Download as pdf or txt
You might also like
- Viva Questions For BEE (MU) PDFDocument46 pagesViva Questions For BEE (MU) PDFAbhishek Chaudhary78% (9)
- 4Document15 pages4phamdienthongNo ratings yet
- LAB10Document8 pagesLAB10Juan Camilo Guarnizo Bermudez100% (1)
- Standards.: General Fastener Standards BS OrderDocument33 pagesStandards.: General Fastener Standards BS OrderamdarvishvandNo ratings yet
- Journal Bearing VibrationDocument10 pagesJournal Bearing Vibrationalex roNo ratings yet
- EDC - Modelling and Designing of BJT AmplifierDocument12 pagesEDC - Modelling and Designing of BJT AmplifierSamkit JainNo ratings yet
- MIT18 03SCF11 ps5 II s20sDocument5 pagesMIT18 03SCF11 ps5 II s20sBild LucaNo ratings yet
- AC BJT Analysis Lecture 3 PDFDocument8 pagesAC BJT Analysis Lecture 3 PDFXxx CccNo ratings yet
- Molecul h2 NormalisasiDocument5 pagesMolecul h2 NormalisasiendahNo ratings yet
- Weakly Differentiable Functions Volume 120 - Sobolev Spaces and Their Basic PropertiesDocument70 pagesWeakly Differentiable Functions Volume 120 - Sobolev Spaces and Their Basic PropertiesHam Karim RUPPNo ratings yet
- Phy301 Solution by Kinza BilalDocument7 pagesPhy301 Solution by Kinza Bilalkhani gNo ratings yet
- Frequency Response and Bode Plots: 1.1 PreliminariesDocument20 pagesFrequency Response and Bode Plots: 1.1 PreliminariesAmresh VarshneyNo ratings yet
- Experiment 3. Single Tuned AmplifiersDocument14 pagesExperiment 3. Single Tuned AmplifiersSanjeev PandeyNo ratings yet
- ELE302 NotesDocument70 pagesELE302 NotesAnmol PanchalNo ratings yet
- CH 10 FeebackDocument127 pagesCH 10 Feeback鄭又嘉No ratings yet
- Hydrogen QMDocument20 pagesHydrogen QMAmanpreetNo ratings yet
- ECT Classical MethodsDocument20 pagesECT Classical MethodsDomenica Belen Saraguro CarreraNo ratings yet
- Notation To Specify A Language: Theory of Computation - Regular ExpressionsDocument23 pagesNotation To Specify A Language: Theory of Computation - Regular ExpressionsHimañshu BhattNo ratings yet
- Esc201A: Introduction To Electronics Midsem Exam 18 Sept. 2017Document12 pagesEsc201A: Introduction To Electronics Midsem Exam 18 Sept. 2017monalNo ratings yet
- Calculating Optimum SnubbersDocument13 pagesCalculating Optimum SnubbersSatoTNo ratings yet
- 8 - Chapter 7Document10 pages8 - Chapter 7AhmedNo ratings yet
- Theory of Computation - Regular ExpressionsDocument23 pagesTheory of Computation - Regular ExpressionslogNo ratings yet
- Transistor H-Parameter AnalysisDocument51 pagesTransistor H-Parameter AnalysisPushkin Saxena67% (9)
- Op Amp DerivationsDocument12 pagesOp Amp DerivationsSam LastNo ratings yet
- Semiconductor Laser Diodes, Optical Transmitter, Optical ReceiversDocument6 pagesSemiconductor Laser Diodes, Optical Transmitter, Optical ReceiversurbanaaymarNo ratings yet
- Electronic Circuits 1 Mid-Term Exam 1Document5 pagesElectronic Circuits 1 Mid-Term Exam 1정연종No ratings yet
- Physics 9 Fall 2009Document11 pagesPhysics 9 Fall 2009exia0012No ratings yet
- Transient ResponseDocument20 pagesTransient Responseapi-3757260No ratings yet
- 16 Transint rlc2Document20 pages16 Transint rlc2Ejaz MahfuzNo ratings yet
- Parametric Equations and Polar Coordinates 11.7. Conic Sections in Polar CoordinatesDocument5 pagesParametric Equations and Polar Coordinates 11.7. Conic Sections in Polar Coordinatessujit kcNo ratings yet
- The Vector Potential: 1 Introducing ADocument5 pagesThe Vector Potential: 1 Introducing ArajuNo ratings yet
