Download as pdf or txt
You might also like
- Power Electronic Converters Modeling and Control PDFDocument469 pagesPower Electronic Converters Modeling and Control PDFPapeo Electricos Usach80% (15)
- Research ProposalDocument49 pagesResearch ProposalMwaniki Charles83% (6)
- Power System OperationsDocument303 pagesPower System OperationsPercy Pacara Daza100% (6)
- Project Proposal 1Document14 pagesProject Proposal 1wondi BETNo ratings yet
- Emona Signals Systems R3 0Document192 pagesEmona Signals Systems R3 0Erika AlexandraNo ratings yet
- (Advances in Industrial Control) Sandro Corsi (Auth.) - Voltage Control and Protection in Electrical Power Systems - From System Components To Wide-Area Control-Springer-Verlag London (2015)Document579 pages(Advances in Industrial Control) Sandro Corsi (Auth.) - Voltage Control and Protection in Electrical Power Systems - From System Components To Wide-Area Control-Springer-Verlag London (2015)Regis Queiroz100% (2)
- Research ProposalDocument23 pagesResearch ProposalMwaniki CharlesNo ratings yet
- Basic Electricity and Electronics for Control: Fundamentals and Applications 3rd EditionFrom EverandBasic Electricity and Electronics for Control: Fundamentals and Applications 3rd EditionRating: 4 out of 5 stars4/5 (3)
- Ultrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentFrom EverandUltrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentRating: 4.5 out of 5 stars4.5/5 (3)
- Fisher Thermo Scientific Catalogue V DearDocument72 pagesFisher Thermo Scientific Catalogue V Dearmm0987654321100% (1)
- Progress - Getting Started With Database AuditingDocument27 pagesProgress - Getting Started With Database Auditingbermark11No ratings yet
- Vibration ControlDocument392 pagesVibration ControlSchreiber_DiesesNo ratings yet
- Last Project PropDocument12 pagesLast Project Propyisakabera123No ratings yet
- SMA-Based Muscle-Like Actuation in Biologically Inspired Robots: A State of The Art ReviewDocument30 pagesSMA-Based Muscle-Like Actuation in Biologically Inspired Robots: A State of The Art ReviewWilliam H. CoralNo ratings yet
- Power Electronic Inverters and Energy ConversionDocument23 pagesPower Electronic Inverters and Energy ConversionHeinzNo ratings yet
- DH For Hydraluic CraneDocument80 pagesDH For Hydraluic CraneParthPatelNo ratings yet
- Fea Simulation For Vibration Control of Shaft System by Magnetic Piezoelectric Control MountDocument4 pagesFea Simulation For Vibration Control of Shaft System by Magnetic Piezoelectric Control MountInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Lecture Notes 2018Document111 pagesLecture Notes 2018Joel Adu-TutuNo ratings yet
- PI With Anti WindupDocument61 pagesPI With Anti Windupali jafarianNo ratings yet
- BOOK Kwak Moon Kyu - Dynamic Modeling and Active Vibration ControlDocument377 pagesBOOK Kwak Moon Kyu - Dynamic Modeling and Active Vibration ControlJulian GenovNo ratings yet
- Last Project Prop EditedDocument13 pagesLast Project Prop Editedyisakabera123No ratings yet
- Intelligent Classroom Automation System Using Pic MicrocontrollerDocument7 pagesIntelligent Classroom Automation System Using Pic MicrocontrolleresatjournalsNo ratings yet
- The Final Master ReportDocument100 pagesThe Final Master ReportCristhian CarlosNo ratings yet
- Shoureshi Smart Sensor Final Report PDFDocument30 pagesShoureshi Smart Sensor Final Report PDFJay Rameshbhai ParikhNo ratings yet
- Sistem Proteksi Transformator Gsut 150 KV Di Pt. Supreme Energy Muara LabohDocument21 pagesSistem Proteksi Transformator Gsut 150 KV Di Pt. Supreme Energy Muara LabohRahmatul AnggiNo ratings yet
- Ernst Psce 2009 TalkDocument19 pagesErnst Psce 2009 TalkadauNo ratings yet
- PDF Circadian Rhythms For Future Resilient Electronic Systems Accelerated Active Self Healing For Integrated Circuits Xinfei Guo Ebook Full ChapterDocument54 pagesPDF Circadian Rhythms For Future Resilient Electronic Systems Accelerated Active Self Healing For Integrated Circuits Xinfei Guo Ebook Full Chaptermark.killeen229100% (3)
