Download as pdf or txt
You might also like
- UART Vs I2C Vs SPIDocument49 pagesUART Vs I2C Vs SPIKishore KishuNo ratings yet
- Mondeo MY10 - 5Document135 pagesMondeo MY10 - 5t77100% (2)
- Tutorial 4 - Business AnalyticsDocument14 pagesTutorial 4 - Business AnalyticsRobin RichardsonNo ratings yet
- Universal - Asynchronous - Receiver-Transmitter - ENDocument12 pagesUniversal - Asynchronous - Receiver-Transmitter - ENArturo Yanez S.G.No ratings yet
- Project Report UartDocument35 pagesProject Report UartSushant MongiaNo ratings yet
- Unit 5Document83 pagesUnit 5Vyshnavi Challa ObullaNo ratings yet
- B. Tech ProjectDocument52 pagesB. Tech ProjectSanthosh KammamNo ratings yet
- Unit 3 - Real World Interfacing With ARM7 Based Microcontroller - NotesDocument21 pagesUnit 3 - Real World Interfacing With ARM7 Based Microcontroller - Noteskbtug22384No ratings yet
- Design and Simulation of Uart Protocol Based On Verilog: B.Jeevan & M.NeerajaDocument4 pagesDesign and Simulation of Uart Protocol Based On Verilog: B.Jeevan & M.NeerajaTushar JainNo ratings yet
- UartDocument3 pagesUartGokul Kuthati100% (2)
- Project 2Document19 pagesProject 2Gaurav BaluNo ratings yet
- IJAER Ok 23043-23052Document10 pagesIJAER Ok 23043-23052vijayNo ratings yet
- UARTDocument27 pagesUARTNaveen Kumar100% (1)
- UART Communication: 2023EV167 Department of EceDocument7 pagesUART Communication: 2023EV167 Department of EceNITHYASREE K RNo ratings yet
- 2.design and Simulation of UART Serial Communication Module Based On VHDLDocument4 pages2.design and Simulation of UART Serial Communication Module Based On VHDLsattarsekharNo ratings yet
- Management-Design and Implementation of UART-Mahesh GiriDocument6 pagesManagement-Design and Implementation of UART-Mahesh GiriBESTJournalsNo ratings yet
- Serial Communication Rv01Document29 pagesSerial Communication Rv01sivaperumalNo ratings yet
- UART ProtocolDocument6 pagesUART Protocolvimal rajNo ratings yet
- MC C5.1 Serial Communication Rv01 - HC v19.1Document22 pagesMC C5.1 Serial Communication Rv01 - HC v19.1BodeaGabrielaNo ratings yet
- UART - Universal Asynchronous Receiver TransmitterDocument26 pagesUART - Universal Asynchronous Receiver TransmitterSivaprasad Reddy100% (2)
- USARTDocument6 pagesUSARTAnoop S PillaiNo ratings yet
- 8251Document5 pages8251Nihar PandaNo ratings yet
- Untitled PresentationDocument22 pagesUntitled PresentationNITHYASREE K RNo ratings yet
- 2023EV167 Department of Ece: UART CommunicationDocument7 pages2023EV167 Department of Ece: UART CommunicationNITHYASREE K RNo ratings yet
- TrainingDocument36 pagesTrainingPushkar VaidhyaNo ratings yet
- Uart, Spi & I2cDocument12 pagesUart, Spi & I2cdeepakacharya424No ratings yet
- UART Interface To A Computer Using ARM MicrocontrollerDocument8 pagesUART Interface To A Computer Using ARM Microcontrollerhariskhalid1100% (2)
- Synchronizing Two FPGA's For A Reliable Communication: Mercy SubaramanDocument4 pagesSynchronizing Two FPGA's For A Reliable Communication: Mercy SubaramanIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Experiment No. 1 (B) : Interfacing UART of LPC2148 To Transmit and Receive MessageDocument4 pagesExperiment No. 1 (B) : Interfacing UART of LPC2148 To Transmit and Receive MessageJohn FarandisNo ratings yet
- Es Notes Unit 5Document33 pagesEs Notes Unit 51balamanianNo ratings yet
- USARTDocument17 pagesUSARTtharunvenkataNo ratings yet
- 17CS563 Mod2Document24 pages17CS563 Mod2qwerty qwertyNo ratings yet
- Technical Seminar UARTDocument23 pagesTechnical Seminar UARTcharan467100% (1)
- Multi Channel UartDocument46 pagesMulti Channel UartSriram Pavan Kumar100% (1)
