Professional Documents
Culture Documents
Rsi r20 en
Rsi r20 en
Uploaded by
rorro_mrOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Rsi r20 en
Rsi r20 en
Uploaded by
rorro_mrCopyright:
Available Formats
RSI_Rel. 2.0 10.02.
01 en
1 of 46
SOFTWARE
KR C...
Robot Sensor Interface (RSI)
Release 2.0
2 of 46
RSI_Rel. 2.0 10.02.01 en
e Copyright KUKA Roboter GmbH
This documentation or excerpts therefrommay not be reproduced or disclosed to third parties without the express permission of the publishers.
Other functions not described in this documentation may be operable in the controller. The user has no claim to these functions, however, in
the case of a replacement or service work.
We have checked the content of this documentation for conformity with the hardware and software described. Nevertheless, discrepancies
cannot be precluded, for which reason we are not able to guarantee total conformity. The information in this documentation is checked on a
regular basis, however, and necessary corrections will be incorporated in subsequent editions.
Subject to technical alterations without an effect on the function.
PD Interleaf
3 of 46
RSI_Rel. 2.0 10.02.01 en
Contents
1 Characteristics, program installation 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Characteristics 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Installation / uninstallation / update 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Program description 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Structure of the RSI program 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Method of operation of RSI 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 RSI objects 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Object components 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1.1 Structure 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.1.2 RSI units 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.2 Creating objects 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.3 Linking objects 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.4 Containers 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.5 Changing object parameters 13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.6 Debugging 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.6.1 Log file 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3.6.2 Error messages 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Structure of a sensor application 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 Program example 18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 RSI commands 21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Structure of command descriptions 21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 General commands 22 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.3 Link commands 25 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4 Motion commands 26 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5 RSI objects 28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.1 Data objects 28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.2 Signal processing objects 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.2.1 Transformations 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.2.2 Logical operations 38 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.2.3 Comparison operations 40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.2.4 Control objects 41 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.2.5 Additional signal processing objects 44 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5.2.6 Action objects 44 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.6 Other objects 46 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Robot Sensor Interface (RSI)
4 of 46
RSI_Rel. 2.0 10.02.01 en
1 Characteristics, program installation
5 of 46
RSI_Rel. 2.0 10.02.01 en
1 Characteristics, program installation
The Robot Sensor Interface (RSI) makes it possible to create sensor applications in the
programming language KRL (KUKA Robot Language). It contains a library of standard
functions for sensor applications, such as filters, transformations, control functions, etc.
RSI is object--oriented, modularly structured, and provides a special set of commands for
standard applications.
The program Robot Sensor Interface (RSI) can be used with the following software:
KR C1 Release 4.0 and 4.1, or
KR C2 Release 4.0, 4.1 and 5.1.
1.1 Characteristics
The Robot Sensor Interface (RSI) is an open systemwith maximumflexibility. This program
makes it possibletointegrateany sensor intotheKUKArobot controller, andits flexibleobject
linking means that it can be adapted or expanded to accommodate practically any type of
new sensor. RSI allows quick, easily--managed development of sensor applications.
RSI is object--oriented. This means that no commands are processed; instead, RSI
commands are used to create objects and change their characteristics. Once the objects
have been created and activated, they are then evaluated continuously in parallel with a
running program.
RSI is modularly structured, and is integrated into KRL. The application itself is implemented
in KRL. New solutions and expansions can be developed from existing components. The
range of functions (commands, supported sensors, etc.) is expandable in the form of
libraries.
RSI provides a set of commands for standard applications, for example functions for velocity
and position control, transformations, comparison operations, etc.
The sensor data are evaluated in parallel with a running program, thus making it possible to
monitor the motion sequences. Program creation is largely independent of the sensor being
usedandis basedontheobject libraries principle. Complex applicationswithmanydifferent
sensors can be implemented by working with a number of different libraries simultaneously.
Object--independent RSI commands make it possible to standardize the development of
various applications.
Robot Sensor Interface (RSI)
6 of 46
RSI_Rel. 2.0 10.02.01 en
1.2 Installation / uninstallation / update
Technology packages are offered exclusively as add--on software modules.
The installation procedure is the same for all technology packages and is described in
separate documentation module.
The installation, uninstallation, reinstallation and update of technology
packages are described in detail in the documentation Installation/Uninstalla-
tion/Update of Tech Packages.
2 Program description
7 of 46
RSI_Rel. 2.0 10.02.01 en
2 Program description
2.1 Structure of the RSI program
RSI provides a uniform interface for various sensor applications. Unlike the usual case,
where the sensor system is connected via external interfaces, here the sensor is integrated
using KRL. The sensor application itself is implemented in KRL.
Solutions based on RSI can be operated in parallel. RSI is modular, i.e. new solutions can
be developed from existing components. Its scope of functions is expandable.
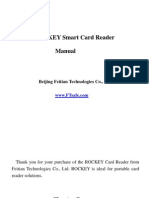
The following diagram shows the structure and integration of RSI schematically.
RSI
KRL
Position
control
Real--time
Not in
real--time
Sensor
driver
Sensor
driver
Object
Lib--
rary
Object
Lib--
rary
I/Os
2.2 Method of operation of RSI
The modularly--structured programRSI operates within the robot controller. RSI provides an
interface to KRL (KUKA Robot Language) by means of which the user, while working on the
KRL level, can access the functions made available by RSI.
Object--independent RSI commands make it possible to standardize the development of
various applications. RSI makes a number of additional internal function interfaces available
internally.
The application itself is implemented in KRL. New solutions and expansions can be
developed on the basis of existing components. The range of functions (commands,
supported sensors, etc.) is expandable in the form of libraries.
RSI is object--oriented. This means that no commands are processed as such; instead, RSI
commands are used to create objects and change their characteristics. Once the objects
have been created and activated, they are then evaluated continuously in parallel with a
running program.
RSI provides a set of commands for standard applications, for example functions for control-
ling velocity and position, transformations, comparison operations, etc.
The sensor data are evaluated in parallel with a running program, thus making it possible to
monitor themotionsequences. Programs canbe createdlargely independently of thesensor
being used, and is based on the object libraries principle. Highly complex applications with
many different sensors can be implemented by working with a number of different libraries
simultaneously.
Robot Sensor Interface (RSI)
8 of 46
RSI_Rel. 2.0 10.02.01 en
2.3 RSI objects
2.3.1 Object components
2.3.1.1 Structure
An RSI object essentially consists of:
G inputs,
G outputs and a
G function
Each individual object may contain only inputs, only outputs, or both inputs and outputs. In
each interpolation cycle (IPO cycle), the function evaluates the states or values present at
the inputs, and makes the results available at the corresponding outputs. It is also possible
to assign parameters which determine the characteristics of the object.
Example: Binary ANDing
&
Input
Input
Output
Function
This example comprises an object with two inputs and one output.
The AND function has the effect that the output is set to logic 1 if both inputs have been
assigned a logic 1. This function is executed in each interpolation cycle.
Object inputs canbe either mandatory or optional. Mandatory inputs must be assigned, while
optional ones may or may not. The characteristics Mandatory and. Optional cannot be
altered subsequently.
Each input and output is assigned a unit, which must correspond to the characteristics of the
object. For example, aninput whichis linkedtoaforcesensor andreceives values innewtons
[N], must not be linked with an ANDobject, because ANDobjects expect to receive Boolean
values at their inputs.
The program checks that the units are correct; if an input is linked with an output whose
unit is incompatible, then an error will occur during the programs run time.
Objects can be created, activated, checked, parameterized, deactivated and deleted.
Creation, linking, activating, deactivating and deleting of objects is carried out by means of
KRL commands. This allows creation of applications within KRL. The execution of created
and activated objects, on the other hand, takes place in parallel with the KRL program, thus
making monitoring and online path correction possible.
2 Program description (continued)
9 of 46
RSI_Rel. 2.0 10.02.01 en
2.3.1.2 RSI units
To make the use of RSI units easier and more user--friendly, a number of predefined units
are available in the program. These units are coded as constants in RSI.
RSI contains a set of predefined constants of commonly--used RSI base units:
;RSI SI Units:
RSIUNIT_No = 0 ;[--]
RSIUNIT_m = H1 ;[m] meters
RSIUNIT_kg = H10 ;[kg] kilograms
RSIUNIT_s = H100 ;[s] seconds
RSIUNIT_A = H1000 ;[A] amperes
RSIUNIT_K = H10000 ;[K] Kelvin
RSIUNIT_cd = H100000 ;[cd] candelas
RSIUNIT_mol = H1000000 ;[mol] moles
;End RSI Units
The units are coded by means of 32--bit variables. Four bits are available for each base unit.
These 4 bits specify the power of the unit; a 0 (zero) indicates that the unit is not present.
This is illustrated in the following diagram:
m kg s A K cd mol not assigned
Meters kilograms seconds amperes Kelvin candelas moles
Material
quantity
Light
intensity
Temper-- Current
intensity
Time Mass Length
MSB
(Most Significant Bit)
LSB
(Least Significant Bit)
ature
The unit meter [m] thus corresponds to 1 or H1, and kilogram [kg] to 16 or H10.
Composite units are formed by combining other units. Of these, the following are
provided:
;RSI composite Units:
RSIUNIT_N = HE11 ;[N] newtons
RSIUNIT_Nm = HE12 ;[Nm] newton--meters
RSIUNIT_V = HFE12 ;[V] volts
RSIUNIT_Pa = HE1F ;[Pa] pascals
;End RSI composite Units
N = kgm/s
2
= H10 + H1 + HE00 = HE11
kg + m + s
2
= N
For example, the composite unit newton [N] is as follows:
In this manner it is possible to code any unit up to a power of +/-- 8.
Robot Sensor Interface (RSI)
10 of 46
RSI_Rel. 2.0 10.02.01 en
2.3.2 Creating objects
Each object is created according to the specific case, but the structure of the commands is
basically identical. The command to create an object looks essentially like this:
Return value = Object name(Handle, ContainerID,
[{ObjHandle, Output}], [{Parameter}])
The following definitions apply here:
Return value The return value indicates whether the object was created
successfully.
