Download as docx, pdf, or txt
You might also like
- Principles of Modern Radar Answers To Selected ProblemsDocument6 pagesPrinciples of Modern Radar Answers To Selected Problemsrisovi100% (1)
- Answers Sample Exam Questions Set 2Document11 pagesAnswers Sample Exam Questions Set 2dwiaryantaNo ratings yet
- Assignment 2Document6 pagesAssignment 2Arun UpadhyayaNo ratings yet
- Radar Marking Scheme 2017Document7 pagesRadar Marking Scheme 2017Mukeshimana ElieNo ratings yet
- Appendix D Link CalculationsDocument5 pagesAppendix D Link CalculationsSuale Sole KaungaNo ratings yet
- OFC Design ExamplesDocument8 pagesOFC Design Examplesbkmmizan0% (1)
- Ijret - Comparison of Various Noise Mitigation Technique Used With Clipping For Reduction of Papr in OfdmDocument7 pagesIjret - Comparison of Various Noise Mitigation Technique Used With Clipping For Reduction of Papr in OfdmInternational Journal of Research in Engineering and TechnologyNo ratings yet
- 09-TOF ImagingDocument18 pages09-TOF ImagingasdfasdfsafdasfsaNo ratings yet
- FMCW Radar Is A Special Type of Radar Sensor Which Radiates: Frequency-Modulated Continuous-Wave RadarDocument8 pagesFMCW Radar Is A Special Type of Radar Sensor Which Radiates: Frequency-Modulated Continuous-Wave RadarSummer KoNo ratings yet
- A Wideband Digital Beamforming Method Based On Stretch ProcessingDocument10 pagesA Wideband Digital Beamforming Method Based On Stretch Processingsukanya_13No ratings yet
- ATBD DPR 201708 Whole 1Document81 pagesATBD DPR 201708 Whole 1Maxi GarzonNo ratings yet
- Experiment No.3 Simple Half-Wave Dipole Antenna Design Using CST Microwave Studio SuiteDocument5 pagesExperiment No.3 Simple Half-Wave Dipole Antenna Design Using CST Microwave Studio Suiteali salehNo ratings yet
- LiDAR 2Document4 pagesLiDAR 2Jeferson Tondo AlvesNo ratings yet
- R Rec M.1580 0 200207 S!!PDF eDocument28 pagesR Rec M.1580 0 200207 S!!PDF ebinoNo ratings yet
- Introduction To Wireless and Cellular Unit 3 - Wireless Propagation and Cellular ConceptsDocument5 pagesIntroduction To Wireless and Cellular Unit 3 - Wireless Propagation and Cellular ConceptsbirarimaheshNo ratings yet
- Pulse Doppler Radars: 5.1 Analysis of A Simple Pulse Doppler Radar: Fixed Station, Low PRF (No Range Ambiguity)Document29 pagesPulse Doppler Radars: 5.1 Analysis of A Simple Pulse Doppler Radar: Fixed Station, Low PRF (No Range Ambiguity)uranub8488No ratings yet
- LTE Link BudgetDocument7 pagesLTE Link BudgetChidhuro OwenNo ratings yet
- Microwave Communication & Wave GuidesDocument46 pagesMicrowave Communication & Wave GuidesMahmoud DoughanNo ratings yet
- 1 Patch Antenna: To Design A Patch Antenna at 2.4 GHZ and Simulate The Performance Using AdsDocument9 pages1 Patch Antenna: To Design A Patch Antenna at 2.4 GHZ and Simulate The Performance Using AdsNaga LakshmaiahNo ratings yet
- 01 IntroductionDocument8 pages01 IntroductionWiccioNo ratings yet
- Exam I SolutionsDocument4 pagesExam I SolutionsEdon DergutiNo ratings yet
- Radio Propagation and Propagation Path Loss ModelsDocument42 pagesRadio Propagation and Propagation Path Loss ModelsNoshin FaiyroozNo ratings yet
- Microwave Applications and MeasurementsDocument3 pagesMicrowave Applications and MeasurementsthabisoNo ratings yet
- Tshwane University of Technology: Radio Engineering IVDocument11 pagesTshwane University of Technology: Radio Engineering IVDruza MagolegoNo ratings yet
- Exercise 4 - Ans - OnlyDocument2 pagesExercise 4 - Ans - OnlyEng AbdiRahim Khalif AliNo ratings yet
- Chapter 8 System DesignDocument28 pagesChapter 8 System DesignMark BrownNo ratings yet
- Spectral Analysis: P Fundamental 3.162 MW P2 10 Uw P3 31 NW PT 3.172 MWDocument12 pagesSpectral Analysis: P Fundamental 3.162 MW P2 10 Uw P3 31 NW PT 3.172 MWAdrianNo ratings yet
- Final ExamDocument7 pagesFinal ExamSuleman Jamil0% (1)
