Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- AKAI M-8 Restoration ProcedureDocument5 pagesAKAI M-8 Restoration Proceduresnackdown100% (1)
- GM Passlock II SystemDocument14 pagesGM Passlock II Systemalmia tronicsNo ratings yet
- GratingsDocument371 pagesGratingskris_kcpNo ratings yet
- 6-Stage Cascade ImpactorDocument10 pages6-Stage Cascade ImpactornimaaandmNo ratings yet
- Research ReportDocument81 pagesResearch ReportSuraj DubeyNo ratings yet
- HDFS File System Shell GuideDocument10 pagesHDFS File System Shell GuideM Iftakhul AnwarNo ratings yet
- Series Wta Asme Hydro-Pneumatic TanksDocument4 pagesSeries Wta Asme Hydro-Pneumatic TankscaballerolangNo ratings yet
- Manage Your Risk With ThreatModeler OWASPDocument39 pagesManage Your Risk With ThreatModeler OWASPIvan Dario Sanchez Moreno100% (1)
- RIEDEL GEK Anleitung 02 2010 English PDFDocument35 pagesRIEDEL GEK Anleitung 02 2010 English PDFMuchamad SamsudinNo ratings yet
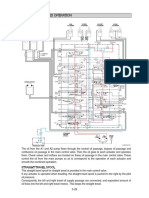
- Group 5 Combined Operation: 1. OutlineDocument9 pagesGroup 5 Combined Operation: 1. OutlineالمهندسوليدالطويلNo ratings yet
- Terminating SSL On SAP Web DispatcherDocument15 pagesTerminating SSL On SAP Web DispatcherMaria Joseph VimalNo ratings yet
- Additives: Smoke Flavorings: Dietrich MeierDocument20 pagesAdditives: Smoke Flavorings: Dietrich MeierLegolassCantikNo ratings yet
- Vistapro User Guide: 6.0Document40 pagesVistapro User Guide: 6.0Pedro QuintalNo ratings yet
- Liquid Cargo HandlingDocument4 pagesLiquid Cargo HandlingMartin ZagarNo ratings yet
- Boiler Shutdown ActivitiesDocument13 pagesBoiler Shutdown ActivitiesMohammad salmanNo ratings yet
- Maximizing The Use of OHP and ChalkboardDocument15 pagesMaximizing The Use of OHP and ChalkboardHaidi Pangilinan-ZamoraNo ratings yet
- Christian E. Williams: VF Industries Everett Shipping DC Warehouse Everett, WADocument3 pagesChristian E. Williams: VF Industries Everett Shipping DC Warehouse Everett, WAapi-414459363No ratings yet
- Washer ExtractorsDocument38 pagesWasher ExtractorsBentura Ventura0% (1)
- 560 200 Pi T 006 - 2Document1 page560 200 Pi T 006 - 2discotopNo ratings yet
- Questionnaire For Evaluation of Ball Mills.: ContentsDocument16 pagesQuestionnaire For Evaluation of Ball Mills.: ContentsThaigroup CementNo ratings yet
- GMSH ManualDocument270 pagesGMSH ManualvttrlcNo ratings yet
- Instruction Manual For DODGE Para-Flex High Speed and Flywheel CouplingsDocument2 pagesInstruction Manual For DODGE Para-Flex High Speed and Flywheel CouplingsJonNo ratings yet
- Instruction Book Manuel D Instructions Manual de InstruccionesDocument26 pagesInstruction Book Manuel D Instructions Manual de InstruccionesDiego AguirreNo ratings yet
- Timber Floors - SpansDocument4 pagesTimber Floors - SpansJohan Vd Merwe SnrNo ratings yet
- Ropaque HP-1096Document6 pagesRopaque HP-1096Manuel XhireNo ratings yet
- OptraSculpt Pad PDFDocument2 pagesOptraSculpt Pad PDFSharmaine JucoNo ratings yet
- AME OIE WhitepaperDocument34 pagesAME OIE Whitepaperanishajohins100% (2)
- Flyer IbaPADU-8-O v1.5 en A4Document2 pagesFlyer IbaPADU-8-O v1.5 en A4yustinusNo ratings yet
- Series: Wheel LoadersDocument12 pagesSeries: Wheel LoadersHandoko Dwi raharjoNo ratings yet