilarNo ratings yet
- Thick Plate On Elastic FoundationDocument21 pagesThick Plate On Elastic FoundationHasanain Almusawi100% (1)
- STRUCTURAL ANALYSIS ACE MCQssDocument70 pagesSTRUCTURAL ANALYSIS ACE MCQssAndresDelaVegaNo ratings yet
- Contoh Perhitungan Struktur Baja LenturDocument56 pagesContoh Perhitungan Struktur Baja LenturTrance SuchaoNo ratings yet
- Critical Axial Load For Torsional and Flexural Torsional Buckling ModesDocument5 pagesCritical Axial Load For Torsional and Flexural Torsional Buckling ModesBobaru MariusNo ratings yet
- Plate Theory WikiDocument12 pagesPlate Theory Wikiletter_ashish4444No ratings yet
- H2.4.10-Response To Step and Ramp ForcesDocument4 pagesH2.4.10-Response To Step and Ramp ForcesMD NayeemNo ratings yet
- Experimental Stress Analysis of Trapezoidal Corrugated Steel Web Beam - A ReviewDocument4 pagesExperimental Stress Analysis of Trapezoidal Corrugated Steel Web Beam - A ReviewAsr FlowerNo ratings yet
- 16 - Chapter 6 PDFDocument39 pages16 - Chapter 6 PDFDipankar NathNo ratings yet
- Link BeamDocument8 pagesLink BeamNeil SonNo ratings yet
- Con 1302Document12 pagesCon 1302Sanket Arun More100% (1)
- Sampleproblems FEDocument6 pagesSampleproblems FEnial69100% (1)
- Beams On Elastic FoundationDocument20 pagesBeams On Elastic FoundationShashi Bhushan KumarNo ratings yet
- Unit-IV Structural Analysis-II Part-A PDFDocument22 pagesUnit-IV Structural Analysis-II Part-A PDFMK VNo ratings yet
- Introduction To Seismic Essentials in GroningenDocument14 pagesIntroduction To Seismic Essentials in GroningenKay Chan SothearaNo ratings yet
- British Problem 5 PDFDocument5 pagesBritish Problem 5 PDFelixnzNo ratings yet
- Advanced Structural Mechanics (CSE 20204) Lecture 3: OutlineDocument8 pagesAdvanced Structural Mechanics (CSE 20204) Lecture 3: OutlineYUK LAM WONGNo ratings yet
- Chapter05 - Plane Frame and Grid EqDocument63 pagesChapter05 - Plane Frame and Grid EqAgus BaeNo ratings yet
- Beams Subjected To Torsion and Bending - I: I + I + I) - Here IDocument18 pagesBeams Subjected To Torsion and Bending - I: I + I + I) - Here Isagar1503No ratings yet
- Homework - Deriving Almansi Strain in Terms of DisplacementDocument2 pagesHomework - Deriving Almansi Strain in Terms of DisplacementJohn Mark Go PayawalNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Numerical Methods and Implementation in Geotechnical Engineering – Part 1From EverandNumerical Methods and Implementation in Geotechnical Engineering – Part 1No ratings yet
- Earthquake isolation method with variable natural frequencyFrom EverandEarthquake isolation method with variable natural frequencyNo ratings yet
- Plane Stress Vs StrainDocument53 pagesPlane Stress Vs StrainWondwosen A. LakewNo ratings yet
- 3D Timoshenko BeamDocument12 pages3D Timoshenko Beamreddy_kNo ratings yet
- Monotonic Uniaxial and Biaxial Electromechanical Experiments and Modeling of Uniaxial Stretched Polyvinylidene Fluoride PVDFDocument14 pagesMonotonic Uniaxial and Biaxial Electromechanical Experiments and Modeling of Uniaxial Stretched Polyvinylidene Fluoride PVDFHarish LambadiNo ratings yet
- (Galerkin) Finite Element Approximations: e N e 1 e e eDocument93 pages(Galerkin) Finite Element Approximations: e N e 1 e e eHarish LambadiNo ratings yet
- Umat DocumentationDocument47 pagesUmat DocumentationNgoc-Trung NguyenNo ratings yet
- Indian Institute of Technology Madras Institute Telephone DirectoryDocument52 pagesIndian Institute of Technology Madras Institute Telephone DirectorySidhant JainNo ratings yet
- Smart MaterialsDocument30 pagesSmart MaterialsHarish LambadiNo ratings yet
