
Design and Testing of A Low Shock Discrete Point Spacecraft Separation System
Design and Testing of A Low Shock Discrete Point Spacecraft Separation System
You might also like
- Fleet Management ProcessDocument14 pagesFleet Management ProcessHari Koppisetti80% (5)
- Trane CVHE, F, G-SB-33CDocument28 pagesTrane CVHE, F, G-SB-33CWestbournerd100% (8)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- MC150 Collimator ManualDocument68 pagesMC150 Collimator ManualIvy100% (2)
- 211-04 Steering ColumnDocument14 pages211-04 Steering ColumnMiguel AngelNo ratings yet
- Transfer: Workshop ManualDocument92 pagesTransfer: Workshop ManualmailforspamNo ratings yet
- Honda Accord Tourer 7th Gen Prefacelift AccessoriesDocument7 pagesHonda Accord Tourer 7th Gen Prefacelift AccessoriesAOCUK100% (1)
- Assignment - Movie Review of Apollo 13Document4 pagesAssignment - Movie Review of Apollo 13shahrukh62No ratings yet
- 18il0059 Variation Order DupaDocument41 pages18il0059 Variation Order DupaMichelle GozonNo ratings yet
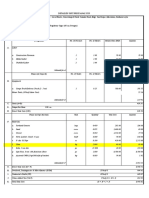
- Annexure 17 Tool For Rate Analysis-DI PVC HDPE MDPE Pipe Supply Laying JointingDocument8 pagesAnnexure 17 Tool For Rate Analysis-DI PVC HDPE MDPE Pipe Supply Laying Jointinghareesh13h100% (1)
- Productivity Improvement of Carton Manufacturing Industry by Implementation of Lean Six Sigma, ECRS, Work Study, and 5S A Case Study of ABC Co., LTDDocument9 pagesProductivity Improvement of Carton Manufacturing Industry by Implementation of Lean Six Sigma, ECRS, Work Study, and 5S A Case Study of ABC Co., LTDSubash ChandarNo ratings yet
- The Believer - Stage Separation of Space Launch VehiclesDocument14 pagesThe Believer - Stage Separation of Space Launch VehiclesWaqas ShahNo ratings yet
- Stage Separation of Space Launch VehiclesDocument12 pagesStage Separation of Space Launch Vehiclesvasanraja100% (1)
- Testing Orion's Fairing Separation SystemDocument14 pagesTesting Orion's Fairing Separation Systemkiara935spNo ratings yet
- Solar Array Drive Mechanism PDFDocument7 pagesSolar Array Drive Mechanism PDFMagno JuniorNo ratings yet
- Service Manual: Bbk920SDocument64 pagesService Manual: Bbk920SMrbar BarstoynNo ratings yet
- Otc19797 A COMPARISON OF SPAR AND SINGLE COLUMN FLOATERDocument15 pagesOtc19797 A COMPARISON OF SPAR AND SINGLE COLUMN FLOATERflowline2010No ratings yet
- SCO Series Cutout: Compliance With Standards Ordering Code 1475.92.030Document2 pagesSCO Series Cutout: Compliance With Standards Ordering Code 1475.92.030giant360No ratings yet
- Space Shuttle Solid Rocket Booster Frangible Nut Crossover SystemDocument2 pagesSpace Shuttle Solid Rocket Booster Frangible Nut Crossover SystemBob AndrepontNo ratings yet
- Dakota 2000Document10 pagesDakota 2000Edgar Zurdo RamirezNo ratings yet
- Certification - Hoist SystemDocument33 pagesCertification - Hoist SystemSandra MurciaNo ratings yet
- Altronic D.I.S. Medium Engines, 4-16 Cylinders Service Instructions Form Dis Si 6-91Document14 pagesAltronic D.I.S. Medium Engines, 4-16 Cylinders Service Instructions Form Dis Si 6-91Cpe_CarloNo ratings yet
- Altronic D.I.S. Medium Engines, 4-16 Cylinders Service Instructions Form Dis Si 6-91Document14 pagesAltronic D.I.S. Medium Engines, 4-16 Cylinders Service Instructions Form Dis Si 6-91Leinner RamirezNo ratings yet
- Hoisting System - Notes - Jun-16Document214 pagesHoisting System - Notes - Jun-16Mhamed ShahatNo ratings yet
- SMAC Actuators User Manual 05-05Document52 pagesSMAC Actuators User Manual 05-05joaoluNo ratings yet
- JVC CA-HXZ3Document93 pagesJVC CA-HXZ3Cuauhcoyotl Xocoyotsin100% (1)
