
Iijcs 2014 06 20 014
Iijcs 2014 06 20 014
You might also like
- Speakers Guidebook Text and Reference 7th Edition Ohair Test BankDocument15 pagesSpeakers Guidebook Text and Reference 7th Edition Ohair Test Bankbrendabrownipnmktbzas100% (14)
- 1 - Script Ceu Azul 2023Document21 pages1 - Script Ceu Azul 2023Indigo Graficos50% (2)
- Intelligent Decision Based Route Selection and Maintenance Approach Using AOMDV in VANETDocument9 pagesIntelligent Decision Based Route Selection and Maintenance Approach Using AOMDV in VANETIJRASETPublicationsNo ratings yet
- An Efficient Routing Mechanism For Vehicular Ad Hoc NetworksDocument4 pagesAn Efficient Routing Mechanism For Vehicular Ad Hoc NetworksEditor IJRITCCNo ratings yet
- Survey On Route Discovery Based On Congestion in Vanet (Vehicular Ad-Hoc Networks)Document3 pagesSurvey On Route Discovery Based On Congestion in Vanet (Vehicular Ad-Hoc Networks)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- S - 2 ITS: Tudy of The Effect of Velocity On End TO End Delay For V V Communication inDocument8 pagesS - 2 ITS: Tudy of The Effect of Velocity On End TO End Delay For V V Communication inijngnNo ratings yet
- Comparison and Analysis of Greedy Forwarding Using BNGF Method in Different Vehicular Traffic ScenariosDocument14 pagesComparison and Analysis of Greedy Forwarding Using BNGF Method in Different Vehicular Traffic ScenariosijngnNo ratings yet
- Routing Protocols in Vehicular Ad Hoc Networks: A Survey and Future PerspectivesDocument20 pagesRouting Protocols in Vehicular Ad Hoc Networks: A Survey and Future PerspectivesVreddy ReddyNo ratings yet
- A Novel Reliable Low-Latency Multipath Routing Scheme For Vehicular Ad Hoc NetworksDocument19 pagesA Novel Reliable Low-Latency Multipath Routing Scheme For Vehicular Ad Hoc NetworksMahabub SubhaniNo ratings yet
- Session 01 - Paper 14Document7 pagesSession 01 - Paper 14Nicholas DawsonNo ratings yet
- Increasing The Route Lifetime Stability of Lar Protocol For Vanets in Highway EnvironmentDocument10 pagesIncreasing The Route Lifetime Stability of Lar Protocol For Vanets in Highway EnvironmentnabilNo ratings yet
- Evaluation The Performance of MAODV and AODV Protocols in VANETs ModelsDocument12 pagesEvaluation The Performance of MAODV and AODV Protocols in VANETs ModelsAI Coordinator - CSC JournalsNo ratings yet
- Performance Study of Multi-Path in Vanets and Their Impact On Routing ProtocolsDocument5 pagesPerformance Study of Multi-Path in Vanets and Their Impact On Routing Protocolsashish88bhardwaj_314No ratings yet
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument8 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- Intelligent Driver Mobility Model and Traffic Pattern Generation Based Optimization of Reactive Protocols For Vehicular Ad-Hoc NetworksDocument8 pagesIntelligent Driver Mobility Model and Traffic Pattern Generation Based Optimization of Reactive Protocols For Vehicular Ad-Hoc Networksstephenlim7986No ratings yet
- Performance Analysis of AODV, DSR and ZRP Protocols in Vehicular Ad-Hoc Network Using QualnetDocument5 pagesPerformance Analysis of AODV, DSR and ZRP Protocols in Vehicular Ad-Hoc Network Using QualnetInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Effective Routing Based On Overhead ReductionDocument9 pagesEffective Routing Based On Overhead ReductionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Probabilistic Routing Using Queuing Theory For ManetsDocument15 pagesProbabilistic Routing Using Queuing Theory For ManetsJohn BergNo ratings yet
- Performances of Ad Hoc Networks Under Deterministic and Probabilistic Channel Conditions: Cases For Single Path and Multipath Routing ProtocolsDocument21 pagesPerformances of Ad Hoc Networks Under Deterministic and Probabilistic Channel Conditions: Cases For Single Path and Multipath Routing ProtocolsAIRCC - IJCNCNo ratings yet
- Performance Analysis of Traffic Type and Routing PDocument11 pagesPerformance Analysis of Traffic Type and Routing PalissonzkvNo ratings yet
- Simulation Analysis of AODV Routing Protocol of Manet Using OpnetDocument3 pagesSimulation Analysis of AODV Routing Protocol of Manet Using Opnetمحمود كريمNo ratings yet
- Performance of VANET Through Realistic Large Scale Fading ChannelsDocument6 pagesPerformance of VANET Through Realistic Large Scale Fading ChannelsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Link State RoutingDocument16 pagesLink State Routingnikpetar1No ratings yet
- Performance Evaluation of Manet Routing Protocols On The Basis of TCP Traffic PatternDocument8 pagesPerformance Evaluation of Manet Routing Protocols On The Basis of TCP Traffic PatternijitcsNo ratings yet
- Feasibility Study of DSDV and AODV Routing Protocols in Mobile Sensor NetworksDocument7 pagesFeasibility Study of DSDV and AODV Routing Protocols in Mobile Sensor NetworksSabin BhandariNo ratings yet
- Study and Analysis of Throughput, Delay and Packet Delivery Ratio in MANET For Topology Based Routing Protocols (AODV, DSR and DSDV)Document5 pagesStudy and Analysis of Throughput, Delay and Packet Delivery Ratio in MANET For Topology Based Routing Protocols (AODV, DSR and DSDV)PremKumarNo ratings yet
- NS2 Report - Analysis of AODV & DSDV Routing Protocol: Muhammad SamiDocument3 pagesNS2 Report - Analysis of AODV & DSDV Routing Protocol: Muhammad SamiSamiunnNo ratings yet
- Design and Implementation of Hybrid Routing Algorithm For VANETDocument5 pagesDesign and Implementation of Hybrid Routing Algorithm For VANETWARSE JournalsNo ratings yet
- CH111Document6 pagesCH111informatiquehageryahoo.frNo ratings yet
- Analysing The Interaction Between Mobility Model and Unipath Routing Protocols in Mobile Ad Hoc NetworksDocument7 pagesAnalysing The Interaction Between Mobility Model and Unipath Routing Protocols in Mobile Ad Hoc NetworkseditorijaiemNo ratings yet
- Literature SurveyDocument3 pagesLiterature SurveypooanajiNo ratings yet
- Aodv Protocol ThesisDocument4 pagesAodv Protocol ThesisSarah MarieNo ratings yet
