Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.
com
Volume 3, Issue 4, July-August 2014 ISSN 2278-6856
Volume 3 Issue 4 July-August, 2014 Page 44
Abstract- The purpose of this study is to control the speed of
3-Phase Induction Motor with Artificial Neural Network
(ANN) controller using MATLAB application. The Artificial
Neural Network Controller will be design and must be tune, so
the comparison between simulation result and experimental
result can be made. The scopes includes the simulation and
modelling of 3-Phase Induction Motor, implementation of
Artificial Neural Network Controller into actual 3-Phase
Induction Motor and comparison of MATLAB simulation
result with the experimental result. This research was about
introducing the new ability of in estimating speed and
controlling the 3-phase Induction Motor. In this project, ANN
Controller will be used to control the speed of 3-Phase
Induction Motor. The ANN Controller will be programmed to
control the speed of 3-Phase Induction Motor at certain speed
level. Direct Torque Control (DTC) is one of the latest
technique to control the speed of motor, in this paper, the
control technique of DTC is based on when load changes then
inverter switch position are changed and supply to the motor is
changed, in this paper Proportional Integral (PI), Neural
Network (NN) controller and Adaptive motor model is designed
this is the heart of the DTC, as we know that DTC doesnt
require any feedback and sensors to measure. The NN
structure is to be implemented by input output (nonlinear)
mapping models and is constructed with input, output and
hidden layers of sigmoid activation functions. It has been
introduced as a possible solution to the real multivariate
interpolation problem. To improve the performance of DTC
with the modern technique using NN approach is
implemented, and performance of DTC with PI controller and
NN controller is done, hence, the NN approach shows the
better performance than conventional PI controller.
Keywords-- direct torque control (DTC), induction motor,
artificial neural network (ANN), switching table, SVM
inverter, Backpropagation
1. INTRODUCTION
Induction motor drives controlled by Field Oriented
control (FOC) have been till now employed in high
performance industrial applications, has achieved a quick
torque response, and has been applied in various industrial
applications instead of dc motors. It permit independent
control of the torque and flux by decoupling the stator
current into two orthogonal components FOC, however, is
very sensitive to flux, which is mainly affected by
parameter variations. It depends on accurate parameter
identification to achieve the expected performance. During
the last decade a new control method called DTC (Direct
Torque Control) has been developed for
electricamachines.TC principles were first introduced by
Depenbrock and Takahashi. In this method [1], Stator
voltage vectors is selected according to the differences
between the reference and actual torque and stator flux
linkage. The DTC method is characterised by its simple
implementation and a fast dynamic response. Furthermore,
the inverter is directly controlled by the algorithm, i.e. a
modulation technique for the inverter is not needed.
However if the control is implemented on a digital system
(which can be considered as a standard nowadays), the
actual values of flux and torque could cross their
boundaries too far. The main advantages of DTC are
absence of coordinate transformation and current
regulator; absence of separate voltage modulation block,
Common disadvantages of conventional DTC are high
torque ripple and slow transient response to the step
changes in torque during start-up. For that reason the
application of artificial neural network attracts the
attention of many scientists from all over the world. The
reason for this trend is the many advantages which the
architectures of ANN have over traditional algorithmic
methods [1].Among the advantages of ANN are the ease of
training and generalization, simple architecture, possibility
of approximating nonlinear functions, insensitivity to the
distortion of the network, and inexact input data. In this
paper we present the evaluation of flux and torque using
the three stator currents is the voltage of input inverter,
and artificial neural network has been devised having as
inputs the torque error, the stator flux error and the
position of the stator flux in which it lies, and as output the
voltage space vector to be generate by the inverter. The
ANN then replaces the switching table. The theoretical
Principle, numerical simulation procedures and the results
of these methods are discussed and compared with
conventional DTC [1].
2. DIRECT TORQUE CONTROL WITH
TWO-LEVEL INVERTER
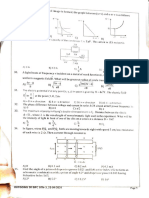
Fig. 1 shows the schematic of The basic functional blocks
used to implement the DTC of induction motor drive. A
voltage source inverter (VSI) supplies the motor and it is
possible to control directly the stator flux and the
electromagnetic torque by the selection of optimum
inverter switching modes [1]-[4].
DIRECT TORQUE CONTROL FOR INDUCTION MOTOR
USING INTELLIGENT ARTIFICIAL NEURAL NETWORK TECHNIQUE
Devender Kumar, Ishan Thakur, Kanika Gupta
1,2,3
Electrical Department, Baddi University,India
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 3, Issue 4, July-August 2014 ISSN 2278-6856
Volume 3 Issue 4 July-August, 2014 Page 45
Fig 1: Figure 1. Basic direct torque control scheme for AC
motor drives
3. VECTOR MODEL OF INVERTER
OUTPUT VOLTAGE
In the PWM voltage source inverters, considering the
combinations of the states of switching functions inverter
switching state functions (C1,C2,C3) which can take either
1 or 0, the voltage vector becomes[7][8][9]:
(1)
Eight switching combinations can be taken according to
the above relationship: two zero voltage vectors and six
non-zero voltage vectors show by Fig.2 [1][2].
