Download as pdf or txt
You might also like
- M Schemes 02Document3 pagesM Schemes 02Pathmanathan Nadeson22% (9)
- Biotensegrity and Myofascial Chains - A Global Approach To An Integrated Kinectic Chain PDFDocument7 pagesBiotensegrity and Myofascial Chains - A Global Approach To An Integrated Kinectic Chain PDFElaine CspNo ratings yet
- Mechanics of Bipedalism: An Exploration of Skeletal Morphology and ForceDocument47 pagesMechanics of Bipedalism: An Exploration of Skeletal Morphology and Forcejohnny cartinNo ratings yet
- Food Trunspmt Und Origin Hominid Bipedalism'Document24 pagesFood Trunspmt Und Origin Hominid Bipedalism'Muhammad AsifNo ratings yet
- The Evolution of The Upright Posture and Gait-A ReviewDocument23 pagesThe Evolution of The Upright Posture and Gait-A ReviewRicardo Filipe Afonso MangeronaNo ratings yet
- A Case For Bipedalism and Brain SizeDocument7 pagesA Case For Bipedalism and Brain Sizeapi-242268688No ratings yet
- ARCH200 Research PaperDocument13 pagesARCH200 Research PaperSara FarooqNo ratings yet
- Introduction To Human Movement Science PDFDocument9 pagesIntroduction To Human Movement Science PDFJoana Rose FantonialNo ratings yet
- Navigating The Human Hippocampus Without A GPS - Ranganath Et - Al.Document24 pagesNavigating The Human Hippocampus Without A GPS - Ranganath Et - Al.SY LodhiNo ratings yet
- History of EvolutionDocument37 pagesHistory of EvolutionLatha MahendraNo ratings yet
- Comparative Aspects of Gait, Scaling and Mechanics in MammalsDocument17 pagesComparative Aspects of Gait, Scaling and Mechanics in MammalsjavictoriNo ratings yet
- New Evidence: Only People Ever Walked Really Upright: Ing Individuals, Cells in The MembranousDocument2 pagesNew Evidence: Only People Ever Walked Really Upright: Ing Individuals, Cells in The MembranousArturoMerazNo ratings yet
- The Evolution of Clinical Gait Analysis Part L: Kinesiological EMGDocument10 pagesThe Evolution of Clinical Gait Analysis Part L: Kinesiological EMGslermalaraNo ratings yet
- Footprints Reveal Direct Evidence of Group Behavior and Locomotion in Homo ErectusDocument9 pagesFootprints Reveal Direct Evidence of Group Behavior and Locomotion in Homo Erectusvictor muñozNo ratings yet
- From Biomechanics To Mechanobiology: J.-F. Stoltz and X. WangDocument6 pagesFrom Biomechanics To Mechanobiology: J.-F. Stoltz and X. WangMustafa ErbakanNo ratings yet
- 2006 NadjaiDocument15 pages2006 NadjaiViraj GaonkarNo ratings yet
- 4134 FullDocument6 pages4134 FullmaiNo ratings yet
- Clark Andy - Embodied Cog Science - 1999 TrendsDocument7 pagesClark Andy - Embodied Cog Science - 1999 TrendsMartin BarretoNo ratings yet
- Muscle Forces and The Demands of Human Walking: Adam D. Sylvester, Steven G. Lautzenheiser and Patricia Ann KramerDocument10 pagesMuscle Forces and The Demands of Human Walking: Adam D. Sylvester, Steven G. Lautzenheiser and Patricia Ann KramerCarmen Cuerdo del RíoNo ratings yet
- Visualizing_vertebrates_new_methods_in_fDocument3 pagesVisualizing_vertebrates_new_methods_in_flenaNo ratings yet
- Journal of Human Evolution 2008 WatsonDocument9 pagesJournal of Human Evolution 2008 Watsonjohnny cartinNo ratings yet
- Human KinesiologyDocument26 pagesHuman KinesiologyTrinidad Farías PiñeiroNo ratings yet
- RC - Advanced QuestionsDocument57 pagesRC - Advanced QuestionsJeff LeeNo ratings yet
- Warrener-2017 Hominin Hip Biomechanics - Changing PerspectivesDocument14 pagesWarrener-2017 Hominin Hip Biomechanics - Changing PerspectivesmaiNo ratings yet
- AntropologieDocument10 pagesAntropologieBianca GherghelucaNo ratings yet
- Pucciarelli 2000Document12 pagesPucciarelli 2000shikarineha5591No ratings yet