- Boldface Indicates Parameters To Enter, Other Parameters Are Calculated by Formula and Should Be Left AloneDocument6 pagesBoldface Indicates Parameters To Enter, Other Parameters Are Calculated by Formula and Should Be Left AloneAnhTamNo ratings yet
- Sensors 18 02831Document11 pagesSensors 18 02831FAISAL RAHIMNo ratings yet
- Design and Analysis of 1.28 Terabit/s DWDM Transmission SystemDocument14 pagesDesign and Analysis of 1.28 Terabit/s DWDM Transmission SystemMoazzam TiwanaNo ratings yet
- Digital Coherent Detection of Multi-GigabitDocument2 pagesDigital Coherent Detection of Multi-GigabitAbdelgader AbdallaNo ratings yet
- Opt Com Prob Set 3Document2 pagesOpt Com Prob Set 3Vidya GaneshNo ratings yet
- Micro-Doppler and Vibrometry at Millimeter and Sub-Millimeter WavelengthsDocument8 pagesMicro-Doppler and Vibrometry at Millimeter and Sub-Millimeter WavelengthsRobin JamesNo ratings yet
- Microwave CommunicationsDocument79 pagesMicrowave CommunicationsKatyrynne GarciaNo ratings yet
- Eusipco2009 FinaleDocument5 pagesEusipco2009 FinalenahelaAliNo ratings yet
- Link Budget CalculatorDocument96 pagesLink Budget CalculatorMharlon Aladen100% (1)
- Analog To Digital Converter: A Key Concept in The Implementation of A 3G Software Defined Radio ReceiverDocument7 pagesAnalog To Digital Converter: A Key Concept in The Implementation of A 3G Software Defined Radio ReceiverSatadal GuptaNo ratings yet
- Poc 1 QpsolnDocument43 pagesPoc 1 QpsolnMaiboob GulejangaNo ratings yet
- 07 FDD LTE Radio Link Budget 75Document74 pages07 FDD LTE Radio Link Budget 75Tharindu Wijegoonasekara75% (4)
- Ee-323 Digital Signal Processing Complex Engineering Problem (Cep)Document23 pagesEe-323 Digital Signal Processing Complex Engineering Problem (Cep)Rubina KhattakNo ratings yet
- Microwave Communication PrincipleDocument47 pagesMicrowave Communication Principleanimshakya100% (1)
- Design and Fpga Implementation of Digital Pulse Compression For Band-Pass Radar SignalsDocument5 pagesDesign and Fpga Implementation of Digital Pulse Compression For Band-Pass Radar SignalsSantoso IbnutoroNo ratings yet
- Network PlanningDocument76 pagesNetwork PlanningAhmed GamalNo ratings yet
- Pulse CompressionDocument40 pagesPulse CompressionprasathNo ratings yet
- Martin J. King - Section 2.0 - Construction and Measurement of A Simple Test Transmission LineDocument10 pagesMartin J. King - Section 2.0 - Construction and Measurement of A Simple Test Transmission LineDouglasNo ratings yet
- 2.1 RF Link Budget DescriptionDocument6 pages2.1 RF Link Budget DescriptionChetan BhatNo ratings yet
- Wavelet Basics PDFDocument16 pagesWavelet Basics PDFArun RajendranNo ratings yet
- Adesoji Lawal Radio Propagation Model Tunning2Document13 pagesAdesoji Lawal Radio Propagation Model Tunning2esojayNo ratings yet
- UTS - LukyDocument3 pagesUTS - LukyandanetzNo ratings yet
- Microwave Link Design FinalDocument18 pagesMicrowave Link Design FinalKinaNo ratings yet
- Dispersion CompensationDocument3 pagesDispersion Compensationhernanes13No ratings yet
- Radar Basic TheoryDocument61 pagesRadar Basic TheoryzakiannuarNo ratings yet
- Coherent Detection For Optical Communications Using Digital Signal ProcessingDocument36 pagesCoherent Detection For Optical Communications Using Digital Signal ProcessingK100% (1)
- Signal Digitization in DSPDocument5 pagesSignal Digitization in DSPegaupc2123No ratings yet
- S-72.610 Mobile Communications Services and Systems Tutorial 4, December 3, 2004Document14 pagesS-72.610 Mobile Communications Services and Systems Tutorial 4, December 3, 2004Chandra GalajuNo ratings yet
- 3-Low-Complexity Joint Range and Doppler FMCW Radar Algorithm Based On Number of TargetsDocument14 pages3-Low-Complexity Joint Range and Doppler FMCW Radar Algorithm Based On Number of TargetsPAULO CÉSAR RIBEIRO MARCIANONo ratings yet
