
13) Motion and Measurement
13) Motion and Measurement
You might also like
- Guidance and Control of Ocean Vehicles-Thor I FossenDocument494 pagesGuidance and Control of Ocean Vehicles-Thor I Fossen孙慧慧100% (13)
- Machine Tool TestingDocument9 pagesMachine Tool TestingAdhan AliNo ratings yet
- Test Bank For College Physics 1st Edition by EtkinaDocument55 pagesTest Bank For College Physics 1st Edition by EtkinaaosdjaskdNo ratings yet
- Week 11 - Dynamic Motion Simulation - Lecture Presentation PDFDocument40 pagesWeek 11 - Dynamic Motion Simulation - Lecture Presentation PDFMinh Hai LuuNo ratings yet
- Machine Tool MetrologyDocument30 pagesMachine Tool MetrologyNagoor ShaikNo ratings yet
- Machine Tool Metrology: Introduction: - Stiffness & Rigidity of The Machine Tool & Its Components PartsDocument30 pagesMachine Tool Metrology: Introduction: - Stiffness & Rigidity of The Machine Tool & Its Components Partsmohd mansoor100% (1)
- The Sine Principle: ME 338: Manufacturing Processes II Instructor: Ramesh Singh Notes: Profs. Singh/KurfessDocument6 pagesThe Sine Principle: ME 338: Manufacturing Processes II Instructor: Ramesh Singh Notes: Profs. Singh/Kurfessjambu99No ratings yet
- Milling IndexingDocument25 pagesMilling IndexingJeevanantham KannanNo ratings yet
- CNC New Syllabus TopicsDocument51 pagesCNC New Syllabus TopicsVISMAY PATEL100% (1)
- Crank and Slotted Lever Quick Return Mechanism (Autosaved)Document21 pagesCrank and Slotted Lever Quick Return Mechanism (Autosaved)ASHISH SINGHNo ratings yet
- MachineToolTesting MechDocument87 pagesMachineToolTesting MechAnkit SharmaNo ratings yet
- A Mathematical Formulation For Tool Path Generation in 5-Axis Laser Welding Process Applied On A Free Form SurfaceDocument52 pagesA Mathematical Formulation For Tool Path Generation in 5-Axis Laser Welding Process Applied On A Free Form SurfaceRahul RajNo ratings yet
- Shift System Components in Manual Transmissions: Automotive Product Information API 09Document12 pagesShift System Components in Manual Transmissions: Automotive Product Information API 09Anonymous 3hUDn2No ratings yet
- Csir Co4 PDFDocument100 pagesCsir Co4 PDFRam MNo ratings yet
- Weikert 2004Document4 pagesWeikert 2004Research1 amtdcNo ratings yet
- Advanced Robotics PDFDocument47 pagesAdvanced Robotics PDFAubs ChomaNo ratings yet
- Cmms LectureDocument7 pagesCmms LecturerifkythadelNo ratings yet
- 2020me518 MomDocument43 pages2020me518 MomMuhammad HammadNo ratings yet
- Lamdamap03044fu PDFDocument10 pagesLamdamap03044fu PDFSong BunrithNo ratings yet
- MD 5Document33 pagesMD 5Aisha JainNo ratings yet
- A Report On R-Test Device For Accuracy Measurement On 5 Axis Machine ToolDocument19 pagesA Report On R-Test Device For Accuracy Measurement On 5 Axis Machine ToolShashi Bhushan GunjanNo ratings yet
- Robotics Manohar Notes Unit 3,4 & 5Document19 pagesRobotics Manohar Notes Unit 3,4 & 5Johnson PaulNo ratings yet
- Mechanism Design Chapter 1 - Fall 2020Document74 pagesMechanism Design Chapter 1 - Fall 2020J THE GAMERNo ratings yet
- Lec 2 Robot ManipulatorsDocument14 pagesLec 2 Robot ManipulatorsAjanthan AlagaratnamNo ratings yet
- Metrology1 PDFDocument76 pagesMetrology1 PDFDeepankumar AthiyannanNo ratings yet
