
Optical Flow
Optical Flow
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Corporate Finance Solution Manual by Ross, Westerfield and JordernDocument12 pagesCorporate Finance Solution Manual by Ross, Westerfield and JordernBabar AdeebNo ratings yet
- Scania DC13 - Industrial Engine - PDF Installation ManualDocument39 pagesScania DC13 - Industrial Engine - PDF Installation ManualGem RNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tiffany Shoham - UntitledDocument2 pagesTiffany Shoham - Untitledknoblock_michaelNo ratings yet
- Sp@Nner FBTC ScriptDocument8 pagesSp@Nner FBTC ScriptSathish KumarNo ratings yet
- DLLec5b NotesDocument4 pagesDLLec5b NotesChintan MandalNo ratings yet
- 2 Operations On PolynomialsDocument5 pages2 Operations On Polynomialsapi-304499560No ratings yet
- SD Invoice Split From Sales OrderDocument3 pagesSD Invoice Split From Sales Order曹龙No ratings yet
- Datasheet PDFDocument2 pagesDatasheet PDFBarkat HussainNo ratings yet
- JBL tn-OACDDocument4 pagesJBL tn-OACDRoland HendriksNo ratings yet
- GT Docs 8Document99 pagesGT Docs 8Paul WallNo ratings yet
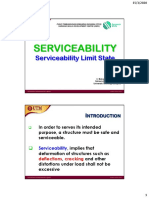
- Serviceability Limit StateDocument12 pagesServiceability Limit StateMohamad Salleh YassinNo ratings yet
- Index of Final Project Debott 2Document287 pagesIndex of Final Project Debott 2p2pcreepNo ratings yet
- Decay of Radioactivity: Robert Miyaoka, PHDDocument9 pagesDecay of Radioactivity: Robert Miyaoka, PHDTieku NobleNo ratings yet
- Chapter Five Network Items SpecificationDocument37 pagesChapter Five Network Items SpecificationPro NebyuNo ratings yet
- Data Center Cooling StrategiesDocument17 pagesData Center Cooling Strategiesirfanbaig36100% (1)
- NMR-1 BasicDocument52 pagesNMR-1 Basicamit086No ratings yet
- Line Protection: Return To Main IndexDocument44 pagesLine Protection: Return To Main IndexAli RazaNo ratings yet
- OverheadsDocument22 pagesOverheadsOlha LNo ratings yet
- Geo 1111Document66 pagesGeo 1111Arumit KayasthaNo ratings yet
- MATH - Q2 - W3 (Autosaved)Document44 pagesMATH - Q2 - W3 (Autosaved)Rose Amor Mercene-LacayNo ratings yet
- Borri B400 Datasheet Com5Document2 pagesBorri B400 Datasheet Com5Anonymous RlEl9pZFbtNo ratings yet
- Application of QWBA and Short-Lived Isotopes in The Drug Development ParadigmDocument2 pagesApplication of QWBA and Short-Lived Isotopes in The Drug Development ParadigmsandragiaNo ratings yet
- Servicing BrakesDocument33 pagesServicing BrakesJoe Vane Niñal AntifuestoNo ratings yet
- Lighting in Interior DesignDocument17 pagesLighting in Interior DesignEric MagnayeNo ratings yet
- Game Catalog-Casillas LeilaniDocument7 pagesGame Catalog-Casillas LeilaniLeilani CasillasNo ratings yet
- ABB Technical Application Papers - Vol. 2 MVLV Transformer SubstationsDocument42 pagesABB Technical Application Papers - Vol. 2 MVLV Transformer SubstationsASM_213No ratings yet
- Upgrading To Windows 8.1: A Guide For Windows 7 UsersDocument9 pagesUpgrading To Windows 8.1: A Guide For Windows 7 UsersShoiimuL MohamadNo ratings yet
- DE+MPLAB AssignmentDocument8 pagesDE+MPLAB AssignmentBeena ShettyNo ratings yet
- ANSYS Workbench - Simulation Introduction: Training ManualDocument4 pagesANSYS Workbench - Simulation Introduction: Training ManualShamik ChowdhuryNo ratings yet
- G 70V3 InstructionDocument3 pagesG 70V3 InstructionattitakNo ratings yet




































