
Deflections
Deflections
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Kecman Bending Collapse of Rectangular and Square Section Tubes 1983 International Journal of Mechanical SciencesDocument14 pagesKecman Bending Collapse of Rectangular and Square Section Tubes 1983 International Journal of Mechanical SciencesNhật Vũ100% (2)
- Distillation Column DesignDocument24 pagesDistillation Column DesignBa Tawa Na100% (1)
- Hydro Engineer VietnamDocument3 pagesHydro Engineer VietnamNhật VũNo ratings yet
- Development of A Finite Element Model of The Total Human Model For Safety (Thums) and Application To Car-Pedestrian Impacts Tomoyuki MaenoDocument10 pagesDevelopment of A Finite Element Model of The Total Human Model For Safety (Thums) and Application To Car-Pedestrian Impacts Tomoyuki MaenoNhật VũNo ratings yet
- F C G A7 F C G F F C GDocument4 pagesF C G A7 F C G F F C GNhật VũNo ratings yet
- Development of The MDO Framework For The Helicopter Conceptual DesignDocument9 pagesDevelopment of The MDO Framework For The Helicopter Conceptual DesignNhật VũNo ratings yet
- 22 Online Lifting Line TheoryDocument16 pages22 Online Lifting Line TheoryNhật VũNo ratings yet
- 2.8 LV Type Test ResultDocument375 pages2.8 LV Type Test Resultasifaliabid100% (1)
- Optappl 4302p237 PDFDocument10 pagesOptappl 4302p237 PDFFattihiEkhmalNo ratings yet
- Investigating Corrosion Processes in TheDocument13 pagesInvestigating Corrosion Processes in TheAida VargasNo ratings yet
- Armix Hyye Crete PC30Document3 pagesArmix Hyye Crete PC30Devinder SokhiNo ratings yet
- D 8085 - 17Document5 pagesD 8085 - 17Nguyễn Như ThếNo ratings yet
- Phreatic Line AssignmentDocument7 pagesPhreatic Line AssignmentAnonymous EIjnKecu0JNo ratings yet
- Dip PDFDocument27 pagesDip PDFolenin64No ratings yet
- Uttar PradeshDocument44 pagesUttar PradeshVimal PratapNo ratings yet
- 2.1. Cell Structure and Function of OrganellesDocument66 pages2.1. Cell Structure and Function of OrganellesNama Saya100% (1)
- Chemistry p4Document1,153 pagesChemistry p4hettgamingaccountNo ratings yet
- cHEM 26 LE 1 NOTESDocument3 pagescHEM 26 LE 1 NOTESChrissa GuicoNo ratings yet
- Implementation of The Adventure of Element Game As Learning Media During Covid-19 PandemyDocument8 pagesImplementation of The Adventure of Element Game As Learning Media During Covid-19 PandemyruslyhidayahNo ratings yet
- Model Chemlab Lab Wizard Tutorial: Simulations For The Classroom, Lab and InternetDocument30 pagesModel Chemlab Lab Wizard Tutorial: Simulations For The Classroom, Lab and InternetSumit GhoshNo ratings yet
- API Standard 614 - Lubrication, Shaft-Sealing, and Control-Oil Systems For Special-Purpose ApplicationDocument4 pagesAPI Standard 614 - Lubrication, Shaft-Sealing, and Control-Oil Systems For Special-Purpose ApplicationFabioSalaNo ratings yet
- 02 Kinetic Theory of Gases Practice Problem1Document2 pages02 Kinetic Theory of Gases Practice Problem1DonickGregoryDiengdohNo ratings yet
- Form 4 - Salts (+experiment)Document4 pagesForm 4 - Salts (+experiment)kanryu_zonasNo ratings yet
- Bala 2015Document7 pagesBala 2015LOKESH RATRENo ratings yet
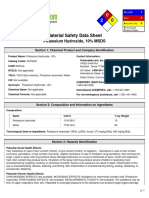
- Msds Reagen Koh 10%Document6 pagesMsds Reagen Koh 10%Rumah Sakit Bhakti Asih BrebesNo ratings yet
- IX CHEMISTRY - T.NOtes - Matter Around Us - SSCDocument6 pagesIX CHEMISTRY - T.NOtes - Matter Around Us - SSChimadhar muddanaNo ratings yet
- Service Manual For Cold RoomsDocument14 pagesService Manual For Cold RoomsDavid NoreñaNo ratings yet
- Water Repellency - Spray TestDocument3 pagesWater Repellency - Spray TestRetno AnggrainiNo ratings yet
- Binder1 PDFDocument454 pagesBinder1 PDFAniket KhotNo ratings yet
- Melpat Ammonium Sulphate Spray Grade: Technical NoteDocument2 pagesMelpat Ammonium Sulphate Spray Grade: Technical NoteViji ThulasiramanNo ratings yet
- Etp Operation MannualDocument3 pagesEtp Operation MannualSanjay100% (1)
- What Is "Wandering" in Literature and Literary Criticism?Document2 pagesWhat Is "Wandering" in Literature and Literary Criticism?Julian ScuttsNo ratings yet
- Tutorial 3 (ME 206)Document2 pagesTutorial 3 (ME 206)deshrajNo ratings yet
- WaterproofingReckoner PDFDocument40 pagesWaterproofingReckoner PDFhelloitskalaiNo ratings yet
- Energy From The Sun Student GuideDocument20 pagesEnergy From The Sun Student GuideCgpscAspirantNo ratings yet
- Hydrogen Crack 1Document17 pagesHydrogen Crack 1muraliNo ratings yet











