- Alignment TestsDocument24 pagesAlignment TestsSharath Chandra PalleNo ratings yet
- SPIE 6422-32 Risley Prisms ToralesDocument8 pagesSPIE 6422-32 Risley Prisms ToralesnorbdudeNo ratings yet
- Alignment Module.Document64 pagesAlignment Module.Anthony MayNo ratings yet
- Advances in MetrologyDocument27 pagesAdvances in MetrologyraghughodadaraNo ratings yet
- Acceptance of MC Tool 123 PDFDocument24 pagesAcceptance of MC Tool 123 PDFakshayNo ratings yet
- Alignment Test ReportDocument16 pagesAlignment Test ReportSharath Chandra PalleNo ratings yet
- Engineering Mechanics Unit-5Document31 pagesEngineering Mechanics Unit-5ZeeshanNo ratings yet
- Lec02 ManipulatorsDocument7 pagesLec02 ManipulatorsMohamad YazidNo ratings yet
- Unit 3Document80 pagesUnit 3bmm16957No ratings yet
- Mechanical Design Interview Questions and AnswersDocument16 pagesMechanical Design Interview Questions and Answersarshad khanNo ratings yet
- Unit III NewDocument21 pagesUnit III NewsathiaNo ratings yet
- 5.EMM Lab ManualDocument38 pages5.EMM Lab ManualRakeshkumarcegNo ratings yet
- Acceptance TestDocument4 pagesAcceptance TestMehul BawaNo ratings yet
- EXP 03 - Kinematics of Cam MechanismsDocument9 pagesEXP 03 - Kinematics of Cam Mechanismsdtl.nnmNo ratings yet
- Cutting ToolsDocument30 pagesCutting ToolsJawad Sandhu100% (1)
- MECH3002Y METROLOGY NotesDocument9 pagesMECH3002Y METROLOGY NotesBenoit J. AyoungNo ratings yet
- Engineering Metrology and Measurements N.V. Raghavendra L. KrishnamurthyDocument31 pagesEngineering Metrology and Measurements N.V. Raghavendra L. KrishnamurthyRandøm TalkìêsNo ratings yet
- Sine BarDocument10 pagesSine BarShubham AroraNo ratings yet
- Motion Basics Terminology & StandardsDocument13 pagesMotion Basics Terminology & StandardsPasang ChogyiNo ratings yet
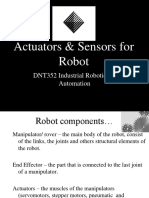
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNo ratings yet
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNo ratings yet
- MAK4462 Machine - Tools Lecture - Notes 3Document126 pagesMAK4462 Machine - Tools Lecture - Notes 3muhammet çalımNo ratings yet
- Introduction To Concepts in RoboticsDocument22 pagesIntroduction To Concepts in Roboticsharikiran3285No ratings yet
- ComparatorDocument20 pagesComparatorprakaashtNo ratings yet
- Shaper, Slotter and Planer Machines: Department of Mechanical Engineering SSETDocument27 pagesShaper, Slotter and Planer Machines: Department of Mechanical Engineering SSETsree_guruNo ratings yet
- The Accuracy of Angle EncodersDocument9 pagesThe Accuracy of Angle EncodersatulNo ratings yet
- Manual MM PrintFinalDocument34 pagesManual MM PrintFinalharshNo ratings yet
- WWW Engineering Com Story How Traditional Machine Tool AlignDocument8 pagesWWW Engineering Com Story How Traditional Machine Tool AlignDavid duranNo ratings yet
- Machine ElementsDocument59 pagesMachine ElementsJohn Melvin Delos Reyes100% (1)
- L740 Series BrochureDocument8 pagesL740 Series BrochureRoberto ChevezNo ratings yet
- Investigate The Spindle Error Motions From Thermal Change For High Precision CNC Machining CapabilityDocument7 pagesInvestigate The Spindle Error Motions From Thermal Change For High Precision CNC Machining CapabilityShamanth CNo ratings yet