Fig 2: Partition of the d q plane into 6 angular sectors
4. STATOR FLUX AND TORQUE
ESTIMATION
The components of the current (Is , Is , and stator
voltage (Vs , Vs are obtained by the application of the
transformation given by (2) and (3) :.
(2)
(3)
The components of the stator flux ( s , s given by (4).
. (4)
The stator flux linkage phase is given by (5).
(5)
The electromagnetic couple be obtained starting from the
estimated sizes of flux ( , ) and calculated sizes of
the current ( , )
(6)
The stator resistance Rs can be assumed constant during a
large number of converter switching periods Te. The
voltage vector applied to the induction motor remains also
constant one period Te. Therefore, resolving first equation
of system leads to:
(7)
(8)
In equation (8); stands for the initial stator flux
condition. This equation shows that when the term RsIs
can be neglected, (in high speed operating condition for
example), the extremity of stator flux vector Vs.
Furthermore, the instantaneous flux speed is only governed
by voltage vector amplitude .
In fact, we have the following Fig.3 Established
for the case Vs =V3.
Fig 3: An example for flux deviation
Therefore, by adequate voltage vector selection we can
increase or decrease the stator flux amplitude and phase to
obtain the required performances. The deviation obtained
at the end of the switching period Te can be approached by
the first order Taylor Seri as below. The radial component
(component of flux) of the vector of tension acts on the
amplitude of the vector flux and its tangential component
(component of the torque) on the position of the vector
flux. By choosing a suitable sequence of the vectors of
tension, one can force the end of the vector flux to follow a
desired trajectory. To function with a module of practically
constant flux s, it is enough to choose an almost circular
trajectory for the end of the vector flux. That is not
possible that if the period of control is very weak for you in
front of the period of rotation of flux.
5. SWITCHING TABLE
When flux is in zone I, the vectors Vi+1 or Vi-1 are
selected to increase the amplitude of flux, and Vi+2 or Vi-
2 to decrease it. What shows that the choice of the vector
tension depends on the sign of the error of flux,
independently of its amplitude. This explains why the exit
of the corrector of flux can be a Boolean variable. One
adds a band of hysteresis around zero to avoid useless
commutations when the error of flux is very small. Indeed,
with this type of corrector inspite of his simplicity, one can
easily control and maintain the end of the vector flux, in a
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 3, Issue 4, July-August 2014 ISSN 2278-6856
Volume 3 Issue 4 July-August, 2014 Page 46
circular ring. The switching table proposed by Takahashi,
as given by
Table1
6. DTC BASED NEURAL NETWORK
Principles of Artificial Neural Networks
Artificial neural networks use a dense interconnection of
computing nodes toapproximate nonlinear functions .Each
node constitutes a neuron and performs themultiplication
of its input signals by constant weights, sums up the results
and maps the sum to a nonlinear activation function g; the
result is then transferred to its output. A feed forward ANN
is organized in layers: an input layer, one or morehidden
layers and an output layer. A MLP consists of an input
layer, several hidden layers, and an output layer. Node i,
also called aneuron, in a MLP network is shown in Fig.4.
It includes a summer and a nonlinear activation function g
[1],[10],[13].
Fig 4.:A multilayer perceptron network with one hidden
Layer.
The inputs , k = 1...K to the neuron are multiplied by
weights and summed up together with the constant
bias term . The resulting I n is the input to the activation
function g. The activation function was originally chosen
to be a relay function, but for mathematical convenience a
hyperbolic tangent (tanh) or a sigmoid function are most
commonly used.
7. SIMULATION MODEL AND
STRUCTURE OF DTC SYSTEM BASED
ANN
The ANN is trained by a learning algorithm which
performs the adaptation of weights of the network
iteratively until the error between target vectors and the
output of the ANN is less than an error goal. The most
popular learning algorithm for multilayer networks is the
back propagation algorithm and its variants. The latter is
Implemented by many ANN software packages such as the
neural network toolbox from MATLAB.In the case
presented in this paper the DTC control strategy shown on
table I has been implemented. Neural network has been
devised having as inputs the torque error, the stator flux
error and the position of the stator flux, and as output the
voltage space vector to be generate by the inverter. The
ANN block then replaces the switching table selector block
of Fig.5.