If the object was created successfully, then ENUM RSI_OK
is returned; otherwise another one corresponding to
the error will be returned.
Object name Name of the object to be created, for example ST_AND
Handle A variable which is written when the object is created.
The handle is used for subsequent access to the object.
ContainerID Number of the container in which the object is created.
ObjHandle A handle defining the object with which the created object
is linked.
The link is made via the output of the object defined by the parameter
Output.
Output Specifies the output of the object selected using ObjHandle.
The parameters ObjHandle and Output can be used repeatedly
if more than one link is present.
Parameter Additional parameters required for the objects function, for
example the gain factor of a P controller.
Example: ST_AND
An ANDobject is created in container 2 and linked with the objects GREATID1, output 1 and
GREATID2, output 1.
Example AND object
err=ST_AND(ANDID, 2, GREATID1, 1, GREATID2, 1)
An AND object
is created in container 2,
and linked with the objects GREATID1, output 1
and GREATID2, output 1
1
1
1
1
...
...
2
AND
GREATID1
GREATID2
X
X
Output X indicates the number of the output.
Input X indicates the number of the input.
Container 2
2 Program description (continued)
11 of 46
RSI_Rel. 2.0 10.02.01 en
2.3.3 Linking objects
Objects can be linked to one another by linking outputs with inputs. The mandatory links
are part of the KRL command for creating the objects.
To create optional links, the command ST_NEWLINK is available. The command
ST_DELLINK is used to delete these links. In addition, the command ST_CHANGELINK
can be used to redirect a link.
In all three commands, a link is defined from the output of one object to the input of another
object. In order to create, change, or delete a link, the following conditions must be met:
G the object IDs of the objects must be valid; the objects must actually exist;
G the corresponding inputs and outputs must be present;
G the units must be the same;
G the number of links to other objects must not exceed 24 per object.
Each of these conditions is checked by the program. If one of these conditions is not
fulfilled, the robot is stopped and the corresponding error message is generated.
The following diagram shows in schematic form the functions of ST_NEWLINK,
ST_DELLINK and ST_CHANGELINK.
1
1
1
1
2
2
3
3
...
...
OR
(orid)
AND
(andid)
NOT
(notid)
1 1
X
X
Output X indicates the number of the output.
Input X indicates the number of the input.
Link
-- create with ST_NEWLINK
-- delete with ST_DELLINK
Link
-- change with ST_CHANGELINK
Syntax of the command ST_NEWLINK
err=st_newlink(notid, 1, andid, 3)
In this example a link is created from the NOT object NOTID, output 1 to the AND object,
input 3.
Robot Sensor Interface (RSI)
12 of 46
RSI_Rel. 2.0 10.02.01 en
Syntax of the command ST_DELLINK
err=st_dellink(notid, 1, andid, 3)
The link from the NOT object NOTID, output 1 to the AND object, input 3 is deleted.
Syntax of the command ST_CHANGELINK
err=st_changelink(notid, 1, andid, 3, orid, 3)
The link between the NOT object NOTID, output 1 and the ANDobject, input 3 is cancelled
and instead a link is created to the OR object ORID, input 3.
2.3.4 Containers
A container does not provide any function of its own, but is rather used for logical
management of objects. The objects in a single container can be activated, deactivated and
deleted together.
The total number of RSI objects is 100.
The KRL commands for a container are the same as the corresponding commands for
objects:
ST_ENABLE activates the group of objects present in the container;
ST_DISABLE deactivates the group of objects present in the container;
ST_DELOBJ deletes the container and the group of objects present in it.
Using these commands always affects both the container and all of the objects it
contains.
The container makes it possible to edit a group of objects simultaneously. This makes it easy
to switch on and off functions consisting of a group of interlinked objects.
If a container is deactivated or deleted, and an object in the container is linked with another
object outside that container, and if the link is mandatory, then an error will occur during the
programs run time.
When the system is started a container with the ID 0 (zero) is created automatically.
Container 0 is always activated, and the objects it contains are evaluated.
Further containers (1, 2, etc.) are created during run time by means of the command
ST_CONTAINER. These containers (and thus their contents) are initially always
deactivated, and are activated by means of the command ST_ENABLE. The objects
always acquire the status of the container.
Deactivation or deletion of an object causes an error during program run time if the
outputs of the object in question are linked with the inputs of another object.
2 Program description (continued)
13 of 46
RSI_Rel. 2.0 10.02.01 en
2.3.5 Changing object parameters
Object parameters are required for an objects function. They can be but do not have to
be identical to the parameters set when the object is created.
During run time of an object, object parameters can be read using the command
ST_GETPARAM, and written using the command ST_SETPARAM. These two
commands can be used for any object which contains object parameters.
Example
The gain factor of a proportional--action object (P object) will be changed from 0.01745 to
a value of 0.5.
The P controller is created as follows:
err=st_p(propid,1, posid, 2, 0.01745, 0)
(P object ST_P) (gain factor)
In the above example the designation PROPID is the handle of the P object, and the
1 specifies that the first parameter will be altered.
If there is more than one parameter they are numbered sequentially from 1 to n.
Once the P controller has been created, the gain factor (0.01745) can be changed to the
value 0.5 by means of the command
err=ST_Setparam(propid,1,0.5) 0)
Robot Sensor Interface (RSI)
14 of 46
RSI_Rel. 2.0 10.02.01 en
2.3.6 Debugging
2.3.6.1 Log file
RSI keeps a log file as an aid in troubleshooting. This file is named RSIALL.LOG, and is
located in the directory ...\KRC\ROBOTER\LOG.
Thelogfilecontains extensiveinformation, for exampleregardingwhentheindividual objects
were created and what other objects they have been linked to. In addition, all errors which
occur are saved in this file, for example incompatible units when linking objects.
2.3.6.2 Error messages
RSI run time errors caused by incorrect programming are indicated by the error message
Error when Function X was running.
Here X stands for the corresponding error code. The following table provides a list of the
numeric codes and their meanings. For example, code 11 signifies that an error has oc-
curred in the function ST_Container.
For detailed information on errors which may have occurred, please refer to the log file
RSIALL.LOG, which is located in the directory ...\KRC\ROBOTER\LOG.
Table of error messages
Code Error in object/function
2 INT _ST_RESET
3 INT _ST_DELOBJ
4 INT _ST_GETPARAM
5 INT _ST_TESTOBJ
6 INT _ST_TESTMODULE
7 INT _ST_SETPARAM
8 INT _ST_NEWLINK
9 INT _ST_DELLINK
10 INT _ST_CHANGELINK
11 INT _ST_CONTAINER
12 INT _ST_DISABLE
13 INT _ST_ENABLE
16 INT _ST_SN2TTS
17 INT _ST_SN2BASE
18 INT _ST_SN2WORLD
19 INT _ST_AND
20 INT _ST_OR
2 Program description (continued)
15 of 46
RSI_Rel. 2.0 10.02.01 en
Code Error in object/function
21 INT _ST_XOR
22 INT _ST_NOT
23 INT _ST_EQUAL
24 INT _ST_LESS
25 INT _ST_GREATER
32 INT _ST_VEL
33 INT _ST_POS
34 INT _ST_P
35 INT _ST_PD
36 INT _ST_I
37 INT _ST_PID
38 INT _ST_SUM
39 INT _ST_AVERAGE
40 INT _ST_FIR
41 INT _ST_STOP
42 INT _ST_MAP2VAR
43 INT _ST_SETOUT
44 INT _ST_RESETOUT
45 INT _ST_MAP2OUT
47 INT _ST_SN2TOOL
48 INT _ST_ACTPOS
49 INT _ST_PATHCORR
50 INT _ST_DIGIN
51 INT _ST_ANAIN
52 INT _ST_GENTRANS
53 INT _ST_ACTAXIS
54 INT _ST_AXIS_CORR
55 INT _ST_PT1
56 INT _ST_PT2
Robot Sensor Interface (RSI)
16 of 46
RSI_Rel. 2.0 10.02.01 en
2.4 Structure of a sensor application
An application is defined by the dataflowbetweenits objects. Each object provides aspecific
function. Within each function, the data at the objects inputs are read, processed in the
object itself, and the results are made available at the objects outputs.
Functions can be combined in almost any manner desired by linking the corresponding
inputs and outputs. The following diagramprovides an illustration of functions and data flow.
Sensor
Transformation
Path correction
Comparison 1
Comparison 2
Stop
Stop
Container 1
Container 2
Container 0
This example shows an application which uses sensors to monitor the motion of the robot
and makes the appropriate path corrections. Monitoring of the sensor data takes place at the
same time. The function of the object executing path correction controls the position of the
robot by evaluating the sensor data present at the objects inputs.
In the example shown, the data received from the sensor are transformed by a
transformation object and passed on to the path correction object. Since the data flow
between the three objects is evaluated parallel to the running KRL program in each
interpolation cycle, the data received from the sensor can be used to correct the path
immediately.
Applications can be structured more clearly through the creation of Containers. Containers
have no functions of their own, but serve rather to bring objects together into groups. In
addition, containers can be used to activate or deactivate groups of objects.
Two containers are defined in our example (containers 1 and 2), each of which contains one
comparison object (Comparison 1 and Comparison 2) and one stop object. These can be
used to check the size of the value received from the sensor, for example. If the value
received from the sensor exceeds a specified value, then the robot is stopped.
If within a single application a number of comparisons using different monitoring values are
required, for example depending on the position of the robot or other specific circumstances,
containers can be created to allow simple switching between the threshold values which
must be used in each case. This is done by activating or deactivating the appropriate
containers.
This method can be used to group all the objects required for path correction, as well as any
additional containers, in a single container (Container 0 in the example shown); it is thus
possible to switch the path correction function on or off at any time.
