Download as pdf or txt
You might also like
- Suzuki Swift Diagrama PDFDocument18 pagesSuzuki Swift Diagrama PDFXavier Calvache75% (8)
- Case Analysis HP Compaq The Merger DecisionDocument12 pagesCase Analysis HP Compaq The Merger DecisionPreemnath Katare100% (2)
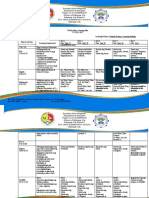
- DLP-agriculture Grade 11Document3 pagesDLP-agriculture Grade 11Eden Shen Sumilay100% (6)
- Electric Power Systems Research: SciencedirectDocument10 pagesElectric Power Systems Research: SciencedirectAli SaeedNo ratings yet
- Smart Dust Mote Core ArchitectureDocument5 pagesSmart Dust Mote Core ArchitectureAce MaheswaranNo ratings yet
- Smart Dust Core ArchitectureDocument10 pagesSmart Dust Core Architecturesanju789No ratings yet
- Energies: Adaptive Wide-Area Damping Control Scheme For Smart Grids With Consideration of Signal Time DelayDocument18 pagesEnergies: Adaptive Wide-Area Damping Control Scheme For Smart Grids With Consideration of Signal Time Delaycontrol_613No ratings yet
- aUTOMATIC METERINGDocument12 pagesaUTOMATIC METERINGGSK MuhammadNo ratings yet
- CDMADocument12 pagesCDMAManoj MoharanaNo ratings yet
- CIRED2015 0004 Final PDFDocument5 pagesCIRED2015 0004 Final PDFhanaa KarawiaNo ratings yet
- Improved Energy Efficient ADCC For Home Automation Networks in High Volume Sensed DataDocument9 pagesImproved Energy Efficient ADCC For Home Automation Networks in High Volume Sensed DataJournal of Computer ApplicationsNo ratings yet
- Dcoss09 Submission 49Document14 pagesDcoss09 Submission 49smguruNo ratings yet
- A Novel Islanding Detection Method Based On Transfer Learning Technique Using VGG16 NetworkDocument6 pagesA Novel Islanding Detection Method Based On Transfer Learning Technique Using VGG16 NetworkBushra RafiaNo ratings yet
- 3D Mesh Networking For IoTDocument11 pages3D Mesh Networking For IoTДжондо АнанимидзеNo ratings yet
- Differential Equation Fault Location Algorithm With Harmonic Effects in Power SystemDocument11 pagesDifferential Equation Fault Location Algorithm With Harmonic Effects in Power SystemTELKOMNIKANo ratings yet
- A Data Aggregation Approach Exploiting Spatial and Temporal Correlation Among Sensor Data in Wireless Sensor NetworksDocument5 pagesA Data Aggregation Approach Exploiting Spatial and Temporal Correlation Among Sensor Data in Wireless Sensor NetworksManno ChNo ratings yet
- Power Imbalance Application Region Method For Distributed Synchronous Generator Anti-Islanding Protection Design and EvaluationDocument9 pagesPower Imbalance Application Region Method For Distributed Synchronous Generator Anti-Islanding Protection Design and Evaluationabdulkadir aliNo ratings yet
- Performance Evaluation of A Volcano Monitoring System Using Wireless Sensor NetworksDocument7 pagesPerformance Evaluation of A Volcano Monitoring System Using Wireless Sensor NetworksPato GeovannyNo ratings yet
- energies-12-00617 (1)Document17 pagesenergies-12-00617 (1)Mohd ZuhaibNo ratings yet
- ChiomaDocument15 pagesChiomasteve rolansNo ratings yet
- 06-The Study of CFAR - Constant False Alarm Rate - Process FoDocument6 pages06-The Study of CFAR - Constant False Alarm Rate - Process FofaizazohraNo ratings yet
- Monitoring Overvoltages in Underground HV Cable Distribution NetworksDocument6 pagesMonitoring Overvoltages in Underground HV Cable Distribution NetworkslalindadefNo ratings yet