Fig. 5. Direct Torque Control with Neural network
Applied
Creating a Simulink model for the motor of desired
specification operated by a programmable voltage source.
For this purpose we will use the Matlab version 7.10.0.499
(R2010a) [23].
The motor specification that we have chosen is
5HP, 460Volts, 60Hz, 1750 RPM and reference
we have chosen is stationary.
The Specification of the Programmable voltage
source is 460V, 60Hz, with initially zero phase.
The speed value initially applied to the motor is
200 rpm and step signal from 100 rpm to 200
rpm. The figure below shows the Simulink model
of the 3-phase IM connected to the DTC block
which is given the specified supply, speed,
electromagnetic torque, stator current_a/b/c
response connected to the waveform visualization
(scope).
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 3, Issue 4, July-August 2014 ISSN 2278-6856
Volume 3 Issue 4 July-August, 2014 Page 47
Fig. 6. DTC Control application in controlling the 3-phase
induction motor
Fig. 7. Detailed Simulink model of DTC
We have designed a neural network and trained it so that it
can replace the switching table to get the desired response.
Network formed is feed forward with one input, one
hidden and one output layer. The training is done using
Levenberg Marquardt Back-propagation Algorithm with
30 neurons through nftool in Matlab [10]. Neural network
for DTC is created by following steps-
For this we have to create the inputs and outputs
.for the inputs we have the switching table as
Table 3. The Expanded switching table of DTC
Input X is a [3 X 24] matrix. In which 1st row is for flux
error values , 2nd row is for torque error values and 3rd
row is for flux angle sector whereas each row contains 24
values as stated above in proper correspondence .In this we
have 24 samples set we have to create more samples. So
for that we have to increase the no of samples in order to
do that Horzcat function of matlab will be used.
X1=horzcat(X,X);This will create 48 samples. Now further
applying horzcat function as X2=horzcat(X1,X1);This will
create 96 samples. Now further applying the function
again X3=horzcat(X2,X2);This will create 192 samples.
Now this will give [3X192] dimension matrix which
means 192 samples in the form of column vectors with 3
values in each. Output Y is a [6 X 24] matrix. In this each
of this column represents a output vector i.e
V1/V2/V3/V4/V5/V6 and each of these vectors are
represented by the six bit binary code as stated below. So
the neural network will gives its output in the form of these
6 bits for the specified vector angle output.
In this we have results of 24 samples respectively. As we
have created 192 samples. So for that we have to take care
of the result in the same quantity in order to do that
Horzcat function of matlab will be used.
Y1=horzcat(Y,Y);
This will create 48 samples result. Now further applying
horzcat function as
Y2=horzcat(Y1,Y1);
This will create 96 samples result. Now further applying
the function again
Y3=horzcat(Y2,Y2);
This will create 192 samples result. Now this will give
[6X192] dimension matrix which means 192 samples
result in the form of 6 binary value (either 0 or 1) in each.
Now we will design a neural network and train it as we
have 192 input samples and their respective results.
X3 input,Y3 output.For that we have nftool in matlab
by using this we will design the network. Give it the input
(X3) that have been created above in the workspace of
matlab in the column format. Also give it the output (Y3)
that have been created above in the workspace of matlab in
the same column format [23].Now train them using the
Levenberg Marquardt Back propagation algorithm using
30 neurons to create a two-layer feed-forward network with
sigmoid hidden neurons and linear output neurons
(newfit), can fit multi-dimensional mapping problems
arbitrarily well, given consistent data and enough neurons
in its hidden layer.The three parameters are firstly given
given to the matrix concatenate i.e Flux error, Torque
error, Flux angle vector position (sector). In matrix
concatenate Block Number of inputs is 3 and mode is
vector. Then this output in single dimension is given to the
Neural Network and output is given to the Rounding off
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 3, Issue 4, July-August 2014 ISSN 2278-6856
Volume 3 Issue 4 July-August, 2014 Page 48
Block and then given to the gate finally. Finally generating
the Simulink model of the neural network and using it as
a substitution to the switching table used in the Direct
Torque Control drive AC4 created before. And then
comparing the results.