- Study of Distance Vector Routing Protocols For Mobile Ad Hoc NetworksDocument8 pagesStudy of Distance Vector Routing Protocols For Mobile Ad Hoc NetworksSai SaurabNo ratings yet
- Improved Network Performance by Avoiding Attack On Routing Path Using Shortest Path RoutingDocument7 pagesImproved Network Performance by Avoiding Attack On Routing Path Using Shortest Path RoutingAnonymous Ndsvh2soNo ratings yet
- Ijcet: International Journal of Computer Engineering & Technology (Ijcet)Document9 pagesIjcet: International Journal of Computer Engineering & Technology (Ijcet)شهاب الدينNo ratings yet
- Routing Protocol For Intermittent Connected VANET by Using Real Time Traffic Information SystemDocument5 pagesRouting Protocol For Intermittent Connected VANET by Using Real Time Traffic Information SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- LAR MA NetDocument5 pagesLAR MA NetSatyaNo ratings yet
- Current Routing Strategies To Adapt The Characteristics: Prof. Ananad L.MothghareDocument2 pagesCurrent Routing Strategies To Adapt The Characteristics: Prof. Ananad L.MothghareInternational Journal of computational Engineering research (IJCER)No ratings yet
- An Efficient Passive Approach For Quality of Service Routing in ManetsDocument6 pagesAn Efficient Passive Approach For Quality of Service Routing in Manetssurendiran123No ratings yet
- Mis 2019Document16 pagesMis 2019nabilNo ratings yet
- 2013 Procedia Technology MojtabaDocument7 pages2013 Procedia Technology MojtabaMahamod IsmailNo ratings yet
- A Simulation Study of Routing Protocols For Vehicular Ad Hoc Networks Based On OPNETDocument4 pagesA Simulation Study of Routing Protocols For Vehicular Ad Hoc Networks Based On OPNETANas AliNo ratings yet
- MANET Reactive Protocols-Tutorial Review: Jahangir KhanDocument3 pagesMANET Reactive Protocols-Tutorial Review: Jahangir KhanSomsubhra DasNo ratings yet
- A Comparative Study of Broadcast Based Routing Protocols in Mobile Ad Hoc NetworksDocument6 pagesA Comparative Study of Broadcast Based Routing Protocols in Mobile Ad Hoc NetworksInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Ijcses 040303Document10 pagesIjcses 040303ijcsesNo ratings yet
- A Novel Approach To Efficient and Reliable RoutingDocument4 pagesA Novel Approach To Efficient and Reliable RoutingconwamcNo ratings yet
- Anycast Based Routing in Vehicular Adhoc Networks (VANETS) Using VanetmobisimDocument11 pagesAnycast Based Routing in Vehicular Adhoc Networks (VANETS) Using VanetmobisimhongnhNo ratings yet
- A Review of Routing Protocols in Mobile Ad Hoc NetworksDocument4 pagesA Review of Routing Protocols in Mobile Ad Hoc NetworksjamesjiangqianNo ratings yet
- 4 IjecsDocument5 pages4 IjecsPiyush ChouhanNo ratings yet
- Parametric Analysis of Mobile Ad-Hoc Network Environment: M.Shahaya Sheela, A.Sivanantha Raja and V.R.Sarma DhulipalaDocument4 pagesParametric Analysis of Mobile Ad-Hoc Network Environment: M.Shahaya Sheela, A.Sivanantha Raja and V.R.Sarma DhulipalaAdrian BorleaNo ratings yet
- VANET Routing Protocols :implementation and Analysis Using NS3 and SUMODocument6 pagesVANET Routing Protocols :implementation and Analysis Using NS3 and SUMOVelumani sNo ratings yet
- An Implementation in AODV Based On Active Route Timeout Between Sensor Nodes in Wireless Sensor NetworksDocument7 pagesAn Implementation in AODV Based On Active Route Timeout Between Sensor Nodes in Wireless Sensor NetworksMurugan SanjayNo ratings yet
- Evaluation of Various Traffic Loads in MANET With DSR Routing Protocol Through Use of OPNET SimulatorDocument9 pagesEvaluation of Various Traffic Loads in MANET With DSR Routing Protocol Through Use of OPNET SimulatorijdpsNo ratings yet
- Critical Review of Routing ProtocolsDocument13 pagesCritical Review of Routing ProtocolsconflictedNo ratings yet
- Predicting The Longest Route Lifetime As The Most Stable Route Between Two Vehicles in VANETDocument9 pagesPredicting The Longest Route Lifetime As The Most Stable Route Between Two Vehicles in VANETnabilNo ratings yet
- Almaashri 3545Document10 pagesAlmaashri 3545Hayat BokkhariNo ratings yet
- IjrsatDocument4 pagesIjrsatSrikanth ShanmukeshNo ratings yet
- Aodv ThesisDocument4 pagesAodv ThesisBrittany Brown100% (1)
- Throughput and Delay Analysis of Next-HOP Forwarding Method For Non-Linear Ehicular AD HOC NetworksDocument12 pagesThroughput and Delay Analysis of Next-HOP Forwarding Method For Non-Linear Ehicular AD HOC NetworksijansjournalNo ratings yet
- Improving Qos Using Multipath Routing Backbones in ManetDocument22 pagesImproving Qos Using Multipath Routing Backbones in ManetBalram GunasekarNo ratings yet
- 1.1 Problem Statement: It Is Sometimes NotDocument4 pages1.1 Problem Statement: It Is Sometimes Notpiyushji125No ratings yet
- Detection of Malicious Web Contents Using Machine and Deep Learning ApproachesDocument6 pagesDetection of Malicious Web Contents Using Machine and Deep Learning ApproachesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- THE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSDocument7 pagesTHE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Study of Customer Experience and Uses of Uber Cab Services in MumbaiDocument12 pagesStudy of Customer Experience and Uses of Uber Cab Services in MumbaiInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Mexican Innovation System: A System's Dynamics PerspectiveDocument12 pagesThe Mexican Innovation System: A System's Dynamics PerspectiveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Soil Stabilization of Road by Using Spent WashDocument7 pagesSoil Stabilization of Road by Using Spent WashInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Analysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyDocument6 pagesAnalysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDocument8 pagesDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Staycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityDocument10 pagesStaycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Performance