- EM 212 Lec 8Document18 pagesEM 212 Lec 8Ahmed M. RezkNo ratings yet
- EM 212 Lec 8Document18 pagesEM 212 Lec 8Ahmed M. RezkNo ratings yet
- Kinematics of Mechanisms 1: M. Khoirul Effendi, PHDDocument29 pagesKinematics of Mechanisms 1: M. Khoirul Effendi, PHDAisya DewiNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Traditional Toolmaking: The Classic Treatise on Lapping, Threading, Precision Measurements, and General ToolmakingFrom EverandTraditional Toolmaking: The Classic Treatise on Lapping, Threading, Precision Measurements, and General ToolmakingRating: 5 out of 5 stars5/5 (2)
- Micrometers - Slide Gauges and Calipers - Principles, Construction, Operation and Use of Appliances for Fine Mechanical MeasurementsFrom EverandMicrometers - Slide Gauges and Calipers - Principles, Construction, Operation and Use of Appliances for Fine Mechanical MeasurementsNo ratings yet
- Tutorial 4 (Bolted and Welded Joints)Document3 pagesTutorial 4 (Bolted and Welded Joints)Shaleen ChhabraNo ratings yet
- Campus Recruiting BrochureDocument2 pagesCampus Recruiting BrochureShaleen ChhabraNo ratings yet
- 2Document2 pages2Shaleen ChhabraNo ratings yet
- Executive and Legislature: Created: 4/19/2012 3:51 PMDocument27 pagesExecutive and Legislature: Created: 4/19/2012 3:51 PMShaleen ChhabraNo ratings yet
- Metrology 2Document38 pagesMetrology 2Morgan InyangNo ratings yet
- SENR3255 - D5 GB System Operation-1Document49 pagesSENR3255 - D5 GB System Operation-1frgmanNo ratings yet
- AT3 Planetary Gearset and SimpsonDocument50 pagesAT3 Planetary Gearset and SimpsonNiteesh DuaNo ratings yet
- Mathcad - CONICOS - 2Document15 pagesMathcad - CONICOS - 2Entrerriano de CorzonNo ratings yet
- Phys111 Lecture02Document34 pagesPhys111 Lecture02Sefer AvdiajNo ratings yet
- Descriptive Title: Department of Mechanical EngineeringDocument50 pagesDescriptive Title: Department of Mechanical EngineeringNikol NekolNo ratings yet
- Inc. Jr-Super Chaina, n120 (2012-p2) DT 07-06-2021 Key, HintsDocument8 pagesInc. Jr-Super Chaina, n120 (2012-p2) DT 07-06-2021 Key, HintsDheeraj GuptaNo ratings yet
- Acceleration Velocity and Position Graphs WorksheetDocument4 pagesAcceleration Velocity and Position Graphs Worksheetsaini.hersheyNo ratings yet
- Turgeman (Ub 1982)Document20 pagesTurgeman (Ub 1982)Paramita BhattacharyaNo ratings yet
- Radioss Theory Manual: 10.0 Version - January 2009 Large Displacement Finite Element AnalysisDocument195 pagesRadioss Theory Manual: 10.0 Version - January 2009 Large Displacement Finite Element AnalysisFit Da'fox100% (1)
- Assignment Motion in Straight LineDocument2 pagesAssignment Motion in Straight LinePrateek Kapoor100% (1)
- R5310304 Kinematics of MachineryDocument2 pagesR5310304 Kinematics of MachinerysivabharathamurthyNo ratings yet
- 2 Velocity and AccelerationDocument28 pages2 Velocity and AccelerationAbdur RahmanNo ratings yet
- LN9 PDFDocument89 pagesLN9 PDFelty TanNo ratings yet
- Phy1 Q1 W2 SLM1 PDFDocument6 pagesPhy1 Q1 W2 SLM1 PDFCanones Legados Aaron MikeNo ratings yet
- Exam Review 3Document24 pagesExam Review 3api-223793512No ratings yet