Fig. 8. Neural Network instead of switching Table for the
Vector model of Inverter output voltage
8. SIMULATION RESULTS
The Induction motor speed controlling model using
Conventional DTC and ANN applied DTC has been
designed and studied successfully and the results of the
thesis work are almost satisfying by using ANN in it as a
substitution of the switching table. The Sampling period of
s. To compare with Conventional DTC
and ANN DTC for Induction motor are simulated. In two
cases, the dynamic responses of speed, flux, torque and
stator current for the starting process with 0 Nm load
torque and input speed reference of 200 wm applied are
shown in Figure from 9 to 16 respectively. Figs.9 and 10
show the response of electric torque of the Conventional
DTC, and ANN DTC respectively. It can be seen that the
ripple in torque with ANN DTC control is less than 0.3
Nm and with conventional direct torque control the ripple
is about 2 Nm at the same operating conditions. Figs.11
and 12 show the response of stator flux magnitude of the
Conventional DTC and ANN DTC respectively. By ANN
DTC technique shown Fig 12, the stator flux are the fast
response in transient state and the ripple in steady state is
reduced remarkably compared with conventional DTC, the
flux changes through big oscillation and the torque ripple
is bigger in Conventional DTC. In Fig 13 and 14, It can be
seen that the ripple in speed with ANN DTC control is less
than 0.3 wm and with conventional direct torque control
the ripple is about 2 wm at the same operating conditions.
Figs 15 and 16 show the steady state current response of
the ANN_DTC has negligible ripple in stator current and
a nearly sinusoidal wave form while as with conventional
DTC the stator current has considerably very high ripple.
Fig. 9 Electromagnetic torque Response of Conventional
DTC
Fig. 10. Electromagnetic torque Response of ANN DTC
Fig. 11. Stator flux direct axis of Conventional DTC
Fig. 12. Stator flux direct axis of ANN DTC
Fig. 13. Rotor Speed Response using Conventional DTC
Fig. 14. Rotor Speed Response using ANN DTC
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 3, Issue 4, July-August 2014 ISSN 2278-6856
Volume 3 Issue 4 July-August, 2014 Page 49
Fig. 15. Stator Current phase-A in Conventional DTC
Fig. 16. Stator Current phase-A in ANN DTC
9. CONCLUSION
Direct Torque Control System Using a Neural Network is
successfully implemented on three phase induction motor.
In this work, using the MATLAB simulation, a robustly
stable neural network for the induction motor system using
the ANN toolbox is presented. A high power 3-level fed
induction motor with direct torque control system is
developed. To cope with the inherent uncertainties such as
parametric uncertainty, external disturbance and modeled
dynamics, the NN is used as an uncertainty observer.In
this thesis a ANN DTC of induction machine have been
proposed. An improved torque, speed and flux response
was achieved with the ANN DTC than the conventional
DTC. The performance has been tested by simulations.
Also, a command flux optimization scheme has been
proposed to reduce the torque ripple. The optimization was
tested using simulation. The results show a reasonable
improvement by flux optimization. The main
improvements shown are:
Reduction of torque and current ripples in transient
and steady state response.
No flux droppings caused by sector changes
circular trajectory.
Fast stator flux response in transient state.
Reduction of speed ripples in transient and steady
state response
REFERENCES
[1] Riad toufouti, Salima meziane, Hocine benalla, Direct
torque control for induction motor using intelligent
techniques, Journal of Theoretical and Applied
Information Technology, (toufoutidz,mezianedz,
Benalladz)@yahoo.fr
[2] Riad toufouti, Salima meziane, Hocine benalla, Direct
torque control strategy of induction motors, ISSN 1335-
8243 2007 Faculty of Electrical Engineering and
Informatics, Technical University of Koice, Slovak
Republic, Acta Electrotechnica et Informatica No. 1, Vol.
7, 2007.
[3] Takahashi, T. Noguchi, A new quick response and high-
efficiency control strategy of induction motor, IEEE
Trans. On IA, Vol.22, N.5, Sept/Oct 1986, PP.820-827.
[4] M. Depenbrock, Direct self control (DSC) of inverter
fed induction machine , IEEE Trans. Power Electronics,
Vol.3, N.4, Oct 1988, PP.420-829.
[5] Texas Instruments, Field Orientated Control of 3-Phase
AC-Motors, Literature Number: BPRA073, Texas
Instruments Europe February 1998.
[6] Bilal Akin and Manish Bhardwaj, Sensored Field
Oriented Control of 3-Phase Induction Motors, Copyright
2013, Texas Instruments Incorporated, SPRABP8July
2013.
[7] Tobias Geyer and Georgios Papafotiou, Direct Torque
Control for Induction Motor Drives: A Model Predictive
Control Approach Based on Feasibility, M. Morari and L.
Thiele (Eds.): HSCC 2005, LNCS 3414, pp. 274290,
2005, Springer-Verlag Berlin Heidelberg 2005.
[8] S. Buso, L. Malesani, P. Mattavelli, "Comparison of
Current Control Techniques for Active Filter Applications",
IEEE Transaction on Industrial Electronics, Vol. 45, No.5,
October 1998., pp.722-729.
[9] M.P. Kazmierkowski, L. Malesani, "Current control
techniques for three phase voltage-source PWM
converters: a survey", Industrial Electronics, IEEE
Transactions on Industrial Electronics, Vol. 45, No. 5,
Oct.1998., pp. 691 -703.