- Somatic Twist TheoryDocument5 pagesSomatic Twist TheoryRavi KumarNo ratings yet
- IntroductionDocument2 pagesIntroductionbiñan lagunaNo ratings yet
- Current Research in Physiology: Collin CarrollDocument8 pagesCurrent Research in Physiology: Collin CarrollAdrianSierradelReyNo ratings yet
- Biomechanics Pronation SupinationDocument10 pagesBiomechanics Pronation SupinationProfesseur Christian DumontierNo ratings yet
- Journal of Human Evolution: Gabrielle A. Russo, Liza J. ShapiroDocument13 pagesJournal of Human Evolution: Gabrielle A. Russo, Liza J. ShapiroYsNo ratings yet
- 6 Layer Model For High Strangeness Vallee - DavisDocument13 pages6 Layer Model For High Strangeness Vallee - Davissam akinaNo ratings yet
- Chapter 8 Biology 11Document24 pagesChapter 8 Biology 11ax1leNo ratings yet
- Ape To Man TranscriptDocument26 pagesApe To Man Transcriptteume reader accNo ratings yet
- Core StabilityDocument4 pagesCore StabilityWhisperer BowenNo ratings yet
- Did Consciousness Cause The Cambrian Evolutionary ExplosionDocument18 pagesDid Consciousness Cause The Cambrian Evolutionary ExplosionBerry BernieNo ratings yet
- Science of Human Movements - Meaning, Name, Directions of DevelopmentDocument20 pagesScience of Human Movements - Meaning, Name, Directions of DevelopmentJoana Rose FantonialNo ratings yet
- Hochner2006 - Octopus BrainDocument11 pagesHochner2006 - Octopus BrainGuilherme SouzaNo ratings yet
- Neuromechanical Interactions Between The Limbs DurDocument24 pagesNeuromechanical Interactions Between The Limbs DurWisnu Prasetyo AdhiNo ratings yet
- Chapter 2 - Evolution of Nervous Systems and Brains (Roth and Dicke) - Book Neurosciences, From Molecule To BehaviorDocument28 pagesChapter 2 - Evolution of Nervous Systems and Brains (Roth and Dicke) - Book Neurosciences, From Molecule To BehaviorLilian Cerri MazzaNo ratings yet
- Teleportation - WikipediaDocument17 pagesTeleportation - Wikipediawara_ir3598No ratings yet
- The Influence of Speed and Size On Avian Terrestrial Locomotor Biomechanics: Predicting Locomotion in Extinct Theropod DinosaursDocument40 pagesThe Influence of Speed and Size On Avian Terrestrial Locomotor Biomechanics: Predicting Locomotion in Extinct Theropod DinosaursDavidCernyNo ratings yet
- Pearson 2008 EvAnth Modern Human MorphologyDocument11 pagesPearson 2008 EvAnth Modern Human MorphologyRachid BenNo ratings yet
- Position Paper 1 V 1.0Document6 pagesPosition Paper 1 V 1.0WIldCard16No ratings yet
- Evolutionary Biology: Giovanne G. TamposDocument53 pagesEvolutionary Biology: Giovanne G. TamposAko si BoknoyNo ratings yet
- 7 1 ChaseDocument49 pages7 1 ChaseumitNo ratings yet
- Locomotion and Postural BehaviourDocument17 pagesLocomotion and Postural BehaviourMiguel LessaNo ratings yet
- TMH ComplexSystemsLandscapeRecognizingWhats OwensDocument29 pagesTMH ComplexSystemsLandscapeRecognizingWhats OwensSergio VargasNo ratings yet
- Cannibalism in The NeolithicDocument8 pagesCannibalism in The NeolithicJohn Carlo CortezNo ratings yet
- Concept of LifeDocument11 pagesConcept of LifeLiezl Cutchon CaguiatNo ratings yet
- Cappozzo HMS 1984 - Gait Analysis MethodologyDocument26 pagesCappozzo HMS 1984 - Gait Analysis MethodologyAlin PetcuNo ratings yet
- How Animals Move 3Document8 pagesHow Animals Move 3Juan Pablo Vargas GarciaNo ratings yet
- Brain Activity Evoked by The Perception of Human Walking-Controlling For Meaning (Pelphrey Et Al 2003) STS - DISTINCIÓN MOV. BIOLOGICO - NO-BIOLOGICODocument7 pagesBrain Activity Evoked by The Perception of Human Walking-Controlling For Meaning (Pelphrey Et Al 2003) STS - DISTINCIÓN MOV. BIOLOGICO - NO-BIOLOGICOapi-3695811No ratings yet