- Energy-E Cient Secured Data Reduction Technique Using Image Difference Function in Wireless Video Sensor NetworksDocument19 pagesEnergy-E Cient Secured Data Reduction Technique Using Image Difference Function in Wireless Video Sensor NetworksahmedNo ratings yet
- Sensors: Performance Analysis of Cooperative Virtual MIMO Systems For Wireless Sensor NetworksDocument20 pagesSensors: Performance Analysis of Cooperative Virtual MIMO Systems For Wireless Sensor NetworksshanriyanNo ratings yet
- Phasor Measurement Unit Technology and ItsDocument4 pagesPhasor Measurement Unit Technology and ItsVedaste NdayishimiyeNo ratings yet
- Background Noise Floor Measurements and Cells Planning For WCDMA SystemDocument5 pagesBackground Noise Floor Measurements and Cells Planning For WCDMA SystemsrikandiujungNo ratings yet
- Gps Clock Scada SystemDocument4 pagesGps Clock Scada SystemCindyNo ratings yet
- A Wireless Sensor Network For Precision Agriculture and Its PerformanceDocument17 pagesA Wireless Sensor Network For Precision Agriculture and Its PerformanceAxl Umbra EGNo ratings yet
- Modeling and Anylysis of Power Line Communications for Application in Smart Grid - КондрашовDocument6 pagesModeling and Anylysis of Power Line Communications for Application in Smart Grid - КондрашовlarisszaNo ratings yet
- Fmc-Tech LTD.: X-NetDocument4 pagesFmc-Tech LTD.: X-NetSpongebob57No ratings yet
- Noise Analysis and Characterization of A Sigma-Delta Capacitive MicroaccelerometerDocument10 pagesNoise Analysis and Characterization of A Sigma-Delta Capacitive MicroaccelerometerAlex WongNo ratings yet
- PQ AlgorithmDocument17 pagesPQ AlgorithmrameshNo ratings yet
- Digital BeamformingDocument9 pagesDigital Beamforming김성환No ratings yet
- Power Quality Monitoring Using Transient Analysis in LV Power Distribution Network - A Case StudyDocument5 pagesPower Quality Monitoring Using Transient Analysis in LV Power Distribution Network - A Case Studygopal krishnanNo ratings yet
- IJEAS0208002Document6 pagesIJEAS0208002erpublicationNo ratings yet
- DIGITAL SUBSTATION - Tests of Process Bus With GIS Non Conventional Instrument TransformersDocument10 pagesDIGITAL SUBSTATION - Tests of Process Bus With GIS Non Conventional Instrument Transformersraghavendran raghuNo ratings yet
- Ant Colony Optimization For Improving Network Lifetime in Wireless Sensor NetworksDocument7 pagesAnt Colony Optimization For Improving Network Lifetime in Wireless Sensor NetworksInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- CIGRE Artificial Intelligence Applied To Explore The Causes of Transmission Line FaultsDocument9 pagesCIGRE Artificial Intelligence Applied To Explore The Causes of Transmission Line FaultsMalik Shoaib khalidNo ratings yet
- Busbar Protection - A ReviewDocument5 pagesBusbar Protection - A ReviewPrajiWazharyNo ratings yet
- Optimization of Anycast Packet Forwarding Approach For WSNDocument8 pagesOptimization of Anycast Packet Forwarding Approach For WSNInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Electronics: Ffective PCB Decoupling Optimization byDocument17 pagesElectronics: Ffective PCB Decoupling Optimization byAmir KhanNo ratings yet