of Short Transmission Line Using Mathematical MethodDocument8 pagesPerformance of Short Transmission Line Using Mathematical MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)Document10 pagesA Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Deep Learning Based Assistant For The Visually ImpairedDocument11 pagesA Deep Learning Based Assistant For The Visually ImpairedInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Swot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictDocument5 pagesSwot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Synthetic Datasets For Myocardial Infarction Based On Actual DatasetsDocument9 pagesSynthetic Datasets For Myocardial Infarction Based On Actual DatasetsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Anchoring of Inflation Expectations and Monetary Policy Transparency in IndiaDocument9 pagesAnchoring of Inflation Expectations and Monetary Policy Transparency in IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Impact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryDocument8 pagesImpact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Ijaiem 2021 01 28 6Document9 pagesIjaiem 2021 01 28 6International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationDocument13 pagesDesign and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaDocument5 pagesThe Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Potret, Esensi, Target Dan Hakikat Spiritual Quotient Dan ImplikasinyaDocument13 pagesPotret, Esensi, Target Dan Hakikat Spiritual Quotient Dan ImplikasinyaALFI ROSYIDA100% (1)
- Assignments in English Plus 7 THDocument32 pagesAssignments in English Plus 7 THam388488100% (1)
- Tait Specifications TP8100 USDocument4 pagesTait Specifications TP8100 USepitaNo ratings yet
- Noncavernous Arteriovenous Shunts Mimicking Carotid Cavernous FistulaeDocument5 pagesNoncavernous Arteriovenous Shunts Mimicking Carotid Cavernous FistulaeClarithq LengguNo ratings yet
- Placa Mãe HD7Document3 pagesPlaca Mãe HD7ALBANO2No ratings yet
- Liza ItineraryDocument23 pagesLiza Itineraryjose randyNo ratings yet
- BELBIN Team Role Summary DescriptionsDocument1 pageBELBIN Team Role Summary DescriptionsashairwaysNo ratings yet
- Textbook Mapping Modernisms Art Indigeneity Colonialism Elizabeth Harney Ebook All Chapter PDFDocument53 pagesTextbook Mapping Modernisms Art Indigeneity Colonialism Elizabeth Harney Ebook All Chapter PDFcharles.valle114100% (11)
- Ind Pharm 5th SemDocument12 pagesInd Pharm 5th Semsuyash jainNo ratings yet
- Caterpillar Engine Service Manual CT S Eng33068zDocument10 pagesCaterpillar Engine Service Manual CT S Eng33068zEliseeNo ratings yet
- Hosts and Guests - WorksheetDocument2 pagesHosts and Guests - WorksheetbeeNo ratings yet
- Reassembly: 1. Assemble Piston and Connecting RodDocument7 pagesReassembly: 1. Assemble Piston and Connecting Roddawitmesfin9No ratings yet
- Freight Chargers CalclationDocument2 pagesFreight Chargers CalclationAkama KulasekaraNo ratings yet
- Norsok Materials GuideDocument37 pagesNorsok Materials GuideYomara Samantha Hernandez LaureanoNo ratings yet
- Environmental Movements in IndiaDocument2 pagesEnvironmental Movements in IndiaAnonymous Wz2iwNeGRDNo ratings yet
- 1st Sem Mid Term PYQs 2018&2019Document20 pages1st Sem Mid Term PYQs 2018&2019Sujeet RaiNo ratings yet
- Sec eDocument2 pagesSec eVicter PaulNo ratings yet
- AGR3502 Rice Production: Food CropsDocument36 pagesAGR3502 Rice Production: Food CropsSleeping BeautyNo ratings yet
- NP181Document5 pagesNP181Psycho ScorpionNo ratings yet
- M02 MeasrmentDocument81 pagesM02 MeasrmentgmnatigizawNo ratings yet
- Man's Real Nature Is DivineDocument37 pagesMan's Real Nature Is DivineMinakshi KanuNo ratings yet
- Installation Qualification For Informatic System ExampleDocument7 pagesInstallation Qualification For Informatic System ExampleCarlos SanchezNo ratings yet
- Manual de Utilizare Sursa de Alimentare 27.6 V5 A Pulsar EN54-5A17 230 VAC50 HZ Montaj Aparent LEDDocument40 pagesManual de Utilizare Sursa de Alimentare 27.6 V5 A Pulsar EN54-5A17 230 VAC50 HZ Montaj Aparent LEDGabriel SerbanNo ratings yet
- Sigmazinc™ 102 HS: Product Data SheetDocument4 pagesSigmazinc™ 102 HS: Product Data Sheetyogeshkumar121998No ratings yet
- Integrate Pentaho With MapR Using Apache DrillDocument13 pagesIntegrate Pentaho With MapR Using Apache DrillDat TranNo ratings yet
- AUTOSAR EXP NVDataHandling 2Document52 pagesAUTOSAR EXP NVDataHandling 2afraNo ratings yet
- 2019 Colloquium Draft March 12Document33 pages2019 Colloquium Draft March 12Jessica BrummelNo ratings yet
- The Importance of TeamworkDocument8 pagesThe Importance of TeamworkBraga MihaelaNo ratings yet











































































































Download as pdf or txt
IPASJ International Journal of Computer Science(IIJCS)
Web Site: http://www.ipasj.org/IIJCS/IIJCS.htm
A Publisher for Research Motivation ........ Email: editoriijcs@ipasj.org
Volume 2, Issue 6, June 2014 ISSN 2321-5992
Volume 2 Issue 6 June 2014 Page 5
Abstract
Vehicular Adhoc Networks (VANETs) are highly mobile wireless networks that are designed to support vehicular safety, traffic
monitoring, and other commercial applications. VANETs are used for short-range, high-speed communication among nearby
vehicles, and between vehicles and roadside infrastructure units. Vehicle mobility will cause the communication links between
vehicles to be broken frequently. Such link failures require a direct response from the routing protocols, leading to a potentially
excessive increase in the routing overhead and degradation in network scalability. Link failure rate will differ for different
traffic conditions like low, medium and dense. In this paper an adaptive routing is proposed which in turn uses both reactive
and proactive protocols to continue with network communication by reducing the link failure rate. Due to the reduction of link
failures the number of packets delivered is improved.
