
Accident Prediction Models For Urban Roads
Accident Prediction Models For Urban Roads
You might also like
- Obeying and Observing Traffic Rules and RegulationsDocument18 pagesObeying and Observing Traffic Rules and Regulationsflorence baliwang64% (11)
- PWA Standard DetailsDocument206 pagesPWA Standard DetailsHaytham Tantawy73% (15)
- Highway Link DesignDocument77 pagesHighway Link Designalan toomeyNo ratings yet
- Private VehiCLE OWNERSHIP Vs Public TransportDocument29 pagesPrivate VehiCLE OWNERSHIP Vs Public Transportuhope100% (7)
- 2010 - Nevada DOT Standard Plans PDFDocument279 pages2010 - Nevada DOT Standard Plans PDFChunyu Zhang0% (1)
- Accident Prediction Models For Road NetworksDocument11 pagesAccident Prediction Models For Road NetworksMd Didarul AlamNo ratings yet
- MNGKJHTF, KDocument9 pagesMNGKJHTF, KchuniNo ratings yet
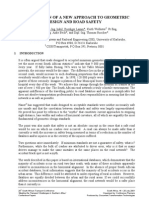
- Introduction of A New Approach To Geometric Design and Road SafetyDocument14 pagesIntroduction of A New Approach To Geometric Design and Road SafetyJorge SeverinoNo ratings yet
- Manto Carlo MethodDocument9 pagesManto Carlo MethodSri KanthNo ratings yet
- Peltola Accident Models PaperDocument8 pagesPeltola Accident Models PaperMd Didarul AlamNo ratings yet
- Accidents Prediction Model Based On Speed Reduction On Spanish Two-Lane Rural HighwaysDocument9 pagesAccidents Prediction Model Based On Speed Reduction On Spanish Two-Lane Rural HighwaysJEFERSON JOSEPH CONTRERAS CELEDONNo ratings yet
- Leeds City Council Lengths For Concern 2014Document82 pagesLeeds City Council Lengths For Concern 2014John BaronNo ratings yet
- Ingenieria VialDocument13 pagesIngenieria VialMauricio Nova DuranNo ratings yet
- Impact of Trac Congestion On Road Accidents: A Spatial Analysis of The M25 Motorway in EnglandDocument23 pagesImpact of Trac Congestion On Road Accidents: A Spatial Analysis of The M25 Motorway in EnglandSmith SongkhlaNo ratings yet
- Comparison of Spatial Methods For Measuring Road Accident Hotspots': A Case Study of LondonDocument10 pagesComparison of Spatial Methods For Measuring Road Accident Hotspots': A Case Study of LondonM MushtaqNo ratings yet
- A Crash-Prediction Model For Multilane RoadsDocument14 pagesA Crash-Prediction Model For Multilane RoadsTanisadanNo ratings yet
- in Engineering in Dependability of Computer Systems and Networks PDFDocument9 pagesin Engineering in Dependability of Computer Systems and Networks PDFMarioSalazarNo ratings yet
- Intersection Traffic Accident Data Modeling and Analysis: Empirical Study in City of Norfolk, VaDocument6 pagesIntersection Traffic Accident Data Modeling and Analysis: Empirical Study in City of Norfolk, VaHasiburRahmanNo ratings yet
- Doelp, A.J. (1990) - Requirements For Safe Overtaking On Two-Lane Rural RoadsDocument10 pagesDoelp, A.J. (1990) - Requirements For Safe Overtaking On Two-Lane Rural RoadseduardomcNo ratings yet
- Development of Accident Prediction Models For Rural Highway Intersections - OhDocument10 pagesDevelopment of Accident Prediction Models For Rural Highway Intersections - OhMd Didarul AlamNo ratings yet
- Modelling Congestion On Urban Roads Using Speed Profile DataDocument10 pagesModelling Congestion On Urban Roads Using Speed Profile DataSuhas RamachandraNo ratings yet
- The Relationship Between Road Characteristics and Speed Collected From Floating Car DataDocument10 pagesThe Relationship Between Road Characteristics and Speed Collected From Floating Car DataIzzy LiNo ratings yet
- The Effects of Drivers' Speed On The 20Document56 pagesThe Effects of Drivers' Speed On The 20vskywokervsNo ratings yet