- 1 Mechatronics - Control - DevicesDocument40 pages1 Mechatronics - Control - DevicesAdrian GCNo ratings yet
- 10 1 1 66 8175 PDFDocument79 pages10 1 1 66 8175 PDFVlad StolyarovNo ratings yet
- Introduction To Electromagnetic Transient Analysis of Power SystemsDocument8 pagesIntroduction To Electromagnetic Transient Analysis of Power Systemsअंकित अरोड़ाNo ratings yet
- HV Protection Manual 0511Document188 pagesHV Protection Manual 0511Sudhir JoshiNo ratings yet
- Relay Setting Guide GEDocument40 pagesRelay Setting Guide GENoel Gregorio SantosNo ratings yet
- Li MingfengDocument178 pagesLi MingfengNimalanNo ratings yet
- Estimation of Electromechanical Modes in Power Systems Using Synchronized Phasor Measurements and Applications For Control of Inter-Area OscillationsDocument32 pagesEstimation of Electromechanical Modes in Power Systems Using Synchronized Phasor Measurements and Applications For Control of Inter-Area OscillationsRajesh GangwarNo ratings yet
- Embedded Mechatronic Systems Volume 2 Analysis of Failures Modeling Simulation and Optimization 2Nd Edition Abdelkhalak El Hami Full ChapterDocument52 pagesEmbedded Mechatronic Systems Volume 2 Analysis of Failures Modeling Simulation and Optimization 2Nd Edition Abdelkhalak El Hami Full Chapterangelina.cline120100% (6)
- Ariola-Pironti2016 Book MagneticControlOfTokamakPlasmaDocument208 pagesAriola-Pironti2016 Book MagneticControlOfTokamakPlasmaVICENTE VILLAVERDE MUÑOZNo ratings yet
- Advanced Control of Piezoelectric Micro - Nano-Positioning Systems (PDFDrive)Document266 pagesAdvanced Control of Piezoelectric Micro - Nano-Positioning Systems (PDFDrive)Su tzung INo ratings yet
- (Download PDF) Modern Maximum Power Point Tracking Techniques For Photovoltaic Energy Systems Ali M Eltamaly Online Ebook All Chapter PDFDocument42 pages(Download PDF) Modern Maximum Power Point Tracking Techniques For Photovoltaic Energy Systems Ali M Eltamaly Online Ebook All Chapter PDFotis.brock892100% (18)
- Power Quality Disturbances and Protective Relays On Transmission LinesDocument6 pagesPower Quality Disturbances and Protective Relays On Transmission Linessurendiran123No ratings yet
- ElectroPneumatics TextbookDocument224 pagesElectroPneumatics TextbookLoforte Salomão Rapoio100% (1)
- PS Stability PrivateDocument6 pagesPS Stability PrivatecdkNo ratings yet
- Chapter 1 - Introduction To Automation SystemDocument53 pagesChapter 1 - Introduction To Automation SystemZaimi ZamaludinNo ratings yet
- Multiple Power Domains (MS Thesis Ivar Håkon Lysfjord)Document58 pagesMultiple Power Domains (MS Thesis Ivar Håkon Lysfjord)yanivscribdNo ratings yet
- Lee 2000Document8 pagesLee 2000Robert steveNo ratings yet
- GE Multilin Relay Selection GuideDocument40 pagesGE Multilin Relay Selection GuideSaravanan Natarajan100% (1)
- Power System Damping: Structural Aspects of Controlling Active PowerDocument196 pagesPower System Damping: Structural Aspects of Controlling Active PowerramsesiNo ratings yet
- Final Solar ReportDocument13 pagesFinal Solar Reportاسعد الماوريNo ratings yet
- Embedded System PaperDocument4 pagesEmbedded System PaperTiffany PriceNo ratings yet
- Practical Control of Electric Machines: Model-Based Design and SimulationFrom EverandPractical Control of Electric Machines: Model-Based Design and SimulationNo ratings yet
- Vibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingFrom EverandVibrations of Power Plant Machines: A Guide for Recognition of Problems and TroubleshootingNo ratings yet
- Modern Anti-windup Synthesis: Control Augmentation for Actuator SaturationFrom EverandModern Anti-windup Synthesis: Control Augmentation for Actuator SaturationRating: 5 out of 5 stars5/5 (1)