Keywords: Fisheye State Routing, On Demand Routing, Zone Based Routing.
1. INTRODUCTION
Communication between vehicles by means of wireless technology has a large potential to improve traffic safety and
travel comfort of drivers and passengers. Several potential applications in the area of inter-vehicle communications
require data routing algorithms for the underlying ad hoc network, with the sharp increase of vehicles on roads in the
recent years, driving has not stopped from being more challenging and dangerous. Roads are saturated, safety distance
and reasonable speeds are hardly respected, and drivers often lack enough attention.
2. RELATED WORKS
Several routing protocols have been defined by many researchers for VANET. With the passage of time there is a need
of having new protocols in order to have successful communication. The history of VANET routing begins with the
traditional MANET routing protocols. Several topology based routing protocols for MANET had been analyzed for
VANET. Jerome Haerri et.al evaluated the performance of AODV and OLSR for VANET in city environment, in their
study in which all the characteristics are handled through the Vehicle Mobility Model. Performance analyses of
traditional ad-hoc routing protocols like AODV, DSDV and DSR for the highway scenarios have been presented, and
the authors proposed that these routing protocols are not suitable for VANET because of rapid topology changes. Their
simulation results showed that these conventional routing protocols of MANET increase the routing load on network,
and decrease the packet delivery ratio and end to end delay. Kakkasageri compared AODV and DSR with Swarm
intelligence routing algorithm and have shown that AODV and DSR has less performance than swarm intelligence
routing algorithm in VANET. Even though many researchers proposed various routing protocols for different
environment and architecture of VANETs, effective packet delivery is still a very big challenge.
3. PROPOSED ADAPTIVE ROUTING
In real life, vehicles are moving at different speed in different traffic conditions. If the vehicles are connected by some
means without considering the different speed of vehicles, it can be considered as VANET. It will not be effective if
same protocol is employed for all traffic conditions. An adaptive routing protocol is proposed to make the VANET
more efficient for all traffic conditions. This adaptive routing protocol is not a new protocol; it employs different
existing routing protocols for different scenarios. This adaptive routing protocol is proposed mainly for highly dense
traffic at urban area and highway and also with medium and low traffic conditions for the same. In this protocol, three
types of routing protocols are used depends on the traffic. They are link state routing, zone based routing and on
demand routing protocol.
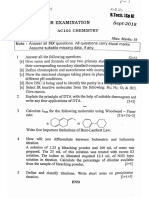
The traffic is said to be dense or medium or low based on the number of nodes in the area of interest. But, in VANET,
it is sufficient to detect the number of neighbor nodes in order to check the traffic condition. In our proposed work, the
different routing protocols are selected based on the number of neighbor nodes. Selection procedure is shown as a
flowchart in the Fig.1. Hence if this routing protocol is employed, it will be adaptable to all environments independent
of the number of neighbors. To employ this protocol, maintaining a counter in each node to indicate the number of
Adaptive Routing for Vehicular Adhoc Networks
with Low, Medium and Dense Traffic
M.S.Godwin Premi, Betty Martin, S.Maflin Shaby
Faculty of EEE, Sathyabama University, Chennai-119
IPASJ International Journal of Computer Science(IIJCS)
Web Site: http://www.ipasj.org/IIJCS/IIJCS.htm
A Publisher for Research Motivation ........ Email: editoriijcs@ipasj.org
Volume 2, Issue 6, June 2014 ISSN 2321-5992
Volume 2 Issue 6 June 2014 Page 6
neighbor nodes and maintaining a link state table/routing table in each node to find the shortest route that is necessary.
Since the vehicular networks are capable of providing enough power and enough memory, maintaining these conditions
will not be a problem in VANETs.
Fig.1: Selection of routing protocol
In our proposed protocol, the link failure rate is reduced if the routing protocol is switched from one to other. When the
number of neighbor nodes is equal to m no. of nodes then the fisheye state routing is selected. Fisheye State Routing
(FSR) is a type of link state routing and it is a proactive routing protocol. In this protocol, route is determined at every
node by maintaining a link state map or topology map. The link state table implicitly acts like the routing table. There
are three major phases in the protocol. They are Neighbor Discovery, Information Dissemination and Route Discovery.