- Implementation of An Application For The Time-Spectral Analysis of Supra-Harmonic Interferences in Smart GridsDocument4 pagesImplementation of An Application For The Time-Spectral Analysis of Supra-Harmonic Interferences in Smart GridsAnaraida Garcia BaigorriNo ratings yet
- Efficiency ComparisonDocument6 pagesEfficiency ComparisonSreeja SujithNo ratings yet
- Wireless Sensor Network of 3 - Bit ADCDocument6 pagesWireless Sensor Network of 3 - Bit ADCAnonymous izrFWiQNo ratings yet
- Wavelet Feature Based Fault Detection and Classification Technique For Transmission Line ProtectionDocument7 pagesWavelet Feature Based Fault Detection and Classification Technique For Transmission Line ProtectionGRD JournalsNo ratings yet
- SynaptiQ User Manual - Annex C Simulation Framework DescriptionDocument10 pagesSynaptiQ User Manual - Annex C Simulation Framework DescriptionFilipe MonteiroNo ratings yet
- Automated Meter Reading and SCADA Application For Wireless Sensor NetworkDocument12 pagesAutomated Meter Reading and SCADA Application For Wireless Sensor NetworkliameiNo ratings yet
- Flip-Flop Grouping in Data-Driven Clock Gating: Varghese James A, Divya S, Seena GeorgeDocument9 pagesFlip-Flop Grouping in Data-Driven Clock Gating: Varghese James A, Divya S, Seena GeorgeDigvijay ReddyNo ratings yet
- MDIw MTQ5 OADocument5 pagesMDIw MTQ5 OAPandurang GurakheNo ratings yet
- 98 e Aci 136Document7 pages98 e Aci 136Mohamad AlimadadiNo ratings yet
- Fast and Distortion-Free Short-Circuit Detection and Protection Scheme With Fault Ride-Through Capability Applied To Four-Leg VSIDocument12 pagesFast and Distortion-Free Short-Circuit Detection and Protection Scheme With Fault Ride-Through Capability Applied To Four-Leg VSIGuillermo GarciaNo ratings yet
- A Review On Fault Detection and Allocation Techniques in Power SystemDocument4 pagesA Review On Fault Detection and Allocation Techniques in Power SystemSatyendra Pratap SinghNo ratings yet
- FPGA Imlementation of Carrier Synchronization For QAMDocument15 pagesFPGA Imlementation of Carrier Synchronization For QAMCarlos CarriNo ratings yet
- Protection of Transmission Line Using GPSDocument11 pagesProtection of Transmission Line Using GPSRohit GandhiNo ratings yet
- An 11.1 Gbps Analog PRML Receiver For Electronic Dispersion Compensation of Fiber Optic CommunicationsDocument16 pagesAn 11.1 Gbps Analog PRML Receiver For Electronic Dispersion Compensation of Fiber Optic CommunicationsGbarbarNo ratings yet
- Real-Time Power Flow Monitoring and Control System For Microgrids Integration in Islanded ScenariosDocument12 pagesReal-Time Power Flow Monitoring and Control System For Microgrids Integration in Islanded ScenariosVitovich DittaNo ratings yet
- Novel QPSK Modulation For DWDM Free Space Optical Communication SystemDocument6 pagesNovel QPSK Modulation For DWDM Free Space Optical Communication SystemLương Xuân DẫnNo ratings yet
- Distributed SystemDocument15 pagesDistributed Systemvijay9994No ratings yet
- CIRED2011 1286 Final Universidad de OviedoDocument4 pagesCIRED2011 1286 Final Universidad de OviedopipotxNo ratings yet
- Filters That Remember: Duty Cycling Analog Circuits For Long Term Medical MonitoringDocument10 pagesFilters That Remember: Duty Cycling Analog Circuits For Long Term Medical MonitoringMoumen DerouicheNo ratings yet
