Download as pdf or txt
You might also like
- Being Happy - Andrew MatthewsDocument242 pagesBeing Happy - Andrew MatthewsLioe Stanley100% (4)
- Interchangeability PDFDocument16 pagesInterchangeability PDFMaulikNo ratings yet
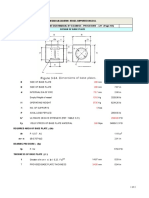
- Leg Support Calculation PDFDocument2 pagesLeg Support Calculation PDFSanjay MoreNo ratings yet
- Christu Jyothi Institute of Technology & Science YeshwanthapurDocument46 pagesChristu Jyothi Institute of Technology & Science YeshwanthapurMani MannNo ratings yet
- Escodisc: AvailabilitiesDocument10 pagesEscodisc: AvailabilitiesEmerson IpialesNo ratings yet
- H60 STSH 2011 PDFDocument2 pagesH60 STSH 2011 PDFthritaNo ratings yet
- Optimization of A Highly Stressed Radial Compressor Impeller OptislangDocument42 pagesOptimization of A Highly Stressed Radial Compressor Impeller OptislangticklinNo ratings yet
- EX18195003 - 001-6901-01 Rev 0 OBSDocument2 pagesEX18195003 - 001-6901-01 Rev 0 OBSRichardNo ratings yet
- 2 1 01 Auxiliary Gear BoxDocument30 pages2 1 01 Auxiliary Gear BoxHeryanto SyamNo ratings yet
- Analysis of A Compessor Rotor Using Finite Element AnalysisDocument21 pagesAnalysis of A Compessor Rotor Using Finite Element Analysisinam vfNo ratings yet
- Turbocare Gas Turbine Symposium 18/19 April 2005 Dallas TXDocument19 pagesTurbocare Gas Turbine Symposium 18/19 April 2005 Dallas TXteedee1No ratings yet
- Sellos de LaberintoDocument320 pagesSellos de LaberintoJavierNo ratings yet
- Gas Turbine Heat Transfer Ten Remaining Hot Gas Path ChallengesDocument9 pagesGas Turbine Heat Transfer Ten Remaining Hot Gas Path Challengeseankibo100% (2)
- Propulsion System: Faculty of Aeronautical Engineering 1Document106 pagesPropulsion System: Faculty of Aeronautical Engineering 1Nandha Kumar100% (1)
- MODULE 3 Cascade Theory, Axial Flow Turbine and Propulsion System PDFDocument43 pagesMODULE 3 Cascade Theory, Axial Flow Turbine and Propulsion System PDFantonNo ratings yet
- Axial Flow Compressor 2Document11 pagesAxial Flow Compressor 2ram kishor singh100% (1)
- '' Turbine - Nozzle - Diffuser - Compressor ''Document15 pages'' Turbine - Nozzle - Diffuser - Compressor ''Eng-Ahmed Salama100% (1)
- Kurzke Turbine Map ExtensionpdfDocument14 pagesKurzke Turbine Map ExtensionpdfzzzNo ratings yet
- Study of Manufacturing of Gas TurbineDocument33 pagesStudy of Manufacturing of Gas TurbineSalman MohammedNo ratings yet
- Environmental Considerations For Gas Turbine Clean Energy SystemsDocument45 pagesEnvironmental Considerations For Gas Turbine Clean Energy SystemsMehulkumar PatelNo ratings yet
- Heat Transfer: (Meng 3121)Document52 pagesHeat Transfer: (Meng 3121)HASSAN ARSHADNo ratings yet
- Introduction and Overview: Fundamentals of Thermal-Fluid SciencesDocument23 pagesIntroduction and Overview: Fundamentals of Thermal-Fluid SciencesJoelle KharratNo ratings yet
- GT2019 90177Document11 pagesGT2019 90177Hiwa Khaledi100% (1)
- PGI2003 FastStartup&DesignForCyclingDocument20 pagesPGI2003 FastStartup&DesignForCyclingscarrion80100% (1)
- Performance of Industrial GasturbinesDocument28 pagesPerformance of Industrial Gasturbinessomporn duangbuntaoNo ratings yet