- ISHC Final April 2006Document10 pagesISHC Final April 2006Manpreet SinghNo ratings yet
- Determination Unsignalized Intersection at KM 20 Jalan Batu Pahat-KluangDocument6 pagesDetermination Unsignalized Intersection at KM 20 Jalan Batu Pahat-KluangNurul RizalNo ratings yet
- Journal ReviewDocument5 pagesJournal ReviewItak AremanitaNo ratings yet
- A Decision Making System To Automatic Recognize of Traf C Accidents On The Basis of A GIS PlatformDocument8 pagesA Decision Making System To Automatic Recognize of Traf C Accidents On The Basis of A GIS PlatformIvana PamučarNo ratings yet
- Truong and Somenahalli 2011Document16 pagesTruong and Somenahalli 2011Brayden SooNo ratings yet
- Traffic Safety Assessment and Development of Predictive Models For Accidents On Rural Roads in EgyptDocument15 pagesTraffic Safety Assessment and Development of Predictive Models For Accidents On Rural Roads in EgyptPunya SiapaNo ratings yet
- 011 - Bambang Haryadi DKKDocument10 pages011 - Bambang Haryadi DKKHeri AdiNo ratings yet
- Analisis y PrevencionDocument13 pagesAnalisis y PrevencionChristianEdinsonNo ratings yet
- Lesson 10a. Bicycle Tracks and LanesDocument15 pagesLesson 10a. Bicycle Tracks and LanesChesang DennisNo ratings yet
- Analysis of The Efficiency of Urban Commercial Vehicle Toursdata Collection, Methodology, and Policy ImplicationsDocument19 pagesAnalysis of The Efficiency of Urban Commercial Vehicle Toursdata Collection, Methodology, and Policy ImplicationstaniNo ratings yet
- Importance and Exposure in Road Network Vulnerability AnalysisDocument24 pagesImportance and Exposure in Road Network Vulnerability AnalysisMehrdad ZeyghamNo ratings yet
- Don't OpenDocument22 pagesDon't OpenAlona Mae DulayNo ratings yet
- GIS AccidentsDocument5 pagesGIS Accidentsali110011No ratings yet
- Green Wave Traffic Optimization - A Survey: Warberg, Andreas Larsen, Jesper Jørgensen, Rene MunkDocument24 pagesGreen Wave Traffic Optimization - A Survey: Warberg, Andreas Larsen, Jesper Jørgensen, Rene MunkSimona NicoletaNo ratings yet
- 1 s2.0 S1877042814041706 MainDocument9 pages1 s2.0 S1877042814041706 MainParsa AstaneNo ratings yet
- Application of Highway Safety Manual To Italia - 2012 - Procedia - Social and BeDocument10 pagesApplication of Highway Safety Manual To Italia - 2012 - Procedia - Social and BeTONY VILCHEZ YARIHUAMANNo ratings yet
- Draft: Sector PlanDocument50 pagesDraft: Sector PlanM-NCPPCNo ratings yet
- Summary of Thesis - Nay Lwin Hein - PDFDocument2 pagesSummary of Thesis - Nay Lwin Hein - PDFNay Lwin HeinNo ratings yet
- Draft: Sector PlanDocument50 pagesDraft: Sector PlanM-NCPPCNo ratings yet
- Identifying The Principal Factors Influencing Traffic Safety On Interstate HighwaysDocument10 pagesIdentifying The Principal Factors Influencing Traffic Safety On Interstate HighwaysNoel S. De Juan Jr.No ratings yet
- 400 Bad Request 400 Bad Request Nginx/1.2.9Document12 pages400 Bad Request 400 Bad Request Nginx/1.2.9sevda_p85No ratings yet
- Black Spot Study and Accident Prediction Model Using Multiple Liner Regression PDFDocument16 pagesBlack Spot Study and Accident Prediction Model Using Multiple Liner Regression PDFBasilNo ratings yet
- Survey: of Socio-EconomicDocument10 pagesSurvey: of Socio-EconomicRobin TripathiNo ratings yet
- Draft: Sector PlanDocument50 pagesDraft: Sector PlanM-NCPPCNo ratings yet
- Literature Review On Accident Studies atDocument3 pagesLiterature Review On Accident Studies atGedion Woldesenbet0% (1)