- Kinematics: Pre-Medical: Physics AllenDocument3 pagesKinematics: Pre-Medical: Physics AllenDivya AgarawalNo ratings yet
- AP Physics ReviewDocument96 pagesAP Physics Reviewderekcal100% (7)
- Automobile SyllabusDocument157 pagesAutomobile SyllabussolomonrajarNo ratings yet
- IntroductionToRobotics Lecture06 PDFDocument12 pagesIntroductionToRobotics Lecture06 PDFY.EbadiNo ratings yet
- CAD-based Simulation of The Hobbing ProcessDocument11 pagesCAD-based Simulation of The Hobbing ProcessGabriel MariusNo ratings yet
- MKS 536E ACAD 2022 HomeworkDocument3 pagesMKS 536E ACAD 2022 HomeworkAbdulmuttalip ÇekliNo ratings yet
- Euler Savary Equation For Kinematic SynthesisDocument4 pagesEuler Savary Equation For Kinematic SynthesisDamodarNo ratings yet
- Farm Power and Machinery1Document108 pagesFarm Power and Machinery1Manish PandeyNo ratings yet
- Physics 2204 Worksheet #4 - Advanced Kinematics: 1 of 2 14 Feb 07Document2 pagesPhysics 2204 Worksheet #4 - Advanced Kinematics: 1 of 2 14 Feb 07wangks1980No ratings yet
- TOM IES GATE IAS 20 Years Question and Answers by S K Mondal PDFDocument137 pagesTOM IES GATE IAS 20 Years Question and Answers by S K Mondal PDFSudhir JainNo ratings yet
- Sec Phys Kinematics ProblemsDocument88 pagesSec Phys Kinematics ProblemsGaurav KumarNo ratings yet
- Lecture D12 - Relative Motion Using Translating/Rotating AxesDocument12 pagesLecture D12 - Relative Motion Using Translating/Rotating AxesFaiselNo ratings yet
- A - Engineering Mechanics - Pe Test PDFDocument2 pagesA - Engineering Mechanics - Pe Test PDFanon_964796336No ratings yet




























































































Download as pdf or txt
You might also like
- Guidance and Control of Ocean Vehicles-Thor I FossenDocument494 pagesGuidance and Control of Ocean Vehicles-Thor I Fossen孙慧慧100% (13)
- Machine Tool TestingDocument9 pagesMachine Tool TestingAdhan AliNo ratings yet
- Test Bank For College Physics 1st Edition by EtkinaDocument55 pagesTest Bank For College Physics 1st Edition by EtkinaaosdjaskdNo ratings yet
- Week 11 - Dynamic Motion Simulation - Lecture Presentation PDFDocument40 pagesWeek 11 - Dynamic Motion Simulation - Lecture Presentation PDFMinh Hai LuuNo ratings yet
- Machine Tool MetrologyDocument30 pagesMachine Tool MetrologyNagoor ShaikNo ratings yet
- Machine Tool Metrology: Introduction: - Stiffness & Rigidity of The Machine Tool & Its Components PartsDocument30 pagesMachine Tool Metrology: Introduction: - Stiffness & Rigidity of The Machine Tool & Its Components Partsmohd mansoor100% (1)
- The Sine Principle: ME 338: Manufacturing Processes II Instructor: Ramesh Singh Notes: Profs. Singh/KurfessDocument6 pagesThe Sine Principle: ME 338: Manufacturing Processes II Instructor: Ramesh Singh Notes: Profs. Singh/Kurfessjambu99No ratings yet
- Milling IndexingDocument25 pagesMilling IndexingJeevanantham KannanNo ratings yet
- CNC New Syllabus TopicsDocument51 pagesCNC New Syllabus TopicsVISMAY PATEL100% (1)
- Crank and Slotted Lever Quick Return Mechanism (Autosaved)Document21 pagesCrank and Slotted Lever Quick Return Mechanism (Autosaved)ASHISH SINGHNo ratings yet
- MachineToolTesting MechDocument87 pagesMachineToolTesting MechAnkit SharmaNo ratings yet
