Download as pdf or txt
You might also like
- Electrical Drawings Checklist UpdatedDocument13 pagesElectrical Drawings Checklist UpdatedMehboob Alam100% (1)
- Maximizing Power System Loadability by Optimal Allocation of SVC Using Mixed Integer Linear ProgrammingDocument7 pagesMaximizing Power System Loadability by Optimal Allocation of SVC Using Mixed Integer Linear ProgrammingMohamed MansourNo ratings yet
- Sizing of Capacitors Placed Ieee 735 PDFDocument9 pagesSizing of Capacitors Placed Ieee 735 PDFEnrique Anchundia GuerreroNo ratings yet
- Optimal Sizing of Capacitors Placed On A Radial Distribution SystemDocument9 pagesOptimal Sizing of Capacitors Placed On A Radial Distribution SystemghotourNo ratings yet
- CIRED2009 0518 PaperDocument4 pagesCIRED2009 0518 PapersrivaishnaviNo ratings yet
- Modelling and Simulation of Power SystemsDocument15 pagesModelling and Simulation of Power SystemsJhon Edgar Quisiyupanqui CusiquispeNo ratings yet
- PUCDocument13 pagesPUCMohd Mohsin KhanNo ratings yet
- An Efficient Approach For Capacitor Sizing and Location On A Radial Distribution System Using Artificial Intelligence TechniqueDocument5 pagesAn Efficient Approach For Capacitor Sizing and Location On A Radial Distribution System Using Artificial Intelligence Techniquesahastra244122No ratings yet
- Función Real Base PS Feb 07Document9 pagesFunción Real Base PS Feb 07freddyriveraNo ratings yet
- Energy Conversion and Management: S.M. AithalDocument7 pagesEnergy Conversion and Management: S.M. AithalSravan KumarNo ratings yet
- Modelling of OHL and UG PDFDocument6 pagesModelling of OHL and UG PDFCarlos Lino Rojas AgüeroNo ratings yet
- Active Front-End Rectifier Modelling Using Dynamic Phasors For More-Electric Aircraft Applications - IET - V5Document24 pagesActive Front-End Rectifier Modelling Using Dynamic Phasors For More-Electric Aircraft Applications - IET - V5Nuradin JemalNo ratings yet
- A Modeling and Analysis Method For Fractional-Order DCDC ConvertersDocument12 pagesA Modeling and Analysis Method For Fractional-Order DCDC ConvertersHoussem GrachaNo ratings yet
- Optimal Placement of Wind Power Plants in Transmission PowerDocument20 pagesOptimal Placement of Wind Power Plants in Transmission PowerThanh Thắng VõNo ratings yet
- 6open Circuit Fault Tolerance Method For Three Level Hybrid Active Neutral Point Clamped ConvertersDocument23 pages6open Circuit Fault Tolerance Method For Three Level Hybrid Active Neutral Point Clamped Convertersyasin bayatNo ratings yet
- Fulltext01Document154 pagesFulltext01asemNo ratings yet
- A Generalized State-Space Averaged Model of The Three-Level NPC Converter For Systematic DC Voltage BalancerDocument10 pagesA Generalized State-Space Averaged Model of The Three-Level NPC Converter For Systematic DC Voltage Balancersherif_helmyNo ratings yet
- Power System EquivalentsDocument6 pagesPower System Equivalentsdallisrinivas14No ratings yet
- A Genetic Algorithm Approach For Solving Ac-Dc Optimal Power Flow ProblemDocument14 pagesA Genetic Algorithm Approach For Solving Ac-Dc Optimal Power Flow ProblemJoe RanteNo ratings yet
- IET Template PDFDocument9 pagesIET Template PDFdebasishmee5808No ratings yet
- Complex PUDocument8 pagesComplex PUVinicius MunizNo ratings yet
- Dialnet FlujoDePotenciaOptimoDeRamasParaRedesDCConEstructu 8358183Document22 pagesDialnet FlujoDePotenciaOptimoDeRamasParaRedesDCConEstructu 8358183john2000carvajalNo ratings yet