- Index Coding-Based Data Exchange in A Vehicular Network JunctionDocument5 pagesIndex Coding-Based Data Exchange in A Vehicular Network Junctionlouai00No ratings yet
- Ambrs ROAD SAFETY EVALUATION USING TRAFFIC CONFLICTS PILOT PDFDocument8 pagesAmbrs ROAD SAFETY EVALUATION USING TRAFFIC CONFLICTS PILOT PDFramadan1978No ratings yet
- Development of Continuous Speed Profile Using GPS at Johor Federal Roads F0050Document6 pagesDevelopment of Continuous Speed Profile Using GPS at Johor Federal Roads F0050Iman AriefNo ratings yet
- Bicycle Tracks and Lanes: A Before-After Study: January 2008Document16 pagesBicycle Tracks and Lanes: A Before-After Study: January 2008RazvanMolieNo ratings yet
- Literature ReviewDocument11 pagesLiterature ReviewRegie Wengkyu HugoNo ratings yet
- Cocept Note - Kafale GonfaDocument6 pagesCocept Note - Kafale GonfaSamson YohannesNo ratings yet
- Ijmet: ©iaemeDocument6 pagesIjmet: ©iaemeIAEME PublicationNo ratings yet
- Traffic Engineering Road Safety - A Practitioner's Guide Kw. Ogden Department of Civil Engineefung Monash UniversityDocument108 pagesTraffic Engineering Road Safety - A Practitioner's Guide Kw. Ogden Department of Civil Engineefung Monash UniversityEman AgiusNo ratings yet
- Lee 2008Document9 pagesLee 2008wahyu rianNo ratings yet
- Representación de La InformaciónDocument16 pagesRepresentación de La InformaciónTatianaMuñozNo ratings yet
- Use of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysDocument19 pagesUse of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysIndra PanggaloNo ratings yet
- A Queueing Based Traffic Flow ModelDocument23 pagesA Queueing Based Traffic Flow ModelTanuj VermaNo ratings yet
- Is OSM Good Enough For Vehicle Routing? A Study Comparing Street Networks in ViennaDocument16 pagesIs OSM Good Enough For Vehicle Routing? A Study Comparing Street Networks in ViennaFamdardNo ratings yet
- Abdel-Aty and Pande2005Document12 pagesAbdel-Aty and Pande2005William SasakiNo ratings yet
- Black Spot Determination of Traffic Accident Locations and Its Spatial Association Characteristic Analysis Based On GISDocument10 pagesBlack Spot Determination of Traffic Accident Locations and Its Spatial Association Characteristic Analysis Based On GISDinesh PoudelNo ratings yet
- Safety Assessment of Urban Un-Signalized Intersections Using Conflict Analysis TechniqueDocument19 pagesSafety Assessment of Urban Un-Signalized Intersections Using Conflict Analysis Techniqueashutoshiitbhu2019No ratings yet
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryFrom EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryNo ratings yet
- Retaining Wall - 10MDocument1 pageRetaining Wall - 10MManupriya KapleshNo ratings yet
- Our Busy Roads: Tujuan PembelajaranDocument3 pagesOur Busy Roads: Tujuan PembelajaranMuhamad Rava RindikaNo ratings yet
- Neighborhood Environment Walkability ScaleDocument7 pagesNeighborhood Environment Walkability Scalee_marroquinNo ratings yet
- Affidavit of Damage To VehicleDocument2 pagesAffidavit of Damage To Vehiclevhiena may estrelladoNo ratings yet
- Road Safety PlanDocument22 pagesRoad Safety PlanSumrit JoshiNo ratings yet
- Integrated Design Project: Highway and Transport GroupDocument32 pagesIntegrated Design Project: Highway and Transport GroupDarren ÐavençNo ratings yet
- Irc Gov in 002 1968Document18 pagesIrc Gov in 002 1968varunsingh214761No ratings yet
- Its Status & Plans in Transitional & Developing CountriesDocument11 pagesIts Status & Plans in Transitional & Developing CountriesEngr Anwar ZaibNo ratings yet