- Low Power UART Design For Serial Data CommunicationDocument21 pagesLow Power UART Design For Serial Data CommunicationSuman Gm100% (1)
- Embedded Systems Lab04 USARTDocument12 pagesEmbedded Systems Lab04 USARTAimanNo ratings yet
- Unit - 5 Serial CommunicationDocument51 pagesUnit - 5 Serial CommunicationM.venkateshNo ratings yet
- Unit 5 4Document23 pagesUnit 5 4Charan EswarNo ratings yet
- Serial Communication 2Document31 pagesSerial Communication 2jaigodara100% (1)
- 5.UART Serial Communication Module Design and SimulationDocument4 pages5.UART Serial Communication Module Design and Simulationvenkatahari babuNo ratings yet
- Embedded Systems Communication ProtocolDocument7 pagesEmbedded Systems Communication ProtocolYeabsera YismasewaNo ratings yet
- Transmission Modes: Chapter - 3Document8 pagesTransmission Modes: Chapter - 3lvsaruNo ratings yet
- Chapter 4Document30 pagesChapter 4udgam pandeyNo ratings yet
- Unit - 4: 4.1. Serial Data Communication - BasicsDocument16 pagesUnit - 4: 4.1. Serial Data Communication - BasicsRAJU VALLEPUNo ratings yet
- Universal Asynchronous ReceiverDocument4 pagesUniversal Asynchronous Receiversribha07No ratings yet
- Embedded USARTDocument27 pagesEmbedded USARTnorahussiniyNo ratings yet
- 8251 UsartDocument32 pages8251 UsartVedant BohraNo ratings yet
- Microsoft Word - UartDocument5 pagesMicrosoft Word - UartJoyal PatelNo ratings yet
- UART in LPC2148 ARM7 MicrocontrollerDocument8 pagesUART in LPC2148 ARM7 Microcontrollerrudra_1No ratings yet
- UART - A Hardware Communication Protocol Understanding Universal Asynchronous Receiver - Transmitter - Analog DevicesDocument9 pagesUART - A Hardware Communication Protocol Understanding Universal Asynchronous Receiver - Transmitter - Analog DevicesBiancaa RNo ratings yet
- Serial Communication in AVRDocument35 pagesSerial Communication in AVRgopalgeniusNo ratings yet
- Serial One 20Document18 pagesSerial One 20dominique fortierNo ratings yet
- Universal Asynchronous Receiver Transmitter (UART)Document38 pagesUniversal Asynchronous Receiver Transmitter (UART)Chandresh Trivedi100% (1)
- UARTDocument17 pagesUARTR INI BHANDARINo ratings yet
- "Universal Asynchronous Receiver and Transmitter" (UART) : A Project Report OnDocument24 pages"Universal Asynchronous Receiver and Transmitter" (UART) : A Project Report Ondasari himajaNo ratings yet
- Slides Lezione 7-2 Introduction To Uart CommunicationDocument6 pagesSlides Lezione 7-2 Introduction To Uart CommunicationChampu LaalNo ratings yet
- Serial Communication - Usart, Uart, Rs232, Usb, Spi, I2c, TTLDocument1 pageSerial Communication - Usart, Uart, Rs232, Usb, Spi, I2c, TTLvedhh100% (2)
- VHDL Implementation of UART Module Using FSM: Gaurav Verma, Vishal Rajput, Jashandeep SinghDocument17 pagesVHDL Implementation of UART Module Using FSM: Gaurav Verma, Vishal Rajput, Jashandeep SinghANIKET SAHANo ratings yet
- RTL Design of UART ProtocolDocument3 pagesRTL Design of UART ProtocolAnji medidiNo ratings yet
- PCI Express WikiDocument19 pagesPCI Express WikirockymaxdeemannNo ratings yet
- PCIe Basics OverviewDocument50 pagesPCIe Basics Overviewrockymaxdeemann100% (1)
- SpiDocument21 pagesSpirockymaxdeemannNo ratings yet
- AN3947 DaisyChaining SPI DevicesDocument8 pagesAN3947 DaisyChaining SPI DevicesrockymaxdeemannNo ratings yet
- Understanding Linear Feedback Shift Registers - The Easy WayDocument3 pagesUnderstanding Linear Feedback Shift Registers - The Easy WayrockymaxdeemannNo ratings yet
- Serialata 10 ADocument311 pagesSerialata 10 ArockymaxdeemannNo ratings yet