[10] Ashutosh Mishra , Prashant Choudhary, Artificial
Neural Network Based Controller for Speed Control of
an Induction Motor using Indirect Vector Control
Method, International Journal of Power Electronics
and Drive System (IJPEDS) , Vol.2, No.4, December
2012, pp. 402~408 ,ISSN: 2088-8694.
[11] Suresh Kumar Chiluka, S. Nagarjuna Chary, E
Chandra Mohan Goud, Direct torque control using
neural network approach, IJRET | APR 2013,
Volume: 2 Issue: 4, 682 686, ISSN: 2319 1163.
[12] M. zerikat, and A. chekroun, Adaptation learning
speed control for a high- performance induction motor
using neural networks, World Academy of Science,
Engineering and Technology 21 2008, P-293-298.
[13] Alberico Menozzi, Mo-yuen Chow, A design
methodology for an intelligent controller using fuzzy
logic and Artificial Neural Networks, 0-7803-0891-
3/93$03.00@1993 IEEE, P-408-413.
[14] Antsaklis, P.J., K. M. Passino and S. J. Wang,
Towards intelligent autonomous control systems:
Web Site: www.ijettcs.org Email: editor@ijettcs.org, editorijettcs@gmail.com
Volume 3, Issue 4, July-August 2014 ISSN 2278-6856
Volume 3 Issue 4 July-August, 2014 Page 50
Architecture and fundamental issues, Intelligent
Robotics System, Vol. 1,PP. 315-342, 1989.
[15] G. Kohlrusz, D. Fodor, Comparison of scalar and
vector control strategies of induction motors,
Hungarian Journal Of Industrial Chemistry Veszprem,
vol. 39(2) pp. 265-270 (2011).
[16] Anders Kronberg , Design and Simulation of Field
Oriented Control and Direct Torque Control for a
Permanent Magnet Synchronous Motor with Positive
Saliency ISRN UTH-INGUTB-EX-E-2012/05-SE,
Examensarbete 15 hp, Maj 2012.
[17] Giuseppe Buja, Domenico Casadei and Giovanni
Serra, Direct torque control of induction motor
drives, IEEE Catalog Number: 97TH8280, ISIE97-
Guimaraes, Portugal.
[18] Texas Instruments, Field Orientated Control of 3-
Phase AC-Motors, Literature Number: BPRA073,
Texas Instruments Europe, February 1998.
[19] S. Buso, L. Malesani, P. Mattavelli, "Comparison of
Current Control Techniques for Active Filter
Applications", IEEE Transaction on Industrial
Electronics, Vol. 45, No.5, October 1998., pp.722-729
[20] Bilal Akin and Nishant Garg, Scalar (V/f) Control
of 3-Phase Induction Motors, Texas Instruments,
SPRABQ8July 2013, www.ti.com.
[21] F. Parasiliti, Appunti delle lezioni di Azionamenti
Elettrici: Controllo Vettoriale ad Orientamento di
Campo, Universit degli Studi di LAquila
[22] R. Di Gabriele, F. Parasiliti, M. Tursini, Digital
Field Oriented Control for induction motors:
implementation and experimental results,
Universities Power Engineering Conference
(UPEC97)
[23] www.mathworks.com
[24] www.wikipedia.com
[25] www.naptel.co.in
You might also like
- Ieee 43 2013 - Recommended Practice For Testing Insulation Resistance ofDocument37 pagesIeee 43 2013 - Recommended Practice For Testing Insulation Resistance ofpaoloesquivel100% (6)
- High Performance Direct Torque Control of Induction Motor Drives Using Space Vector ModulationDocument9 pagesHigh Performance Direct Torque Control of Induction Motor Drives Using Space Vector ModulationMefisto ElNo ratings yet
- Comparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveDocument8 pagesComparision Between Two Level and Three Level Inverter For Direct Torque Control Induction Motor DriveMatanAbutbulNo ratings yet
- Performance Analysis On Direct Torque Controlled Induction Motor Drive With Varying Hysteresis Controller BandwidthDocument10 pagesPerformance Analysis On Direct Torque Controlled Induction Motor Drive With Varying Hysteresis Controller Bandwidthaswardi8756No ratings yet
- Direct Torque Control of Induction Motor Using Artificial Neural NetworkDocument7 pagesDirect Torque Control of Induction Motor Using Artificial Neural NetworkMohamed SomaiNo ratings yet
- Comparative Analysis of Different Control Approaches of Direct Torque Control Induction Motor DriveDocument5 pagesComparative Analysis of Different Control Approaches of Direct Torque Control Induction Motor DrivepkshanumehaboobNo ratings yet
- Im 8Document7 pagesIm 8maheswaranNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Performance Analysis of Direct Torque Control of 3-Phase Induction MotorDocument6 pagesPerformance Analysis of Direct Torque Control of 3-Phase Induction MotormaheswaranNo ratings yet