- VI Semester Airport and Railway EngineeringDocument2 pagesVI Semester Airport and Railway EngineeringdineshNo ratings yet
- Depo Faros-R CV DA 4Document5 pagesDepo Faros-R CV DA 4ivanxpeNo ratings yet
- Number Coding Scheme in Baguio CityDocument1 pageNumber Coding Scheme in Baguio CityMonique AcostaNo ratings yet
- Chapter 3 Traffic Operational Analysis TechniquesDocument18 pagesChapter 3 Traffic Operational Analysis Techniqueslemi asefaNo ratings yet
- Comparative Study On Turbo-Roundabout and Spiral RoundaboutsDocument20 pagesComparative Study On Turbo-Roundabout and Spiral RoundaboutsOleg PlinschiNo ratings yet
- Rate AnalysisDocument46 pagesRate AnalysisbulganinganguliNo ratings yet
- Dissertation On Road AccidentDocument6 pagesDissertation On Road AccidentPapersWritingServiceUK100% (1)
- Transportation EngineeringDocument35 pagesTransportation EngineeringPurvesh patelNo ratings yet
- SMV RegulationDocument12 pagesSMV Regulationcyberlove160027009No ratings yet
- HDM - 05 Urban Rural FreewayDocument30 pagesHDM - 05 Urban Rural Freewayna naserNo ratings yet
- Lateral and Vertical Clearances Underpasses Vehicular TrafficDocument11 pagesLateral and Vertical Clearances Underpasses Vehicular TrafficharivennelaNo ratings yet
- Republic Act 10913Document1 pageRepublic Act 10913AnthonyNo ratings yet
- TONGOD-PINANGAH Project DescriptionDocument4 pagesTONGOD-PINANGAH Project DescriptionPenjejakAwanNo ratings yet
- Traffic Rules Tests - 103392Document1 pageTraffic Rules Tests - 103392Eva SkalováNo ratings yet
- Class 26 - Pavement Management SystemDocument77 pagesClass 26 - Pavement Management SystemUsman Latif100% (1)
- Presentation On RoadDocument23 pagesPresentation On RoadKapil PantNo ratings yet
- Cecily Jones Lab2Document3 pagesCecily Jones Lab2api-535570621No ratings yet






















































































Download as pdf or txt
You might also like
- Obeying and Observing Traffic Rules and RegulationsDocument18 pagesObeying and Observing Traffic Rules and Regulationsflorence baliwang64% (11)
- PWA Standard DetailsDocument206 pagesPWA Standard DetailsHaytham Tantawy73% (15)
- Highway Link DesignDocument77 pagesHighway Link Designalan toomeyNo ratings yet
- Private VehiCLE OWNERSHIP Vs Public TransportDocument29 pagesPrivate VehiCLE OWNERSHIP Vs Public Transportuhope100% (7)
- 2010 - Nevada DOT Standard Plans PDFDocument279 pages2010 - Nevada DOT Standard Plans PDFChunyu Zhang0% (1)
- Accident Prediction Models For Road NetworksDocument11 pagesAccident Prediction Models For Road NetworksMd Didarul AlamNo ratings yet
- MNGKJHTF, KDocument9 pagesMNGKJHTF, KchuniNo ratings yet
- Introduction of A New Approach To Geometric Design and Road SafetyDocument14 pagesIntroduction of A New Approach To Geometric Design and Road SafetyJorge SeverinoNo ratings yet
- Manto Carlo MethodDocument9 pagesManto Carlo MethodSri KanthNo ratings yet
- Peltola Accident Models PaperDocument8 pagesPeltola Accident Models PaperMd Didarul AlamNo ratings yet
- Accidents Prediction Model Based On Speed Reduction On Spanish Two-Lane Rural HighwaysDocument9 pagesAccidents Prediction Model Based On Speed Reduction On Spanish Two-Lane Rural HighwaysJEFERSON JOSEPH CONTRERAS CELEDONNo ratings yet
- Leeds City Council Lengths For Concern 2014Document82 pagesLeeds City Council Lengths For Concern 2014John BaronNo ratings yet
- Ingenieria VialDocument13 pagesIngenieria VialMauricio Nova DuranNo ratings yet