- Transmission Lines: 1 Single Transmission-Line EquationsDocument5 pagesTransmission Lines: 1 Single Transmission-Line EquationsIoan TudosaNo ratings yet
- JollyGS Design Simulation and Characterisation of A Class-B Audio Power AmplifierDocument31 pagesJollyGS Design Simulation and Characterisation of A Class-B Audio Power AmplifierMortenGundersenNo ratings yet
- Boundary ControlDocument13 pagesBoundary ControlJacques KazakuNo ratings yet
- The Common-Base Amplifier Basic Circuit: BB + 2 1 1 2 BB 1 2 EE E CC + CC C BE BB EE C C BB BE C EEDocument8 pagesThe Common-Base Amplifier Basic Circuit: BB + 2 1 1 2 BB 1 2 EE E CC + CC C BE BB EE C C BB BE C EEdominggoNo ratings yet
- Brune SynthesisDocument7 pagesBrune SynthesisPranjal RaiNo ratings yet
- Chapter 5 Frequency ResponceDocument15 pagesChapter 5 Frequency ResponceCraig PeriNo ratings yet
- Lec26 AssDocument5 pagesLec26 AssFarid AkhtarNo ratings yet
- Quantum Mechanics HomeworkDocument3 pagesQuantum Mechanics HomeworkJuliana Marquez BustosNo ratings yet
- Lewin PDFDocument22 pagesLewin PDFSubash ChandarNo ratings yet
- Measurement Problem II: The Modal Interpretation, The Epistemic Interpretation, The Relational Interpretation, Decoherence, and Wigner's FormulaDocument30 pagesMeasurement Problem II: The Modal Interpretation, The Epistemic Interpretation, The Relational Interpretation, Decoherence, and Wigner's Formulametreus30No ratings yet
- Analog Circuits Practice Lab: Experiment-7: Circuits Using Operational AmplifiersDocument9 pagesAnalog Circuits Practice Lab: Experiment-7: Circuits Using Operational AmplifiersDeepikaNo ratings yet
- ProblemasDocument6 pagesProblemasHenrique Patriota AlvesNo ratings yet
- Inductive and Magnetic SensorsDocument7 pagesInductive and Magnetic SensorsJefersonNo ratings yet
- Ee122 Freq Resp RevnotesDocument6 pagesEe122 Freq Resp RevnotesMicro EmissionNo ratings yet
- 6.003 Homework 3: ProblemsDocument4 pages6.003 Homework 3: ProblemsIsrael SmithNo ratings yet
- Lecture 12Document14 pagesLecture 12r prathapNo ratings yet
- SU (2) and SO (3) : 1 The Group of RotationsDocument5 pagesSU (2) and SO (3) : 1 The Group of RotationsmarioasensicollantesNo ratings yet
- Smith Chart TutorialDocument23 pagesSmith Chart Tutorialamado_mar66160% (1)
- Chap 3Document40 pagesChap 3eshbliNo ratings yet
- Chapter 12 Bode PlotsDocument39 pagesChapter 12 Bode PlotsMayar Magdy MorkosNo ratings yet
- Common Emitter Un Bypassed Emitter - Fixed Bias ConfigurationDocument14 pagesCommon Emitter Un Bypassed Emitter - Fixed Bias ConfigurationForge lastNo ratings yet
- 3 Assumptions and ApproximationsDocument5 pages3 Assumptions and ApproximationsJack RyderNo ratings yet
- Sensors and Actuators Engineering System Instrumentation 2nd Silva Solution ManualDocument36 pagesSensors and Actuators Engineering System Instrumentation 2nd Silva Solution Manualspunkycantingzcat100% (54)
- Duren - Geometric Function TheoryDocument40 pagesDuren - Geometric Function Theoryudin-san100% (1)
- 1 + 1 = 1 An Introduction to Boolean Algebra and Switching CircuitsFrom Everand1 + 1 = 1 An Introduction to Boolean Algebra and Switching CircuitsRating: 4 out of 5 stars4/5 (2)
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Real Variables with Basic Metric Space TopologyFrom EverandReal Variables with Basic Metric Space TopologyRating: 5 out of 5 stars5/5 (1)