- The Modernization of A 1965, MS New Life For An Old 5001, Gas Turbine: UnitDocument8 pagesThe Modernization of A 1965, MS New Life For An Old 5001, Gas Turbine: UnitRozy AlriadiNo ratings yet
- Com Bust orDocument9 pagesCom Bust orDanishAmanNo ratings yet
- Humidified Gas Turbines, by EderDocument66 pagesHumidified Gas Turbines, by EderDomingo Pinto100% (1)
- CH 07Document60 pagesCH 07Lucais KwonNo ratings yet
- Development of Gas Turbine Combustors For Fuel Flexibility 2 PDFDocument31 pagesDevelopment of Gas Turbine Combustors For Fuel Flexibility 2 PDFJohn Kelly100% (2)
- Turbinas Franco Tossi FTM GeneraleDocument55 pagesTurbinas Franco Tossi FTM GeneralePedro Victor Cobeñas CajusolNo ratings yet
- CFX Turbosystem 18.2 WS10 TG Centrif Compr SplitterDocument19 pagesCFX Turbosystem 18.2 WS10 TG Centrif Compr SplitterSai Santhosh ManepallyNo ratings yet
- Lava Final ReportDocument69 pagesLava Final ReportUma MaheshNo ratings yet
- Compressor Brochure A4 - SpreadsDocument27 pagesCompressor Brochure A4 - SpreadsIwan AbdurahmanNo ratings yet
- GEA18457ADocument20 pagesGEA18457AEdGouramiNo ratings yet
- Introduction To Off Design SimulationsDocument26 pagesIntroduction To Off Design SimulationsHalil İbrahim KüplüNo ratings yet
- Highlights of Roy Smith's Career at General Electric: C. C. KochDocument5 pagesHighlights of Roy Smith's Career at General Electric: C. C. KochupsasaNo ratings yet
- Compressor Modeling With Inlet DistortionDocument25 pagesCompressor Modeling With Inlet Distortionsainath_84No ratings yet
- Man Diesel Gas Turbines PDFDocument6 pagesMan Diesel Gas Turbines PDFnebojsabraticNo ratings yet
- WB Brush Seals Labyrinth - A4Document2 pagesWB Brush Seals Labyrinth - A4triplbingaziNo ratings yet
- Air SystemDocument12 pagesAir Systemmahmouddiaa554No ratings yet
- WRViT580 Product-Spec-Sheet v3B LRDocument1 pageWRViT580 Product-Spec-Sheet v3B LRLuis ReyesNo ratings yet
- Gas Turbine CombustionDocument38 pagesGas Turbine CombustionSiva Subramaniyan100% (2)
- Introduction of Gas Turbine Air Intake Cooling SystemDocument12 pagesIntroduction of Gas Turbine Air Intake Cooling SystemAndry Kurnia100% (1)
- GT Fuel Nozzle RefurbishmentDocument3 pagesGT Fuel Nozzle Refurbishmentnabil160874No ratings yet
- SulzerDocument32 pagesSulzerYeti Candra Dwi AnggrainiNo ratings yet
- E&M Combustion Presentation EnglishDocument24 pagesE&M Combustion Presentation EnglishGurcharan Singh100% (1)
- Axial Comp On OffDocument4 pagesAxial Comp On OffMohamed OmarNo ratings yet
- Turbines 1Document64 pagesTurbines 1deepak2755No ratings yet
- Auto Conference Turbochargers 2012 Holmes Hutchinson1 PDFDocument86 pagesAuto Conference Turbochargers 2012 Holmes Hutchinson1 PDFashwynvinay_90182279No ratings yet
- Introduction To CombustionDocument21 pagesIntroduction To CombustionAravindhan RameshNo ratings yet
- Ar001Document124 pagesAr001Sriram ChNo ratings yet
- Asme GT2005-68799 PDFDocument9 pagesAsme GT2005-68799 PDFJeeEianYannNo ratings yet
- Turbine Off-Frequency Operation: GE Power SystemsDocument4 pagesTurbine Off-Frequency Operation: GE Power Systemskcirrenwod100% (1)