- Serialata 10 ADocument311 pagesSerialata 10 ArockymaxdeemannNo ratings yet
- Manage Tablespaces in A Container Database (CDB) and Pluggable Database (PDB)Document3 pagesManage Tablespaces in A Container Database (CDB) and Pluggable Database (PDB)Ahmed NagyNo ratings yet
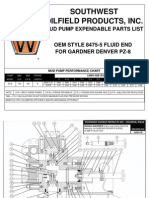
- Oem Gardner Denver Pz-8Document8 pagesOem Gardner Denver Pz-8caballero_tigreNo ratings yet
- Lecture24 25 SubnettingDocument46 pagesLecture24 25 SubnettingFiroz kumar100% (2)
- OmniSwitch 6450-24-48 Datasheet enDocument10 pagesOmniSwitch 6450-24-48 Datasheet enrenuNo ratings yet
- Pfe Training AvDocument20 pagesPfe Training AvpankajNo ratings yet
- Agenda: o Current Task Group Actions o Overview of API 6D 24 Edition o Future Task Group ActionsDocument29 pagesAgenda: o Current Task Group Actions o Overview of API 6D 24 Edition o Future Task Group ActionsdliyaxNo ratings yet
- 10 2006 Economic Pressure and Children's Psychological FunctioningDocument9 pages10 2006 Economic Pressure and Children's Psychological FunctioningMaria Carla JaymeNo ratings yet
- Chap 123 Final Paper N Aunt ADocument48 pagesChap 123 Final Paper N Aunt AjoannaotawayNo ratings yet
- A Mathematician's Apology - MediumDocument5 pagesA Mathematician's Apology - MediumPramav100% (1)
- Materi I:: Pengantar Prinsip-Prinsip Reaksi KimiaDocument35 pagesMateri I:: Pengantar Prinsip-Prinsip Reaksi KimiaDita Try OktaviyantiNo ratings yet
- Huawei 2G HandoverDocument32 pagesHuawei 2G HandoverRizal Mambaul AsnawiNo ratings yet
- Wmsu Shs Students Perception of Grade 11Document46 pagesWmsu Shs Students Perception of Grade 11jaywarven100% (1)
- Engineering Thermodynamics 2 MarksDocument16 pagesEngineering Thermodynamics 2 MarksSanjeev PawarNo ratings yet
- Raoult's LawDocument8 pagesRaoult's LawHARSH DHOLAKIYANo ratings yet
- Year 9 Database Exercise: 1. Identify The Type of Cars That You Will Include in Your DatabaseDocument9 pagesYear 9 Database Exercise: 1. Identify The Type of Cars That You Will Include in Your Databasesadtramp276No ratings yet
- Design and Implementation of A Software Result Processing and Transcript Generation SystemDocument7 pagesDesign and Implementation of A Software Result Processing and Transcript Generation SystemDinomarshal PezumNo ratings yet
- Bahir Dar University 1Document7 pagesBahir Dar University 1Anonymous QvkcpUeUcJNo ratings yet
- HP Laser 103a PrinterDocument2 pagesHP Laser 103a PrinterIsaac Musiwa BandaNo ratings yet
- 6.hydrogen Its CompoundDocument17 pages6.hydrogen Its CompoundpjaindakNo ratings yet
- Thumb Rules in Building Construction For Civil Engineers - Important Point of Civil Engineering - Construction Thumb Rules - Civil SiteDocument36 pagesThumb Rules in Building Construction For Civil Engineers - Important Point of Civil Engineering - Construction Thumb Rules - Civil SiteSandeep Kumar100% (2)
- Personality Traits of College Students in Emilio Aguinaldo CollegeDocument47 pagesPersonality Traits of College Students in Emilio Aguinaldo CollegeKassandra Fermano100% (1)
- Ec113 MidtermDocument47 pagesEc113 MidtermKeithNo ratings yet
- Sand Testing Report Rev01 NewDocument1 pageSand Testing Report Rev01 NewMuhammad Abrar100% (1)
- Log InformationDocument2 pagesLog InformationYakov Márcio MoraisNo ratings yet
- Omron ManualDocument44 pagesOmron ManualHaroDavidNo ratings yet
- Chemistry PG 2015 Admn On05sept2015Document96 pagesChemistry PG 2015 Admn On05sept2015ZiyadNo ratings yet
- Cubieboard Serial Conection TTLDocument4 pagesCubieboard Serial Conection TTLsaladfingers8989No ratings yet
- Database AssignmentDocument3 pagesDatabase AssignmentkaybNo ratings yet