Initially every node starts with an empty topology table and an empty neighbor list. During Neighbor Discovery phase,
all the nodes establish and maintain the neighbourhood node relationships. During Information Dissemination phase,
link state packets are disseminated. These packets contain the neighbourhood node link information. During Route
Discovery phase, shortest route from source to destination is determined using link state packets. This is suitable for
medium traffic conditions. In highly dense area, more vehicles are connected and present in the zone. As per fisheye
routing, maintaining a link state map for more neighbouring nodes will be complex. When the number of neighbor
nodes is greater than m no. of nodes then adaptive dense zone routing protocol is used to reduce the complexity. It is a
zone based routing protocol and it is a proactive routing protocol. In this, all the vehicles maintain a routing table
which contains the neighbourhood information within that zone or the average area of the vehicle. The routing table
contains the route with minimum hop distance along with the neighbor node identity. Since adaptive dense zone
routing protocol makes use of dense zone approach based on adaptive mesh structures the complexity is very much
reduced. When the number of neighbor nodes is lesser than m no. of nodes then the adhoc on demand routing
protocol is selected. In this protocol, the link is established with the nearest node whenever there is a requirement by a
source node to transmit the data and the data is forwarded. The Fig. 2 indicates the sample highway scenario where as
Fig. 3 gives the sample urban scenario.
Fig.2. Sample Highway Scenario
IPASJ International Journal of Computer Science(IIJCS)
Web Site: http://www.ipasj.org/IIJCS/IIJCS.htm
A Publisher for Research Motivation ........ Email: editoriijcs@ipasj.org
Volume 2, Issue 6, June 2014 ISSN 2321-5992
Volume 2 Issue 6 June 2014 Page 7
Fig.3. Sample Urban Scenario
4. SIMULATION RESULTS
To validate the proposed routing methodology m is fixed as 20 for all simulations. Simulations are carried out to
calculate the packet delivery with respect to time. The number of packets delivered for proposed routing and individual
routing protocols are plotted. The number of packets delivered with respect to time for fisheye state routing and
proposed adaptive routing is given in Fig. 4. The green line indicates the proposed routing and the red line indicates
the individual protocol when they are only used. The number of packets delivered with respect to time for adaptive
dense zone routing routing and proposed adaptive routing is given in Fig. 5. The number of packets delivered with
respect to time for Adhoc on demand routing and proposed adaptive Routing is given in fig.6. Simulation results are
almost same for urban scenario and highway scenario. Here the results are obtained for urban scenario.
Fig. 4. Packet Delivery Ratio vs simulation time Fig.5. Packet Delivery Ratio vs simulation time
(Fisheye state routing and Adaptive routing) (Adaptive dense zone routing and Adaptive routing)
Packets delivered vs t Packets delivered vs t
IPASJ International Journal of Computer Science(IIJCS)
Web Site: http://www.ipasj.org/IIJCS/IIJCS.htm
A Publisher for Research Motivation ........ Email: editoriijcs@ipasj.org
Volume 2, Issue 6, June 2014 ISSN 2321-5992
Volume 2 Issue 6 June 2014 Page 8
Fig. 6. Packet Delivery Ratio vs simulation time (Adhoc on demand routing and Adaptive routing)
5. CONCLUSION
Due to the high speed of vehicles there will be rapid changes in the topology of VANET which in turn affect the packet
delivery. By selecting a suitable routing protocol packet delivery can be improved. From the results it is understood that
rather than relying on the single protocol the combined version of these three protocols that is the proposed adaptive
routing provides higher data delivery.
REFERENCES
[1] Kevin C. Lee, Uichin Lee, Mario Gerla,"Survey of Routing Protocols in Vehicular Ad Hoc Networks," Advances in
Vehicular Ad-Hoc Networks: Developments and Challenges, IGI Global, Oct, 2009.
[2] Ericson, Communication and Mobility by Cellular Advanced Radio, ComCar project, www.comcar.de, 2002.
[3] W. Franz, H. Hartenstein, and M. Mauve, Eds., Inter-Vehicle-Communications Based on Ad Hoc Networking
Principles-The Fleet Net Project. Karlshue, Germany: Universitatverlag Karlsuhe,November 2005.
[4] Festag, et. al., NoW-Network on Wheels: Project Objectives,Technology and Achievements, Proceedings of 6
th
InternationalWorkshop on Intelligent Transportations (WIT), Hamburg, Germany,March 2008.
[5] Reichardt D., Miglietta M., Moretti L., Morsink P., and Schulz W.,CarTALK 2000 safe and comfortable
driving based upon inter-vehicle-communication, in Proc. IEEE IV02.
[6] Morris R., Jannotti J., Kaashoek F., Li J., Decouto D., CarNet: A scalable ad hoc wireless network system, 9th
ACM SIGOPS European Workshop, Kolding, Denmark, Sept. 2000.
[7] Pei, G., Gerla, M., and Chen, T.-W. (2000), Fisheye State Routing: A Routing Scheme for Ad Hoc Wireless
Networks, Proc. ICC 2000, New Orleans, LA, June 2000.
[8] Perkins, C.; Belding-Royer, E.; Das, S. (July 2003)Adhoc On-Demand Distance Vector (AODV) Routing.
