
Uav 6
Uav 6
You might also like
- Diagrama International VT365Document2 pagesDiagrama International VT365Edwin Motta Piamba89% (56)
- Macroeconomics 6th Edition Williamson Solutions Manual DownloadDocument13 pagesMacroeconomics 6th Edition Williamson Solutions Manual DownloadDarrell Davis100% (24)
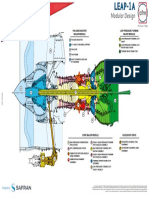
- LEAP-1A A3 Modular Design Rev2.0Document1 pageLEAP-1A A3 Modular Design Rev2.0SatishReddy100% (4)
- Caliya S Chronicle of Runes Alpha Playtest v0.1Document49 pagesCaliya S Chronicle of Runes Alpha Playtest v0.1James Deming100% (1)
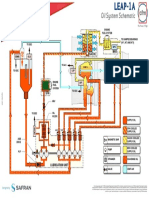
- LEAP-1A A3 79-Oil System Rev2.0Document1 pageLEAP-1A A3 79-Oil System Rev2.0SatishReddy100% (2)
- Contractors List of USADocument21 pagesContractors List of USAjerry 121100% (2)
- Dissertation BitsDocument21 pagesDissertation BitsSatishReddyNo ratings yet
- What Makes Great ArtDocument45 pagesWhat Makes Great Artsaba100% (1)
- 4G CommandDocument3 pages4G Commandvivek100% (2)
- TASK 12!13!79-610-011-A Check Oil Level and ReplenishDocument6 pagesTASK 12!13!79-610-011-A Check Oil Level and ReplenishSatishReddyNo ratings yet
- System Optimization of Motor ResolverDocument27 pagesSystem Optimization of Motor ResolverBlaize PascalNo ratings yet
- LTC2440 PDFDocument28 pagesLTC2440 PDFyusufwpNo ratings yet
- 74LS93Document11 pages74LS93cocoxo13marNo ratings yet
- ResolverDocument8 pagesResolverNishant KalbhorNo ratings yet
- Cisco ComandDocument122 pagesCisco ComandJaime MoralesNo ratings yet
- Ecu P240 Command PDFDocument9 pagesEcu P240 Command PDFChristopher Santos100% (1)
- Sound Multiplex Demodulator IC For TV in The North American MarketDocument11 pagesSound Multiplex Demodulator IC For TV in The North American Marketjosenicolas12000No ratings yet
- GM16C550Document23 pagesGM16C550kranti06No ratings yet
- Transport Overhead: STS-1 Envelope CapacityDocument42 pagesTransport Overhead: STS-1 Envelope CapacityRupali MisriNo ratings yet
- Automatic Voltage RegulatorsDocument35 pagesAutomatic Voltage RegulatorsAlejandroHerreraGurideChileNo ratings yet
- Service Manual: CDX-L480XDocument20 pagesService Manual: CDX-L480Xkeremelekika7No ratings yet
- Korg DW-8000 Service ManualDocument47 pagesKorg DW-8000 Service ManualMatthew DavidsonNo ratings yet
- Tutorial - 3-Phase Inverter Control Loop DesignDocument11 pagesTutorial - 3-Phase Inverter Control Loop DesignJandfor Tansfg ErrottNo ratings yet
- Kenwood 13 PinDocument7 pagesKenwood 13 Pingabr3lNo ratings yet
- LK315T3LA57Document24 pagesLK315T3LA57Repararelcd Lcd0% (1)
- RTXM191-404 (Tellabs)Document14 pagesRTXM191-404 (Tellabs)markingtv100% (2)
- Topic 5: Servo Chip DesignDocument50 pagesTopic 5: Servo Chip Designboarddk1No ratings yet
- G2B and G3B CANopen FDocument12 pagesG2B and G3B CANopen Fangel silvaNo ratings yet
- CX Programer-Help-Instruction Sets - C-SeriesDocument8 pagesCX Programer-Help-Instruction Sets - C-SeriesddadaraNo ratings yet
- ATV12 Communication Parameters BBV51917 1.4IE05bDocument12 pagesATV12 Communication Parameters BBV51917 1.4IE05bRicardo Rodriguez ParedesNo ratings yet