- Crash Course On Tensor Analysis Department of Mathematics, IIT MadrasDocument25 pagesCrash Course On Tensor Analysis Department of Mathematics, IIT MadrasHarish LambadiNo ratings yet
- User SubDocument542 pagesUser SubGiannis-Sama VazaiosNo ratings yet
- Modeling Discon XFEMDocument11 pagesModeling Discon XFEMHarish LambadiNo ratings yet
- Soil Problems N SolutionsDocument9 pagesSoil Problems N SolutionsHarish Lambadi100% (2)
- Soil Mechanics: A. Verruijt Delft University of Technology, 2001, 2010Document315 pagesSoil Mechanics: A. Verruijt Delft University of Technology, 2001, 2010Harish LambadiNo ratings yet
- Space Frames: I. Basic ConceptsDocument14 pagesSpace Frames: I. Basic Conceptschirag mulchandaniNo ratings yet
- The Galactic Magnetic FieldsDocument7 pagesThe Galactic Magnetic Fields1357531No ratings yet
- Bolt Strength PDFDocument1 pageBolt Strength PDFhlsimonNo ratings yet
- D 01Document17 pagesD 01ja_mufc_scribdNo ratings yet
- Spectrochimica Acta PaperDocument12 pagesSpectrochimica Acta PapersopmaNo ratings yet
- Thermal Physics: Raymond A. Serway Chris VuilleDocument44 pagesThermal Physics: Raymond A. Serway Chris VuilleMark Lorens StaanaNo ratings yet
- Rice 1788Document70 pagesRice 1788Dr. Rohit SinghNo ratings yet
- Theory of Metal Cutting-Tool GeometryDocument25 pagesTheory of Metal Cutting-Tool GeometryIzi78% (9)
- A List of 240 Physics Topics & Questions To ResearchDocument11 pagesA List of 240 Physics Topics & Questions To ResearchMuhammad TahirNo ratings yet
- Lecture 1 CIS303 17Document36 pagesLecture 1 CIS303 17Mohammed IbrahimNo ratings yet
- Rates of Chemical Reactions: Kinetics 1Document68 pagesRates of Chemical Reactions: Kinetics 1K CabeguinNo ratings yet
- Local Scour at Bridge Piers - ChiewDocument213 pagesLocal Scour at Bridge Piers - ChiewThokchom SureshNo ratings yet
- Cantilever Method of Calculation of Shear, Axial Forces in Column and Calculation of Deflection-Sap2000Document12 pagesCantilever Method of Calculation of Shear, Axial Forces in Column and Calculation of Deflection-Sap2000Afzal Waseem100% (1)
- Series and Shunt CompensationDocument65 pagesSeries and Shunt Compensation1balamanianNo ratings yet
- Tolerance Analysis of 2-D and 3-D AssembliesDocument30 pagesTolerance Analysis of 2-D and 3-D AssembliesKvs PhaniNo ratings yet
- Week10 Metamaterials IIDocument40 pagesWeek10 Metamaterials IIMahmudul HasanNo ratings yet
- AlloyDocument100 pagesAlloywahyuNo ratings yet
- University of Liège - Aerospace & Mechanical Engineering: Ludovic NoelsDocument48 pagesUniversity of Liège - Aerospace & Mechanical Engineering: Ludovic NoelsJimmy David Espinoza MejiaNo ratings yet
- HW07 PDFDocument1 pageHW07 PDFShweta SridharNo ratings yet
- Ch2 Fluid StaticsDocument131 pagesCh2 Fluid StaticsAsif SunnyNo ratings yet
- Lesson 14: Magnetism History: Asia Minor TurkeyDocument1 pageLesson 14: Magnetism History: Asia Minor TurkeygavinilaaNo ratings yet
- l16 CSL Theory Gbe 8nov11Document72 pagesl16 CSL Theory Gbe 8nov11Andrew BrownNo ratings yet
- Physic MCQDocument32 pagesPhysic MCQTruong NguyenNo ratings yet
- Proteins and Denaturing AgentsDocument5 pagesProteins and Denaturing AgentsAbdulrahman Nabil MohammedNo ratings yet
- Statistical Mechanics: Lecture A0: Phase TransitionsDocument5 pagesStatistical Mechanics: Lecture A0: Phase TransitionsTushar GhoshNo ratings yet
- Global Cement and Raw Materials Fusion/XRF Analytical SolutionDocument17 pagesGlobal Cement and Raw Materials Fusion/XRF Analytical SolutionJanet Tudor100% (1)
- Medical Physics Notes - Physics HSCDocument29 pagesMedical Physics Notes - Physics HSCBelinda ZhangNo ratings yet
- Iclp 2016LPofCFRPID256Document9 pagesIclp 2016LPofCFRPID256daniel govantesNo ratings yet