- Induction Motor ControlDocument4 pagesInduction Motor ControlJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- New Direct Torque Control Scheme of Induction Motor For Electric VehiclesDocument7 pagesNew Direct Torque Control Scheme of Induction Motor For Electric VehiclesPrasanth RamavarapuNo ratings yet
- Ds PICDocument6 pagesDs PICSindhuja VijayaraghavanNo ratings yet
- A Direct Torque Controlled Induction Motor With Variable Hysteresis BandDocument6 pagesA Direct Torque Controlled Induction Motor With Variable Hysteresis BandMuhammad SaadNo ratings yet
- Fast Direct Torque Control of An Open-End Induction Motor Drive Using 12-Sided Polygonal Voltage Space VectorsDocument11 pagesFast Direct Torque Control of An Open-End Induction Motor Drive Using 12-Sided Polygonal Voltage Space VectorsMuhammad UmarNo ratings yet
- Application of Space Vector Modulation in Direct Torque Control of PMSMDocument4 pagesApplication of Space Vector Modulation in Direct Torque Control of PMSMenmnabilNo ratings yet
- A Simple Direct-Torque Neuro-Fuzzy Control of PWM-Inverter-Fed Induction Motor DriveDocument8 pagesA Simple Direct-Torque Neuro-Fuzzy Control of PWM-Inverter-Fed Induction Motor DrivegsmaniprabaNo ratings yet
- Im 6 PDFDocument12 pagesIm 6 PDFmaheswaranNo ratings yet
- An044259264 PDFDocument6 pagesAn044259264 PDFmazenNo ratings yet
- Direct Torque Control of Induction Motor ThesisDocument5 pagesDirect Torque Control of Induction Motor Thesiscrystaljacksonnewhaven100% (2)
- Direct Torque Control PHD ThesisDocument7 pagesDirect Torque Control PHD Thesisheathervargaspeoria100% (2)
- Bldc motor controlDocument6 pagesBldc motor controlLalithNo ratings yet
- Untitled 1Document9 pagesUntitled 1sarita kumariNo ratings yet
- 245915-FinalDocument13 pages245915-FinalUtkarsh PrakashNo ratings yet
- Position Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionDocument14 pagesPosition Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionأسامةبوعزيزNo ratings yet
- Sensorless Three-Phase Induction Motor Direct TorqDocument7 pagesSensorless Three-Phase Induction Motor Direct TorqSakthivelNo ratings yet
- Design and Implementation of Flux Vector PDFDocument15 pagesDesign and Implementation of Flux Vector PDFBelal AshrafNo ratings yet
- Speed Regulation and Torque Ripple Minimization of Induction Motor by DTC With PI and Fuzzy Logic ControllerDocument6 pagesSpeed Regulation and Torque Ripple Minimization of Induction Motor by DTC With PI and Fuzzy Logic ControllerVijay KumarNo ratings yet
- A Variable-Speed, Sensorless, Induction Motor Drive Using DC Link MeasurementsDocument6 pagesA Variable-Speed, Sensorless, Induction Motor Drive Using DC Link Measurementsgowtam_raviNo ratings yet
- New DTC Control Scheme For Induction Motors Fed With A Three-Level InverterDocument9 pagesNew DTC Control Scheme For Induction Motors Fed With A Three-Level InverterANKIT PRAJAPATINo ratings yet
- Jeas 0408 94Document7 pagesJeas 0408 94Jun Chee LimNo ratings yet
- Design and Customization of Embedded Based Direct Torque Controller OfInduction MotorDocument6 pagesDesign and Customization of Embedded Based Direct Torque Controller OfInduction MotorTJPRC PublicationsNo ratings yet
- Direct Torque Control InductionDocument9 pagesDirect Torque Control InductiononafetsNo ratings yet
- Thesis On Direct Torque ControlDocument6 pagesThesis On Direct Torque Controlericabaldwinpittsburgh100% (2)
- Direct Torque Control of Induction MotorsDocument6 pagesDirect Torque Control of Induction MotorsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Paper 78Document8 pagesPaper 78Sanker VikramNo ratings yet
- Vector Control Simulation of AC MotorDocument16 pagesVector Control Simulation of AC MotorJosedocampocastro100% (1)
- Adaptive Bandwidth Approach ON DTC Controlled Induction MotorDocument9 pagesAdaptive Bandwidth Approach ON DTC Controlled Induction MotorijicsjournalNo ratings yet
- 7117ijics02 PDFDocument10 pages7117ijics02 PDFijicsjournalNo ratings yet
- Paper 21Document7 pagesPaper 21Anu AthiraNo ratings yet
- Energies 11 01793Document14 pagesEnergies 11 01793DiegoTorresNo ratings yet
- Torque Ripple Reduction Technique With Improved Flux Response For A Direct Torque Control Induction Motor DriveDocument17 pagesTorque Ripple Reduction Technique With Improved Flux Response For A Direct Torque Control Induction Motor DriveMuhammad UmarNo ratings yet