- 74LS175Document3 pages74LS175Yesenia RojoNo ratings yet
- Networkplus Training Center: Hcia LabDocument8 pagesNetworkplus Training Center: Hcia LabahmedNo ratings yet
- DM 74 Ls 90Document6 pagesDM 74 Ls 90Clesio MichaelNo ratings yet
- C&i Lab-2019Document67 pagesC&i Lab-2019aniruthNo ratings yet
- Tle 6220 PDFDocument17 pagesTle 6220 PDFFabio JuniorNo ratings yet
- Control Lab NoteDocument19 pagesControl Lab NoteSK-062; 470; Afsana Anjum AkhiNo ratings yet
- Sony cdx-c5850r PDFDocument11 pagesSony cdx-c5850r PDFModerkayNo ratings yet
- Automatic Voltage RegulatorDocument35 pagesAutomatic Voltage Regulatoryousufswh100% (1)
- Fundamentals of Digital IC Design: Haibo Wang ECE Department Southern Illinois University Carbondale, IL 62901Document29 pagesFundamentals of Digital IC Design: Haibo Wang ECE Department Southern Illinois University Carbondale, IL 62901Huzur AhmedNo ratings yet
- Day 20.1ConfiguringFrameRelayDocument17 pagesDay 20.1ConfiguringFrameRelayGorvam SaddarNo ratings yet
- Isppac 10: Features Functional Block DiagramDocument23 pagesIsppac 10: Features Functional Block DiagramFaiber CalderonNo ratings yet
- LTE MO CommandsDocument31 pagesLTE MO CommandskumarNo ratings yet
- DELL Inspiron N4020Document88 pagesDELL Inspiron N4020Deddy SuyantoNo ratings yet
- Obd-Ii: RS-232 Serial CableDocument5 pagesObd-Ii: RS-232 Serial CableAmir EmraniNo ratings yet
- PF700 Block Diag 6-03 PDFDocument12 pagesPF700 Block Diag 6-03 PDFLD AguilarNo ratings yet
- 24LC02BDocument26 pages24LC02Bjab_arx1No ratings yet
- LK370D3LZ33Document31 pagesLK370D3LZ33Fly KuNo ratings yet
- XC9572 In-System Programmable CPLD: Features DescriptionDocument9 pagesXC9572 In-System Programmable CPLD: Features DescriptionManish PushkarNo ratings yet
- CD4553 Datasheet OKDocument13 pagesCD4553 Datasheet OKCong ThoNo ratings yet
- IC CXD3068Q DatasheetDocument134 pagesIC CXD3068Q Datasheetnaupas007No ratings yet
- Using The Hall Decoder (HD) eTPU Function: Covers The MCF523x, MPC5500, and All eTPU-equipped DevicesDocument20 pagesUsing The Hall Decoder (HD) eTPU Function: Covers The MCF523x, MPC5500, and All eTPU-equipped Devicesnarayana swamyNo ratings yet
- Configuration Parameters Rev 4.2.1Document2 pagesConfiguration Parameters Rev 4.2.1HuetaLuisNo ratings yet
- Institute of Engineering Purwanchal Campus, Dharan-8Document12 pagesInstitute of Engineering Purwanchal Campus, Dharan-8Milan AcharyaNo ratings yet
- Ds92Lv16: Ds92Lv16 16-Bit Bus Lvds Serializer/Deserializer - 25 - 80 MHZDocument21 pagesDs92Lv16: Ds92Lv16 16-Bit Bus Lvds Serializer/Deserializer - 25 - 80 MHZlur46No ratings yet
- S7-200 Quick Reference Information: Special Memory BitsDocument6 pagesS7-200 Quick Reference Information: Special Memory BitspremchandarNo ratings yet
- CD 74 HC 194Document18 pagesCD 74 HC 194rrebollarNo ratings yet
- XL DC ManualDocument105 pagesXL DC Manualmoconnor812No ratings yet
- Digital Signal Processing Using the ARM Cortex M4From EverandDigital Signal Processing Using the ARM Cortex M4Rating: 1 out of 5 stars1/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Network with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationFrom EverandNetwork with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationNo ratings yet