- BBK9903S Service ManualDocument94 pagesBBK9903S Service ManualRudiLMNo ratings yet
- QCS-2010 Section 21 Part 3 Protective DevicesDocument14 pagesQCS-2010 Section 21 Part 3 Protective Devicesbryanpastor106100% (1)
- L 500 600 Mechanical Installation GuideDocument38 pagesL 500 600 Mechanical Installation GuideDan MoldovanNo ratings yet
- Cirrus AMM 95-00Document22 pagesCirrus AMM 95-00Leandro CalientoNo ratings yet
- Eureka Linear MC150Document78 pagesEureka Linear MC150Javier AguileraNo ratings yet
- Installation Guide: Guide For Your AZ-125, Azimuth Drive Solar TrackerDocument39 pagesInstallation Guide: Guide For Your AZ-125, Azimuth Drive Solar TrackersuNo ratings yet
- Eucass2019-0745 2Document12 pagesEucass2019-0745 2Waqas ShahNo ratings yet
- Fron Axel 966cDocument3 pagesFron Axel 966cHector VallesNo ratings yet
- Altronics AV SRVC MNL 12-1996 PDFDocument15 pagesAltronics AV SRVC MNL 12-1996 PDFSMcNo ratings yet
- HCD XGR88Document78 pagesHCD XGR88chucho911225No ratings yet
- Manual de Servicio AS600Document71 pagesManual de Servicio AS600Katerine Yandun0% (1)
- Stage SeparationDocument10 pagesStage SeparationJabez RichardsNo ratings yet
- Panasonic Pcz1103024ce TX-p46gt30e TX-p46gt30j Chassis Gpf14d-EDocument142 pagesPanasonic Pcz1103024ce TX-p46gt30e TX-p46gt30j Chassis Gpf14d-EMarko VujinovićNo ratings yet
- Colimador Manual CompleteDocument78 pagesColimador Manual CompleteLuis Alberto Díaz OlmedoNo ratings yet
- PINNACLE Manual CompleteDocument78 pagesPINNACLE Manual CompleteLuis Alberto Díaz OlmedoNo ratings yet
- Climbing Formwork: July 2008, English Keep For Later Use!Document36 pagesClimbing Formwork: July 2008, English Keep For Later Use!Muamer Jasna ĐulovićNo ratings yet
- Method Statement For Modifications in Low Power Circuit Breaker Ds-206S For New Compressor SystemsDocument8 pagesMethod Statement For Modifications in Low Power Circuit Breaker Ds-206S For New Compressor SystemsJohn Philip BuntalesNo ratings yet
- Panasonic Tx-P42g30e J tx-pf42g30 Chassis Gpf14d-E SMDocument117 pagesPanasonic Tx-P42g30e J tx-pf42g30 Chassis Gpf14d-E SMreb2009No ratings yet
- Instruction Manual: Installation Operation Maintenance Traction AlternatorDocument31 pagesInstruction Manual: Installation Operation Maintenance Traction AlternatorCamilo Andres QuinteroNo ratings yet
- MX gc5jDocument35 pagesMX gc5jdavidNo ratings yet
- Magnetic System DatasheetDocument7 pagesMagnetic System DatasheetJuan Antonio MarinNo ratings yet
- SMAC Actuators User ManualDocument52 pagesSMAC Actuators User ManualGabo DuarNo ratings yet
- Cms Electronics BoardDocument11 pagesCms Electronics BoardLuis Fernando Becerra JimenezNo ratings yet
- JVC mx-gt80 gt90 SM No-Sch (ET)Document48 pagesJVC mx-gt80 gt90 SM No-Sch (ET)Cliffton FilipinoPrd ShraderNo ratings yet
- Punjab Aircraft Maintenance Engineering College, Patiala Procedure Sheet: Module 6 (6.5 To 6.10)Document4 pagesPunjab Aircraft Maintenance Engineering College, Patiala Procedure Sheet: Module 6 (6.5 To 6.10)Arjun SharmaNo ratings yet
- Emission and Electrical Diagnosis (With Tech 2) : Workshop ManualDocument78 pagesEmission and Electrical Diagnosis (With Tech 2) : Workshop ManualAndres Miguel Cevallos Garcia100% (2)
- Installation PracticeDocument16 pagesInstallation PracticeramsesiNo ratings yet
- Service ManualDocument38 pagesService ManualekgujjuNo ratings yet
- 16Q E2 Add1 Ballot DraftDocument15 pages16Q E2 Add1 Ballot DraftRonald BinilangNo ratings yet
- Design of Constant Velocity Joint PDocument13 pagesDesign of Constant Velocity Joint PMaily Bendezu HuamánNo ratings yet