- A Mathematical Formulation For Tool Path Generation in 5-Axis Laser Welding Process Applied On A Free Form SurfaceDocument52 pagesA Mathematical Formulation For Tool Path Generation in 5-Axis Laser Welding Process Applied On A Free Form SurfaceRahul RajNo ratings yet
- Shift System Components in Manual Transmissions: Automotive Product Information API 09Document12 pagesShift System Components in Manual Transmissions: Automotive Product Information API 09Anonymous 3hUDn2No ratings yet
- Csir Co4 PDFDocument100 pagesCsir Co4 PDFRam MNo ratings yet
- Weikert 2004Document4 pagesWeikert 2004Research1 amtdcNo ratings yet
- Advanced Robotics PDFDocument47 pagesAdvanced Robotics PDFAubs ChomaNo ratings yet
- Cmms LectureDocument7 pagesCmms LecturerifkythadelNo ratings yet
- 2020me518 MomDocument43 pages2020me518 MomMuhammad HammadNo ratings yet
- Lamdamap03044fu PDFDocument10 pagesLamdamap03044fu PDFSong BunrithNo ratings yet
- MD 5Document33 pagesMD 5Aisha JainNo ratings yet
- A Report On R-Test Device For Accuracy Measurement On 5 Axis Machine ToolDocument19 pagesA Report On R-Test Device For Accuracy Measurement On 5 Axis Machine ToolShashi Bhushan GunjanNo ratings yet
- Robotics Manohar Notes Unit 3,4 & 5Document19 pagesRobotics Manohar Notes Unit 3,4 & 5Johnson PaulNo ratings yet
- Mechanism Design Chapter 1 - Fall 2020Document74 pagesMechanism Design Chapter 1 - Fall 2020J THE GAMERNo ratings yet
- Lec 2 Robot ManipulatorsDocument14 pagesLec 2 Robot ManipulatorsAjanthan AlagaratnamNo ratings yet
- Metrology1 PDFDocument76 pagesMetrology1 PDFDeepankumar AthiyannanNo ratings yet
- Alignment TestsDocument24 pagesAlignment TestsSharath Chandra PalleNo ratings yet
- SPIE 6422-32 Risley Prisms ToralesDocument8 pagesSPIE 6422-32 Risley Prisms ToralesnorbdudeNo ratings yet
- Alignment Module.Document64 pagesAlignment Module.Anthony MayNo ratings yet
- Advances in MetrologyDocument27 pagesAdvances in MetrologyraghughodadaraNo ratings yet
- Acceptance of MC Tool 123 PDFDocument24 pagesAcceptance of MC Tool 123 PDFakshayNo ratings yet
- Alignment Test ReportDocument16 pagesAlignment Test ReportSharath Chandra PalleNo ratings yet
- Engineering Mechanics Unit-5Document31 pagesEngineering Mechanics Unit-5ZeeshanNo ratings yet
- Lec02 ManipulatorsDocument7 pagesLec02 ManipulatorsMohamad YazidNo ratings yet
- Unit 3Document80 pagesUnit 3bmm16957No ratings yet
- Mechanical Design Interview Questions and AnswersDocument16 pagesMechanical Design Interview Questions and Answersarshad khanNo ratings yet
- Unit III NewDocument21 pagesUnit III NewsathiaNo ratings yet
- 5.EMM Lab ManualDocument38 pages5.EMM Lab ManualRakeshkumarcegNo ratings yet
- Acceptance TestDocument4 pagesAcceptance TestMehul BawaNo ratings yet
- EXP 03 - Kinematics of Cam MechanismsDocument9 pagesEXP 03 - Kinematics of Cam Mechanismsdtl.nnmNo ratings yet
- Cutting ToolsDocument30 pagesCutting ToolsJawad Sandhu100% (1)
- MECH3002Y METROLOGY NotesDocument9 pagesMECH3002Y METROLOGY NotesBenoit J. AyoungNo ratings yet
- Engineering Metrology and Measurements N.V. Raghavendra L. KrishnamurthyDocument31 pagesEngineering Metrology and Measurements N.V. Raghavendra L. KrishnamurthyRandøm TalkìêsNo ratings yet