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxFrom EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxRating: 4 out of 5 stars4/5 (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Chipless Radio Frequency Identification Reader Signal ProcessingFrom EverandChipless Radio Frequency Identification Reader Signal ProcessingNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- 04 Sensors AircraftDocument3 pages04 Sensors AircraftSatishReddyNo ratings yet
- Evolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemDocument7 pagesEvolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- ATR 72-212A 01 of 2016Document1 pageATR 72-212A 01 of 2016SatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- M11 May 2018Document8 pagesM11 May 2018SatishReddyNo ratings yet
- Journal Article Without DOIDocument2 pagesJournal Article Without DOISatishReddyNo ratings yet
- Dgca Module 11 Part 06Document19 pagesDgca Module 11 Part 06SatishReddyNo ratings yet
- Approved Course Mto TRV PDFDocument1 pageApproved Course Mto TRV PDFSatishReddyNo ratings yet
- Task 46!21!00-710-002-A VHF 3 Link Test of The AtsuDocument8 pagesTask 46!21!00-710-002-A VHF 3 Link Test of The AtsuSatishReddyNo ratings yet
- Module 3 QsDocument44 pagesModule 3 QsSatishReddy100% (1)
- ProjectDocument4 pagesProjectSatishReddyNo ratings yet
- Task 46!21!00-740-001-A Bite Test of The AtimsDocument4 pagesTask 46!21!00-740-001-A Bite Test of The AtimsSatishReddy100% (1)
- Model Name: GA-B75M-D2V: Gigabyte TechnologyDocument26 pagesModel Name: GA-B75M-D2V: Gigabyte TechnologyMaaf GarenaNo ratings yet
- Query Optimization MCQDocument12 pagesQuery Optimization MCQSameer vermaNo ratings yet
- Question CHP 5Document5 pagesQuestion CHP 5pearlynpuayNo ratings yet
- Exploration and Production Activities Map For South AfricaDocument1 pageExploration and Production Activities Map For South AfricamthiyanecdNo ratings yet
- Crew Health Self-Declaration and Daily Temperature Record - Global - Onsigner Version OCT2020Document2 pagesCrew Health Self-Declaration and Daily Temperature Record - Global - Onsigner Version OCT2020Knowrain ParasNo ratings yet
- CloudDocument31 pagesCloudRam MetkarNo ratings yet
- 2016 ORION Consolidated Audit ReportDocument112 pages2016 ORION Consolidated Audit ReportJoachim VIALLONNo ratings yet
- LDP1 - FA4 - Answer Sheet TemplateDocument2 pagesLDP1 - FA4 - Answer Sheet TemplateTeacher CarlaNo ratings yet
- The Elusive Chemical Potential PDFDocument12 pagesThe Elusive Chemical Potential PDFbonesisaliveNo ratings yet
- Teks Story TellingDocument2 pagesTeks Story TellingAve FauzisarNo ratings yet
- CloudEngine 7800&6800&5800 V100R005 (C00&C10) Configuration Guide - Ethernet SwitchingDocument637 pagesCloudEngine 7800&6800&5800 V100R005 (C00&C10) Configuration Guide - Ethernet SwitchingAlexander VasquezNo ratings yet
- Holzer MethodDocument13 pagesHolzer Methodmeadot getachew100% (1)
- The Pure Land On Earth The Chronicles of PDFDocument9 pagesThe Pure Land On Earth The Chronicles of PDFBhikshu GovindaNo ratings yet