- Solar Panels On Tension CableDocument36 pagesSolar Panels On Tension CablesushmaNo ratings yet
- (V) KR 6 KS (V) KR 16 KS ... - 2 KS: RepairDocument31 pages(V) KR 6 KS (V) KR 16 KS ... - 2 KS: RepairluckesmanNo ratings yet
- Design of Solar Panel Deployment Mechanism For A 1U CubeSatDocument7 pagesDesign of Solar Panel Deployment Mechanism For A 1U CubeSatAliMurtazaKothawalaNo ratings yet
- Diagrama de Modular LG XC62Document67 pagesDiagrama de Modular LG XC62Antonio ChavezNo ratings yet
- Avalon-GT Release Systems and DevicesDocument8 pagesAvalon-GT Release Systems and DevicesAndry HermawanNo ratings yet
- Acc INFINTY 2008Document5 pagesAcc INFINTY 2008Jorge Antonio GuillenNo ratings yet
- Ahmed Okail (Space Environment)Document12 pagesAhmed Okail (Space Environment)Ahmed OkailNo ratings yet
- Panasonic Tc-50a400x Chassis km25Document63 pagesPanasonic Tc-50a400x Chassis km25Zeferino OlivNo ratings yet
- DC DC Converter (Power Steering Motor) - ALLDATA RepairDocument5 pagesDC DC Converter (Power Steering Motor) - ALLDATA RepairAhmad KamalNo ratings yet
- Drive Axle, Speed Reducer, and Differential: J2.00-3.20XM (J40-60XM, J40-60XM) (A216) J2.00-3.20XM (J40-60Z) (A416)Document18 pagesDrive Axle, Speed Reducer, and Differential: J2.00-3.20XM (J40-60XM, J40-60XM) (A216) J2.00-3.20XM (J40-60Z) (A416)InfoMecanicaTaller contactoNo ratings yet
- Aerospace 08 00169 v2Document27 pagesAerospace 08 00169 v2kirancallsNo ratings yet
- Eurostar E3000 Satellite On-Board Software Development of A Product Line Towards Multiple System NeedsDocument8 pagesEurostar E3000 Satellite On-Board Software Development of A Product Line Towards Multiple System NeedskirancallsNo ratings yet
- 2 Astrium Com SatpdfDocument17 pages2 Astrium Com SatpdfkirancallsNo ratings yet
- Eos and Spacelink Select Ohb As Preferred Tenderer For Satellite Manufacturing ContractDocument2 pagesEos and Spacelink Select Ohb As Preferred Tenderer For Satellite Manufacturing ContractkirancallsNo ratings yet
- PhysicsBest 2021 27 29Document3 pagesPhysicsBest 2021 27 29kirancallsNo ratings yet
- Japan Space Policy Plan 2015 - 06 150226 - DG - KomiyaDocument21 pagesJapan Space Policy Plan 2015 - 06 150226 - DG - KomiyakirancallsNo ratings yet
- Towards A New Generation of IP-based SatellitesDocument5 pagesTowards A New Generation of IP-based SatelliteskirancallsNo ratings yet
- Spacecraft Mechanical Sub-System Design & Manufacturing Introductory CourseDocument79 pagesSpacecraft Mechanical Sub-System Design & Manufacturing Introductory CoursekirancallsNo ratings yet
- Child Development: 6-9 MonthsDocument12 pagesChild Development: 6-9 MonthskirancallsNo ratings yet
- Performance Status of Iasi On Metop-A and Metop-B: E. Jacquette, E. PéquignotDocument19 pagesPerformance Status of Iasi On Metop-A and Metop-B: E. Jacquette, E. PéquignotkirancallsNo ratings yet
- India To Submit Saarc Satellite Proposal at Next Summit: New DelhiDocument1 pageIndia To Submit Saarc Satellite Proposal at Next Summit: New DelhikirancallsNo ratings yet
- 10 1 1 148 4197Document5 pages10 1 1 148 4197kirancallsNo ratings yet
- Accepted ManuscriptDocument10 pagesAccepted ManuscriptkirancallsNo ratings yet
- Progress in Electromagnetics Research B, Vol. 27, 289-306, 2011Document18 pagesProgress in Electromagnetics Research B, Vol. 27, 289-306, 2011kirancallsNo ratings yet
- The Atmospheric Dynamics Mission: Earth Explorer MissionsDocument6 pagesThe Atmospheric Dynamics Mission: Earth Explorer MissionskirancallsNo ratings yet
- Paper Title: Subtitle As NeededDocument4 pagesPaper Title: Subtitle As NeededkirancallsNo ratings yet