- Sine BarDocument10 pagesSine BarShubham AroraNo ratings yet
- Motion Basics Terminology & StandardsDocument13 pagesMotion Basics Terminology & StandardsPasang ChogyiNo ratings yet
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNo ratings yet
- Actuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationDocument77 pagesActuators & Sensors For Robot: DNT352 Industrial Robotics & AutomationAzim UcinNo ratings yet
- MAK4462 Machine - Tools Lecture - Notes 3Document126 pagesMAK4462 Machine - Tools Lecture - Notes 3muhammet çalımNo ratings yet
- Introduction To Concepts in RoboticsDocument22 pagesIntroduction To Concepts in Roboticsharikiran3285No ratings yet
- ComparatorDocument20 pagesComparatorprakaashtNo ratings yet
- Shaper, Slotter and Planer Machines: Department of Mechanical Engineering SSETDocument27 pagesShaper, Slotter and Planer Machines: Department of Mechanical Engineering SSETsree_guruNo ratings yet
- The Accuracy of Angle EncodersDocument9 pagesThe Accuracy of Angle EncodersatulNo ratings yet
- Manual MM PrintFinalDocument34 pagesManual MM PrintFinalharshNo ratings yet
- WWW Engineering Com Story How Traditional Machine Tool AlignDocument8 pagesWWW Engineering Com Story How Traditional Machine Tool AlignDavid duranNo ratings yet
- Machine ElementsDocument59 pagesMachine ElementsJohn Melvin Delos Reyes100% (1)
- L740 Series BrochureDocument8 pagesL740 Series BrochureRoberto ChevezNo ratings yet
- Investigate The Spindle Error Motions From Thermal Change For High Precision CNC Machining CapabilityDocument7 pagesInvestigate The Spindle Error Motions From Thermal Change For High Precision CNC Machining CapabilityShamanth CNo ratings yet
- EM 212 Lec 8Document18 pagesEM 212 Lec 8Ahmed M. RezkNo ratings yet
- EM 212 Lec 8Document18 pagesEM 212 Lec 8Ahmed M. RezkNo ratings yet
- Kinematics of Mechanisms 1: M. Khoirul Effendi, PHDDocument29 pagesKinematics of Mechanisms 1: M. Khoirul Effendi, PHDAisya DewiNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Traditional Toolmaking: The Classic Treatise on Lapping, Threading, Precision Measurements, and General ToolmakingFrom EverandTraditional Toolmaking: The Classic Treatise on Lapping, Threading, Precision Measurements, and General ToolmakingRating: 5 out of 5 stars5/5 (2)
- Micrometers - Slide Gauges and Calipers - Principles, Construction, Operation and Use of Appliances for Fine Mechanical MeasurementsFrom EverandMicrometers - Slide Gauges and Calipers - Principles, Construction, Operation and Use of Appliances for Fine Mechanical MeasurementsNo ratings yet
- Tutorial 4 (Bolted and Welded Joints)Document3 pagesTutorial 4 (Bolted and Welded Joints)Shaleen ChhabraNo ratings yet
- Campus Recruiting BrochureDocument2 pagesCampus Recruiting BrochureShaleen ChhabraNo ratings yet
- 2Document2 pages2Shaleen ChhabraNo ratings yet
- Executive and Legislature: Created: 4/19/2012 3:51 PMDocument27 pagesExecutive and Legislature: Created: 4/19/2012 3:51 PMShaleen ChhabraNo ratings yet
- Metrology 2Document38 pagesMetrology 2Morgan InyangNo ratings yet
- SENR3255 - D5 GB System Operation-1Document49 pagesSENR3255 - D5 GB System Operation-1frgmanNo ratings yet