- Metode Monitoring Trafo DistributionDocument5 pagesMetode Monitoring Trafo DistributionSiswoyo SuwidjiNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- WebRTC SIP Gateway Doc PDFDocument44 pagesWebRTC SIP Gateway Doc PDFMicroshare Software SolutionsNo ratings yet
- Hydrotreating & Hydrocracking Process Technology Training Course - PetroKnowledgeDocument3 pagesHydrotreating & Hydrocracking Process Technology Training Course - PetroKnowledgenishilgeorgeNo ratings yet
- Summed Area TablesDocument29 pagesSummed Area TablesDhillonvNo ratings yet
- Dubai Police Traffic Fines ListDocument10 pagesDubai Police Traffic Fines ListHashimNo ratings yet
- Products Standardization in Oil & Gas Sector in IndiaDocument39 pagesProducts Standardization in Oil & Gas Sector in Indiakingking21177No ratings yet
- Sto. Nino Elementary SchoolDocument12 pagesSto. Nino Elementary SchoolMackie BarcebalNo ratings yet
- Physics Heat Solution PDFDocument4 pagesPhysics Heat Solution PDFsiba padhy100% (1)
- Computer Aided Design and Drafting of Helical GearsDocument10 pagesComputer Aided Design and Drafting of Helical GearsmofiyinfoluNo ratings yet
- High Speed Sand Filters Filtres À Sable Rapide Filtros A Silex de Alta Velocidad Filtri A Sabbia Ad Alta Velocitá Sandfilter Filtros de Areia de Alta VelocidadeDocument60 pagesHigh Speed Sand Filters Filtres À Sable Rapide Filtros A Silex de Alta Velocidad Filtri A Sabbia Ad Alta Velocitá Sandfilter Filtros de Areia de Alta VelocidadestewartNo ratings yet
- Ebook Opengl DistilledDocument250 pagesEbook Opengl Distilledpl363tch100% (3)
- Conference ScheduleDocument2 pagesConference ScheduleAli RazaNo ratings yet
- Understanding STC and Measuring Sound Loss - Soundproofing CompanyDocument7 pagesUnderstanding STC and Measuring Sound Loss - Soundproofing CompanytaliagcNo ratings yet
- LS Sintered Metal Spur GearsDocument2 pagesLS Sintered Metal Spur Gearsdindo_waeNo ratings yet
- BBU3900 User Guide V400R006 03Document174 pagesBBU3900 User Guide V400R006 03azamat1986No ratings yet
- QCL Lecture LongDocument160 pagesQCL Lecture Longss626No ratings yet
- Analysis of Pile Foundation Subjected To Lateral and Vertical Loads-3Document5 pagesAnalysis of Pile Foundation Subjected To Lateral and Vertical Loads-3squakeNo ratings yet
- Cat Bpe PDFDocument57 pagesCat Bpe PDFJohnNo ratings yet
- Reasoning in AiDocument14 pagesReasoning in AipriyankaNo ratings yet
- Vapour Power Cycles - 275Document53 pagesVapour Power Cycles - 275aditya yadavNo ratings yet
- HackSpaceMag17 PDFDocument132 pagesHackSpaceMag17 PDFEric Nevermore MargayNo ratings yet
- Common Mode Filter Inductor Analysis: Frequency (MHZ)Document7 pagesCommon Mode Filter Inductor Analysis: Frequency (MHZ)HoangNguyenNo ratings yet
- Cluster University of Jammu: (Examination To Be Held in 2017, 2018 and 2019) TitleDocument2 pagesCluster University of Jammu: (Examination To Be Held in 2017, 2018 and 2019) Titlekick singhNo ratings yet
- Standard Label MW Ioh 2022Document11 pagesStandard Label MW Ioh 2022Febry Hisbullah NurmanNo ratings yet
- Scalable OpenSource StorageDocument31 pagesScalable OpenSource Storagejweb911No ratings yet
- 01.2 Small-Cell Report - Full ReportDocument31 pages01.2 Small-Cell Report - Full Reportwalia_anujNo ratings yet
- Oracle®Solaris ZFSAdministration GuideDocument332 pagesOracle®Solaris ZFSAdministration GuideParashar SinghNo ratings yet
- JVC Av-N29f46 SCHDocument11 pagesJVC Av-N29f46 SCH92borisNo ratings yet