- Geostationary Hyperspectral Imaging From 0.4 To 1 Microns A Potent Tool For Analysis and NowcastingDocument8 pagesGeostationary Hyperspectral Imaging From 0.4 To 1 Microns A Potent Tool For Analysis and NowcastingkirancallsNo ratings yet
- Estimation of Rain Attenuation at C, Ka, Ku and V Bands For Satellite Links in South AfricaDocument11 pagesEstimation of Rain Attenuation at C, Ka, Ku and V Bands For Satellite Links in South AfricakirancallsNo ratings yet
- 5 Stardst ch04Document7 pages5 Stardst ch04kirancallsNo ratings yet
- Shutter Mechanism For The Pleiades Satellites: Client: Cnes, Eads AstriumDocument1 pageShutter Mechanism For The Pleiades Satellites: Client: Cnes, Eads AstriumkirancallsNo ratings yet
- Arianespace Payload SeparationDocument9 pagesArianespace Payload SeparationkirancallsNo ratings yet
- Tender DrainageDocument19 pagesTender DrainageSeng Koon ConstructionNo ratings yet
- Tep 900 Spe PP BP4 1009 - B08Document55 pagesTep 900 Spe PP BP4 1009 - B08Okinawa TeakNo ratings yet
- National Accounts Transportation Logistics in Chicago IL Resume David BriggsDocument2 pagesNational Accounts Transportation Logistics in Chicago IL Resume David BriggsDavidBriggsNo ratings yet
- Stae of Gujrat, India - Hospital PolicyDocument18 pagesStae of Gujrat, India - Hospital Policypal_stephenNo ratings yet
- Effect of Globalization and Automation On Small Scale IndustryDocument5 pagesEffect of Globalization and Automation On Small Scale IndustryIjsrnet EditorialNo ratings yet
- Analisis Kecelakaan HMC Dengan Metode Hfacs (Human Factor: Analysis and Classification System)Document6 pagesAnalisis Kecelakaan HMC Dengan Metode Hfacs (Human Factor: Analysis and Classification System)memeihsNo ratings yet
- Crcu4601wm OmDocument2 pagesCrcu4601wm OmproctepNo ratings yet
- New Microsoft Word DocumentDocument7 pagesNew Microsoft Word DocumentAmr AliNo ratings yet
- Wascomat Specifications W620co W625co W630co W640co W655co W675coDocument2 pagesWascomat Specifications W620co W625co W630co W640co W655co W675comairimsp2003No ratings yet
- CLEM Azteca SiteOyon 180116Document12 pagesCLEM Azteca SiteOyon 180116Hubert Reynaldo Chang EscalanteNo ratings yet
- Basic Hydraulics Learning System (850-H1)Document2 pagesBasic Hydraulics Learning System (850-H1)Ross Mel Bautista LingonNo ratings yet
- Software Estimation Models: By: Vijay KumarDocument24 pagesSoftware Estimation Models: By: Vijay KumarMuhammad ArshadNo ratings yet
- Importance of Standardized Welding SymbolsDocument2 pagesImportance of Standardized Welding SymbolsPatrick DominguezNo ratings yet
- Company Profile - ZAP FIREDocument7 pagesCompany Profile - ZAP FIRENeha GuptaNo ratings yet
- ABS Ships - Part - 1 - E-Apr09Document70 pagesABS Ships - Part - 1 - E-Apr09Cristian Martin HilzingerNo ratings yet
- Cicor PortfolioDocument12 pagesCicor PortfolioGabriela PricopeNo ratings yet
- Specialty Distribution Newsletter Sep2018Document23 pagesSpecialty Distribution Newsletter Sep2018MoneycomeNo ratings yet
- Lalit (1 5)Document2 pagesLalit (1 5)Baljeet SinghNo ratings yet
- Tugas Praktik Pertemuan 3-1Document11 pagesTugas Praktik Pertemuan 3-1Vivianty IbrahimNo ratings yet
- Goa Msme Annex ADocument3 pagesGoa Msme Annex AKartik RajputNo ratings yet
- Driving Training Activity MatrixDocument19 pagesDriving Training Activity MatrixCindy VillenaNo ratings yet
- How To Find Table Name For A Field Which Is Sho..Document13 pagesHow To Find Table Name For A Field Which Is Sho..faisalkhan55No ratings yet