- Wachemo UniversityDocument48 pagesWachemo UniversityMarshet yohannes100% (1)
- 1.2c atDocument3 pages1.2c atenyw160309No ratings yet
- (TV) Present TenseDocument8 pages(TV) Present TenseDe Aparicio DenisseNo ratings yet
- Fire and Life Safety ConceptDocument23 pagesFire and Life Safety ConceptDeboline MitraNo ratings yet
- Fernerkundungsbasierte, Automatisierte, Multisensorale Brandflächendetektion Im Kruger National Park, SüdafrikaDocument151 pagesFernerkundungsbasierte, Automatisierte, Multisensorale Brandflächendetektion Im Kruger National Park, SüdafrikawurstomanNo ratings yet
- Oil Pressure Transmission PT2509Document3 pagesOil Pressure Transmission PT2509Trisna TeaNo ratings yet
- IT 16 - Neurogenic Bladder - SMDocument31 pagesIT 16 - Neurogenic Bladder - SMRurie Awalia SuhardiNo ratings yet
- Delta and Estuaries PDFDocument8 pagesDelta and Estuaries PDFIwan PrabowoNo ratings yet
- 01 Formulae, Equations and Amount of SubstanceDocument19 pages01 Formulae, Equations and Amount of SubstanceRaja ShahrukhNo ratings yet
- Assesment BMDocument7 pagesAssesment BMTeja GajjarNo ratings yet
- Essential Orthopaedics 2Nd Edition Mark D Miller Full ChapterDocument67 pagesEssential Orthopaedics 2Nd Edition Mark D Miller Full Chaptermargaret.jones429100% (8)
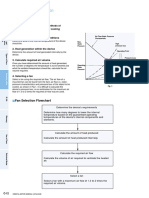
- Example of Fan Selection: Selecting ProcedureDocument2 pagesExample of Fan Selection: Selecting ProcedureBaoLCNo ratings yet
- APH PresentationDocument36 pagesAPH PresentationBhargav Chaudhari100% (1)









































































































Download as pdf or txt
You might also like
- Diagrama International VT365Document2 pagesDiagrama International VT365Edwin Motta Piamba89% (56)
- Macroeconomics 6th Edition Williamson Solutions Manual DownloadDocument13 pagesMacroeconomics 6th Edition Williamson Solutions Manual DownloadDarrell Davis100% (24)
- LEAP-1A A3 Modular Design Rev2.0Document1 pageLEAP-1A A3 Modular Design Rev2.0SatishReddy100% (4)
- Caliya S Chronicle of Runes Alpha Playtest v0.1Document49 pagesCaliya S Chronicle of Runes Alpha Playtest v0.1James Deming100% (1)
- LEAP-1A A3 79-Oil System Rev2.0Document1 pageLEAP-1A A3 79-Oil System Rev2.0SatishReddy100% (2)
- Contractors List of USADocument21 pagesContractors List of USAjerry 121100% (2)
- Dissertation BitsDocument21 pagesDissertation BitsSatishReddyNo ratings yet
- What Makes Great ArtDocument45 pagesWhat Makes Great Artsaba100% (1)
- 4G CommandDocument3 pages4G Commandvivek100% (2)
- TASK 12!13!79-610-011-A Check Oil Level and ReplenishDocument6 pagesTASK 12!13!79-610-011-A Check Oil Level and ReplenishSatishReddyNo ratings yet
- System Optimization of Motor ResolverDocument27 pagesSystem Optimization of Motor ResolverBlaize PascalNo ratings yet
- LTC2440 PDFDocument28 pagesLTC2440 PDFyusufwpNo ratings yet
- 74LS93Document11 pages74LS93cocoxo13marNo ratings yet
- ResolverDocument8 pagesResolverNishant KalbhorNo ratings yet
- Cisco ComandDocument122 pagesCisco ComandJaime MoralesNo ratings yet