[9] Guangyu Pei, Mario Gerla, Tsu-Wei Chen, Fisheye State Routing in Mobile Ad Hoc Networks
nrlweb.cs.ucla.edu/publication/.../05_75
[10] Irem Nizamoglu, Sinem Coleri Ergen, Oznur Ozkasap, EpiDOL: Epidemic Density Adaptive Data Dissemination
Exploiting Opposite Lane in VANETs, springer,978-3-642-40552-5_20
Packets delivered vs t
Packets delivered vs t
You might also like
- Speakers Guidebook Text and Reference 7th Edition Ohair Test BankDocument15 pagesSpeakers Guidebook Text and Reference 7th Edition Ohair Test Bankbrendabrownipnmktbzas100% (14)
- 1 - Script Ceu Azul 2023Document21 pages1 - Script Ceu Azul 2023Indigo Graficos50% (2)
- Intelligent Decision Based Route Selection and Maintenance Approach Using AOMDV in VANETDocument9 pagesIntelligent Decision Based Route Selection and Maintenance Approach Using AOMDV in VANETIJRASETPublicationsNo ratings yet
- An Efficient Routing Mechanism For Vehicular Ad Hoc NetworksDocument4 pagesAn Efficient Routing Mechanism For Vehicular Ad Hoc NetworksEditor IJRITCCNo ratings yet
- Survey On Route Discovery Based On Congestion in Vanet (Vehicular Ad-Hoc Networks)Document3 pagesSurvey On Route Discovery Based On Congestion in Vanet (Vehicular Ad-Hoc Networks)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- S - 2 ITS: Tudy of The Effect of Velocity On End TO End Delay For V V Communication inDocument8 pagesS - 2 ITS: Tudy of The Effect of Velocity On End TO End Delay For V V Communication inijngnNo ratings yet
- Comparison and Analysis of Greedy Forwarding Using BNGF Method in Different Vehicular Traffic ScenariosDocument14 pagesComparison and Analysis of Greedy Forwarding Using BNGF Method in Different Vehicular Traffic ScenariosijngnNo ratings yet
- Routing Protocols in Vehicular Ad Hoc Networks: A Survey and Future PerspectivesDocument20 pagesRouting Protocols in Vehicular Ad Hoc Networks: A Survey and Future PerspectivesVreddy ReddyNo ratings yet
- A Novel Reliable Low-Latency Multipath Routing Scheme For Vehicular Ad Hoc NetworksDocument19 pagesA Novel Reliable Low-Latency Multipath Routing Scheme For Vehicular Ad Hoc NetworksMahabub SubhaniNo ratings yet
- Session 01 - Paper 14Document7 pagesSession 01 - Paper 14Nicholas DawsonNo ratings yet
- Increasing The Route Lifetime Stability of Lar Protocol For Vanets in Highway EnvironmentDocument10 pagesIncreasing The Route Lifetime Stability of Lar Protocol For Vanets in Highway EnvironmentnabilNo ratings yet
- Evaluation The Performance of MAODV and AODV Protocols in VANETs ModelsDocument12 pagesEvaluation The Performance of MAODV and AODV Protocols in VANETs ModelsAI Coordinator - CSC JournalsNo ratings yet
- Performance Study of Multi-Path in Vanets and Their Impact On Routing ProtocolsDocument5 pagesPerformance Study of Multi-Path in Vanets and Their Impact On Routing Protocolsashish88bhardwaj_314No ratings yet
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument8 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- Intelligent Driver Mobility Model and Traffic Pattern Generation Based Optimization of Reactive Protocols For Vehicular Ad-Hoc NetworksDocument8 pagesIntelligent Driver Mobility Model and Traffic Pattern Generation Based Optimization of Reactive Protocols For Vehicular Ad-Hoc Networksstephenlim7986No ratings yet
- Performance Analysis of AODV, DSR and ZRP Protocols in Vehicular Ad-Hoc Network Using QualnetDocument5 pagesPerformance Analysis of AODV, DSR and ZRP Protocols in Vehicular Ad-Hoc Network Using QualnetInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Effective Routing Based On Overhead ReductionDocument9 pagesEffective Routing Based On Overhead ReductionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Probabilistic Routing Using Queuing Theory For ManetsDocument15 pagesProbabilistic Routing Using Queuing Theory For ManetsJohn BergNo ratings yet
- Performances of Ad Hoc Networks Under Deterministic and Probabilistic Channel Conditions: Cases For Single Path and Multipath Routing ProtocolsDocument21 pagesPerformances of Ad Hoc Networks Under Deterministic and Probabilistic Channel Conditions: Cases For Single Path and Multipath Routing ProtocolsAIRCC - IJCNCNo ratings yet
- Performance Analysis of Traffic Type and Routing PDocument11 pagesPerformance Analysis of Traffic Type and Routing PalissonzkvNo ratings yet
- Simulation Analysis of AODV Routing Protocol of Manet Using OpnetDocument3 pagesSimulation Analysis of AODV Routing Protocol of Manet Using Opnetمحمود كريمNo ratings yet
- Performance of VANET Through Realistic Large Scale Fading ChannelsDocument6 pagesPerformance of VANET Through Realistic Large Scale Fading ChannelsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Link State RoutingDocument16 pagesLink State Routingnikpetar1No ratings yet
- Performance Evaluation of Manet Routing Protocols On The Basis of TCP Traffic PatternDocument8 pagesPerformance Evaluation of Manet Routing Protocols On The Basis of TCP Traffic PatternijitcsNo ratings yet
- Feasibility Study of DSDV and AODV Routing Protocols in Mobile Sensor NetworksDocument7 pagesFeasibility Study of DSDV and AODV Routing Protocols in Mobile Sensor NetworksSabin BhandariNo ratings yet
- Study and Analysis of Throughput, Delay and Packet Delivery Ratio in MANET For Topology Based Routing Protocols (AODV, DSR and DSDV)Document5 pagesStudy and Analysis of Throughput, Delay and Packet Delivery Ratio in MANET For Topology Based Routing Protocols (AODV, DSR and DSDV)PremKumarNo ratings yet
- NS2 Report - Analysis of AODV & DSDV Routing Protocol: Muhammad SamiDocument3 pagesNS2 Report - Analysis of AODV & DSDV Routing Protocol: Muhammad SamiSamiunnNo ratings yet