- Education DTC 380 PDFDocument6 pagesEducation DTC 380 PDFНебојша МитровићNo ratings yet
- Dynamic Performance and Analysis of Direct Torque Control Method Based On DSP For PMSM DrivesDocument5 pagesDynamic Performance and Analysis of Direct Torque Control Method Based On DSP For PMSM DrivesRaspy ReddyNo ratings yet
- Full Text 302010Document8 pagesFull Text 302010belsebtiNo ratings yet
- Mathematical Analysis of SVPWM For Inverter Fed DTC of Induction Motor DriveDocument6 pagesMathematical Analysis of SVPWM For Inverter Fed DTC of Induction Motor DriveNicola Claudiu-IonelNo ratings yet
- Speed Control of PMSM by Using DSVM - DTC TechniqueDocument5 pagesSpeed Control of PMSM by Using DSVM - DTC TechniqueKushagra KhamesraNo ratings yet
- Ijaiem 2013 08 25 054Document11 pagesIjaiem 2013 08 25 054International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Direct Torque ControlDocument5 pagesDirect Torque Controlvineeth kumarNo ratings yet
- CMP0193 SynopsisDocument6 pagesCMP0193 Synopsissumiths32No ratings yet
- Thesis Direct Torque ControlDocument7 pagesThesis Direct Torque Controljuliemoralesomaha100% (2)
- Space Vector Flux Weakening Control of PMSM DriverDocument8 pagesSpace Vector Flux Weakening Control of PMSM DriverOsama AttookNo ratings yet
- Ijetae 1013 117Document9 pagesIjetae 1013 117rasim_m1146No ratings yet
- Brushed DC Sensorless FeedbackDocument3 pagesBrushed DC Sensorless FeedbackHoon Miew JieNo ratings yet
- Applsci 08 01073 PDFDocument13 pagesApplsci 08 01073 PDFErsi Ago100% (1)
- Direct Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorDocument6 pagesDirect Torque Control Using Phase Current Reconstruction Algorithm in Induction MotorquocyenkcdNo ratings yet
- Implementation of A Fuzzy PI Controller For Speed Control of Induction Motors Using FPGADocument7 pagesImplementation of A Fuzzy PI Controller For Speed Control of Induction Motors Using FPGABharati RajaNo ratings yet
- PID Controller For A Two Quadrant Chopper Fed DC Motor DriveDocument5 pagesPID Controller For A Two Quadrant Chopper Fed DC Motor DriveSalman HabibNo ratings yet
- Design and Implementation of Conveyor Line Speed Synchroniser For Industrial Control Applications: A Case Study of Champion'S Breweries PLC, UyoDocument9 pagesDesign and Implementation of Conveyor Line Speed Synchroniser For Industrial Control Applications: A Case Study of Champion'S Breweries PLC, UyomyselfdebjyotiNo ratings yet
- Sensorless Vector Controller For A Synchronous Reluctance MotorDocument9 pagesSensorless Vector Controller For A Synchronous Reluctance MotorUma SathyadevanNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Detection of Malicious Web Contents Using Machine and Deep Learning ApproachesDocument6 pagesDetection of Malicious Web Contents Using Machine and Deep Learning ApproachesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- THE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSDocument7 pagesTHE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Study of Customer Experience and Uses of Uber Cab Services in MumbaiDocument12 pagesStudy of Customer Experience and Uses of Uber Cab Services in MumbaiInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Analysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyDocument6 pagesAnalysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Soil Stabilization of Road by Using Spent WashDocument7 pagesSoil Stabilization of Road by Using Spent WashInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Mexican Innovation System: A System's Dynamics PerspectiveDocument12 pagesThe Mexican Innovation System: A System's Dynamics PerspectiveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDocument8 pagesDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)Document10 pagesA Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Staycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityDocument10 pagesStaycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Synthetic Datasets For Myocardial Infarction Based On Actual DatasetsDocument9 pagesSynthetic Datasets For Myocardial Infarction Based On Actual DatasetsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Performance of Short Transmission Line Using Mathematical MethodDocument8 pagesPerformance of Short Transmission Line Using Mathematical MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaDocument5 