2 Program description (continued)
17 of 46
RSI_Rel. 2.0 10.02.01 en
Creation, linking, activating, deactivating and deleting of objects is carried out by means of
KRL commands. This allows creation of applications within KRL. The execution of created
and activated objects, on the other hand, takes place in parallel with the KRL program, thus
making monitoring and online path correction possible.
Robot Sensor Interface (RSI)
18 of 46
RSI_Rel. 2.0 10.02.01 en
2.5 Program example
Traversing the robot with the aid of a force--moment sensor
The robot moves along a programmed path which will be corrected by means of a force--
moment sensor. The data from the force--moment sensor are evaluated and the calculated
correction values trigger the appropriate path correction. The correction values are
superposed on the programmed values.
Originally programmed
Path after sensor correction
Z
Y
X
1
2
path
A force acts on the sensor between 1 and 2. This force triggers the appropriate path
correction, thus shifting the path. This shift remains even after the force ceases to act on the
sensor, i.e. after the correction, because the sensor values have been integrated.
The program for this example is structured as follows:
;------ Variable declarations ------
decl RSIERR err
int dlrid, pid[3], skalid[6], skalkrft
...
;------ Programming of the sensor task ------
;------ Define sensor ------
err=ST_DLRSENS(dlrid,0)
;------ Define object for Cartesian position correction ------
err=ST_PATHCORR (skalkrft,0)
;------ Define integrators to allow large distances to be covered
;------ One integrator with one force value is linked each direction (X, Y and Z)
;------ of the sensor
err=ST_I (skalid[1],0,dlrid,1,0.0001,0)
err=ST_I (skalid[2],0,dlrid,2,0.0001,0)
err=ST_I (skalid[3],0,dlrid,3,0.0001,0)
;------ Adjust units over P adapter
err=ST_P (pid[1],0,skalid[1],1,1,1)
err=ST_P (pid[2],0,skalid[2],1,1,1)
err=ST_P (pid[3],0,skalid[3],1,1,1)
;------ Link the position correction object with the P adapters
err=ST_NEWLINK (pid[1],1,skalkrft,1)
err=ST_NEWLINK (pid[2],1,skalkrft,2)
err=ST_NEWLINK (pid[3],1,skalkrft,3)
; Switch on the RSI
err=ST_ON()
2 Program description (continued)
19 of 46
RSI_Rel. 2.0 10.02.01 en
;------ Robot motion program ------
...
;------ The corrections made by the sensor are superposed on the motions
LOOP
LIN_REL {x 100}
LIN_REL {y 100}
LIN_REL {x -100}
LIN_REL {y -100}
ENDLOOP
...
Graphic representation of objects created
1(Fx) 1 X
2(Fy) 2 Y
3(Fz) 3 Z
4(Mx) 4 A
5(My) 5 B
6(Mz) 6 C
Force--
moment
sensor
(DLRID)
Position
correction
(SKALKRFT)
I controller
SKALID[1]
I controller
SKALID[2]
I controller
SKALID[3]
1
1
1
1
1
1
X
X
Output X indicates the number of the output.
Input X indicates the number of the input.
Description of the program
ST_DLRSENS(dlrid,0)
G St_DLRSENS creates a sensor object which is used to access the force--motion
sensor.
G The handle dlrid is a variable defined by RSI. This makes it possible to access the
object later in the program.
G 0 (zero) signifies that the sensor object is created in Container 0 (zero).
ST_PATHCORR (skalkrft,0)
G ST_PATHCORR is an object used for Cartesian correction of the robot position.
Position correction allows path correction while robot motions are being executed.
G The handle skalkrft allows subsequent access to the position correction object.
G 0 (zero) signifies that the correction object is created in Container 0 (zero).
Robot Sensor Interface (RSI)
20 of 46
RSI_Rel. 2.0 10.02.01 en
ST_I (skalid[1...3],0,dlrid,1...3,0.0001,0)
G ST_I is an integrator. Three integrators are defined for the purpose of integrating the
force values in X, Y and Z.
G The handles of these integrators are saved in the variables skalid[1...3].
G The integrators are created in Container 0.
G The handle dlrid with the output number (1...3) creates the link between the sensor
object and the integrator. This link gives the integrator access to the corresponding
force values.
G The value 0.0001 in this example is the gain factor for the integrator.
G Thefinal 0 (zero) signifies that theforce values are superposedcontinuously (for more
information on this topic, please refer to the description of RSI command ST_I in
Section 3.5.2.4 of this documentation).
ST_NEWLINK (skalid[1...3],1,skalkrft,1...3)
ST_NEWLINK is used to create a link from an integrator (1...3) to an input of the position
correction object.
In this example, the handles skalid[1],1,skalkrft,1 have the following meaning:
A link is created from output 1 of the object skalid[1] to input 1 of the object skalkrft.
The position correction object can thus access the superposed force values and make the
corresponding corrections to the robot position.
At this point the RSI objects have been created and linked to each other, but they are still
not active, and therefore have no effect within the robot controller.
Activation is carried out using the command:
ST_ON()
The command ST_ON initiates RSI program execution. From this point onwards the RSI
objects are evaluated in each interpolation cycle.
3 RSI commands
21 of 46
RSI_Rel. 2.0 10.02.01 en
3 RSI commands
This section contains a description of the RSI commands supplied with
the program on delivery (standard version).
3.1 Structure of command descriptions
The tables on the following pages are structured as follows:
ST_... Name of the RSI command. RSI commands always begin with ST_.
Description Name of the RSI command, its function and any instructions which must
be observed.
Parameters Parameters are used to create RSI objects.
Example:
IN (INT): ID1 Object ID of the object which is linked with the
input.
IN (INT): CHANNEL1 Index of OBJ1
ID1 and CHANNEL1 indicate the output of the object
which is linked with the input.
Object inputs Inputs of the object during run time.
Example:
1 (INT): Value
Object outputs Outputs of the object which are available during run time. These outputs are
available for use by other objects.
Example:
1 (REAL): X position in Base [mm]
Object
parameters
Parameters which can be altered during program run time. These are used with
the commands ST_SETPARAM and ST_GETPARAM.
Object Enums Expansion of the individual parameters.
Return value Value returned when the object is created.
Example:
RSIOK: Successful
The RSI object was saved successfully.
P
Object parameters
Object input
Object output
Example: The command ST_P
The corresponding command is as follows:
ST_P (object ID[handle], container ID, input object ID, index of the input object ID, control
parameters, unit)
Robot Sensor Interface (RSI)
22 of 46
RSI_Rel. 2.0 10.02.01 en
3.2 General commands
General RSI commands are described in this section. Further information on this topic can
be found in Section 2.
ST_ON
Description Initiates RSI program execution. Once RSI has been started, all RSI objects are
executed in the specified sequence in each sensor cycle.
Parameters None
Return value RSIOK: Successful
ST_OFF
Description Terminates RSI program execution.
Parameters None
Return value RSIOK: Successful
ST_RESET
Description Deletes all RSI objects.
Parameters None
Return value RSIOK: Successful
ST_TESTMODULE
Description Checks whether the module specified by MODULENAME has been loaded.
Parameters IN (CHAR[]): MODULENAME File name of the module
Return value TRUE: Module loaded.
FALSE: Module not loaded.
ST_TESTRSI
Description Checks whether the RSI basic module has been loaded. If this is not the case,
the corresponding message will be displayed.
Parameters IN (BOOL): QUITMSG Flag for message display.
TRUE: Message is displayed;
FALSE: Message is not displayed;
Return value TRUE: RSI module loaded.
FALSE: RSI module not loaded.
3 RSI commands (continued)
23 of 46
RSI_Rel. 2.0 10.02.01 en
ST_SETPARAM
Description Sets the parameter of an object. The parameter is specified by the parameter ID.
Parameters IN (INT): OBJID Object ID
IN (INT): PARAMID Parameter ID
IN (REAL): PARAM Value to be set.
Return value RSIOK: Successful
RSIINVOBJID: Invalid object ID.
RSIINVPARAMID: Invalid parameter ID.
RSIINVPARAM: Invalid parameter setting.
ST_GETPARAM
Description Polls a parameter of an object.
Parameters OUT (REAL): PARAM Supplies the parameter polled.
IN (INT): OBJID Object ID of the poll.
IN (INT): PARAMID Parameter ID of the poll.
Return value RSIOK: Successful
RSIINVOBJID: Invalid object ID.
RSIINPARAMID: Invalid parameter ID.
ST_TESTOBJ
Description Checks whether an object with the corresponding ID is present.
Parameters OUT (BOOL): EXIST Flag of the existing object.
IN (INT): OBJID Object ID of the query.
Return value RSIOK: Successful
RSIINVOBJID: Invalid object ID.
ST_ENABLE
Description Activates an RSI object.
Activated RSI objects are executed after ST_ON is called in KRL.
Parameters IN (INT): OBJID Object ID of the RSI object to be activated.
Return value RSIOK: Successful
ST_DISABLE
Description Deactivates an RSI object.
Deactivated RSI objects are not executed in the sensor cycle.
Deactivation is only permissible if the object has no active following object.
Parameters IN (INT): OBJID Object ID of the RSI object to be deactivated.
Return value RSIOK: Successful
RSIINVOBJID: Invalid object ID.
Robot Sensor Interface (RSI)
24 of 46
RSI_Rel. 2.0 10.02.01 en
ST_DELOBJ
Description Deletes an RSI object.
An RSI object may only be deleted if it has no active following object.
Parameters IN (INT): OBJID Object ID of the RSI object to be deleted.
Return value RSIOK: Successful
RSIINVOBJID: Invalid object ID.
RSIHASSUCC: Deletion prevented by following object.
3 RSI commands (continued)
25 of 46
RSI_Rel. 2.0 10.02.01 en
3.3 Link commands
Link commands are used to link objects. Links can be created (ST_NEWLINK), deleted
(ST_DELLINK) and changed (ST_CHANGELINK). Further information on this topic can be
found in Section 2.3.3.