- Ecox2: Recycled Impact Sound Reduction Underlayment For LVT Plank FlooringDocument1 pageEcox2: Recycled Impact Sound Reduction Underlayment For LVT Plank Flooringstefan cirlanaruNo ratings yet
- Atomic Structure PDFDocument49 pagesAtomic Structure PDFAshishNo ratings yet
- H 99 Sec 8 D 1 App 1Document9 pagesH 99 Sec 8 D 1 App 1Benjamin Enmanuel Mango DNo ratings yet
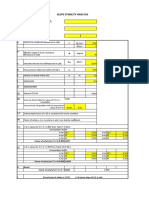
- Software Slope Stabilty Analysis FinalDocument1 pageSoftware Slope Stabilty Analysis FinalETTL UDAIPURNo ratings yet
- Clark Development Corporation BD-Power Transmission Line - Phase 3BDocument134 pagesClark Development Corporation BD-Power Transmission Line - Phase 3BMichael Parohinog Gregas100% (1)
- InclinometerDocument5 pagesInclinometerAnis MulyaniNo ratings yet
- Service Lift: - M. Kashif Jameel - Gaurav Khatwani - Donesh Raut - Isha Dhote - Gulnanda GahaneDocument17 pagesService Lift: - M. Kashif Jameel - Gaurav Khatwani - Donesh Raut - Isha Dhote - Gulnanda Gahanerahul sulakheNo ratings yet
- CIV E 354 Geotechnical Engineering Ii: by Giovanni CascanteDocument11 pagesCIV E 354 Geotechnical Engineering Ii: by Giovanni CascanteVNo ratings yet
- PGG-EG Governor ActuatorDocument4 pagesPGG-EG Governor Actuatorrodruren010% (1)
- TD Mscaps 1 14.10.25 Doku API MyshortcartDocument20 pagesTD Mscaps 1 14.10.25 Doku API MyshortcartDA FI100% (1)
- Service Manual: Chassis, Mast & OptionsDocument37 pagesService Manual: Chassis, Mast & OptionsIsos Cell0% (1)
- A6211 Datasheet PDFDocument18 pagesA6211 Datasheet PDFNestor GlezNo ratings yet
- P 40 Color BrochureDocument4 pagesP 40 Color BrochureProject Sales CorpNo ratings yet
- Guide Du Propriétaire Owner's Guide Guía Del Usuario: Robot Aspirateur Robot AspiradorDocument37 pagesGuide Du Propriétaire Owner's Guide Guía Del Usuario: Robot Aspirateur Robot AspiradoralelendoNo ratings yet
- L136T/Tl Marine EngineDocument2 pagesL136T/Tl Marine EngineAhmet GelişliNo ratings yet
- Data Base Management System LabDocument21 pagesData Base Management System LabUsmanyusufNo ratings yet
- Click Here To Download IG Reels GuideDocument12 pagesClick Here To Download IG Reels GuidePampuliciNo ratings yet
- Transistor MCQDocument5 pagesTransistor MCQMark BelasaNo ratings yet
- Motion Control With LabviewDocument30 pagesMotion Control With Labviewsocat120013485No ratings yet
- Storage Chart Freeze ItDocument1 pageStorage Chart Freeze ItKimbre BellhouseNo ratings yet
- MC14538B Dual Precision Retriggerable/Resettable Monostable MultivibratorDocument12 pagesMC14538B Dual Precision Retriggerable/Resettable Monostable MultivibratorAbel RodriguezNo ratings yet
- Basic Aerodynamics Module 4Document86 pagesBasic Aerodynamics Module 4Gadadhar DeyNo ratings yet
- High Availability MySQL Database Replication With Solaris Zone ClusterDocument26 pagesHigh Availability MySQL Database Replication With Solaris Zone ClustertzakitsanNo ratings yet
- Persamaan Konduksi & Kasus - Bag 1Document25 pagesPersamaan Konduksi & Kasus - Bag 1ArdanNo ratings yet
- Is 210-1993Document12 pagesIs 210-1993Amal SamantaNo ratings yet
- MAC Address and MAC FilteringDocument2 pagesMAC Address and MAC FilteringCleo RubinoNo ratings yet
- Group 7 Final Project Report - Automatic Night LightDocument15 pagesGroup 7 Final Project Report - Automatic Night LightBen RileyNo ratings yet
- SOP-T-0005 - Standard Operating (Test) Procedure - CUBE TESTDocument18 pagesSOP-T-0005 - Standard Operating (Test) Procedure - CUBE TESTAvidip DeyNo ratings yet