- Impact of Trac Congestion On Road Accidents: A Spatial Analysis of The M25 Motorway in EnglandDocument23 pagesImpact of Trac Congestion On Road Accidents: A Spatial Analysis of The M25 Motorway in EnglandSmith SongkhlaNo ratings yet
- Comparison of Spatial Methods For Measuring Road Accident Hotspots': A Case Study of LondonDocument10 pagesComparison of Spatial Methods For Measuring Road Accident Hotspots': A Case Study of LondonM MushtaqNo ratings yet
- A Crash-Prediction Model For Multilane RoadsDocument14 pagesA Crash-Prediction Model For Multilane RoadsTanisadanNo ratings yet
- in Engineering in Dependability of Computer Systems and Networks PDFDocument9 pagesin Engineering in Dependability of Computer Systems and Networks PDFMarioSalazarNo ratings yet
- Intersection Traffic Accident Data Modeling and Analysis: Empirical Study in City of Norfolk, VaDocument6 pagesIntersection Traffic Accident Data Modeling and Analysis: Empirical Study in City of Norfolk, VaHasiburRahmanNo ratings yet
- Doelp, A.J. (1990) - Requirements For Safe Overtaking On Two-Lane Rural RoadsDocument10 pagesDoelp, A.J. (1990) - Requirements For Safe Overtaking On Two-Lane Rural RoadseduardomcNo ratings yet
- Development of Accident Prediction Models For Rural Highway Intersections - OhDocument10 pagesDevelopment of Accident Prediction Models For Rural Highway Intersections - OhMd Didarul AlamNo ratings yet
- Modelling Congestion On Urban Roads Using Speed Profile DataDocument10 pagesModelling Congestion On Urban Roads Using Speed Profile DataSuhas RamachandraNo ratings yet
- The Relationship Between Road Characteristics and Speed Collected From Floating Car DataDocument10 pagesThe Relationship Between Road Characteristics and Speed Collected From Floating Car DataIzzy LiNo ratings yet
- The Effects of Drivers' Speed On The 20Document56 pagesThe Effects of Drivers' Speed On The 20vskywokervsNo ratings yet
- ISHC Final April 2006Document10 pagesISHC Final April 2006Manpreet SinghNo ratings yet
- Determination Unsignalized Intersection at KM 20 Jalan Batu Pahat-KluangDocument6 pagesDetermination Unsignalized Intersection at KM 20 Jalan Batu Pahat-KluangNurul RizalNo ratings yet
- Journal ReviewDocument5 pagesJournal ReviewItak AremanitaNo ratings yet
- A Decision Making System To Automatic Recognize of Traf C Accidents On The Basis of A GIS PlatformDocument8 pagesA Decision Making System To Automatic Recognize of Traf C Accidents On The Basis of A GIS PlatformIvana PamučarNo ratings yet
- Truong and Somenahalli 2011Document16 pagesTruong and Somenahalli 2011Brayden SooNo ratings yet
- Traffic Safety Assessment and Development of Predictive Models For Accidents On Rural Roads in EgyptDocument15 pagesTraffic Safety Assessment and Development of Predictive Models For Accidents On Rural Roads in EgyptPunya SiapaNo ratings yet
- 011 - Bambang Haryadi DKKDocument10 pages011 - Bambang Haryadi DKKHeri AdiNo ratings yet
- Analisis y PrevencionDocument13 pagesAnalisis y PrevencionChristianEdinsonNo ratings yet
- Lesson 10a. Bicycle Tracks and LanesDocument15 pagesLesson 10a. Bicycle Tracks and LanesChesang DennisNo ratings yet
- Analysis of The Efficiency of Urban Commercial Vehicle Toursdata Collection, Methodology, and Policy ImplicationsDocument19 pagesAnalysis of The Efficiency of Urban Commercial Vehicle Toursdata Collection, Methodology, and Policy ImplicationstaniNo ratings yet
- Importance and Exposure in Road Network Vulnerability AnalysisDocument24 pagesImportance and Exposure in Road Network Vulnerability AnalysisMehrdad ZeyghamNo ratings yet
- Don't OpenDocument22 pagesDon't OpenAlona Mae DulayNo ratings yet