ST_NEWLINK
Description Links the output of an RSI object with the input of a different RSI object and
updates the instructions.
Parameters IN (INT): OBJFROM Object ID of the output RSI object.
IN (INT): CHFROM Index of the output.
IN (INT): OBJTO Object ID of the input RSI object.
IN (INT): CHTO Index of the input.
Return value RSIOK: Successful
RSILNKOUTOBJ: Invalid output object.
RSILNKINOBJ: Invalid input object.
RSILNKOUTID: Invalid output object ID.
RSILNKINID: Invalid input object ID.
RSILNKSIGNAL: Input and output signals incompatible.
ST_DELLINK
Description Deletes the link between the output of an RSI object and the input of a different
RSI object and updates the instructions.
Parameters IN (INT): OBJFROM Object ID of the output RSI object.
IN (INT): CHFROM Index of the output.
IN (INT): OBJTO Object ID of the input RSI object.
IN (INT): CHTO Index of the input.
Return value RSIOK: Successful
RSIBAD: Internal error.
RSIINVINPID: Invalid input object ID.
RSIINVOUTID: Invalid output object ID.
RSIINVINPIND: Invalid input object index.
RSIINVOUTIND: Invalid output object index.
RSIINVLNK: Invalid link.
ST_CHANGELINK
Description Changes the output connection of an existing link and updates the instructions.
Parameters IN (INT): OUTOBJID Object ID of the output object of the link to be changed.
IN (INT): OUTCHID Index of the output to be changed.
IN (INT): INOBJID Object ID of the link input (unchanged).
IN (INT): INCHID Index of the input (unchanged).
IN (INT): NEWOUTOBJID New object ID of the output.
IN (INT): NEWOUTCHID New index of the output.
Return value RSIOK: Successful
Robot Sensor Interface (RSI)
26 of 46
RSI_Rel. 2.0 10.02.01 en
3.4 Motion commands
All of the motion commands described below are used to initiate motions which can be can-
celled while the motion is being executed.
Such a cancellation is not, however, part of the motion command in question, but must rather
be programmed separately by setting a special output using the variable RSI_BREAK,
which is defined in the file $CONFIG.DAT.
Never enter the number of the output here; instead always use the variable
RSI_BREAK. This way you can simply change the number of the output being used,
without having to change the program.
In place of the predefined output, you can also use a different variable. To do this, make
the appropriate changes to the signal RSIBREAK in the file RSILIB.DAT (in directory
...\KRC\ROBOTER\KRC\R1\TP\RSI).
;Break a motion with signal
;
SIGNAL RSIBREAK $OUT[8]
Example
Cancellation of a LIN motion.
err=ST_DLRSENS(dlrid,0)
err=ST_LESS (compid[1],0,dlrid,3,0,0,-10,1)
err=ST_GREATER (compid[2],0,dlrid,3,0,0,10,1)
err=ST_OR (orid,0,compid[1],1,compid[2],1)
err=ST_SETDIGOUT (outid,0,orid,1,RSI_BREAK)
err=ST_ON()
;--- LIN motion which is to be cancelled ---
ST_SKIPLIN (P1)
ST_SKIPPTP
Description Executes a PTP motion to a specified point. This PTP motion can be cancelled
by means of a BREAK signal. In this case, a subsequent motion command will
cause the path to continue towards the destination point of that command.
No reverse motion is executed to the start point of the PTP motion which was
cancelled by the BREAK signal.
Parameters IN (E6POS): E6P Destination point of the PTP motion.
Return value None
ST_RETPTP
Description Executes a PTP motion to a specified point. This PTP motion can be cancelled
by means of a BREAK signal. In this case, reverse motion is executed to the
start point of the PTP motion.
Parameters IN (E6POS): E6P Destination point of the PTP motion.
Return value None
3 RSI commands (continued)
27 of 46
RSI_Rel. 2.0 10.02.01 en
ST_SKIPLIN
Description Executes a LIN motion to a specified point. This LIN motion can be cancelled by
means of a BREAK signal. In this case, a subsequent motion command will
cause the path to continue.
No reverse motion is executed to the start point of the LIN motion which was
cancelled by the BREAK signal.
Parameters IN (E6POS): E6P Destination point of the LIN motion.
Return value None
ST_RETLIN
Description Executes a LIN motion to a specified point. This LIN motion can be cancelled by
means of a BREAK signal. In this case, reverse motion is executed to the start
point of the LIN motion.
Parameters IN (E6POS): E6P Destination point of the LIN motion.
Return value None
ST_SKIPCIRC
Description Executes a CIRC motion to a specified point. This CIRC motion can be cancelled
by means of a BREAK signal. In this case, a subsequent motion command will
cause the path to continue.
No reverse motion is executed to the start point of the CIRC motion which was
cancelled by the BREAK signal.
Parameters IN (E6POS): E6P Intermediate point of the CIRC motion.
IN (E6POS): E6P Destination point of the CIRC motion.
Return value None
ST_RETCIRC
Description Executes a CIRC motion to a specified point. This CIRC motion can be cancelled
by means of a BREAK signal. In this case, reverse motion is executed to the
start point of the CIRC motion.
Parameters IN (E6POS): E6P Intermediate point of the CIRC motion.
IN (E6POS): E6P Destination point of the CIRC motion.
Return value None
Robot Sensor Interface (RSI)
28 of 46
RSI_Rel. 2.0 10.02.01 en
3.5 RSI objects
3.5.1 Data objects
ST_DIGIN
Description Creates an RSI object which accesses digital inputs.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): INDEX See object parameter index.
IN (INT): LENGTH Quantity of bits to be read (0: bit, 1: byte, 2: word)
IN (INT): UNIT Unit of the input (no unit is required for
bit input).
Object outputs 1 (INT): Digital input at the selected index.
Object
parameters
0 (INT): Index Value in length units of a digital input
(1--1026 for bit, 1--204 for byte, 1--40 for word).
Return value RSIOK: Successful;
RSIINVCONT: Invalid container;
RSIINVPARAM:Invalid object parameter index.
ST_ANAIN
Description Creates an RSI object which accesses analog inputs.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): INDEX See object parameter index.
Object outputs 1 (REAL): Analog input at the selected index.
Object
parameters
0 (INT): Index Index of the analog input (1--8)
Return value RSIOK: Successful;
RSIINVCONT: Invalid container;
RSIINVPARAM:Invalid object parameter index.
The appropriate drivers for the analog inputs must be installed. Otherwise this
command will cause an error during run time.
3 RSI commands (continued)
29 of 46
RSI_Rel. 2.0 10.02.01 en
ST_ACTPOS
Description Creates an RSI object which supplies the current position of the robot
in the Cartesian coordinate system.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): COSYS Current position in the Base coordinate system.
Object outputs 1 (REAL): X Position of coordinate axis X [mm]
2 (REAL): Y Position of coordinate axis Y [mm]
3 (REAL): Z Position of coordinate axis Z [mm]
4 (REAL): A Rotation about the Z axis [rad]
5 (REAL): B Rotation about the Y axis [rad]
6 (REAL): C Rotation about the X axis [rad]
Return value RSIOK: Successful;
RSIINVCONT: Invalid container.
ST_ACTAXIS
Description Creates an RSI object which delivers the current position of the robot
in the axis--specific coordinate system.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
Object outputs 1 (REAL): A1 Rotation about axis 1 [rad]
2 (REAL): A2 Rotation about axis 2 [rad]
3 (REAL): A3 Rotation about axis 3 [rad]
4 (REAL): A4 Rotation about axis 4 [rad]
5 (REAL): A5 Rotation about axis 5 [rad]
6 (REAL): A6 Rotation about axis 6 [rad]
Return value RSIOK: Successful;
RSIINVCONT: Invalid container.
Robot Sensor Interface (RSI)
30 of 46
RSI_Rel. 2.0 10.02.01 en
ST_MAP2SEN_PINT
Description Creates an RSI object which maps its input onto the variable $SEN_PINT[...].
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of OBJ1 which is linked with the input.
IN (INT): VARID Index (see object parameters).
Object inputs 1 (BOOL): Input condition
Object
parameters
0 (INT): Index Index of the variable $SEN_PINT
(valid range: 1 ... 20).
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSICONTOVERFLOW: Container overflow.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKPARAM: Invalid object parameter.
ST_MAP2SEN_PREA
Description Creates an RSI object which maps its input onto the variable $SEN_PREA[...].
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of OBJ1 which is linked with the input.
IN (INT): VARID Index (see object parameters).
Object inputs 1 (REAL): Value to be mapped
Object
parameters
0 (INT): Index Index of the variable $SEN_PREA
(valid range: 1 ... 20).
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSICONTOVERFLOW: Container overflow.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKPARAM: Invalid object parameter.
3 RSI commands (continued)
31 of 46
RSI_Rel. 2.0 10.02.01 en
ST_MAP2DIGOUT
Description Creates an RSI object which maps its input onto a digital output.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of OBJ1 which is linked with the input.
IN (INT): OUTID Index (see object parameters).
IN (INT): LENGTH Length (see object parameters).
Object inputs 1 (INT): Value for the output.
Object
parameters
0 (INT): Index Index of the digital output to be mapped
(valid range: 1 ... 4096).
1 (INT): Bit length (0: bit, 1: byte, 2: word)
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSICONTOVERFLOW: Container overflow.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKPARAM: Invalid object parameter (see log file).
ST_MAP2ANAOUT
Description Creates an RSI object which maps its input onto an analog output.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of OBJ1 which is linked with the input.
IN (INT): OUTID Index (see object parameters).
Object inputs 1 (INT): Value for the output.
Object
parameters
0 (INT): Index Index of the analog output to be mapped
(valid range: 1 ... 8).
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSICONTOVERFLOW: Container overflow.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKPARAM: Invalid object parameter (see log file).