- Advanced (Gas) Turbine System - Conceptual Design (Final RPT) - ABB (2000)Document319 pagesAdvanced (Gas) Turbine System - Conceptual Design (Final RPT) - ABB (2000)B Bala Venkata GaneshNo ratings yet
- KBE Approach To Automotive StructureDocument10 pagesKBE Approach To Automotive StructureuratmerihNo ratings yet
- A Knowledge-Based Master Modeling Approach To System Analysis and DesignDocument10 pagesA Knowledge-Based Master Modeling Approach To System Analysis and DesignHeribertoNo ratings yet
- CAD-centric Creation and Optimization of A Gas Turbine Flowpath Module With Multiple ParameterizationsDocument10 pagesCAD-centric Creation and Optimization of A Gas Turbine Flowpath Module With Multiple ParameterizationsKomal KumarNo ratings yet
- Two Dimensional Airfoil Optimisation Using CFD in A Grid Computing EnvironmentDocument8 pagesTwo Dimensional Airfoil Optimisation Using CFD in A Grid Computing Environmentananth9660No ratings yet
- CAD-Based Parametric Cross-Section Designer For Gas Turbine Engine MDO ApplicationsDocument10 pagesCAD-Based Parametric Cross-Section Designer For Gas Turbine Engine MDO ApplicationsValiyakattel NilsNo ratings yet
- The Application of Pro Engineer in CADCAMDocument9 pagesThe Application of Pro Engineer in CADCAMHafiezul HassanNo ratings yet
- Geometric Modeling: Exploring Geometric Modeling in Computer VisionFrom EverandGeometric Modeling: Exploring Geometric Modeling in Computer VisionNo ratings yet
- Analytic Solutions For Tapered Column Buckling PDFDocument6 pagesAnalytic Solutions For Tapered Column Buckling PDFshilton1989No ratings yet
- RPM To Linear Velocity Calculator - EndMemoDocument1 pageRPM To Linear Velocity Calculator - EndMemoshilton1989No ratings yet
- STEP Files - ProcedureDocument1 pageSTEP Files - Procedureshilton1989No ratings yet
- 1Document9 pages1shilton1989No ratings yet
- Goyen HardwareDocument3 pagesGoyen Hardwareshilton1989No ratings yet
- Preface: John Moalli Menlo Park. CaliforniaDocument1 pagePreface: John Moalli Menlo Park. Californiashilton1989No ratings yet
- OF Of: of P. P. 2091, An of P. On On ofDocument5 pagesOF Of: of P. P. 2091, An of P. On On ofshilton1989No ratings yet
- T A B L E 23O.-Characterlstlcs A Number of Plastics'6Document2 pagesT A B L E 23O.-Characterlstlcs A Number of Plastics'6shilton1989No ratings yet
- Document Change Notice DCN Number 5070: Old Revision New Revision Logistics Review (Y/N)Document1 pageDocument Change Notice DCN Number 5070: Old Revision New Revision Logistics Review (Y/N)shilton1989No ratings yet
- Document Change Notice DCN Number 5098: Old Revision New Revision Logistics Review (Y/N)Document1 pageDocument Change Notice DCN Number 5098: Old Revision New Revision Logistics Review (Y/N)shilton1989No ratings yet
- S900 Inverter User Manualv1.5 PDFDocument86 pagesS900 Inverter User Manualv1.5 PDFOmar ShadyNo ratings yet
- Scavenger Hunt 2019Document2 pagesScavenger Hunt 2019Rahul AdhikariNo ratings yet
- ToR For Fiberglass Biogas Plants Installation - EOI PDFDocument4 pagesToR For Fiberglass Biogas Plants Installation - EOI PDFmy09No ratings yet