- Ar2011full - Annual Report of ToyotaDocument120 pagesAr2011full - Annual Report of ToyotaVivek TyagiNo ratings yet











































































































Download as pdf or txt
You might also like
- Fleet Management ProcessDocument14 pagesFleet Management ProcessHari Koppisetti80% (5)
- Trane CVHE, F, G-SB-33CDocument28 pagesTrane CVHE, F, G-SB-33CWestbournerd100% (8)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- MC150 Collimator ManualDocument68 pagesMC150 Collimator ManualIvy100% (2)
- 211-04 Steering ColumnDocument14 pages211-04 Steering ColumnMiguel AngelNo ratings yet
- Transfer: Workshop ManualDocument92 pagesTransfer: Workshop ManualmailforspamNo ratings yet
- Honda Accord Tourer 7th Gen Prefacelift AccessoriesDocument7 pagesHonda Accord Tourer 7th Gen Prefacelift AccessoriesAOCUK100% (1)
- Assignment - Movie Review of Apollo 13Document4 pagesAssignment - Movie Review of Apollo 13shahrukh62No ratings yet
- 18il0059 Variation Order DupaDocument41 pages18il0059 Variation Order DupaMichelle GozonNo ratings yet
- Annexure 17 Tool For Rate Analysis-DI PVC HDPE MDPE Pipe Supply Laying JointingDocument8 pagesAnnexure 17 Tool For Rate Analysis-DI PVC HDPE MDPE Pipe Supply Laying Jointinghareesh13h100% (1)
- Productivity Improvement of Carton Manufacturing Industry by Implementation of Lean Six Sigma, ECRS, Work Study, and 5S A Case Study of ABC Co., LTDDocument9 pagesProductivity Improvement of Carton Manufacturing Industry by Implementation of Lean Six Sigma, ECRS, Work Study, and 5S A Case Study of ABC Co., LTDSubash ChandarNo ratings yet
- The Believer - Stage Separation of Space Launch VehiclesDocument14 pagesThe Believer - Stage Separation of Space Launch VehiclesWaqas ShahNo ratings yet
- Stage Separation of Space Launch VehiclesDocument12 pagesStage Separation of Space Launch Vehiclesvasanraja100% (1)
- Testing Orion's Fairing Separation SystemDocument14 pagesTesting Orion's Fairing Separation Systemkiara935spNo ratings yet
- Solar Array Drive Mechanism PDFDocument7 pagesSolar Array Drive Mechanism PDFMagno JuniorNo ratings yet
- Service Manual: Bbk920SDocument64 pagesService Manual: Bbk920SMrbar BarstoynNo ratings yet
- Otc19797 A COMPARISON OF SPAR AND SINGLE COLUMN FLOATERDocument15 pagesOtc19797 A COMPARISON OF SPAR AND SINGLE COLUMN FLOATERflowline2010No ratings yet
- SCO Series Cutout: Compliance With Standards Ordering Code 1475.92.030Document2 pagesSCO Series Cutout: Compliance With Standards Ordering Code 1475.92.030giant360No ratings yet
- Space Shuttle Solid Rocket Booster Frangible Nut Crossover SystemDocument2 pagesSpace Shuttle Solid Rocket Booster Frangible Nut Crossover SystemBob AndrepontNo ratings yet
- Dakota 2000Document10 pagesDakota 2000Edgar Zurdo RamirezNo ratings yet
- Certification - Hoist SystemDocument33 pagesCertification - Hoist SystemSandra MurciaNo ratings yet
- Altronic D.I.S. Medium Engines, 4-16 Cylinders Service Instructions Form Dis Si 6-91Document14 pagesAltronic D.I.S. Medium Engines, 4-16 Cylinders Service Instructions Form Dis Si 6-91Cpe_CarloNo ratings yet
- Altronic D.I.S. Medium Engines, 4-16 Cylinders Service Instructions Form Dis Si 6-91Document14 pagesAltronic D.I.S. Medium Engines, 4-16 Cylinders Service Instructions Form Dis Si 6-91Leinner RamirezNo ratings yet
- Hoisting System - Notes - Jun-16Document214 pagesHoisting System - Notes - Jun-16Mhamed ShahatNo ratings yet
- SMAC Actuators User Manual 05-05Document52 pagesSMAC Actuators User Manual 05-05joaoluNo ratings yet
- JVC CA-HXZ3Document93 pagesJVC CA-HXZ3Cuauhcoyotl Xocoyotsin100% (1)