- Multi Objective 11Document10 pagesMulti Objective 11ragvshahNo ratings yet
- A Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter Models Ml12088a497Document7 pagesA Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter Models Ml12088a497cristian1961No ratings yet
- A Comparison of the AC and DC Power Flow Models for LMP Calculationsو Overbye, Cheng, SunDocument9 pagesA Comparison of the AC and DC Power Flow Models for LMP Calculationsو Overbye, Cheng, SunhoseinkhazaeiNo ratings yet
- Progress Report of Minor ProjectDocument32 pagesProgress Report of Minor ProjectVaibhav DahiyaNo ratings yet
- Tran Quang Tho - KDDDocument46 pagesTran Quang Tho - KDDTuấn ĐặngNo ratings yet
- Discrete Dynamics in Nature and Society: Hindawi Publishing CorporationDocument7 pagesDiscrete Dynamics in Nature and Society: Hindawi Publishing CorporationbillywoodsNo ratings yet
- Accepted Manuscript - Schenker Et Al - Application and Improvement of A Direct Method OptimizationDocument19 pagesAccepted Manuscript - Schenker Et Al - Application and Improvement of A Direct Method OptimizationEzana EzanaNo ratings yet
- Capacitor Placement in Unbalanced Power SystemsDocument6 pagesCapacitor Placement in Unbalanced Power SystemsFabio NobNo ratings yet
- A High Performance Technique in Harmonic Omitting Based On Predictive Current Control of A Shunt Active Power FilterDocument7 pagesA High Performance Technique in Harmonic Omitting Based On Predictive Current Control of A Shunt Active Power FilterAndreeaNo ratings yet
- Study of Linear Models in Steady State Load Flow Analysis of Power SystemsDocument6 pagesStudy of Linear Models in Steady State Load Flow Analysis of Power SystemsAbdulrahmanNo ratings yet
- Literature Review of Power Flow AnalysisDocument8 pagesLiterature Review of Power Flow Analysisc5qdk8jn100% (1)
- Computer Application To The Piping Analysis Requirements of ASME Section III, Subscribe NB-3600Document12 pagesComputer Application To The Piping Analysis Requirements of ASME Section III, Subscribe NB-3600sateesh chandNo ratings yet
- Video PDFDocument9 pagesVideo PDFAlex ApazaNo ratings yet
- INTEGRATION, The VLSI Journal: Shu-Yi Wong, Chunhong ChenDocument14 pagesINTEGRATION, The VLSI Journal: Shu-Yi Wong, Chunhong ChenManpreet SinghNo ratings yet
- Loss ReductionDocument35 pagesLoss Reductionsolomon nchor akansakeNo ratings yet
- The Design and Use of Simplepower: A Cycle-Accurate Energy Estimation ToolDocument6 pagesThe Design and Use of Simplepower: A Cycle-Accurate Energy Estimation Tooltilottama_deoreNo ratings yet
- Optimal Network Reconfigurations in Distribution SystemsDocument8 pagesOptimal Network Reconfigurations in Distribution SystemsarathibujjiNo ratings yet
- Power Flow and Dynamic Optimal Power Flow Including Wind FarmsDocument6 pagesPower Flow and Dynamic Optimal Power Flow Including Wind FarmsMed Nassim KraimiaNo ratings yet
- Load Flow Analysis For A 220KV Line - Case StudyDocument12 pagesLoad Flow Analysis For A 220KV Line - Case StudyNmg KumarNo ratings yet
- Modeling and Characterizing Supercapacitors Using An Online MethodDocument11 pagesModeling and Characterizing Supercapacitors Using An Online MethodEdu Daryl MacerenNo ratings yet
- Chapter 2Document10 pagesChapter 2Rathore Yuvraj SinghNo ratings yet
- Thesis On Power System PDFDocument6 pagesThesis On Power System PDFvxjtklxff100% (2)
- A Comparison of The AC and DC Power Flow For LMP CalculationsDocument9 pagesA Comparison of The AC and DC Power Flow For LMP CalculationsrnmukerjeeNo ratings yet