- ASTM GradesDocument4 pagesASTM GradesSaurabh MundheNo ratings yet
- OHara PDFDocument17 pagesOHara PDFTomás HidalgoNo ratings yet
- The Evolution of Video Streaming and Digital Content DeliveryDocument8 pagesThe Evolution of Video Streaming and Digital Content DeliveryBrookings InstitutionNo ratings yet
- CESCCommunityProjectPlan Brgy - MacarioDaconDocument6 pagesCESCCommunityProjectPlan Brgy - MacarioDaconKennedy BalmoriNo ratings yet
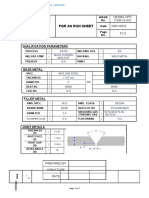
- PQR As Run SheetDocument2 pagesPQR As Run SheetAhmed ElsharkawNo ratings yet
- MGje 6 Fix GX PK Yp RBJ LBRDocument9 pagesMGje 6 Fix GX PK Yp RBJ LBRBANOTH KUMARNo ratings yet
- FlapDocument100 pagesFlapRicha Agrawal100% (2)
- LECLANCHE Cell Datasheet GL60 GNMC 60ahDocument2 pagesLECLANCHE Cell Datasheet GL60 GNMC 60ahChaitanyaNo ratings yet
- Research Progress of The Arti Ficial Intelligence Application in Wastewater Treatment During 2012 - 2022: A Bibliometric AnalysisDocument17 pagesResearch Progress of The Arti Ficial Intelligence Application in Wastewater Treatment During 2012 - 2022: A Bibliometric AnalysisjinxiaohuibabaNo ratings yet
- Ciclo Di Verniciatura: Proprieta' Tecniche Vedi Schede Tecniche AllegateDocument1 pageCiclo Di Verniciatura: Proprieta' Tecniche Vedi Schede Tecniche AllegateMaffone NumerounoNo ratings yet
- Biology Investigatory Project: Malaria: Its Effects and CausesDocument17 pagesBiology Investigatory Project: Malaria: Its Effects and CausesRishi KeshavNo ratings yet
- Gear Trains: 8.1. Angular Velocity RatioDocument16 pagesGear Trains: 8.1. Angular Velocity RatioaddisudagneNo ratings yet
- MEP MyanmarDocument27 pagesMEP Myanmarempty87No ratings yet
- Catalogo ColonneDocument140 pagesCatalogo Colonneapi-18378576No ratings yet
- CR Unit 1 &11 (Part A &B)Document12 pagesCR Unit 1 &11 (Part A &B)durai muruganNo ratings yet
- Background of Philippine Art and Literature in Romantic RealismDocument2 pagesBackground of Philippine Art and Literature in Romantic RealismRaldz CoyocaNo ratings yet
- Da0bl7mb6d0 Rev DDocument44 pagesDa0bl7mb6d0 Rev DFerreira da CunhaNo ratings yet
- Open-Circuit Time Constant Analysis: Asas As Hs K Bsbs BsDocument24 pagesOpen-Circuit Time Constant Analysis: Asas As Hs K Bsbs BsSHAIK MUSTHAFANo ratings yet
- Urinalysis - Fatin AinaDocument14 pagesUrinalysis - Fatin AinaAl- ImanuddinNo ratings yet
- The Efects of Tree Characteristics On Rainfall Interception in UrbanDocument8 pagesThe Efects of Tree Characteristics On Rainfall Interception in UrbanGuilherme SantanaNo ratings yet
- Spider-81 Hardware Spec 7.7Document7 pagesSpider-81 Hardware Spec 7.7KonradNo ratings yet
- As 1729-1994 Timber - Handles For ToolsDocument7 pagesAs 1729-1994 Timber - Handles For ToolsSAI Global - APACNo ratings yet
- Neisseria Gonorrhoeae and Neisseria MeningitidesDocument3 pagesNeisseria Gonorrhoeae and Neisseria MeningitidesAmador Gielas0% (1)
- Bigbang PDFDocument772 pagesBigbang PDFLeanne Haddock100% (1)
- 11 Chemistry Module 2Document19 pages11 Chemistry Module 2SpongeBob SquarePants Fidget ToysNo ratings yet