- BBK9903S Service ManualDocument94 pagesBBK9903S Service ManualRudiLMNo ratings yet
- QCS-2010 Section 21 Part 3 Protective DevicesDocument14 pagesQCS-2010 Section 21 Part 3 Protective Devicesbryanpastor106100% (1)
- L 500 600 Mechanical Installation GuideDocument38 pagesL 500 600 Mechanical Installation GuideDan MoldovanNo ratings yet
- Cirrus AMM 95-00Document22 pagesCirrus AMM 95-00Leandro CalientoNo ratings yet
- Eureka Linear MC150Document78 pagesEureka Linear MC150Javier AguileraNo ratings yet
- Installation Guide: Guide For Your AZ-125, Azimuth Drive Solar TrackerDocument39 pagesInstallation Guide: Guide For Your AZ-125, Azimuth Drive Solar TrackersuNo ratings yet
- Eucass2019-0745 2Document12 pagesEucass2019-0745 2Waqas ShahNo ratings yet
- Fron Axel 966cDocument3 pagesFron Axel 966cHector VallesNo ratings yet
- Altronics AV SRVC MNL 12-1996 PDFDocument15 pagesAltronics AV SRVC MNL 12-1996 PDFSMcNo ratings yet
- HCD XGR88Document78 pagesHCD XGR88chucho911225No ratings yet
- Manual de Servicio AS600Document71 pagesManual de Servicio AS600Katerine Yandun0% (1)
- Stage SeparationDocument10 pagesStage SeparationJabez RichardsNo ratings yet
- Panasonic Pcz1103024ce TX-p46gt30e TX-p46gt30j Chassis Gpf14d-EDocument142 pagesPanasonic Pcz1103024ce TX-p46gt30e TX-p46gt30j Chassis Gpf14d-EMarko VujinovićNo ratings yet
- Colimador Manual CompleteDocument78 pagesColimador Manual CompleteLuis Alberto Díaz OlmedoNo ratings yet
- PINNACLE Manual CompleteDocument78 pagesPINNACLE Manual CompleteLuis Alberto Díaz OlmedoNo ratings yet
- Climbing Formwork: July 2008, English Keep For Later Use!Document36 pagesClimbing Formwork: July 2008, English Keep For Later Use!Muamer Jasna ĐulovićNo ratings yet
- Method Statement For Modifications in Low Power Circuit Breaker Ds-206S For New Compressor SystemsDocument8 pagesMethod Statement For Modifications in Low Power Circuit Breaker Ds-206S For New Compressor SystemsJohn Philip BuntalesNo ratings yet
- Panasonic Tx-P42g30e J tx-pf42g30 Chassis Gpf14d-E SMDocument117 pagesPanasonic Tx-P42g30e J tx-pf42g30 Chassis Gpf14d-E SMreb2009No ratings yet
- Instruction Manual: Installation Operation Maintenance Traction AlternatorDocument31 pagesInstruction Manual: Installation Operation Maintenance Traction AlternatorCamilo Andres QuinteroNo ratings yet
- MX gc5jDocument35 pagesMX gc5jdavidNo ratings yet
- Magnetic System DatasheetDocument7 pagesMagnetic System DatasheetJuan Antonio MarinNo ratings yet
- SMAC Actuators User ManualDocument52 pagesSMAC Actuators User ManualGabo DuarNo ratings yet
- Cms Electronics BoardDocument11 pagesCms Electronics BoardLuis Fernando Becerra JimenezNo ratings yet
- JVC mx-gt80 gt90 SM No-Sch (ET)Document48 pagesJVC mx-gt80 gt90 SM No-Sch (ET)Cliffton FilipinoPrd ShraderNo ratings yet
- Punjab Aircraft Maintenance Engineering College, Patiala Procedure Sheet: Module 6 (6.5 To 6.10)Document4 pagesPunjab Aircraft Maintenance Engineering College, Patiala Procedure Sheet: Module 6 (6.5 To 6.10)Arjun SharmaNo ratings yet
- Emission and Electrical Diagnosis (With Tech 2) : Workshop ManualDocument78 pagesEmission and Electrical Diagnosis (With Tech 2) : Workshop ManualAndres Miguel Cevallos Garcia100% (2)
- Installation PracticeDocument16 pagesInstallation PracticeramsesiNo ratings yet
- Service ManualDocument38 pagesService ManualekgujjuNo ratings yet
- 16Q E2 Add1 Ballot DraftDocument15 pages16Q E2 Add1 Ballot DraftRonald BinilangNo ratings yet
- Design of Constant Velocity Joint PDocument13 pagesDesign of Constant Velocity Joint PMaily Bendezu HuamánNo ratings yet