- GIS AccidentsDocument5 pagesGIS Accidentsali110011No ratings yet
- Green Wave Traffic Optimization - A Survey: Warberg, Andreas Larsen, Jesper Jørgensen, Rene MunkDocument24 pagesGreen Wave Traffic Optimization - A Survey: Warberg, Andreas Larsen, Jesper Jørgensen, Rene MunkSimona NicoletaNo ratings yet
- 1 s2.0 S1877042814041706 MainDocument9 pages1 s2.0 S1877042814041706 MainParsa AstaneNo ratings yet
- Application of Highway Safety Manual To Italia - 2012 - Procedia - Social and BeDocument10 pagesApplication of Highway Safety Manual To Italia - 2012 - Procedia - Social and BeTONY VILCHEZ YARIHUAMANNo ratings yet
- Draft: Sector PlanDocument50 pagesDraft: Sector PlanM-NCPPCNo ratings yet
- Summary of Thesis - Nay Lwin Hein - PDFDocument2 pagesSummary of Thesis - Nay Lwin Hein - PDFNay Lwin HeinNo ratings yet
- Draft: Sector PlanDocument50 pagesDraft: Sector PlanM-NCPPCNo ratings yet
- Identifying The Principal Factors Influencing Traffic Safety On Interstate HighwaysDocument10 pagesIdentifying The Principal Factors Influencing Traffic Safety On Interstate HighwaysNoel S. De Juan Jr.No ratings yet
- 400 Bad Request 400 Bad Request Nginx/1.2.9Document12 pages400 Bad Request 400 Bad Request Nginx/1.2.9sevda_p85No ratings yet
- Black Spot Study and Accident Prediction Model Using Multiple Liner Regression PDFDocument16 pagesBlack Spot Study and Accident Prediction Model Using Multiple Liner Regression PDFBasilNo ratings yet
- Survey: of Socio-EconomicDocument10 pagesSurvey: of Socio-EconomicRobin TripathiNo ratings yet
- Draft: Sector PlanDocument50 pagesDraft: Sector PlanM-NCPPCNo ratings yet
- Literature Review On Accident Studies atDocument3 pagesLiterature Review On Accident Studies atGedion Woldesenbet0% (1)
- Index Coding-Based Data Exchange in A Vehicular Network JunctionDocument5 pagesIndex Coding-Based Data Exchange in A Vehicular Network Junctionlouai00No ratings yet
- Ambrs ROAD SAFETY EVALUATION USING TRAFFIC CONFLICTS PILOT PDFDocument8 pagesAmbrs ROAD SAFETY EVALUATION USING TRAFFIC CONFLICTS PILOT PDFramadan1978No ratings yet
- Development of Continuous Speed Profile Using GPS at Johor Federal Roads F0050Document6 pagesDevelopment of Continuous Speed Profile Using GPS at Johor Federal Roads F0050Iman AriefNo ratings yet
- Bicycle Tracks and Lanes: A Before-After Study: January 2008Document16 pagesBicycle Tracks and Lanes: A Before-After Study: January 2008RazvanMolieNo ratings yet
- Literature ReviewDocument11 pagesLiterature ReviewRegie Wengkyu HugoNo ratings yet
- Cocept Note - Kafale GonfaDocument6 pagesCocept Note - Kafale GonfaSamson YohannesNo ratings yet
- Ijmet: ©iaemeDocument6 pagesIjmet: ©iaemeIAEME PublicationNo ratings yet
- Traffic Engineering Road Safety - A Practitioner's Guide Kw. Ogden Department of Civil Engineefung Monash UniversityDocument108 pagesTraffic Engineering Road Safety - A Practitioner's Guide Kw. Ogden Department of Civil Engineefung Monash UniversityEman AgiusNo ratings yet
- Lee 2008Document9 pagesLee 2008wahyu rianNo ratings yet
- Representación de La InformaciónDocument16 pagesRepresentación de La InformaciónTatianaMuñozNo ratings yet
- Use of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysDocument19 pagesUse of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysIndra PanggaloNo ratings yet
- A Queueing Based Traffic Flow ModelDocument23 pagesA Queueing Based Traffic Flow ModelTanuj VermaNo ratings yet
- Is OSM Good Enough For Vehicle Routing? A Study Comparing Street Networks in ViennaDocument16 pagesIs OSM Good Enough For Vehicle Routing? A Study Comparing Street Networks in ViennaFamdardNo ratings yet