- Design and Implementation of Hybrid Routing Algorithm For VANETDocument5 pagesDesign and Implementation of Hybrid Routing Algorithm For VANETWARSE JournalsNo ratings yet
- CH111Document6 pagesCH111informatiquehageryahoo.frNo ratings yet
- Analysing The Interaction Between Mobility Model and Unipath Routing Protocols in Mobile Ad Hoc NetworksDocument7 pagesAnalysing The Interaction Between Mobility Model and Unipath Routing Protocols in Mobile Ad Hoc NetworkseditorijaiemNo ratings yet
- Literature SurveyDocument3 pagesLiterature SurveypooanajiNo ratings yet
- Aodv Protocol ThesisDocument4 pagesAodv Protocol ThesisSarah MarieNo ratings yet
- Study of Distance Vector Routing Protocols For Mobile Ad Hoc NetworksDocument8 pagesStudy of Distance Vector Routing Protocols For Mobile Ad Hoc NetworksSai SaurabNo ratings yet
- Improved Network Performance by Avoiding Attack On Routing Path Using Shortest Path RoutingDocument7 pagesImproved Network Performance by Avoiding Attack On Routing Path Using Shortest Path RoutingAnonymous Ndsvh2soNo ratings yet
- Ijcet: International Journal of Computer Engineering & Technology (Ijcet)Document9 pagesIjcet: International Journal of Computer Engineering & Technology (Ijcet)شهاب الدينNo ratings yet
- Routing Protocol For Intermittent Connected VANET by Using Real Time Traffic Information SystemDocument5 pagesRouting Protocol For Intermittent Connected VANET by Using Real Time Traffic Information SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- LAR MA NetDocument5 pagesLAR MA NetSatyaNo ratings yet
- Current Routing Strategies To Adapt The Characteristics: Prof. Ananad L.MothghareDocument2 pagesCurrent Routing Strategies To Adapt The Characteristics: Prof. Ananad L.MothghareInternational Journal of computational Engineering research (IJCER)No ratings yet
- An Efficient Passive Approach For Quality of Service Routing in ManetsDocument6 pagesAn Efficient Passive Approach For Quality of Service Routing in Manetssurendiran123No ratings yet
- Mis 2019Document16 pagesMis 2019nabilNo ratings yet
- 2013 Procedia Technology MojtabaDocument7 pages2013 Procedia Technology MojtabaMahamod IsmailNo ratings yet
- A Simulation Study of Routing Protocols For Vehicular Ad Hoc Networks Based On OPNETDocument4 pagesA Simulation Study of Routing Protocols For Vehicular Ad Hoc Networks Based On OPNETANas AliNo ratings yet
- MANET Reactive Protocols-Tutorial Review: Jahangir KhanDocument3 pagesMANET Reactive Protocols-Tutorial Review: Jahangir KhanSomsubhra DasNo ratings yet
- A Comparative Study of Broadcast Based Routing Protocols in Mobile Ad Hoc NetworksDocument6 pagesA Comparative Study of Broadcast Based Routing Protocols in Mobile Ad Hoc NetworksInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Ijcses 040303Document10 pagesIjcses 040303ijcsesNo ratings yet
- A Novel Approach To Efficient and Reliable RoutingDocument4 pagesA Novel Approach To Efficient and Reliable RoutingconwamcNo ratings yet
- Anycast Based Routing in Vehicular Adhoc Networks (VANETS) Using VanetmobisimDocument11 pagesAnycast Based Routing in Vehicular Adhoc Networks (VANETS) Using VanetmobisimhongnhNo ratings yet
- A Review of Routing Protocols in Mobile Ad Hoc NetworksDocument4 pagesA Review of Routing Protocols in Mobile Ad Hoc NetworksjamesjiangqianNo ratings yet
- 4 IjecsDocument5 pages4 IjecsPiyush ChouhanNo ratings yet
- Parametric Analysis of Mobile Ad-Hoc Network Environment: M.Shahaya Sheela, A.Sivanantha Raja and V.R.Sarma DhulipalaDocument4 pagesParametric Analysis of Mobile Ad-Hoc Network Environment: M.Shahaya Sheela, A.Sivanantha Raja and V.R.Sarma DhulipalaAdrian BorleaNo ratings yet
- VANET Routing Protocols :implementation and Analysis Using NS3 and SUMODocument6 pagesVANET Routing Protocols :implementation and Analysis Using NS3 and SUMOVelumani sNo ratings yet
- An Implementation in AODV Based On Active Route Timeout Between Sensor Nodes in Wireless Sensor NetworksDocument7 pagesAn Implementation in AODV Based On Active Route Timeout Between Sensor Nodes in Wireless Sensor NetworksMurugan SanjayNo ratings yet
- Evaluation of Various Traffic Loads in MANET With DSR Routing Protocol Through Use of OPNET SimulatorDocument9 pagesEvaluation of Various Traffic Loads in MANET With DSR Routing Protocol Through Use of OPNET SimulatorijdpsNo ratings yet
- Critical Review of Routing ProtocolsDocument13 pagesCritical Review of Routing ProtocolsconflictedNo ratings yet
- Predicting The Longest Route Lifetime As The Most Stable Route Between Two Vehicles in VANETDocument9 pagesPredicting The Longest Route Lifetime As The Most Stable Route Between Two Vehicles in VANETnabilNo ratings yet
- Almaashri 3545Document10 pagesAlmaashri 3545Hayat BokkhariNo ratings yet
- IjrsatDocument4 pagesIjrsatSrikanth ShanmukeshNo ratings yet
- Aodv ThesisDocument4 pagesAodv ThesisBrittany Brown100% (1)
- Throughput and Delay Analysis of Next-HOP Forwarding Method For Non-Linear Ehicular AD HOC NetworksDocument12 pagesThroughput and Delay Analysis of Next-HOP Forwarding Method For Non-Linear Ehicular AD HOC NetworksijansjournalNo ratings yet
- Improving Qos Using Multipath Routing Backbones in ManetDocument22 pagesImproving Qos Using Multipath Routing Backbones in ManetBalram GunasekarNo ratings yet
- 1.1 Problem Statement: It Is Sometimes NotDocument4 pages1.1 Problem Statement: It Is Sometimes Notpiyushji125No ratings yet