- Reverberation Chambers: Theory and Applications to EMC and Antenna MeasurementsFrom EverandReverberation Chambers: Theory and Applications to EMC and Antenna MeasurementsNo ratings yet
- Advanced Multicarrier Technologies for Future Radio Communication: 5G and BeyondFrom EverandAdvanced Multicarrier Technologies for Future Radio Communication: 5G and BeyondNo ratings yet
- Ultra-Wideband Antennas and Propagation: For Communications, Radar and ImagingFrom EverandUltra-Wideband Antennas and Propagation: For Communications, Radar and ImagingNo ratings yet
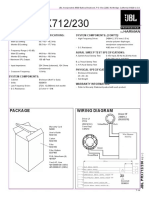
- JBL prx712 prx230Document3 pagesJBL prx712 prx230LasloDonuskayFallAntunovic0% (1)
- Problem 6.24 (A) (B) (C) : SolutionDocument2 pagesProblem 6.24 (A) (B) (C) : Solutionali ahmedNo ratings yet
- Need For Communication Interfaces: Why Are Communication Interfaces Required in Embedded SystemsDocument76 pagesNeed For Communication Interfaces: Why Are Communication Interfaces Required in Embedded SystemsAcharya SuyogNo ratings yet
- Principles of Radio Wave PropagationDocument51 pagesPrinciples of Radio Wave PropagationnaranjitoNo ratings yet
- DFT and FFT Chapter 6Document45 pagesDFT and FFT Chapter 6Egyptian BookstoreNo ratings yet
- FAQ On DVB-T2Document8 pagesFAQ On DVB-T2dan r.No ratings yet
- Machine-Type CommunicationsDocument30 pagesMachine-Type CommunicationsshibinpsNo ratings yet
- System Connector: RM-156 Schematics Nokia Customer CareDocument10 pagesSystem Connector: RM-156 Schematics Nokia Customer Carepronomix100% (1)
- Canopy System User GuideDocument498 pagesCanopy System User GuideSuraj KumarNo ratings yet
- Transmi Finals Set BDocument10 pagesTransmi Finals Set BKerwin TejucoNo ratings yet
- Radio Tech Modifications 3 TABASCANDocument168 pagesRadio Tech Modifications 3 TABASCANfrancovellajunior100% (1)
- 2.1 Overview of Ultra-Wideband (UWB) TechnologyDocument3 pages2.1 Overview of Ultra-Wideband (UWB) Technologychandra1985No ratings yet
- Vigitron Brochure 2017Document28 pagesVigitron Brochure 2017MilaNo ratings yet
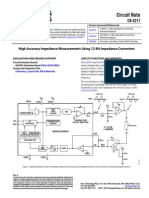
- High Accuracy Impedance Measurements Using 12-Bit Impedance ConvertersDocument6 pagesHigh Accuracy Impedance Measurements Using 12-Bit Impedance Converterschristobal_huntaNo ratings yet
- Amplifier: Classification of Signal AmplifierDocument3 pagesAmplifier: Classification of Signal AmplifierNeethu BhaskaranNo ratings yet
- RV4PX310RDocument4 pagesRV4PX310RNurudin AhmadNo ratings yet
- Pulse Code ModulationDocument9 pagesPulse Code ModulationDebjyotiNo ratings yet
- Four Steps To Understanding Pwms Spectrum RequDocument7 pagesFour Steps To Understanding Pwms Spectrum Requroberto marquezNo ratings yet
- Contoh WimaxDocument7 pagesContoh WimaxIndra PanggaloNo ratings yet
- One Step Majority DecoderDocument18 pagesOne Step Majority DecoderAkshay Doshi100% (1)
- BTS and Antenna Connection PDFDocument19 pagesBTS and Antenna Connection PDFsurma12No ratings yet
- Airmux-200: Broadband Wireless MultiplexerDocument8 pagesAirmux-200: Broadband Wireless MultiplexerAbu FadilahNo ratings yet
- Nokia 3G AlarmDocument4 pagesNokia 3G AlarmDebasisMohapatraNo ratings yet
- Digital Signal Processing (0a)Document24 pagesDigital Signal Processing (0a)melkiNo ratings yet
- Campground Wifi Planning Guide PDFDocument8 pagesCampground Wifi Planning Guide PDFkirollos hossam100% (1)
- FPPCDocument7 pagesFPPCRahul GuptaNo ratings yet
- DSP CEP Part3&4Document7 pagesDSP CEP Part3&4Huzaifa YasirNo ratings yet
- Inmotion M812Document12 pagesInmotion M812Luis GilNo ratings yet
- 3BHS012049 E02 - REV - UF D128A Datasheet ABBDocument2 pages3BHS012049 E02 - REV - UF D128A Datasheet ABBsabah nooriNo ratings yet
- RVV-65A-R3: Electrical SpecificationsDocument5 pagesRVV-65A-R3: Electrical SpecificationsDavid Montero LeivaNo ratings yet