- Use of Voltage Stability Assessment and Transient Stability Assessment Tools in Grid OperationsFrom EverandUse of Voltage Stability Assessment and Transient Stability Assessment Tools in Grid OperationsSarma (NDR) NuthalapatiNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Process Control for Sheet-Metal Stamping: Process Modeling, Controller Design and Shop-Floor ImplementationFrom EverandProcess Control for Sheet-Metal Stamping: Process Modeling, Controller Design and Shop-Floor ImplementationNo ratings yet
- Practical Power Electronics: Applications, Experiments and AnimationsFrom EverandPractical Power Electronics: Applications, Experiments and AnimationsNo ratings yet
- Modeling and Simulation of Thermal Power Plants with ThermoSysPro: A Theoretical Introduction and a Practical GuideFrom EverandModeling and Simulation of Thermal Power Plants with ThermoSysPro: A Theoretical Introduction and a Practical GuideNo ratings yet
- LNX 6514DS VTMDocument2 pagesLNX 6514DS VTMLucas GonçalvesNo ratings yet
- CS NoteDocument51 pagesCS Notesmita satpathyNo ratings yet
- Easa Part66 Module 01 New Part 2Document11 pagesEasa Part66 Module 01 New Part 2el farissi farisNo ratings yet
- Math Kangaroo Competition: Test PaperDocument10 pagesMath Kangaroo Competition: Test PaperKhaing Phyu0% (1)
- 7233.04 Urban Vertical Polarized: Powerwave Single Band AntennasDocument1 page7233.04 Urban Vertical Polarized: Powerwave Single Band AntennasyacasiestaNo ratings yet
- How To Trade Pullbacks With 5 Key Technical Tools.: Fxtechstrategy TeamDocument10 pagesHow To Trade Pullbacks With 5 Key Technical Tools.: Fxtechstrategy TeamkanapunditNo ratings yet
- HUAWEI BTS3900 Hardware Structure and Principle-200903-IsSUE1.0-BDocument93 pagesHUAWEI BTS3900 Hardware Structure and Principle-200903-IsSUE1.0-Bkashf415100% (4)
- Hydraulics ReviewerDocument3 pagesHydraulics ReviewerRalph CastilloNo ratings yet
- Manual EP200 enDocument42 pagesManual EP200 enJose AguirreNo ratings yet
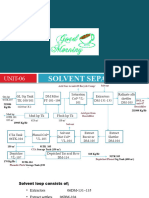
- Solvent Separation UNIT-06 - GOODDocument17 pagesSolvent Separation UNIT-06 - GOODAamir HasanNo ratings yet
- Anonymous and Traceable Group Data Sharing in Cloud ComputingDocument84 pagesAnonymous and Traceable Group Data Sharing in Cloud Computingvikas guptaNo ratings yet
- Software TestingDocument31 pagesSoftware TestingPon KarthikeyanNo ratings yet
- Competitive Programming Network - 2nd ActivityDocument15 pagesCompetitive Programming Network - 2nd ActivityMarice Sinisterra Institucion EducativaNo ratings yet
- 3V FM Transmitter CircuitDocument6 pages3V FM Transmitter CircuitMahmood AhmedNo ratings yet
- LLC3kW GUI ManualDocument8 pagesLLC3kW GUI Manualreferenceref31No ratings yet
- Experiment 1 Control ValvesDocument26 pagesExperiment 1 Control Valvesabu hassan100% (1)
- One Dimensional FlowDocument11 pagesOne Dimensional FlowmechgokulNo ratings yet
- 2009 Yzf r1Document92 pages2009 Yzf r1samNo ratings yet
- Commscope 6 PDFDocument2 pagesCommscope 6 PDFVũ VũNo ratings yet
- Design Process in RefrigeratorDocument8 pagesDesign Process in RefrigeratorAjinkya MoreNo ratings yet
- 313-317 DEPTO One KDocument5 pages313-317 DEPTO One KPriyadarshini KrishnaswamyNo ratings yet
- Taxonomy v101Document67 pagesTaxonomy v101Angela BernalNo ratings yet
- Statistics and Probability (Quarter Iii, Week 1) Random Variables & Probability DistributionsDocument6 pagesStatistics and Probability (Quarter Iii, Week 1) Random Variables & Probability DistributionsJacqueline Trinidad DeeNo ratings yet
- High Impedance Fault Detection Using Multi Domain Feature With Artificial Neural NetworkDocument15 pagesHigh Impedance Fault Detection Using Multi Domain Feature With Artificial Neural NetworkANKAN CHANDRANo ratings yet
- 4. VLF Hipot Tester-User Manual(按键款)Document9 pages4. VLF Hipot Tester-User Manual(按键款)Mạnh Nguyễn VănNo ratings yet
- Nikola Tesla QuotesDocument39 pagesNikola Tesla Quotesqwertz_m100% (1)
- RMS ErrorDocument2 pagesRMS ErrorGopala RaoNo ratings yet
- Grammar - Truth About English Grammar (Pullum - Must Read) PDFDocument20 pagesGrammar - Truth About English Grammar (Pullum - Must Read) PDFZahid HossainNo ratings yet