- Solar Panels On Tension CableDocument36 pagesSolar Panels On Tension CablesushmaNo ratings yet
- (V) KR 6 KS (V) KR 16 KS ... - 2 KS: RepairDocument31 pages(V) KR 6 KS (V) KR 16 KS ... - 2 KS: RepairluckesmanNo ratings yet
- Design of Solar Panel Deployment Mechanism For A 1U CubeSatDocument7 pagesDesign of Solar Panel Deployment Mechanism For A 1U CubeSatAliMurtazaKothawalaNo ratings yet
- Diagrama de Modular LG XC62Document67 pagesDiagrama de Modular LG XC62Antonio ChavezNo ratings yet
- Avalon-GT Release Systems and DevicesDocument8 pagesAvalon-GT Release Systems and DevicesAndry HermawanNo ratings yet
- Acc INFINTY 2008Document5 pagesAcc INFINTY 2008Jorge Antonio GuillenNo ratings yet
- Ahmed Okail (Space Environment)Document12 pagesAhmed Okail (Space Environment)Ahmed OkailNo ratings yet
- Panasonic Tc-50a400x Chassis km25Document63 pagesPanasonic Tc-50a400x Chassis km25Zeferino OlivNo ratings yet
- DC DC Converter (Power Steering Motor) - ALLDATA RepairDocument5 pagesDC DC Converter (Power Steering Motor) - ALLDATA RepairAhmad KamalNo ratings yet
- Drive Axle, Speed Reducer, and Differential: J2.00-3.20XM (J40-60XM, J40-60XM) (A216) J2.00-3.20XM (J40-60Z) (A416)Document18 pagesDrive Axle, Speed Reducer, and Differential: J2.00-3.20XM (J40-60XM, J40-60XM) (A216) J2.00-3.20XM (J40-60Z) (A416)InfoMecanicaTaller contactoNo ratings yet
- Aerospace 08 00169 v2Document27 pagesAerospace 08 00169 v2kirancallsNo ratings yet
- Eurostar E3000 Satellite On-Board Software Development of A Product Line Towards Multiple System NeedsDocument8 pagesEurostar E3000 Satellite On-Board Software Development of A Product Line Towards Multiple System NeedskirancallsNo ratings yet
- 2 Astrium Com SatpdfDocument17 pages2 Astrium Com SatpdfkirancallsNo ratings yet
- Eos and Spacelink Select Ohb As Preferred Tenderer For Satellite Manufacturing ContractDocument2 pagesEos and Spacelink Select Ohb As Preferred Tenderer For Satellite Manufacturing ContractkirancallsNo ratings yet
- PhysicsBest 2021 27 29Document3 pagesPhysicsBest 2021 27 29kirancallsNo ratings yet
- Japan Space Policy Plan 2015 - 06 150226 - DG - KomiyaDocument21 pagesJapan Space Policy Plan 2015 - 06 150226 - DG - KomiyakirancallsNo ratings yet
- Towards A New Generation of IP-based SatellitesDocument5 pagesTowards A New Generation of IP-based SatelliteskirancallsNo ratings yet
- Spacecraft Mechanical Sub-System Design & Manufacturing Introductory CourseDocument79 pagesSpacecraft Mechanical Sub-System Design & Manufacturing Introductory CoursekirancallsNo ratings yet
- Child Development: 6-9 MonthsDocument12 pagesChild Development: 6-9 MonthskirancallsNo ratings yet
- Performance Status of Iasi On Metop-A and Metop-B: E. Jacquette, E. PéquignotDocument19 pagesPerformance Status of Iasi On Metop-A and Metop-B: E. Jacquette, E. PéquignotkirancallsNo ratings yet
- India To Submit Saarc Satellite Proposal at Next Summit: New DelhiDocument1 pageIndia To Submit Saarc Satellite Proposal at Next Summit: New DelhikirancallsNo ratings yet
- 10 1 1 148 4197Document5 pages10 1 1 148 4197kirancallsNo ratings yet
- Accepted ManuscriptDocument10 pagesAccepted ManuscriptkirancallsNo ratings yet
- Progress in Electromagnetics Research B, Vol. 27, 289-306, 2011Document18 pagesProgress in Electromagnetics Research B, Vol. 27, 289-306, 2011kirancallsNo ratings yet
- The Atmospheric Dynamics Mission: Earth Explorer MissionsDocument6 pagesThe Atmospheric Dynamics Mission: Earth Explorer MissionskirancallsNo ratings yet
- Paper Title: Subtitle As NeededDocument4 pagesPaper Title: Subtitle As NeededkirancallsNo ratings yet