pagesThe Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Deep Learning Based Assistant For The Visually ImpairedDocument11 pagesA Deep Learning Based Assistant For The Visually ImpairedInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationDocument13 pagesDesign and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Swot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictDocument5 pagesSwot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Impact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryDocument8 pagesImpact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Anchoring of Inflation Expectations and Monetary Policy Transparency in IndiaDocument9 pagesAnchoring of Inflation Expectations and Monetary Policy Transparency in IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Ijaiem 2021 01 28 6Document9 pagesIjaiem 2021 01 28 6International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Side Lobe Level Reduction in Antenna Array Using Weighting FunctionDocument5 pagesSide Lobe Level Reduction in Antenna Array Using Weighting FunctionghorbanlNo ratings yet
- Semiconductor Technical Data: L SuffixDocument12 pagesSemiconductor Technical Data: L SuffixSuwandra I Gede PutuNo ratings yet
- Nte 722Document2 pagesNte 722WilliamNo ratings yet
- ExcelStor Technology ATA & SATA Installation Guide (User Manual) (Rev. E)Document6 pagesExcelStor Technology ATA & SATA Installation Guide (User Manual) (Rev. E)MechDRNo ratings yet
- Controlling The Temperature Inside Equipment Racks © 2002-2010 Middle Atlantic Products, IncDocument36 pagesControlling The Temperature Inside Equipment Racks © 2002-2010 Middle Atlantic Products, Incvoltus88No ratings yet
- Adobe Scan 26-Apr-2024Document1 pageAdobe Scan 26-Apr-2024amayaimaneulNo ratings yet
- 亿光EL817Document11 pages亿光EL817Douglas RodriguesNo ratings yet
- DTMF Signalling in 3gDocument10 pagesDTMF Signalling in 3gFaheem AkhtarNo ratings yet
- Axial Fan DELTAQFR1212GHEDocument1 pageAxial Fan DELTAQFR1212GHEJosé Edilson da PazNo ratings yet
- Vijay FPP ESD PT11Document65 pagesVijay FPP ESD PT11Swathi PrasadNo ratings yet
- Control System Grounding - Part 2 - Ground Wiring, Shield Grounds, and Power Supply GroundingDocument10 pagesControl System Grounding - Part 2 - Ground Wiring, Shield Grounds, and Power Supply Groundingwaqas_a_shaikh4348No ratings yet
- CD1000A - User Manual V1.0Document88 pagesCD1000A - User Manual V1.0Engr ShoaibNo ratings yet
- Page 44Document1 pagePage 44Abhishek ShatagopachariNo ratings yet
- 203: Electrical Installations Technology: Handout 3: DrawingsDocument4 pages203: Electrical Installations Technology: Handout 3: DrawingsUsman AshrafNo ratings yet
- 1035 Mitsubishi M56733afpDocument4 pages1035 Mitsubishi M56733afpHenrique Tannús CarvalhoNo ratings yet
- Microwave New Bench ManualDocument51 pagesMicrowave New Bench Manual039 MeghaEceNo ratings yet
- Vibration Energy Harvesting Using Piezoelectric Transducer and Non-Controlled Rectifiers CircuitsDocument8 pagesVibration Energy Harvesting Using Piezoelectric Transducer and Non-Controlled Rectifiers Circuitsrajeev_kumar365No ratings yet
- Ts-Po16392-2cx10mm, 3CX6MM, 3CX10MM, 4CX6MM, 4CX16MMDocument2 pagesTs-Po16392-2cx10mm, 3CX6MM, 3CX10MM, 4CX6MM, 4CX16MMmohd darusNo ratings yet
- Intelligent Detector Bases: FeaturesDocument3 pagesIntelligent Detector Bases: FeaturesMarcelo FradeNo ratings yet
- Loop SounderDocument1 pageLoop Sounderhiddenhidden16No ratings yet
- Bicolour LED Flasher CircuitDocument5 pagesBicolour LED Flasher CircuitAnkita WalkeNo ratings yet
- FK202 SeriesDocument4 pagesFK202 Serieskylegaze100% (1)
- Catalog 12 PagesDocument12 pagesCatalog 12 PagesueksinNo ratings yet
- Line To Line Fault ExperimentsDocument6 pagesLine To Line Fault ExperimentsXian ChaoweNo ratings yet
- Introduction To Wireless Network EquipmentDocument291 pagesIntroduction To Wireless Network EquipmentMesfin TibebeNo ratings yet
- DMT 219004 AbDocument518 pagesDMT 219004 AbCiprian MariusNo ratings yet
- 2010 Legacy and Outback Wiring DiagramDocument262 pages2010 Legacy and Outback Wiring DiagramWilliam Guillen DamianNo ratings yet
- Socomec Delphys GP 2.0 500kva Control PanelDocument20 pagesSocomec Delphys GP 2.0 500kva Control PanelsharifmousaviNo ratings yet
- DDC For HVACDocument23 pagesDDC For HVACTorus EngenhariaNo ratings yet