Robot Sensor Interface (RSI)
32 of 46
RSI_Rel. 2.0 10.02.01 en
3.5.2 Signal processing objects
3.5.2.1 Transformations
ST_GENTRANS
Description Creates an RSI object which carries out a general translational and rotational
transformation in accordance with the specified object parameters. An additional
object parameter defines the calculation type of the transformation.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container, in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object linked with the 1st input.
IN (INT): CHANNEL1 Output index of ID1 which is linked with the 1st input.
IN (INT): ID2 Object ID of the object linked with the 2nd input.
IN (INT): CHANNEL2 Output index of ID2 which is linked with the 2nd input.
IN (INT): ID3 Object ID of the object linked with the 3rd input.
IN (INT): CHANNEL3 Output index of ID3 which is linked with the 3rd input.
IN (INT): ID4 Object ID of the object linked with the 4th input.
IN (INT): CHANNEL4 Output index of ID4 which is linked with the 4th input.
IN (INT): ID5 Object ID of the object linked with the 5th input.
IN (INT): CHANNEL5 Output index of ID5 which is linked with the 5th input.
IN (INT): ID6 Object ID of the object linked with the 6th input.
IN (INT): CHANNEL6 Output index of ID6 which is linked with the 6th input.
IN (INT): CALCTYPE Calculation type (see object Enums).
Object inputs 1 (REAL): X value for transformation.
2 (REAL): Y value for transformation.
3 (REAL): Z value for transformation.
4 (REAL): Dependent on the calculation type.
5 (REAL): Dependent on the calculation type.
6 (REAL): Dependent on the calculation type.
Object outputs 1 (REAL): Transformed X value.
2 (REAL): Transformed Y value.
3 (REAL): Transformed Z value.
4 (REAL): Dependent on the calculation type.
5 (REAL): Dependent on the calculation type.
6 (REAL): Dependent on the calculation type.
Object
parameters
0 (REAL): TransX Translation in the X direction.
1 (REAL): TransY Translation in the Y direction.
2 (REAL): TransZ Translation in the Z direction.
3 (REAL): RotZ Rotation about the Z axis.
4 (REAL): RotY Rotation about the Y axis.
5 (REAL): RotX Rotation about the X axis.
6 (INT): CalcType Calculation type (see object Enums).
Object Enums Calculation type Inputs/Outputs
0 : 3 inputs 3 outputs -- Rotation and translation
1 : 3 inputs 3 outputs -- Rotation only
2 : 6 inputs 6 outputs -- Rotation and translation for X,Y,Z,A,B,C input.
3 : 6 inputs 6 outputs -- Rotation only for X,Y,Z,A,B,C input.
4 : 6 inputs 6 outputs Initiates a torque transformation
Fx, Fy, Fz, Mz, My, Mz
3 RSI commands (continued)
33 of 46
RSI_Rel. 2.0 10.02.01 en
Continuation of ST_GENTRANS
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKCYCLE: The link refers the object to itself (see log file).
RSINOLNKOBJ: The object cannot be linked (container).
RSIINVPARAM: Invalid object parameter (CalcType).
ST_SN2TOOL
Description Creates an RSI object for transforming sensor inputs into the
tool coordinate system.
The object parameters define the translation and rotation of the sensor coordi-
nate system relative to the flange coordinate system.
An additional object parameter defines the calculation type of the
transformation.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container, in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object linked with the 1st input.
IN (INT): CHANNEL1 Index of ID1 which is linked with the 1st input.
IN (INT): ID2 Object ID of the object linked with the 2nd input.
IN (INT): CHANNEL2 Index of ID2 which is linked with the 2nd input.
IN (INT): ID3 Object ID of the object linked with the 3rd input.
IN (INT): CHANNEL3 Index of ID3 which is linked with the 3rd input.
IN (INT): ID4 Object ID of the object linked with the 4th input.
IN (INT): CHANNEL4 Index of ID4 which is linked with the 4th input.
IN (INT): ID5 Object ID of the object linked with the 5th input.
IN (INT): CHANNEL5 Index of ID5 which is linked with the 5th input.
IN (INT): ID6 Object ID of the object linked with the 6th input.
IN (INT): CHANNEL6 Index of ID6 which is linked with the 6th input.
IN (INT): CALCTYPE Calculation type (see object Enums).
Object inputs 1 (REAL): X value for transformation.
2 (REAL): Y value for transformation.
3 (REAL): Z value for transformation.
4 (REAL): Dependent on the calculation type.
5 (REAL): Dependent on the calculation type.
6 (REAL): Dependent on the calculation type.
Object outputs 1 (REAL): Transformed X value.
2 (REAL): Transformed Y value.
3 (REAL): Transformed Z value.
4 (REAL): Dependent on the calculation type.
5 (REAL): Dependent on the calculation type.
6 (REAL): Dependent on the calculation type.
Robot Sensor Interface (RSI)
34 of 46
RSI_Rel. 2.0 10.02.01 en
Continuation of ST_SN2TOOL
Object
parameters
0 (REAL): TransX Translation of the X sensor relative to the
flange coordinate system.
1 (REAL): TransY Translation of the Y sensor relative to the
flange coordinate system.
2 (REAL): TransZ Translation of the Z sensor relative to the
flange coordinate system.
3 (REAL): RotZ Rotation about the Z sensor relative to the
flange coordinate system.
4 (REAL): RotY Rotation about the Y sensor relative to the
flange coordinate system.
5 (REAL): RotX Rotation about the X sensor relative to the
flange coordinate system.
6 (INT): CalcType Calculation type (see object Enums).
Object Enums Calculation type
0 : 3 inputs 3 outputs -- Rotation and translation.
1 : 3 inputs 3 outputs -- Rotation only.
2 : 6 inputs 6 outputs -- Rotation and translation for X,Y,Z,A,B,C input.
3 : 6 inputs 6 outputs -- Rotation only for X,Y,Z,A,B,C input.
4 : 6 inputs 6 outputs Initiates a torque transformation
Fx, Fy, Fz, Mz, My, Mz.
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKCYCLE: The link refers the object to itself (see log file).
RSINOLNKOBJ: The object cannot be linked (container).
RSIINVPARAM: Invalid object parameter (CalcType).
3 RSI commands (continued)
35 of 46
RSI_Rel. 2.0 10.02.01 en
ST_SN2BASE
Description Creates an RSI object for transforming sensor inputs into the
Base coordinate system.
The object parameters define the translation and rotation of the sensor
coordinate system relative to the flange coordinate system.
An additional object parameter defines the calculation type of the
transformation.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container, in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object linked with the 1st input.
IN (INT): CHANNEL1 Index of ID1 which is linked with the 1st input.
IN (INT): ID2 Object ID of the object linked with the 2nd input.
IN (INT): CHANNEL2 Index of ID2 which is linked with the 2nd input.
IN (INT): ID3 Object ID of the object linked with the 3rd input.
IN (INT): CHANNEL3 Index of ID3 which is linked with the 3rd input.
IN (INT): ID4 Object ID of the object linked with the 4th input.
IN (INT): CHANNEL4 Index of ID4 which is linked with the 4th input.
IN (INT): ID5 Object ID of the object linked with the 5th input.
IN (INT): CHANNEL5 Index of ID5 which is linked with the 5th input.
IN (INT): ID6 Object ID of the object linked with the 6th input.
IN (INT): CHANNEL6 Index of ID6 which is linked with the 6th input.
IN (INT): CALCTYPE Calculation type (see object Enums).
Object inputs 1 (REAL): X value for transformation.
2 (REAL): Y value for transformation.
3 (REAL): Z value for transformation.
4 (REAL): Dependent on the calculation type.
5 (REAL): Dependent on the calculation type.
6 (REAL): Dependent on the calculation type.
Object outputs 1 (REAL): Transformed X value.
2 (REAL): Transformed Y value.
3 (REAL): Transformed Z value.
4 (REAL): Dependent on the calculation type.
5 (REAL): Dependent on the calculation type.
6 (REAL): Dependent on the calculation type.
Object
parameters
0 (REAL): TransX Translation of the X sensor relative to the
flange coordinate system.
1 (REAL): TransY Translation of the Y sensor relative to the
flange coordinate system.
2 (REAL): TransZ Translation of the Z sensor relative to the
flange coordinate system.
3 (REAL): RotZ Rotation about the Z sensor relative to the
flange coordinate system.
4 (REAL): RotY Rotation about the Y sensor relative to the
flange coordinate system.
5 (REAL): RotX Rotation about the X sensor relative to the
flange coordinate system.
6 (INT): CalcType Calculation type (see object Enums).
Robot Sensor Interface (RSI)
36 of 46
RSI_Rel. 2.0 10.02.01 en
Continuation of ST_SN2BASE
Object Enums Calculation type
0 : 3 inputs 3 outputs -- Rotation and translation.
1 : 3 inputs 3 outputs -- Rotation only.
2 : 6 inputs 6 outputs -- Rotation and translation for X,Y,Z,A,B,C input.
3 : 6 inputs 6 outputs -- Rotation only for X,Y,Z,A,B,C input.
4 : 6 inputs 6 outputs Initiates a torque transformation
Fx, Fy, Fz, Mz, My, Mz.
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKCYCLE: The link refers the object to itself (see log file).
RSINOLNKOBJ: The object cannot be linked (container).
RSIINVPARAM: Invalid object parameter (CalcType).
ST_SN2TTS
Description Creates an RSI object for transforming sensor inputs into the
TTS coordinate system.
The object parameters define the translation and rotation of the sensor coordi-
nate system relative to the flange coordinate system.
An additional object parameter defines the calculation type of the
transformation.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container, in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object linked with the 1st input.
IN (INT): CHANNEL1 Index of ID1 which is linked with the 1st input.
IN (INT): ID2 Object ID of the object linked with the 2nd input.
IN (INT): CHANNEL2 Index of ID2 which is linked with the 2nd input.
IN (INT): ID3 Object ID of the object linked with the 3rd input.
IN (INT): CHANNEL3 Index of ID3 which is linked with the 3rd input.
IN (INT): ID4 Object ID of the object linked with the 4th input.