- Geostationary Hyperspectral Imaging From 0.4 To 1 Microns A Potent Tool For Analysis and NowcastingDocument8 pagesGeostationary Hyperspectral Imaging From 0.4 To 1 Microns A Potent Tool For Analysis and NowcastingkirancallsNo ratings yet
- Estimation of Rain Attenuation at C, Ka, Ku and V Bands For Satellite Links in South AfricaDocument11 pagesEstimation of Rain Attenuation at C, Ka, Ku and V Bands For Satellite Links in South AfricakirancallsNo ratings yet
- 5 Stardst ch04Document7 pages5 Stardst ch04kirancallsNo ratings yet
- Shutter Mechanism For The Pleiades Satellites: Client: Cnes, Eads AstriumDocument1 pageShutter Mechanism For The Pleiades Satellites: Client: Cnes, Eads AstriumkirancallsNo ratings yet
- Arianespace Payload SeparationDocument9 pagesArianespace Payload SeparationkirancallsNo ratings yet
- Tender DrainageDocument19 pagesTender DrainageSeng Koon ConstructionNo ratings yet
- Tep 900 Spe PP BP4 1009 - B08Document55 pagesTep 900 Spe PP BP4 1009 - B08Okinawa TeakNo ratings yet
- National Accounts Transportation Logistics in Chicago IL Resume David BriggsDocument2 pagesNational Accounts Transportation Logistics in Chicago IL Resume David BriggsDavidBriggsNo ratings yet
- Stae of Gujrat, India - Hospital PolicyDocument18 pagesStae of Gujrat, India - Hospital Policypal_stephenNo ratings yet
- Effect of Globalization and Automation On Small Scale IndustryDocument5 pagesEffect of Globalization and Automation On Small Scale IndustryIjsrnet EditorialNo ratings yet
- Analisis Kecelakaan HMC Dengan Metode Hfacs (Human Factor: Analysis and Classification System)Document6 pagesAnalisis Kecelakaan HMC Dengan Metode Hfacs (Human Factor: Analysis and Classification System)memeihsNo ratings yet
- Crcu4601wm OmDocument2 pagesCrcu4601wm OmproctepNo ratings yet
- New Microsoft Word DocumentDocument7 pagesNew Microsoft Word DocumentAmr AliNo ratings yet
- Wascomat Specifications W620co W625co W630co W640co W655co W675coDocument2 pagesWascomat Specifications W620co W625co W630co W640co W655co W675comairimsp2003No ratings yet
- CLEM Azteca SiteOyon 180116Document12 pagesCLEM Azteca SiteOyon 180116Hubert Reynaldo Chang EscalanteNo ratings yet
- Basic Hydraulics Learning System (850-H1)Document2 pagesBasic Hydraulics Learning System (850-H1)Ross Mel Bautista LingonNo ratings yet
- Software Estimation Models: By: Vijay KumarDocument24 pagesSoftware Estimation Models: By: Vijay KumarMuhammad ArshadNo ratings yet
- Importance of Standardized Welding SymbolsDocument2 pagesImportance of Standardized Welding SymbolsPatrick DominguezNo ratings yet
- Company Profile - ZAP FIREDocument7 pagesCompany Profile - ZAP FIRENeha GuptaNo ratings yet
- ABS Ships - Part - 1 - E-Apr09Document70 pagesABS Ships - Part - 1 - E-Apr09Cristian Martin HilzingerNo ratings yet
- Cicor PortfolioDocument12 pagesCicor PortfolioGabriela PricopeNo ratings yet
- Specialty Distribution Newsletter Sep2018Document23 pagesSpecialty Distribution Newsletter Sep2018MoneycomeNo ratings yet
- Lalit (1 5)Document2 pagesLalit (1 5)Baljeet SinghNo ratings yet
- Tugas Praktik Pertemuan 3-1Document11 pagesTugas Praktik Pertemuan 3-1Vivianty IbrahimNo ratings yet
- Goa Msme Annex ADocument3 pagesGoa Msme Annex AKartik RajputNo ratings yet
- Driving Training Activity MatrixDocument19 pagesDriving Training Activity MatrixCindy VillenaNo ratings yet
- How To Find Table Name For A Field Which Is Sho..Document13 pagesHow To Find Table Name For A Field Which Is Sho..faisalkhan55No ratings yet
- Ar2011full - Annual Report of ToyotaDocument120 pagesAr2011full - Annual Report of ToyotaVivek TyagiNo ratings yet