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Corporate Finance Solution Manual by Ross, Westerfield and JordernDocument12 pagesCorporate Finance Solution Manual by Ross, Westerfield and JordernBabar AdeebNo ratings yet
- Scania DC13 - Industrial Engine - PDF Installation ManualDocument39 pagesScania DC13 - Industrial Engine - PDF Installation ManualGem RNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tiffany Shoham - UntitledDocument2 pagesTiffany Shoham - Untitledknoblock_michaelNo ratings yet
- Sp@Nner FBTC ScriptDocument8 pagesSp@Nner FBTC ScriptSathish KumarNo ratings yet
- DLLec5b NotesDocument4 pagesDLLec5b NotesChintan MandalNo ratings yet
- 2 Operations On PolynomialsDocument5 pages2 Operations On Polynomialsapi-304499560No ratings yet
- SD Invoice Split From Sales OrderDocument3 pagesSD Invoice Split From Sales Order曹龙No ratings yet
- Datasheet PDFDocument2 pagesDatasheet PDFBarkat HussainNo ratings yet
- JBL tn-OACDDocument4 pagesJBL tn-OACDRoland HendriksNo ratings yet
- GT Docs 8Document99 pagesGT Docs 8Paul WallNo ratings yet
- Serviceability Limit StateDocument12 pagesServiceability Limit StateMohamad Salleh YassinNo ratings yet
- Index of Final Project Debott 2Document287 pagesIndex of Final Project Debott 2p2pcreepNo ratings yet
- Decay of Radioactivity: Robert Miyaoka, PHDDocument9 pagesDecay of Radioactivity: Robert Miyaoka, PHDTieku NobleNo ratings yet
- Chapter Five Network Items SpecificationDocument37 pagesChapter Five Network Items SpecificationPro NebyuNo ratings yet
- Data Center Cooling StrategiesDocument17 pagesData Center Cooling Strategiesirfanbaig36100% (1)
- NMR-1 BasicDocument52 pagesNMR-1 Basicamit086No ratings yet
- Line Protection: Return To Main IndexDocument44 pagesLine Protection: Return To Main IndexAli RazaNo ratings yet
- OverheadsDocument22 pagesOverheadsOlha LNo ratings yet
- Geo 1111Document66 pagesGeo 1111Arumit KayasthaNo ratings yet
- MATH - Q2 - W3 (Autosaved)Document44 pagesMATH - Q2 - W3 (Autosaved)Rose Amor Mercene-LacayNo ratings yet
- Borri B400 Datasheet Com5Document2 pagesBorri B400 Datasheet Com5Anonymous RlEl9pZFbtNo ratings yet
- Application of QWBA and Short-Lived Isotopes in The Drug Development ParadigmDocument2 pagesApplication of QWBA and Short-Lived Isotopes in The Drug Development ParadigmsandragiaNo ratings yet
- Servicing BrakesDocument33 pagesServicing BrakesJoe Vane Niñal AntifuestoNo ratings yet
- Lighting in Interior DesignDocument17 pagesLighting in Interior DesignEric MagnayeNo ratings yet
- Game Catalog-Casillas LeilaniDocument7 pagesGame Catalog-Casillas LeilaniLeilani CasillasNo ratings yet
- ABB Technical Application Papers - Vol. 2 MVLV Transformer SubstationsDocument42 pagesABB Technical Application Papers - Vol. 2 MVLV Transformer SubstationsASM_213No ratings yet
- Upgrading To Windows 8.1: A Guide For Windows 7 UsersDocument9 pagesUpgrading To Windows 8.1: A Guide For Windows 7 UsersShoiimuL MohamadNo ratings yet
- DE+MPLAB AssignmentDocument8 pagesDE+MPLAB AssignmentBeena ShettyNo ratings yet
- ANSYS Workbench - Simulation Introduction: Training ManualDocument4 pagesANSYS Workbench - Simulation Introduction: Training ManualShamik ChowdhuryNo ratings yet
- G 70V3 InstructionDocument3 pagesG 70V3 InstructionattitakNo ratings yet