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Kecman Bending Collapse of Rectangular and Square Section Tubes 1983 International Journal of Mechanical SciencesDocument14 pagesKecman Bending Collapse of Rectangular and Square Section Tubes 1983 International Journal of Mechanical SciencesNhật Vũ100% (2)
- Distillation Column DesignDocument24 pagesDistillation Column DesignBa Tawa Na100% (1)
- Hydro Engineer VietnamDocument3 pagesHydro Engineer VietnamNhật VũNo ratings yet
- Development of A Finite Element Model of The Total Human Model For Safety (Thums) and Application To Car-Pedestrian Impacts Tomoyuki MaenoDocument10 pagesDevelopment of A Finite Element Model of The Total Human Model For Safety (Thums) and Application To Car-Pedestrian Impacts Tomoyuki MaenoNhật VũNo ratings yet
- F C G A7 F C G F F C GDocument4 pagesF C G A7 F C G F F C GNhật VũNo ratings yet
- Development of The MDO Framework For The Helicopter Conceptual DesignDocument9 pagesDevelopment of The MDO Framework For The Helicopter Conceptual DesignNhật VũNo ratings yet
- 22 Online Lifting Line TheoryDocument16 pages22 Online Lifting Line TheoryNhật VũNo ratings yet
- 2.8 LV Type Test ResultDocument375 pages2.8 LV Type Test Resultasifaliabid100% (1)
- Optappl 4302p237 PDFDocument10 pagesOptappl 4302p237 PDFFattihiEkhmalNo ratings yet
- Investigating Corrosion Processes in TheDocument13 pagesInvestigating Corrosion Processes in TheAida VargasNo ratings yet
- Armix Hyye Crete PC30Document3 pagesArmix Hyye Crete PC30Devinder SokhiNo ratings yet
- D 8085 - 17Document5 pagesD 8085 - 17Nguyễn Như ThếNo ratings yet
- Phreatic Line AssignmentDocument7 pagesPhreatic Line AssignmentAnonymous EIjnKecu0JNo ratings yet
- Dip PDFDocument27 pagesDip PDFolenin64No ratings yet
- Uttar PradeshDocument44 pagesUttar PradeshVimal PratapNo ratings yet
- 2.1. Cell Structure and Function of OrganellesDocument66 pages2.1. Cell Structure and Function of OrganellesNama Saya100% (1)
- Chemistry p4Document1,153 pagesChemistry p4hettgamingaccountNo ratings yet
- cHEM 26 LE 1 NOTESDocument3 pagescHEM 26 LE 1 NOTESChrissa GuicoNo ratings yet
- Implementation of The Adventure of Element Game As Learning Media During Covid-19 PandemyDocument8 pagesImplementation of The Adventure of Element Game As Learning Media During Covid-19 PandemyruslyhidayahNo ratings yet
- Model Chemlab Lab Wizard Tutorial: Simulations For The Classroom, Lab and InternetDocument30 pagesModel Chemlab Lab Wizard Tutorial: Simulations For The Classroom, Lab and InternetSumit GhoshNo ratings yet
- API Standard 614 - Lubrication, Shaft-Sealing, and Control-Oil Systems For Special-Purpose ApplicationDocument4 pagesAPI Standard 614 - Lubrication, Shaft-Sealing, and Control-Oil Systems For Special-Purpose ApplicationFabioSalaNo ratings yet
- 02 Kinetic Theory of Gases Practice Problem1Document2 pages02 Kinetic Theory of Gases Practice Problem1DonickGregoryDiengdohNo ratings yet
- Form 4 - Salts (+experiment)Document4 pagesForm 4 - Salts (+experiment)kanryu_zonasNo ratings yet
- Bala 2015Document7 pagesBala 2015LOKESH RATRENo ratings yet
- Msds Reagen Koh 10%Document6 pagesMsds Reagen Koh 10%Rumah Sakit Bhakti Asih BrebesNo ratings yet
- IX CHEMISTRY - T.NOtes - Matter Around Us - SSCDocument6 pagesIX CHEMISTRY - T.NOtes - Matter Around Us - SSChimadhar muddanaNo ratings yet
- Service Manual For Cold RoomsDocument14 pagesService Manual For Cold RoomsDavid NoreñaNo ratings yet
- Water Repellency - Spray TestDocument3 pagesWater Repellency - Spray TestRetno AnggrainiNo ratings yet
- Binder1 PDFDocument454 pagesBinder1 PDFAniket KhotNo ratings yet
- Melpat Ammonium Sulphate Spray Grade: Technical NoteDocument2 pagesMelpat Ammonium Sulphate Spray Grade: Technical NoteViji ThulasiramanNo ratings yet
- Etp Operation MannualDocument3 pagesEtp Operation MannualSanjay100% (1)
- What Is "Wandering" in Literature and Literary Criticism?Document2 pagesWhat Is "Wandering" in Literature and Literary Criticism?Julian ScuttsNo ratings yet
- Tutorial 3 (ME 206)Document2 pagesTutorial 3 (ME 206)deshrajNo ratings yet
- WaterproofingReckoner PDFDocument40 pagesWaterproofingReckoner PDFhelloitskalaiNo ratings yet
- Energy From The Sun Student GuideDocument20 pagesEnergy From The Sun Student GuideCgpscAspirantNo ratings yet
- Hydrogen Crack 1Document17 pagesHydrogen Crack 1muraliNo ratings yet