Download as pdf or txt
You might also like
- 1976 McCormick. Computability of Global Solutions To Factorable Nonconvex Programs Part I - Convex Underestimating Problems PDFDocument29 pages1976 McCormick. Computability of Global Solutions To Factorable Nonconvex Programs Part I - Convex Underestimating Problems PDFDimitrisSotiropoulosNo ratings yet
- Mirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationDocument9 pagesMirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationfurbyhaterNo ratings yet
- A Model-Trust Region Algorithm Utilizing A Quadratic InterpolantDocument11 pagesA Model-Trust Region Algorithm Utilizing A Quadratic InterpolantCândida MeloNo ratings yet
- Numerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodDocument17 pagesNumerische Mathemaljk: A Globalization Scheme For The Generalized Gauss-Newton MethodMárcioBarbozaNo ratings yet
- Steepest DescentDocument7 pagesSteepest DescentstankccNo ratings yet
- TENSOLVE: A Software Package For Solving Systems of Nonlinear Equations and Nonlinear Least Squares Problems Using Tensor MethodsDocument21 pagesTENSOLVE: A Software Package For Solving Systems of Nonlinear Equations and Nonlinear Least Squares Problems Using Tensor Methodsbarath adhithyaNo ratings yet
- Osculating Parabola and Numerical ExperimentsDocument16 pagesOsculating Parabola and Numerical ExperimentsKolynNo ratings yet
- DownloadDocument7 pagesDownloadnootsamNo ratings yet
- ManuscriptDocument9 pagesManuscriptxfliuNo ratings yet
- Numerical Solutions of The Schrodinger EquationDocument26 pagesNumerical Solutions of The Schrodinger EquationqrrqrbrbrrblbllxNo ratings yet
- Gradient Methods For Minimizing Composite Objective FunctionDocument31 pagesGradient Methods For Minimizing Composite Objective Functionegv2000No ratings yet
- Simulation of Stopped DiffusionsDocument22 pagesSimulation of Stopped DiffusionssupermanvixNo ratings yet
- Ejercicios Gregory Capitulo 14Document5 pagesEjercicios Gregory Capitulo 14Gabriel BonomiNo ratings yet
- Multi-Variable Optimization MethodsDocument21 pagesMulti-Variable Optimization MethodsNeha Randhar DagaNo ratings yet
- Fixed-Point Iteration Based Algorithm For A ClassDocument13 pagesFixed-Point Iteration Based Algorithm For A ClassNick MantzakourasNo ratings yet
- School of Computer Science and Applied MathematicsDocument8 pagesSchool of Computer Science and Applied MathematicsFanta CamaraNo ratings yet
- Directional Secant Method For Nonlinear Equations: Heng-Bin An, Zhong-Zhi BaiDocument14 pagesDirectional Secant Method For Nonlinear Equations: Heng-Bin An, Zhong-Zhi Baisureshpareth8306No ratings yet
- Bayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramaniDocument8 pagesBayesian Monte Carlo: Carl Edward Rasmussen and Zoubin GhahramanifishelderNo ratings yet
- School of Computer Science and Applied MathematicsDocument5 pagesSchool of Computer Science and Applied MathematicsFanta CamaraNo ratings yet
- A New Index Calculus Algorithm With Complexity L (1/4 + o (1) ) in Small CharacteristicDocument23 pagesA New Index Calculus Algorithm With Complexity L (1/4 + o (1) ) in Small Characteristicawais04No ratings yet
- Minka Dirichlet PDFDocument14 pagesMinka Dirichlet PDFFarhan KhawarNo ratings yet
- Lacey Thacker TutorialDocument10 pagesLacey Thacker TutorialWilliam Pinto HernándezNo ratings yet
- Global Convergence of A Trust-Region Sqp-Filter Algorithm For General Nonlinear ProgrammingDocument25 pagesGlobal Convergence of A Trust-Region Sqp-Filter Algorithm For General Nonlinear ProgrammingAndressa PereiraNo ratings yet
- A Truncated Nonmonotone Gauss-Newton Method For Large-Scale Nonlinear Least-Squares ProblemsDocument16 pagesA Truncated Nonmonotone Gauss-Newton Method For Large-Scale Nonlinear Least-Squares ProblemsMárcioBarbozaNo ratings yet
- MCMC With Temporary Mapping and Caching With Application On Gaussian Process RegressionDocument16 pagesMCMC With Temporary Mapping and Caching With Application On Gaussian Process RegressionChunyi WangNo ratings yet
- 2014 ElenaDocument20 pages2014 ElenaHaftuNo ratings yet
- tmpD800 TMPDocument12 pagestmpD800 TMPFrontiersNo ratings yet
- Bellocruz 2016Document19 pagesBellocruz 2016zhongyu xiaNo ratings yet
- Gradient Descent PDFDocument9 pagesGradient Descent PDFbouharaouamanalNo ratings yet
- Beyon BroydenDocument25 pagesBeyon BroydenChristian VerdeNo ratings yet
- 1999 GuntmanDocument29 pages1999 GuntmanFelipeCarraroNo ratings yet
- Monte Carlo Techniques: 32.1. Sampling The Uniform DistributionDocument7 pagesMonte Carlo Techniques: 32.1. Sampling The Uniform DistributionHuu PhuocNo ratings yet
- Fixed Points of Condensing Multivalued Maps in Topological Vector SpacesDocument7 pagesFixed Points of Condensing Multivalued Maps in Topological Vector SpacesDjillali BenamaraNo ratings yet