- Ecu P240 Command PDFDocument9 pagesEcu P240 Command PDFChristopher Santos100% (1)
- Sound Multiplex Demodulator IC For TV in The North American MarketDocument11 pagesSound Multiplex Demodulator IC For TV in The North American Marketjosenicolas12000No ratings yet
- GM16C550Document23 pagesGM16C550kranti06No ratings yet
- Transport Overhead: STS-1 Envelope CapacityDocument42 pagesTransport Overhead: STS-1 Envelope CapacityRupali MisriNo ratings yet
- Automatic Voltage RegulatorsDocument35 pagesAutomatic Voltage RegulatorsAlejandroHerreraGurideChileNo ratings yet
- Service Manual: CDX-L480XDocument20 pagesService Manual: CDX-L480Xkeremelekika7No ratings yet
- Korg DW-8000 Service ManualDocument47 pagesKorg DW-8000 Service ManualMatthew DavidsonNo ratings yet
- Tutorial - 3-Phase Inverter Control Loop DesignDocument11 pagesTutorial - 3-Phase Inverter Control Loop DesignJandfor Tansfg ErrottNo ratings yet
- Kenwood 13 PinDocument7 pagesKenwood 13 Pingabr3lNo ratings yet
- LK315T3LA57Document24 pagesLK315T3LA57Repararelcd Lcd0% (1)
- RTXM191-404 (Tellabs)Document14 pagesRTXM191-404 (Tellabs)markingtv100% (2)
- Topic 5: Servo Chip DesignDocument50 pagesTopic 5: Servo Chip Designboarddk1No ratings yet
- G2B and G3B CANopen FDocument12 pagesG2B and G3B CANopen Fangel silvaNo ratings yet
- CX Programer-Help-Instruction Sets - C-SeriesDocument8 pagesCX Programer-Help-Instruction Sets - C-SeriesddadaraNo ratings yet
- ATV12 Communication Parameters BBV51917 1.4IE05bDocument12 pagesATV12 Communication Parameters BBV51917 1.4IE05bRicardo Rodriguez ParedesNo ratings yet
- 74LS175Document3 pages74LS175Yesenia RojoNo ratings yet
- Networkplus Training Center: Hcia LabDocument8 pagesNetworkplus Training Center: Hcia LabahmedNo ratings yet
- DM 74 Ls 90Document6 pagesDM 74 Ls 90Clesio MichaelNo ratings yet
- C&i Lab-2019Document67 pagesC&i Lab-2019aniruthNo ratings yet
- Tle 6220 PDFDocument17 pagesTle 6220 PDFFabio JuniorNo ratings yet
- Control Lab NoteDocument19 pagesControl Lab NoteSK-062; 470; Afsana Anjum AkhiNo ratings yet
- Sony cdx-c5850r PDFDocument11 pagesSony cdx-c5850r PDFModerkayNo ratings yet
- Automatic Voltage RegulatorDocument35 pagesAutomatic Voltage Regulatoryousufswh100% (1)
- Fundamentals of Digital IC Design: Haibo Wang ECE Department Southern Illinois University Carbondale, IL 62901Document29 pagesFundamentals of Digital IC Design: Haibo Wang ECE Department Southern Illinois University Carbondale, IL 62901Huzur AhmedNo ratings yet
- Day 20.1ConfiguringFrameRelayDocument17 pagesDay 20.1ConfiguringFrameRelayGorvam SaddarNo ratings yet
- Isppac 10: Features Functional Block DiagramDocument23 pagesIsppac 10: Features Functional Block DiagramFaiber CalderonNo ratings yet
- LTE MO CommandsDocument31 pagesLTE MO CommandskumarNo ratings yet
- DELL Inspiron N4020Document88 pagesDELL Inspiron N4020Deddy SuyantoNo ratings yet
- Obd-Ii: RS-232 Serial CableDocument5 pagesObd-Ii: RS-232 Serial CableAmir EmraniNo ratings yet
- PF700 Block Diag 6-03 PDFDocument12 pagesPF700 Block Diag 6-03 PDFLD AguilarNo ratings yet
- 24LC02BDocument26 pages24LC02Bjab_arx1No ratings yet
- LK370D3LZ33Document31 pagesLK370D3LZ33Fly KuNo ratings yet