IN (INT): CHANNEL4 Index of ID4 which is linked with the 4th input.
IN (INT): ID5 Object ID of the object linked with the 5th input.
IN (INT): CHANNEL5 Index of ID5 which is linked with the 5th input.
IN (INT): ID6 Object ID of the object linked with the 6th input.
IN (INT): CHANNEL6 Index of ID6 which is linked with the 6th input.
IN (INT): CALCTYPE Calculation type (see object Enums).
Object inputs 1 (REAL): X value for transformation.
2 (REAL): Y value for transformation.
3 (REAL): Z value for transformation.
4 (REAL): Dependent on the calculation type.
5 (REAL): Dependent on the calculation type.
6 (REAL): Dependent on the calculation type.
3 RSI commands (continued)
37 of 46
RSI_Rel. 2.0 10.02.01 en
Continuation of ST_SN2TTS
Object outputs 1 (REAL): Transformed X value.
2 (REAL): Transformed Y value.
3 (REAL): Transformed Z value.
4 (REAL): Dependent on the calculation type.
5 (REAL): Dependent on the calculation type.
6 (REAL): Dependent on the calculation type.
Object
parameters
0 (REAL): TransX Translation of the X sensor relative to the
flange coordinate system.
1 (REAL): TransY Translation of the Y sensor relative to the
flange coordinate system.
2 (REAL): TransZ Translation of the Z sensor relative to the
flange coordinate system.
3 (REAL): RotZ Rotation about the Z sensor relative to the
flange coordinate system.
4 (REAL): RotY Rotation about the Y sensor relative to the
flange coordinate system.
5 (REAL): RotX Rotation about the X sensor relative to the
flange coordinate system.
6 (INT): CalcType Calculation type (see object Enums).
Object Enums Calculation type
0 : 3 inputs 3 outputs -- Rotation and translation.
1 : 3 inputs 3 outputs -- Rotation only.
2 : 6 inputs 6 outputs -- Rotation and translation for X,Y,Z,A,B,C input.
3 : 6 inputs 6 outputs -- Rotation only for X,Y,Z,A,B,C input.
4 : 6 inputs 6 outputs Initiates a torque transformation
Fx, Fy, Fz, Mz, My, Mz.
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKCYCLE: The link refers the object to itself (see log file).
RSINOLNKOBJ: The object cannot be linked (container).
RSIINVPARAM: Invalid object parameter (CalcType).
Robot Sensor Interface (RSI)
38 of 46
RSI_Rel. 2.0 10.02.01 en
3.5.2.2 Logical operations
ST_AND
Description Creates an RSI object which carries out an AND operation.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): OBJ1 Object ID of the object which is linked with the 1st input.
IN (INT): CH1 Index of OBJ1 which is linked with the 1st input.
IN (INT): OBJ2 Object ID of the object which is linked with the 2nd input.
IN (INT): CH2 Index of OBJ2 which is linked with the 2nd input.
Object inputs 1 (BOOL): 1st input (mandatory)
2 (BOOL): 2nd input (mandatory)
Note: A maximum of 10 inputs are supported.
Object outputs 1 (BOOL): AND Result
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKCYCLE: The link refers the object to itself (see log file).
RSINOLNKOBJ: The object cannot be linked (container).
ST_OR
Description Creates an RSI object which carries out an OR operation.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): OBJ1 Object ID of the object which is linked with the 1st input.
IN (INT): CH1 Index of OBJ1 which is linked with the 1st input.
IN (INT): OBJ2 Object ID of the object which is linked with the 2nd input.
IN (INT): CH2 Index of OBJ2 which is linked with the 2nd input.
Object inputs 1 (BOOL): 1st input (mandatory)
2 (BOOL): 2nd input (mandatory)
Note: A maximum of 10 inputs are supported.
Object outputs 1 (BOOL): OR Result
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKCYCLE: The link refers the object to itself (see log file).
RSINOLNKOBJ: The object cannot be linked (container).
3 RSI commands (continued)
39 of 46
RSI_Rel. 2.0 10.02.01 en
ST_XOR
Description Creates an RSI object which carries out an exclusive OR operation (XOR opera-
tion).
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): OBJ1 Object ID of the object which is linked with the 1st input.
IN (INT): CH1 Index of OBJ1 which is linked with the 1st input.
IN (INT): OBJ2 Object ID of the object which is linked with the 2nd input.
IN (INT): CH2 Index of OBJ2 which is linked with the 2nd input.
Object inputs 1 (BOOL): 1st input (mandatory)
2 (BOOL): 2nd input (mandatory)
Object outputs 1 (BOOL): XOR Result
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKCYCLE: The link refers the object to itself (see log file).
RSINOLNKOBJ: The object cannot be linked (container).
ST_NOT
Description Creates an RSI object which carries out an NOT operation.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): OBJ1 Object ID of the object which is linked with the input.
IN (INT): CH1 Index of OBJ1 which is linked with the input.
Object inputs 1 (BOOL): Input
Object outputs 1 (BOOL): Logical complement of the input.
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKCYCLE: The link refers the object to itself (see log file).
RSINOLNKOBJ: The object cannot be linked (container).
Robot Sensor Interface (RSI)
40 of 46
RSI_Rel. 2.0 10.02.01 en
3.5.2.3 Comparison operations
ST_EQUAL
Description Creates an RSI object which compares its own input and return values.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): OBJ1 Object ID of the object which is linked with the 1st input.
IN (INT): CH1 Index of OBJ1 which is linked with the 1st input.
IN (INT): OBJ2 Object ID of the object which is linked with the 2nd input.
IN (INT): CH2 Index of OBJ2 which is linked with the 2nd input.
IN (REAL): DEFVAL Value for comparison if the 2nd input is not linked.
IN (REAL): Dev Permissible deviation for the comparison.
Object inputs 1 (REAL): Input 1 (mandatory)
2 (REAL): Input 2 (if this link is missing, a default value will be used;
see the parameter DEFVAL).
Object outputs 1 (BOOL): Result of comparison operation.
Return value RSIOK: Successful
ST_LESS
Description Creates an RSI object which compares its own inputs.
The result is TRUE if the value of the 1st input is less than the value of the 2nd
input.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): OBJ1 Object ID of the object which is linked with the 1st input.
IN (INT): CH1 Index of OBJ1 which is linked with the 1st input.
IN (INT): OBJ2 Object ID of the object which is linked with the 2nd input.
IN (INT): CH2 Index of OBJ2 which is linked with the 2nd input.
IN (REAL): DEFVAL Value for comparison if the 2nd input is not linked.
IN (REAL): HIST Hysteresis for the comparison.
Object inputs 1 (REAL): Input 1 (mandatory)
2 (REAL): Input 2 (if this link is missing, a default value will be used;
see the parameter DEFVAL).
Object outputs 1 (BOOL): Result of comparison operation.
Return value RSIOK: Successful
RSIBAD: RSI Internal error.
RSIIINVLNK: Invalid link.
RSIINVCONT: Invalid container.
RSICONTOV: Container overflow.
3 RSI commands (continued)
41 of 46
RSI_Rel. 2.0 10.02.01 en
ST_GREATER
Description Creates an RSI object which compares its own inputs.
The result is TRUE if the value of the 1st input is greater than the value of the
2nd input.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): OBJ1 Object ID of the object which is linked with the 1st input.
IN (INT): CH1 Index of OBJ1 which is linked with the 1st input.
IN (INT): OBJ2 Object ID of the object which is linked with the 2nd input.
IN (INT): CH2 Index of OBJ2 which is linked with the 2nd input.
IN (REAL): DEFVAL Value for comparison if the 2nd input is not linked.
IN (REAL): HIST Hysteresis for the comparison.
Object inputs 1 (REAL): Input 1 (mandatory)
2 (REAL): Input 2 (if this link is missing, a default value will be used;
see the parameter DEFVAL).
Object outputs 1 (BOOL): Result of comparison operation.
Return value RSIOK: Successful
3.5.2.4 Control objects
ST_P
Description Creates an RSI object with a REAL input, a REAL output, and a special parame-
ter for the P controller.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of ID1 which is linked with the input.
IN (REAL): KR KR control parameter.
IN (INT): UNIT Unit for the output.
Object inputs 1 (REAL): Input signal
Object outputs 1 (REAL): Output signal
Robot Sensor Interface (RSI)
42 of 46
RSI_Rel. 2.0 10.02.01 en
ST_PD
Description Creates an RSI object with PD control functionality.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of ID1 which is linked with the input.
IN (REAL): KR KR control parameter.
IN (REAL): TV TV control parameter.
Object inputs 1 (REAL): Input signal
Object outputs 1 (REAL): Output signal
ST_I
Description Creates an RSI object with I control functionality.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of ID1 which is linked with the input.
IN (REAL): TI TI control parameter.
IN (INT): IMODE Integration mode
-- 0 at rest,
-- 1 in motion.
Object inputs 1 (REAL): Input signal
Object outputs 1 (REAL): Output signal
ST_PID
Description Creates an RSI object with PID control functionality.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of ID1 which is linked with the input.
IN (REAL): KR KR control parameter.
IN (REAL): TV TV control parameter.
IN (REAL): TN TN control parameter.
Object inputs 1 (REAL): Input signal
Object outputs 1 (REAL): Output signal
3 RSI commands (continued)
43 of 46
RSI_Rel. 2.0 10.02.01 en
ST_PT1
Description Creates an RSI object with PT1 control functionality.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of ID1 which is linked with the input.
IN (REAL): KP KP control parameter.
IN (REAL): T1 T1 control parameter.
Object inputs 1 (REAL): Input signal
Object outputs 1 (REAL): Output signal
ST_PT2
Description Creates an RSI object with PT2 control functionality.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of ID1 which is linked with the input.
IN (REAL): KP KP control parameter.
IN (REAL): T1 T1 control parameter.
IN (REAL): T2 T2 control parameter.