- A Link Between EMTP RV and Flux3D For Transformer Energization StudiesDocument6 pagesA Link Between EMTP RV and Flux3D For Transformer Energization StudiesleivajNo ratings yet
- Hong 2015Document7 pagesHong 2015Mahad KhanNo ratings yet
- Kleinberg - ISCAS 09Document4 pagesKleinberg - ISCAS 09srdjaninnNo ratings yet
- A Modified Backward/forward Method For Fast Solving Radial Distribution NetworksDocument7 pagesA Modified Backward/forward Method For Fast Solving Radial Distribution NetworksItalo ChiarellaNo ratings yet
- POWERQDocument13 pagesPOWERQKGNo ratings yet
- Inductive Power Transfer Using LCC Compensation TopologyDocument3 pagesInductive Power Transfer Using LCC Compensation TopologyBinh VuNo ratings yet
- Three Phase PWM Rectifier ThesisDocument7 pagesThree Phase PWM Rectifier Thesisalanacartwrightnorman100% (2)
- A Practical Algorithm For Optimal Operation Management of Distribution Network Including Fuel Cell Power PlantsDocument19 pagesA Practical Algorithm For Optimal Operation Management of Distribution Network Including Fuel Cell Power PlantsFarouk KeniouNo ratings yet
- Application of Fuzzy Logic For Loss Reduction in A Transmission NetworkDocument22 pagesApplication of Fuzzy Logic For Loss Reduction in A Transmission NetworkOhanyelu Okeoma DanielNo ratings yet
- Distributed OPF AlgorithmDocument11 pagesDistributed OPF AlgorithmPradeep DauhareNo ratings yet
- Review of Power Flow Studies On Distribution Network With Distributed GenerationDocument7 pagesReview of Power Flow Studies On Distribution Network With Distributed GenerationAbdulrahmanNo ratings yet
- M691 Final Report (2011-2012) - Stochastic Power Grid ModelDocument6 pagesM691 Final Report (2011-2012) - Stochastic Power Grid ModelaortizperuNo ratings yet
- Psce ConferenceDocument96 pagesPsce ConferenceSeetharam MahanthiNo ratings yet
- Electric Power Systems Research: Distribution Power Ow Method Based On A Real Quasi-Symmetric MatrixDocument12 pagesElectric Power Systems Research: Distribution Power Ow Method Based On A Real Quasi-Symmetric MatrixSatishKumarInjetiNo ratings yet
- Stability Assessment of Power-Converter-Based AC Systems by LTP Theory: Eigenvalue Analysis and Harmonic Impedance EstimationDocument13 pagesStability Assessment of Power-Converter-Based AC Systems by LTP Theory: Eigenvalue Analysis and Harmonic Impedance EstimationLiz CastilloNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Websterspellingbookmethod (2) (1)Document167 pagesWebsterspellingbookmethod (2) (1)Israel Rom Olguín GuzmanNo ratings yet
- Lat Pulldown - Google SearchDocument1 pageLat Pulldown - Google SearchIsrael Rom Olguín GuzmanNo ratings yet
- LectNotes 2013-02-26Document5 pagesLectNotes 2013-02-26Israel Rom Olguín GuzmanNo ratings yet
- Rounding Errors LabDocument18 pagesRounding Errors LabIsrael Rom Olguín GuzmanNo ratings yet
- 72 Second HandDocument6 pages72 Second HandIsrael Rom Olguín GuzmanNo ratings yet
- Manual Current Transformer PCB - ZF Marine KrimpenDocument10 pagesManual Current Transformer PCB - ZF Marine KrimpenSuryadharma ListionoNo ratings yet
- Jasenko Kosorcic PDFDocument97 pagesJasenko Kosorcic PDFkotaNo ratings yet
- CPMDocument84 pagesCPMbiabamanbemanNo ratings yet
- Circuit Breaker Selection: NT06 To NT16 Fixed Circuit BreakersDocument19 pagesCircuit Breaker Selection: NT06 To NT16 Fixed Circuit BreakersRafatNo ratings yet