- XC9572 In-System Programmable CPLD: Features DescriptionDocument9 pagesXC9572 In-System Programmable CPLD: Features DescriptionManish PushkarNo ratings yet
- CD4553 Datasheet OKDocument13 pagesCD4553 Datasheet OKCong ThoNo ratings yet
- IC CXD3068Q DatasheetDocument134 pagesIC CXD3068Q Datasheetnaupas007No ratings yet
- Using The Hall Decoder (HD) eTPU Function: Covers The MCF523x, MPC5500, and All eTPU-equipped DevicesDocument20 pagesUsing The Hall Decoder (HD) eTPU Function: Covers The MCF523x, MPC5500, and All eTPU-equipped Devicesnarayana swamyNo ratings yet
- Configuration Parameters Rev 4.2.1Document2 pagesConfiguration Parameters Rev 4.2.1HuetaLuisNo ratings yet
- Institute of Engineering Purwanchal Campus, Dharan-8Document12 pagesInstitute of Engineering Purwanchal Campus, Dharan-8Milan AcharyaNo ratings yet
- Ds92Lv16: Ds92Lv16 16-Bit Bus Lvds Serializer/Deserializer - 25 - 80 MHZDocument21 pagesDs92Lv16: Ds92Lv16 16-Bit Bus Lvds Serializer/Deserializer - 25 - 80 MHZlur46No ratings yet
- S7-200 Quick Reference Information: Special Memory BitsDocument6 pagesS7-200 Quick Reference Information: Special Memory BitspremchandarNo ratings yet
- CD 74 HC 194Document18 pagesCD 74 HC 194rrebollarNo ratings yet
- XL DC ManualDocument105 pagesXL DC Manualmoconnor812No ratings yet
- Digital Signal Processing Using the ARM Cortex M4From EverandDigital Signal Processing Using the ARM Cortex M4Rating: 1 out of 5 stars1/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Network with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationFrom EverandNetwork with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationNo ratings yet
- Exploring BeagleBone: Tools and Techniques for Building with Embedded LinuxFrom EverandExploring BeagleBone: Tools and Techniques for Building with Embedded LinuxRating: 4 out of 5 stars4/5 (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Chipless Radio Frequency Identification Reader Signal ProcessingFrom EverandChipless Radio Frequency Identification Reader Signal ProcessingNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- 04 Sensors AircraftDocument3 pages04 Sensors AircraftSatishReddyNo ratings yet
- Evolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemDocument7 pagesEvolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- ATR 72-212A 01 of 2016Document1 pageATR 72-212A 01 of 2016SatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- M11 May 2018Document8 pagesM11 May 2018SatishReddyNo ratings yet
- Journal Article Without DOIDocument2 pagesJournal Article Without DOISatishReddyNo ratings yet
- Dgca Module 11 Part 06Document19 pagesDgca Module 11 Part 06SatishReddyNo ratings yet
- Approved Course Mto TRV PDFDocument1 pageApproved Course Mto TRV PDFSatishReddyNo ratings yet
- Task 46!21!00-710-002-A VHF 3 Link Test of The AtsuDocument8 pagesTask 46!21!00-710-002-A VHF 3 Link Test of The AtsuSatishReddyNo ratings yet
- Module 3 QsDocument44 pagesModule 3 QsSatishReddy100% (1)
- ProjectDocument4 pagesProjectSatishReddyNo ratings yet
- Task 46!21!00-740-001-A Bite Test of The AtimsDocument4 pagesTask 46!21!00-740-001-A Bite Test of The AtimsSatishReddy100% (1)