- Detection of Malicious Web Contents Using Machine and Deep Learning ApproachesDocument6 pagesDetection of Malicious Web Contents Using Machine and Deep Learning ApproachesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- THE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSDocument7 pagesTHE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Study of Customer Experience and Uses of Uber Cab Services in MumbaiDocument12 pagesStudy of Customer Experience and Uses of Uber Cab Services in MumbaiInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Mexican Innovation System: A System's Dynamics PerspectiveDocument12 pagesThe Mexican Innovation System: A System's Dynamics PerspectiveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Soil Stabilization of Road by Using Spent WashDocument7 pagesSoil Stabilization of Road by Using Spent WashInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Analysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyDocument6 pagesAnalysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDocument8 pagesDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Staycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityDocument10 pagesStaycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Performance of Short Transmission Line Using Mathematical MethodDocument8 pagesPerformance of Short Transmission Line Using Mathematical MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)Document10 pagesA Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Deep Learning Based Assistant For The Visually ImpairedDocument11 pagesA Deep Learning Based Assistant For The Visually ImpairedInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Swot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictDocument5 pagesSwot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Synthetic Datasets For Myocardial Infarction Based On Actual DatasetsDocument9 pagesSynthetic Datasets For Myocardial Infarction Based On Actual DatasetsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Anchoring of Inflation Expectations and Monetary Policy Transparency in IndiaDocument9 pagesAnchoring of Inflation Expectations and Monetary Policy Transparency in IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Impact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryDocument8 pagesImpact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Ijaiem 2021 01 28 6Document9 pagesIjaiem 2021 01 28 6International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationDocument13 pagesDesign and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaDocument5 pagesThe Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Potret, Esensi, Target Dan Hakikat Spiritual Quotient Dan ImplikasinyaDocument13 pagesPotret, Esensi, Target Dan Hakikat Spiritual Quotient Dan ImplikasinyaALFI ROSYIDA100% (1)
- Assignments in English Plus 7 THDocument32 pagesAssignments in English Plus 7 THam388488100% (1)
- Tait Specifications TP8100 USDocument4 pagesTait Specifications TP8100 USepitaNo ratings yet
- Noncavernous Arteriovenous Shunts Mimicking Carotid Cavernous FistulaeDocument5 pagesNoncavernous Arteriovenous Shunts Mimicking Carotid Cavernous FistulaeClarithq LengguNo ratings yet
- Placa Mãe HD7Document3 pagesPlaca Mãe HD7ALBANO2No ratings yet
- Liza ItineraryDocument23 pagesLiza Itineraryjose randyNo ratings yet
- BELBIN Team Role Summary DescriptionsDocument1 pageBELBIN Team Role Summary DescriptionsashairwaysNo ratings yet
- Textbook Mapping Modernisms Art Indigeneity Colonialism Elizabeth Harney Ebook All Chapter PDFDocument53 pagesTextbook Mapping Modernisms Art Indigeneity Colonialism Elizabeth Harney Ebook All Chapter PDFcharles.valle114100% (11)
- Ind Pharm 5th SemDocument12 pagesInd Pharm 5th Semsuyash jainNo ratings yet
- Caterpillar Engine Service Manual CT S Eng33068zDocument10 pagesCaterpillar Engine Service Manual CT S Eng33068zEliseeNo ratings yet
- Hosts and Guests - WorksheetDocument2 pagesHosts and Guests - WorksheetbeeNo ratings yet
- Reassembly: 1. Assemble Piston and Connecting RodDocument7 pagesReassembly: 1. Assemble Piston and Connecting Roddawitmesfin9No ratings yet
- Freight Chargers CalclationDocument2 pagesFreight Chargers CalclationAkama KulasekaraNo ratings yet
- Norsok Materials GuideDocument37 pagesNorsok Materials GuideYomara Samantha Hernandez LaureanoNo ratings yet
- Environmental Movements in IndiaDocument2 pagesEnvironmental Movements in IndiaAnonymous Wz2iwNeGRDNo ratings yet
- 1st Sem Mid Term PYQs 2018&2019Document20 pages1st Sem Mid Term PYQs 2018&2019Sujeet RaiNo ratings yet
- Sec eDocument2 pagesSec eVicter PaulNo ratings yet
- AGR3502 Rice Production: Food CropsDocument36 pagesAGR3502 Rice Production: Food CropsSleeping BeautyNo ratings yet
- NP181Document5 pagesNP181Psycho ScorpionNo ratings yet
- M02 MeasrmentDocument81 pagesM02 MeasrmentgmnatigizawNo ratings yet
- Man's Real Nature Is DivineDocument37 pagesMan's Real Nature Is DivineMinakshi KanuNo ratings yet
- Installation Qualification For Informatic System ExampleDocument7 pagesInstallation Qualification For Informatic System ExampleCarlos SanchezNo ratings yet
- Manual de Utilizare Sursa de Alimentare 27.6 V5 A Pulsar EN54-5A17 230 VAC50 HZ Montaj Aparent LEDDocument40 pagesManual de Utilizare Sursa de Alimentare 27.6 V5 A Pulsar EN54-5A17 230 VAC50 HZ Montaj Aparent LEDGabriel SerbanNo ratings yet
- Sigmazinc™ 102 HS: Product Data SheetDocument4 pagesSigmazinc™ 102 HS: Product Data Sheetyogeshkumar121998No ratings yet
- Integrate Pentaho With MapR Using Apache DrillDocument13 pagesIntegrate Pentaho With MapR Using Apache DrillDat TranNo ratings yet
- AUTOSAR EXP NVDataHandling 2Document52 pagesAUTOSAR EXP NVDataHandling 2afraNo ratings yet
- 2019 Colloquium Draft March 12Document33 pages2019 Colloquium Draft March 12Jessica BrummelNo ratings yet
- The Importance of TeamworkDocument8 pagesThe Importance of TeamworkBraga MihaelaNo ratings yet