- 902 and 906 Compact Wheel Loader Electrical System: Machine Harness Connector and Component LocationsDocument2 pages902 and 906 Compact Wheel Loader Electrical System: Machine Harness Connector and Component LocationsGilvan JuniorNo ratings yet
- Triple-Multiband Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltDocument2 pagesTriple-Multiband Panel Dual Polarization Half-Power Beam Width Adjust. Electr. DowntiltestebanarcaNo ratings yet
- Mobile Charging Using MicrowavesDocument29 pagesMobile Charging Using MicrowavesRajashri BangeraNo ratings yet
- DLT5161 6Document3 pagesDLT5161 6Ren SalazarNo ratings yet
- Meditherm 3 Service Manual Part One of TwoDocument78 pagesMeditherm 3 Service Manual Part One of TwoelgatolocoNo ratings yet
- Two-Stage Vs One-Stage Design For A Bidirectional 400V 12V 6kW Auxiliary Power Module in Electric VehiclesDocument5 pagesTwo-Stage Vs One-Stage Design For A Bidirectional 400V 12V 6kW Auxiliary Power Module in Electric VehiclesKostas GekasNo ratings yet
- PWLS 1.0.1 ToolsDocument222 pagesPWLS 1.0.1 Toolspot100% (1)
- Muammer YILDIZ - : Update - 5-2010Document43 pagesMuammer YILDIZ - : Update - 5-2010bento broli100% (1)
- 15 014 F - Digipulse450i PDFDocument36 pages15 014 F - Digipulse450i PDFJohan ZraghozNo ratings yet
- Bulova Watch InformationDocument4 pagesBulova Watch InformationKevin LapriseNo ratings yet
- AnswersDocument3 pagesAnswersBowie PascualNo ratings yet
- Datasheet Argo Fet Battery Isolators With Alternator Energize Input ENDocument1 pageDatasheet Argo Fet Battery Isolators With Alternator Energize Input ENRabee AlademeNo ratings yet
- Data Download HAT560NC HAT560NBC V1.0 enDocument25 pagesData Download HAT560NC HAT560NBC V1.0 enArc Hie100% (1)
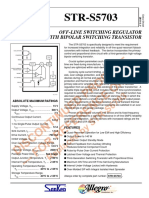
- Replaced by STR-S6703Document8 pagesReplaced by STR-S6703Raul Trujillo PNo ratings yet
- Hybrid Solar Grid System PDFDocument10 pagesHybrid Solar Grid System PDFAli Mukhtar ShigriNo ratings yet
- DTC B1182/19 Short in D Squib (2Nd Step) Circuit (To Ground)Document4 pagesDTC B1182/19 Short in D Squib (2Nd Step) Circuit (To Ground)Phang KumwingNo ratings yet
- Motan HT500 Set EngDocument11 pagesMotan HT500 Set EngJokyFlow RoNo ratings yet
- 20mm Size Metal Shaft Type: EC20A/RK203Document3 pages20mm Size Metal Shaft Type: EC20A/RK203thiagonunessNo ratings yet
- The Dresser-Rand Digital Governor SystemDocument5 pagesThe Dresser-Rand Digital Governor SystemdnavsirimaNo ratings yet
- DB1 Sounders Range Up To 113 DB (A) : Ex D, WeatherproofDocument2 pagesDB1 Sounders Range Up To 113 DB (A) : Ex D, WeatherproofAceel FitchNo ratings yet
- Digital Adaptive Optics With Interferometric Homodyne Encoding For Mitigating Atmospheric TurbulenceDocument15 pagesDigital Adaptive Optics With Interferometric Homodyne Encoding For Mitigating Atmospheric TurbulencePierre LuusNo ratings yet
- Application of Pscad-Emtp-Phase Shifter Modeling PDFDocument2 pagesApplication of Pscad-Emtp-Phase Shifter Modeling PDFusefi100% (1)
- Transistor - Transistor Logic (TTL) : I LowDocument17 pagesTransistor - Transistor Logic (TTL) : I LowwisamNo ratings yet
- Interfacing Adc 0808 To 8051 Micro ControllerDocument4 pagesInterfacing Adc 0808 To 8051 Micro Controllermatrixworld20No ratings yet
- Case Study - Power Quality Assessment and Mitigation at Steel PlantDocument8 pagesCase Study - Power Quality Assessment and Mitigation at Steel PlantBalaji DevathaNo ratings yet