- Model Name: GA-B75M-D2V: Gigabyte TechnologyDocument26 pagesModel Name: GA-B75M-D2V: Gigabyte TechnologyMaaf GarenaNo ratings yet
- Query Optimization MCQDocument12 pagesQuery Optimization MCQSameer vermaNo ratings yet
- Question CHP 5Document5 pagesQuestion CHP 5pearlynpuayNo ratings yet
- Exploration and Production Activities Map For South AfricaDocument1 pageExploration and Production Activities Map For South AfricamthiyanecdNo ratings yet
- Crew Health Self-Declaration and Daily Temperature Record - Global - Onsigner Version OCT2020Document2 pagesCrew Health Self-Declaration and Daily Temperature Record - Global - Onsigner Version OCT2020Knowrain ParasNo ratings yet
- CloudDocument31 pagesCloudRam MetkarNo ratings yet
- 2016 ORION Consolidated Audit ReportDocument112 pages2016 ORION Consolidated Audit ReportJoachim VIALLONNo ratings yet
- LDP1 - FA4 - Answer Sheet TemplateDocument2 pagesLDP1 - FA4 - Answer Sheet TemplateTeacher CarlaNo ratings yet
- The Elusive Chemical Potential PDFDocument12 pagesThe Elusive Chemical Potential PDFbonesisaliveNo ratings yet
- Teks Story TellingDocument2 pagesTeks Story TellingAve FauzisarNo ratings yet
- CloudEngine 7800&6800&5800 V100R005 (C00&C10) Configuration Guide - Ethernet SwitchingDocument637 pagesCloudEngine 7800&6800&5800 V100R005 (C00&C10) Configuration Guide - Ethernet SwitchingAlexander VasquezNo ratings yet
- Holzer MethodDocument13 pagesHolzer Methodmeadot getachew100% (1)
- The Pure Land On Earth The Chronicles of PDFDocument9 pagesThe Pure Land On Earth The Chronicles of PDFBhikshu GovindaNo ratings yet
- Wachemo UniversityDocument48 pagesWachemo UniversityMarshet yohannes100% (1)
- 1.2c atDocument3 pages1.2c atenyw160309No ratings yet
- (TV) Present TenseDocument8 pages(TV) Present TenseDe Aparicio DenisseNo ratings yet
- Fire and Life Safety ConceptDocument23 pagesFire and Life Safety ConceptDeboline MitraNo ratings yet
- Fernerkundungsbasierte, Automatisierte, Multisensorale Brandflächendetektion Im Kruger National Park, SüdafrikaDocument151 pagesFernerkundungsbasierte, Automatisierte, Multisensorale Brandflächendetektion Im Kruger National Park, SüdafrikawurstomanNo ratings yet
- Oil Pressure Transmission PT2509Document3 pagesOil Pressure Transmission PT2509Trisna TeaNo ratings yet
- IT 16 - Neurogenic Bladder - SMDocument31 pagesIT 16 - Neurogenic Bladder - SMRurie Awalia SuhardiNo ratings yet
- Delta and Estuaries PDFDocument8 pagesDelta and Estuaries PDFIwan PrabowoNo ratings yet
- 01 Formulae, Equations and Amount of SubstanceDocument19 pages01 Formulae, Equations and Amount of SubstanceRaja ShahrukhNo ratings yet
- Assesment BMDocument7 pagesAssesment BMTeja GajjarNo ratings yet
- Essential Orthopaedics 2Nd Edition Mark D Miller Full ChapterDocument67 pagesEssential Orthopaedics 2Nd Edition Mark D Miller Full Chaptermargaret.jones429100% (8)
- Example of Fan Selection: Selecting ProcedureDocument2 pagesExample of Fan Selection: Selecting ProcedureBaoLCNo ratings yet
- APH PresentationDocument36 pagesAPH PresentationBhargav Chaudhari100% (1)