- Abdel-Aty and Pande2005Document12 pagesAbdel-Aty and Pande2005William SasakiNo ratings yet
- Black Spot Determination of Traffic Accident Locations and Its Spatial Association Characteristic Analysis Based On GISDocument10 pagesBlack Spot Determination of Traffic Accident Locations and Its Spatial Association Characteristic Analysis Based On GISDinesh PoudelNo ratings yet
- Safety Assessment of Urban Un-Signalized Intersections Using Conflict Analysis TechniqueDocument19 pagesSafety Assessment of Urban Un-Signalized Intersections Using Conflict Analysis Techniqueashutoshiitbhu2019No ratings yet
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryFrom EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryNo ratings yet
- Retaining Wall - 10MDocument1 pageRetaining Wall - 10MManupriya KapleshNo ratings yet
- Our Busy Roads: Tujuan PembelajaranDocument3 pagesOur Busy Roads: Tujuan PembelajaranMuhamad Rava RindikaNo ratings yet
- Neighborhood Environment Walkability ScaleDocument7 pagesNeighborhood Environment Walkability Scalee_marroquinNo ratings yet
- Affidavit of Damage To VehicleDocument2 pagesAffidavit of Damage To Vehiclevhiena may estrelladoNo ratings yet
- Road Safety PlanDocument22 pagesRoad Safety PlanSumrit JoshiNo ratings yet
- Integrated Design Project: Highway and Transport GroupDocument32 pagesIntegrated Design Project: Highway and Transport GroupDarren ÐavençNo ratings yet
- Irc Gov in 002 1968Document18 pagesIrc Gov in 002 1968varunsingh214761No ratings yet
- Its Status & Plans in Transitional & Developing CountriesDocument11 pagesIts Status & Plans in Transitional & Developing CountriesEngr Anwar ZaibNo ratings yet
- VI Semester Airport and Railway EngineeringDocument2 pagesVI Semester Airport and Railway EngineeringdineshNo ratings yet
- Depo Faros-R CV DA 4Document5 pagesDepo Faros-R CV DA 4ivanxpeNo ratings yet
- Number Coding Scheme in Baguio CityDocument1 pageNumber Coding Scheme in Baguio CityMonique AcostaNo ratings yet
- Chapter 3 Traffic Operational Analysis TechniquesDocument18 pagesChapter 3 Traffic Operational Analysis Techniqueslemi asefaNo ratings yet
- Comparative Study On Turbo-Roundabout and Spiral RoundaboutsDocument20 pagesComparative Study On Turbo-Roundabout and Spiral RoundaboutsOleg PlinschiNo ratings yet
- Rate AnalysisDocument46 pagesRate AnalysisbulganinganguliNo ratings yet
- Dissertation On Road AccidentDocument6 pagesDissertation On Road AccidentPapersWritingServiceUK100% (1)
- Transportation EngineeringDocument35 pagesTransportation EngineeringPurvesh patelNo ratings yet
- SMV RegulationDocument12 pagesSMV Regulationcyberlove160027009No ratings yet
- HDM - 05 Urban Rural FreewayDocument30 pagesHDM - 05 Urban Rural Freewayna naserNo ratings yet
- Lateral and Vertical Clearances Underpasses Vehicular TrafficDocument11 pagesLateral and Vertical Clearances Underpasses Vehicular TrafficharivennelaNo ratings yet
- Republic Act 10913Document1 pageRepublic Act 10913AnthonyNo ratings yet
- TONGOD-PINANGAH Project DescriptionDocument4 pagesTONGOD-PINANGAH Project DescriptionPenjejakAwanNo ratings yet
- Traffic Rules Tests - 103392Document1 pageTraffic Rules Tests - 103392Eva SkalováNo ratings yet
- Class 26 - Pavement Management SystemDocument77 pagesClass 26 - Pavement Management SystemUsman Latif100% (1)
- Presentation On RoadDocument23 pagesPresentation On RoadKapil PantNo ratings yet
- Cecily Jones Lab2Document3 pagesCecily Jones Lab2api-535570621No ratings yet