- AT3 Planetary Gearset and SimpsonDocument50 pagesAT3 Planetary Gearset and SimpsonNiteesh DuaNo ratings yet
- Mathcad - CONICOS - 2Document15 pagesMathcad - CONICOS - 2Entrerriano de CorzonNo ratings yet
- Phys111 Lecture02Document34 pagesPhys111 Lecture02Sefer AvdiajNo ratings yet
- Descriptive Title: Department of Mechanical EngineeringDocument50 pagesDescriptive Title: Department of Mechanical EngineeringNikol NekolNo ratings yet
- Inc. Jr-Super Chaina, n120 (2012-p2) DT 07-06-2021 Key, HintsDocument8 pagesInc. Jr-Super Chaina, n120 (2012-p2) DT 07-06-2021 Key, HintsDheeraj GuptaNo ratings yet
- Acceleration Velocity and Position Graphs WorksheetDocument4 pagesAcceleration Velocity and Position Graphs Worksheetsaini.hersheyNo ratings yet
- Turgeman (Ub 1982)Document20 pagesTurgeman (Ub 1982)Paramita BhattacharyaNo ratings yet
- Radioss Theory Manual: 10.0 Version - January 2009 Large Displacement Finite Element AnalysisDocument195 pagesRadioss Theory Manual: 10.0 Version - January 2009 Large Displacement Finite Element AnalysisFit Da'fox100% (1)
- Assignment Motion in Straight LineDocument2 pagesAssignment Motion in Straight LinePrateek Kapoor100% (1)
- R5310304 Kinematics of MachineryDocument2 pagesR5310304 Kinematics of MachinerysivabharathamurthyNo ratings yet
- 2 Velocity and AccelerationDocument28 pages2 Velocity and AccelerationAbdur RahmanNo ratings yet
- LN9 PDFDocument89 pagesLN9 PDFelty TanNo ratings yet
- Phy1 Q1 W2 SLM1 PDFDocument6 pagesPhy1 Q1 W2 SLM1 PDFCanones Legados Aaron MikeNo ratings yet
- Exam Review 3Document24 pagesExam Review 3api-223793512No ratings yet
- Kinematics: Pre-Medical: Physics AllenDocument3 pagesKinematics: Pre-Medical: Physics AllenDivya AgarawalNo ratings yet
- AP Physics ReviewDocument96 pagesAP Physics Reviewderekcal100% (7)
- Automobile SyllabusDocument157 pagesAutomobile SyllabussolomonrajarNo ratings yet
- IntroductionToRobotics Lecture06 PDFDocument12 pagesIntroductionToRobotics Lecture06 PDFY.EbadiNo ratings yet
- CAD-based Simulation of The Hobbing ProcessDocument11 pagesCAD-based Simulation of The Hobbing ProcessGabriel MariusNo ratings yet
- MKS 536E ACAD 2022 HomeworkDocument3 pagesMKS 536E ACAD 2022 HomeworkAbdulmuttalip ÇekliNo ratings yet
- Euler Savary Equation For Kinematic SynthesisDocument4 pagesEuler Savary Equation For Kinematic SynthesisDamodarNo ratings yet
- Farm Power and Machinery1Document108 pagesFarm Power and Machinery1Manish PandeyNo ratings yet
- Physics 2204 Worksheet #4 - Advanced Kinematics: 1 of 2 14 Feb 07Document2 pagesPhysics 2204 Worksheet #4 - Advanced Kinematics: 1 of 2 14 Feb 07wangks1980No ratings yet
- TOM IES GATE IAS 20 Years Question and Answers by S K Mondal PDFDocument137 pagesTOM IES GATE IAS 20 Years Question and Answers by S K Mondal PDFSudhir JainNo ratings yet
- Sec Phys Kinematics ProblemsDocument88 pagesSec Phys Kinematics ProblemsGaurav KumarNo ratings yet
- Lecture D12 - Relative Motion Using Translating/Rotating AxesDocument12 pagesLecture D12 - Relative Motion Using Translating/Rotating AxesFaiselNo ratings yet
- A - Engineering Mechanics - Pe Test PDFDocument2 pagesA - Engineering Mechanics - Pe Test PDFanon_964796336No ratings yet