- A Schur-Padé Algorithm For Fractional Powers of A Matrix: Higham, Nicholas J. and Lin, Lijing 2010Document24 pagesA Schur-Padé Algorithm For Fractional Powers of A Matrix: Higham, Nicholas J. and Lin, Lijing 2010tdtv0204No ratings yet
- Preliminaries: What You Need To Know: Classical DynamicsDocument5 pagesPreliminaries: What You Need To Know: Classical Dynamicsclarkalel1No ratings yet
- Nagel 2022 - Analytic Model For StriplineDocument12 pagesNagel 2022 - Analytic Model For StriplineKundan SumanNo ratings yet
- Wen You Chen 2020Document14 pagesWen You Chen 2020HAFIZ LAWAL IBRAHIMNo ratings yet
- Ridge 3Document4 pagesRidge 3manishnegiiNo ratings yet
- Lect Notes 3Document63 pagesLect Notes 3Safis HajjouzNo ratings yet
- Stable Computation of High Order Gauss Quadrature Rules Using Discretization For Measures in Radiation TransferDocument13 pagesStable Computation of High Order Gauss Quadrature Rules Using Discretization For Measures in Radiation TransfermenormanNo ratings yet
- Dosang Joe and Hyungju Park: Nal Varieties. Rational Parametrizations of The Irreducible ComponentsDocument12 pagesDosang Joe and Hyungju Park: Nal Varieties. Rational Parametrizations of The Irreducible ComponentsMohammad Mofeez AlamNo ratings yet
- Augmentad LagrangeDocument45 pagesAugmentad LagrangeMANOEL BERNARDES DE JESUSNo ratings yet
- Iterative Methods of Richardson-Lucy-type For Image DeblurringDocument15 pagesIterative Methods of Richardson-Lucy-type For Image DeblurringhilmanmuntahaNo ratings yet
- Model Order Reduction Techniques For Damped Vibrating Systems - The Moment Matching ApproachDocument14 pagesModel Order Reduction Techniques For Damped Vibrating Systems - The Moment Matching ApproachRaúl Rodríguez SánchezNo ratings yet
- NIPS 2000 The Kernel Trick For Distances PaperDocument7 pagesNIPS 2000 The Kernel Trick For Distances PaperstiananfinsenNo ratings yet
- Optical TheoremDocument5 pagesOptical TheoremMario PetričevićNo ratings yet
- Schoner TDocument12 pagesSchoner TEpic WinNo ratings yet
- Generalized Pattern Search Methods For A Class of Nonsmooth Optimization Problems With Structure - Bogani (2008)Document11 pagesGeneralized Pattern Search Methods For A Class of Nonsmooth Optimization Problems With Structure - Bogani (2008)Emerson ButynNo ratings yet
- Scattering Matrix in Conformal GeometryDocument30 pagesScattering Matrix in Conformal GeometrybilingsleyNo ratings yet
- Graph EneDocument8 pagesGraph EneNathan PearsonNo ratings yet
- Pages119 137 PDFDocument19 pagesPages119 137 PDFquasemanobrasNo ratings yet
- 1 s2.0 S0747717197901103 MainDocument30 pages1 s2.0 S0747717197901103 MainMerbsTimeline (Merblin)No ratings yet
- Preliminaries: What You Need To Know: Classical DynamicsDocument5 pagesPreliminaries: What You Need To Know: Classical Dynamicsjamescraig229No ratings yet
- Operator Product Expansion in Quantum Field TheoryDocument11 pagesOperator Product Expansion in Quantum Field TheoryDennisNo ratings yet
- Convergence Acceleration of Alternating SeriesDocument10 pagesConvergence Acceleration of Alternating SeriesblablityNo ratings yet
- Aula 7 - Teoria de Cordas MITDocument7 pagesAula 7 - Teoria de Cordas MITErick MouraNo ratings yet
- Course Notes: Week 2.: Math 270C: Applied Numerical Linear AlgebraDocument8 pagesCourse Notes: Week 2.: Math 270C: Applied Numerical Linear AlgebraShwetabh SrivastavaNo ratings yet
- 10.1007@s00498 020 00253 Z PDFDocument23 pages10.1007@s00498 020 00253 Z PDFJessica JaraNo ratings yet
- CHP 1curve FittingDocument21 pagesCHP 1curve FittingAbrar HashmiNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
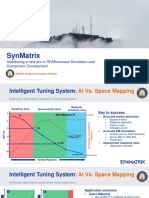
- Synmatrix - SynMatrix AI VS. Space MappingDocument4 pagesSynmatrix - SynMatrix AI VS. Space MappingHüseyin Nuri GülmezNo ratings yet
- An Efficient Surrogate Assisted Particle Swarm Optimization For Antenna SynthesisDocument8 pagesAn Efficient Surrogate Assisted Particle Swarm Optimization For Antenna Synthesishelio_1972No ratings yet
- EM-Based Design of Large-Scale Dielectric-Resonator Filters and Multiplexers by Space MappingDocument7 pagesEM-Based Design of Large-Scale Dielectric-Resonator Filters and Multiplexers by Space MappingvilhuenNo ratings yet
- A Tuning Method For Microwave Filter Via Complex Neural Network and Improved Space MappingDocument7 pagesA Tuning Method For Microwave Filter Via Complex Neural Network and Improved Space MappingAlgerian AissaouiNo ratings yet
- Computational Intelligence in Expensive Optimization Problems (2010) (Attica)Document707 pagesComputational Intelligence in Expensive Optimization Problems (2010) (Attica)Clara50% (2)
- Non Linear Optimization in EENG Lecture - 00Document18 pagesNon Linear Optimization in EENG Lecture - 00Michael Zontche BernardNo ratings yet