Object inputs 1 (REAL): Input signal
Object outputs 1 (REAL): Output signal
Robot Sensor Interface (RSI)
44 of 46
RSI_Rel. 2.0 10.02.01 en
3.5.2.5 Additional signal processing objects
ST_SUM
Description Creates an RSI object which sums a number of signal inputs together into a
single output.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): OBJ1 Object ID of the object which is linked with the 1st input.
IN (INT): CH1 Index of OBJ1 which is linked with the 1st input.
IN (INT): OBJ2 Object ID of the object which is linked with the 2nd input.
IN (INT): CH2 Index of OBJ2 which is linked with the 2nd input.
IN (REAL): DEFVAL Value to be added if only the 1st input is present.
Object inputs 1 (REAL): 1st signal value to be added (mandatory)
2 (REAL): 2nd signal value to be added
Note: A maximum of 5 inputs are supported.
Object outputs 1 (REAL): Output signal
Return value RSIOK: Successful
3.5.2.6 Action objects
ST_VEL
Description Sets the program override $OV_PRO to the input value.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of OBJ1 which is linked with the input.
Object inputs 1 (INT): New override (0 -- 100)
Return value RSIOK: Successful
3 RSI commands (continued)
45 of 46
RSI_Rel. 2.0 10.02.01 en
ST_STOP
Description Creates an RSI object which triggers dynamic braking if the state of the
input is TRUE.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of OBJ1 which is linked with the input.
IN (INT): MODE Stop mode (see object Enums).
Object inputs 1 (BOOL): Input condition
Object
parameters
0 (INT): StopMode (see object Enums).
Object Enums StopMode:
0 : No stop message only.
1 : Normal stop.
2 : Velocity stop
3 : Quick stop.
Return value RSIOK: Successful
ST_SETDIGOUT
Description Creates an RSI object which sets the digital output to TRUE as soon as the input
is TRUE.
Note: The output is not reset (as in ST_MAP2DIGOUT) if the input changes
from TRUE to FALSE.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
IN (INT): ID1 Object ID of the object which is linked with the input.
IN (INT): CHANNEL1 Index of OBJ1 which is linked with the input.
IN (INT): OUTID Index (see object parameters).
Object inputs 1 (BOOL): State for the output.
Object
parameters
0 (INT): Index Index of the digital output to be mapped
(valid range: 1 ... 4096).
Return value RSIOK: Successful
RSIINVCONT: Invalid container.
RSICONTOVERFLOW: Container overflow.
RSILNKOUTOBJ: Invalid output object ID (see log file).
RSILNKOUTINDEX: Invalid index in output object (see log file).
RSILNKSIGNAL: Input and output signals incompatible
(see log file).
RSILNKPARAM: Invalid object parameter (see log file).
Robot Sensor Interface (RSI)
46 of 46
RSI_Rel. 2.0 10.02.01 en
ST_PATHCORR
Description Creates an RSI object which allows access to the robot path correction. This
object makes it possible to use ST_NEWLINK to set correction values for the
robot position in each sensor cycle.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
Object inputs 1 (REAL): Correction of X translation in the Base coordinate system.
2 (REAL): Correction of Y translation in the Base coordinate system.
3 (REAL): Correction of Z translation in the Base coordinate system.
4 (REAL): Correction of rotation about Z in the Base coordinate system.
5 (REAL): Correction of rotation about Y in the Base coordinate system.
6 (REAL): Correction of rotation about X in the Base coordinate system.
Return value RSIOK: Successful
ST_AXISCORR
Description Creates an RSI object which allows access to the robot axis correction. This
object makes it possible to use ST_NEWLINK to set correction values for the
robot position in each sensor cycle.
Parameters OUT (INT): OBJID Object ID of the RSI object being created.
IN (INT): AFID Object ID of the container in which the RSI object
being created is located.
Object inputs 1 (REAL): Correction of rotation about A1.
2 (REAL): Correction of rotation about A2.
3 (REAL): Correction of rotation about A3.
4 (REAL): Correction of rotation about A4.
5 (REAL): Correction of rotation about A5.
6 (REAL): Correction of rotation about A6.
Return value RSIOK: Successful
3.6 Other objects
ST_CONTAINER
Description Creates a container object.
Containers hold a number of RSI objects which can be edited together.
Parameters OUT (INT): OBJID Provides the object ID of the container being created.
Return value RSIOK: Successful
1
Index
Index -- i
C
Comparison operations, 40
Containers, 12
Control objects, 41
Creating objects, 10
D
Data objects, 28
Debugging, 14
E
Error messages, 14
G
General commands, 22
I
Installation, 6
L
Library, 7
Link commands, 25
Linking objects, 11
Log file, 14
Logical operations, 38
M
Method of operation of RSI, 7
Motion commands, 26
N
Number of RSI objects, 12
O
Object components, 8
Object ID, 11
Object library, 7
Objects, 8
Optional links, 11
P
Program examples, 18
R
RSI commands, 21
RSI objects, 8, 28
RSI_BREAK, 26
RSILIB.DAT, 26
S
Sensor application, 16
Signal processing objects, 32
ST_ACTAXIS, 29
ST_ACTPOS, 29
ST_ANAIN, 28
ST_AND, 38
ST_AXISCORR, 46
ST_CHANGELINK, 11, 25
ST_CONTAINER, 12, 46
ST_DELLINK, 11, 25
ST_DELOBJ, 12, 24
ST_DIGIN, 28
ST_DISABLE, 12, 23
ST_DLRSENS, 19
ST_ENABLE, 12, 23
ST_EQUAL, 40
ST_GENTRANS, 32
ST_GETPARAM, 13, 23
ST_GREATER, 41
ST_I, 20, 42
ST_LESS, 40
ST_MAP2ANAOUT, 31
ST_MAP2DIGOUT, 31
ST_MAP2SEN_PINT, 30
ST_MAP2SEN_PREA, 30
ST_NEWLINK, 11, 25
ST_NOT, 39
ST_OFF, 22
Index
Index -- ii
ST_ON, 22
ST_OR, 38
ST_P, 13, 41
ST_PATHCORR, 19, 46
ST_PD, 42
ST_PID, 42
ST_PT1, 43
ST_PT2, 43
ST_RESET, 22
ST_RETCIRC, 27
ST_RETLIN, 27
ST_RETPTP, 26
ST_SETDIGOUT, 45
ST_SETPARAM, 13, 23
ST_SKIPCIRC, 27
ST_SKIPLIN, 27
ST_SKIPPTP, 26
ST_SN2BASE, 35
ST_SN2TOOL, 33
ST_SN2TTS, 36
ST_STOP, 45
ST_SUM, 44
ST_TESTMODULE, 22
ST_TESTOBJ, 23
ST_TESTRSI, 22
ST_VEL, 44
ST_XOR, 39
Structure of a sensor application, 16
Structure of the RSI program, 7
T
Transformations, 32
U
Uninstallation, 6
Unit, 8
Update, 6
You might also like
- Sunplus SPHE8107H 8107S SoundBar DEMO Board Design Guide V1.0Document19 pagesSunplus SPHE8107H 8107S SoundBar DEMO Board Design Guide V1.0Alain Jaramillo Ruiz100% (1)
- KST CR Motion Cooperation 22 enDocument147 pagesKST CR Motion Cooperation 22 enMindaugas RimkusNo ratings yet
- Workbook P2KSS8 Programming 2 V1 enDocument145 pagesWorkbook P2KSS8 Programming 2 V1 enAlex PupkinNo ratings yet
- PIC Microcontroller Projects in C: Basic to AdvancedFrom EverandPIC Microcontroller Projects in C: Basic to AdvancedRating: 5 out of 5 stars5/5 (10)
- Fast Measurement: OptionDocument36 pagesFast Measurement: OptionNicolas RomeroNo ratings yet
- Soldadura Manual KukaDocument78 pagesSoldadura Manual KukaEduardoNo ratings yet
- High Voltage X-Ray GeneratorDocument52 pagesHigh Voltage X-Ray GeneratorMunish Dogra100% (4)
- Kuka Robot Sensor InterfaceDocument85 pagesKuka Robot Sensor InterfaceElbari Omar100% (1)
- Kuka - Robotsensorinterface (Rsi) 2.1: Kuka Robot Group Kuka System Technology (KST)Document57 pagesKuka - Robotsensorinterface (Rsi) 2.1: Kuka Robot Group Kuka System Technology (KST)Lourdes IbarraNo ratings yet
- 3hac050798 001Document412 pages3hac050798 001Péter DaniNo ratings yet
- 3HAC050798 AM Controller Software IRC5-EnDocument410 pages3HAC050798 AM Controller Software IRC5-EnGerardoNo ratings yet
- KST TouchSense 20 en PDFDocument53 pagesKST TouchSense 20 en PDFAlexander KozusevNo ratings yet
- Eginnering ToolsDocument82 pagesEginnering ToolsHerminio GómezNo ratings yet
- Advanced RAPID 3HAC020434-001 RevE enDocument78 pagesAdvanced RAPID 3HAC020434-001 RevE engryphon_quimeraNo ratings yet
- 3HAC066554 AM Controller Software OmniCore-EnDocument284 pages3HAC066554 AM Controller Software OmniCore-EncardonPTNo ratings yet
- IR Hull User GuideDocument60 pagesIR Hull User GuideWilliam DsouzaNo ratings yet
- Ecomat 100 Mobile Cr0301Document213 pagesEcomat 100 Mobile Cr0301mario kostovNo ratings yet
- KST RSI 32 enDocument87 pagesKST RSI 32 enMihail AvramovNo ratings yet
- KST ConveyorTech 51 enDocument57 pagesKST ConveyorTech 51 enOscar Jiménez gilNo ratings yet
- 7391000UKDocument233 pages7391000UKcaferNo ratings yet
- RobowareDocument442 pagesRobowareRui LopesNo ratings yet
- MR JE C Kullanim Kilavuzu Manual Mapping ChangeDocument32 pagesMR JE C Kullanim Kilavuzu Manual Mapping ChangeMuharrem GürpınarNo ratings yet
- KST EthernetKRL 22 enDocument79 pagesKST EthernetKRL 22 enМаксим ПNo ratings yet
- IRC5 Advanced Rapid 3HAC020434 001RevADocument88 pagesIRC5 Advanced Rapid 3HAC020434 001RevAadriano_falavinha9186No ratings yet
- KST GripperSpotTech 40 enDocument71 pagesKST GripperSpotTech 40 enJUAN LUIS MONTERO RODRÍGUEZNo ratings yet
- KST SeamTech Tracking 20 enDocument71 pagesKST SeamTech Tracking 20 enMihail AvramovNo ratings yet
- System Manual Smartcontroller: Cr2500 Cr2502Document300 pagesSystem Manual Smartcontroller: Cr2500 Cr2502caferNo ratings yet
- SW EngineerDocument210 pagesSW Engineerrenanrlo86No ratings yet
- 7 SJ 616264 Manualpixita 2 V 041001 UsDocument174 pages7 SJ 616264 Manualpixita 2 V 041001 Uslouie jay dionaldoNo ratings yet
- KUKA KRC2 Ed05 SafeRobot PDFDocument108 pagesKUKA KRC2 Ed05 SafeRobot PDFAnonymous MpAOJYNkNo ratings yet
- SYS600 Application DesignDocument488 pagesSYS600 Application DesignHai Pham MinhNo ratings yet
- Operating Manual: Introduction To RAPIDDocument56 pagesOperating Manual: Introduction To RAPIDReki SwandanaNo ratings yet
- KST Ethernet KRL 21 Kss8.2 enDocument77 pagesKST Ethernet KRL 21 Kss8.2 enalcNo ratings yet
- ConveyorTech KR C2Document73 pagesConveyorTech KR C2arturoNo ratings yet
- SecurOS Auto User GuideDocument85 pagesSecurOS Auto User GuideWilliamAlfonsoSanchezPaezNo ratings yet
- Ren Isl94212 Mas 20211117Document23 pagesRen Isl94212 Mas 20211117VanHieu LuyenNo ratings yet
- Magelis XBTGT, XBTGK HMI Controller: Programming GuideDocument104 pagesMagelis XBTGT, XBTGK HMI Controller: Programming GuidekhurramNo ratings yet
- KST Ethernet KRL 32 enDocument134 pagesKST Ethernet KRL 32 enPhạm BìnhNo ratings yet
- KST Ethernet KRL 20 enDocument75 pagesKST Ethernet KRL 20 enSarafraj BegNo ratings yet
- ISP CMS ThesisDocument51 pagesISP CMS ThesisHassan ShafiqueNo ratings yet
- Ecomat Mobile SeriesDocument298 pagesEcomat Mobile SeriesOSAMA zezoNo ratings yet
- SYS600 - IEC 61850 Master Protocol OPCDocument110 pagesSYS600 - IEC 61850 Master Protocol OPCMiroslav KhrapovNo ratings yet
- IX Developer - User Guide - Abr18Document54 pagesIX Developer - User Guide - Abr18faspNo ratings yet
- SYS600 System ObjectsDocument368 pagesSYS600 System ObjectsAbhijit JNo ratings yet
- ABAP Programming Standards-4.xDocument60 pagesABAP Programming Standards-4.xmanthan-raja-5759No ratings yet
- 680-021-11 Pc-NeT-003 ManualDocument66 pages680-021-11 Pc-NeT-003 ManualheshamNo ratings yet
- IFM ProgrammingDocument258 pagesIFM ProgrammingVăn ĐạtNo ratings yet
- KST PLC Mxautomation ProConOS 10 enDocument121 pagesKST PLC Mxautomation ProConOS 10 enLuisito Miguelito ErazoNo ratings yet
- Harshaqe Main ProjectDocument69 pagesHarshaqe Main ProjectAbhijithNo ratings yet
- PLC enDocument1,063 pagesPLC enRicardo RossettiNo ratings yet
- Ix Developer: User's GuideDocument48 pagesIx Developer: User's Guidevuhoan84No ratings yet
- SYS600 - System Objects PDFDocument326 pagesSYS600 - System Objects PDFBhageerathi SahuNo ratings yet
- KST ForceTorqueControl 30 en PDFDocument75 pagesKST ForceTorqueControl 30 en PDFRoger MorescoNo ratings yet
- 7um62xx Manual Pixit A4 v047001 enDocument214 pages7um62xx Manual Pixit A4 v047001 enevonik123456No ratings yet
- Renesas Flexible Software Package (FSP) v410 User ManualDocument4,346 pagesRenesas Flexible Software Package (FSP) v410 User Manualmar_barudjNo ratings yet
- VST EthernetKRL 22 en PDFDocument81 pagesVST EthernetKRL 22 en PDFMolitorisz AndorNo ratings yet
- 3HAC032104 OM RobotStudio-EnDocument382 pages3HAC032104 OM RobotStudio-EnIsraelNo ratings yet
- SYS600 - System ObjectsDocument368 pagesSYS600 - System ObjectsROHAN MOHAPATRANo ratings yet
- En ENBSP SDK Programmer's Guide DC1-0017A Rev JDocument321 pagesEn ENBSP SDK Programmer's Guide DC1-0017A Rev JFenix2010No ratings yet
- KST KUKA Ready2 Spray 10 enDocument63 pagesKST KUKA Ready2 Spray 10 enAkechai OunsiriNo ratings yet
- Original Programming Manual Classiccontroller Cr0032: Runtime System V02.01.06 Codesys V2.3Document247 pagesOriginal Programming Manual Classiccontroller Cr0032: Runtime System V02.01.06 Codesys V2.3kenan kılıçtaşNo ratings yet
- Turbine-Generator Shaft Torques and Fatigue - Part I - Simulation Methods and Fatigue AnalysisDocument9 pagesTurbine-Generator Shaft Torques and Fatigue - Part I - Simulation Methods and Fatigue AnalysisashishNo ratings yet
- Phev TechnicalDocument22 pagesPhev TechnicalIgor VidakovićNo ratings yet
- Sharing Lifes Joy With Mongodb: A Shutterfly Case StudyDocument16 pagesSharing Lifes Joy With Mongodb: A Shutterfly Case StudyKenny GormanNo ratings yet
- Debug 1214Document16 pagesDebug 1214razvan_f8No ratings yet
- 1747 Cp3 Wiring DiagramDocument1 page1747 Cp3 Wiring DiagramJose Martin Saavedra Crisanto0% (1)
- Lecture 3 ECE-737Document11 pagesLecture 3 ECE-737Patrick CoyneNo ratings yet
- SCR200 Manual enDocument16 pagesSCR200 Manual enAwiee WatanabeNo ratings yet
- Toshiba 8GB NAND TC58NVG3S0FTAI0 PDFDocument73 pagesToshiba 8GB NAND TC58NVG3S0FTAI0 PDFMilan MilenovicNo ratings yet
- Chips in Sci-DamaDocument1 pageChips in Sci-DamaBen Bandojo90% (10)
- RacewayDocument2 pagesRacewayJohn Philip BuntalesNo ratings yet
- Recent Endwinding Vibration Problems in Air-Cooled Turbine GeneratorsDocument8 pagesRecent Endwinding Vibration Problems in Air-Cooled Turbine GeneratorsAnonymous BBX2E87aHNo ratings yet
- Motortech Salesflyer Caterpillar Ignition Coils 01.15.017 en 2016 08Document12 pagesMotortech Salesflyer Caterpillar Ignition Coils 01.15.017 en 2016 08carlos angelNo ratings yet
- What Is Ro4003c Dielectric ConstantDocument11 pagesWhat Is Ro4003c Dielectric ConstantjackNo ratings yet
- Data Sheet (500w VAWT)Document3 pagesData Sheet (500w VAWT)invic7usNo ratings yet
- Two Day Faculty Development Programme On: "Hands-On Workshop On Matlab, Simulink and Its Applications"Document2 pagesTwo Day Faculty Development Programme On: "Hands-On Workshop On Matlab, Simulink and Its Applications"kunal13No ratings yet
- Siemens Drives - SINAMICS G110 Operating InstructionsDocument92 pagesSiemens Drives - SINAMICS G110 Operating Instructionsmelfer100% (3)
- VCP LeafletDocument8 pagesVCP LeafletAONLANo ratings yet
- Graduation Project PresentationDocument40 pagesGraduation Project PresentationSadiq Ibrahim shuaibuNo ratings yet
- Testing Variable-Wavelength Photometric Detectors Used in Liquid ChromatographyDocument8 pagesTesting Variable-Wavelength Photometric Detectors Used in Liquid ChromatographyROHITNo ratings yet
- Designing NFC AntennaDocument20 pagesDesigning NFC Antennas6666hussia6No ratings yet
- ABB Product Note - Condensers - Lowres PDFDocument2 pagesABB Product Note - Condensers - Lowres PDFbudituxNo ratings yet
- MCC - 2100 sr012 - en PDocument26 pagesMCC - 2100 sr012 - en Pjosevil79No ratings yet
- 2006 Fuse Block Till 3-2007Document3 pages2006 Fuse Block Till 3-2007Fikret VelagićNo ratings yet
- VB Keycode ChartDocument5 pagesVB Keycode Chartaputra_28No ratings yet
- MNRE Series Guidelines For InverterDocument6 pagesMNRE Series Guidelines For InverterJEY KEYNo ratings yet
- ECS Prospekt A4 2022 English LRDocument12 pagesECS Prospekt A4 2022 English LRmusiqmaestrosNo ratings yet
- 0 1concepts of Modern Physics Aurthur BeiserDocument8 pages0 1concepts of Modern Physics Aurthur BeiserSanjeev JamatiaNo ratings yet
- 3500B Series II: Supplemental Application and Installation GuideDocument20 pages3500B Series II: Supplemental Application and Installation GuideJose AntonioNo ratings yet