- Cranial Variables As Predictors Hominine Body Mass: WordsDocument18 pagesCranial Variables As Predictors Hominine Body Mass: WordsgimenezNo ratings yet
- Module 3 Intellectual Revolution That Defined SocietyDocument8 pagesModule 3 Intellectual Revolution That Defined SocietyCharles CabarlesNo ratings yet
- H09 18432 CosmologicalPatternsinAncientEgyptandChina2 FinalDocument20 pagesH09 18432 CosmologicalPatternsinAncientEgyptandChina2 FinalMaria Sri PangestutiNo ratings yet
- Forbidden ArcheologyDocument10 pagesForbidden ArcheologyHashim.Jeffers6846No ratings yet
- SuamiDocument6 pagesSuamiZULMA MADELINE LIBNY GUTARRA TICANo ratings yet
- Jesus Crucifixion AnatomyDocument32 pagesJesus Crucifixion AnatomyAlexandre MazetNo ratings yet
- Recognise People by The Way They Walk.Document7 pagesRecognise People by The Way They Walk.Béllà NoussaNo ratings yet
- 723 (2010) Hernán A. Burbano,: Science Et AlDocument4 pages723 (2010) Hernán A. Burbano,: Science Et Aljohnny cartinNo ratings yet
- A Draft Sequence of The Neandertal Genome (Sapiens/Neanderthal Interbreeding)Document14 pagesA Draft Sequence of The Neandertal Genome (Sapiens/Neanderthal Interbreeding)José Pedro GomesNo ratings yet
- Close Encounters of The Prehistoric Kind: OnlineDocument5 pagesClose Encounters of The Prehistoric Kind: Onlinejohnny cartinNo ratings yet
- A Cranium For The Earliest Europeans: Phylogenetic Position of The Hominid From Ceprano, ItalyDocument6 pagesA Cranium For The Earliest Europeans: Phylogenetic Position of The Hominid From Ceprano, Italyjohnny cartinNo ratings yet
- Neanader 2 PDFDocument5 pagesNeanader 2 PDFjohnny cartinNo ratings yet
- Neanader 2 PDFDocument5 pagesNeanader 2 PDFjohnny cartinNo ratings yet
- The First Female Homo Erectus Pelvis, From Gona, Afar, EthiopiaDocument5 pagesThe First Female Homo Erectus Pelvis, From Gona, Afar, Ethiopiajohnny cartinNo ratings yet
- 06-11-03: 160,000-Year-Old Skulls Are Oldest Anatomically Mode...Document5 pages06-11-03: 160,000-Year-Old Skulls Are Oldest Anatomically Mode...johnny cartinNo ratings yet
- Cell, Vol. 90, 19-30, July 11, 1997, Copyright ©1997 byDocument12 pagesCell, Vol. 90, 19-30, July 11, 1997, Copyright ©1997 byjohnny cartinNo ratings yet
- American Journal of Physical Anthropology 138:90-100 (2009)Document11 pagesAmerican Journal of Physical Anthropology 138:90-100 (2009)johnny cartinNo ratings yet
- The Mystery Ape From LonggupoDocument4 pagesThe Mystery Ape From Longgupojohnny cartinNo ratings yet
- Homo Erectus2Document2 pagesHomo Erectus2johnny cartinNo ratings yet
- Foraging of Homo Ergaster and Australopithecus Boisei in East African EnvironmentsDocument6 pagesForaging of Homo Ergaster and Australopithecus Boisei in East African Environmentsjohnny cartinNo ratings yet
- Giants' in The Land: An Assessment of Gigantopithecus and MeganthropusDocument4 pagesGiants' in The Land: An Assessment of Gigantopithecus and Meganthropusjohnny cartinNo ratings yet
- American Journal of Physical Anthropology 138:90-100 (2009)Document11 pagesAmerican Journal of Physical Anthropology 138:90-100 (2009)johnny cartinNo ratings yet
- Afar Ens IsDocument15 pagesAfar Ens Isjohnny cartinNo ratings yet
- Aethiopicus 1Document3 pagesAethiopicus 1johnny cartinNo ratings yet
- Afar 222Document31 pagesAfar 222johnny cartinNo ratings yet
- Robustus 2Document5 pagesRobustus 2johnny cartinNo ratings yet
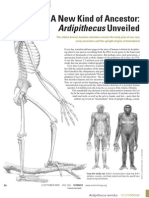
- A New Kind of Ancestor: Ardipithecus UnveiledDocument5 pagesA New Kind of Ancestor: Ardipithecus Unveiledjohnny cartinNo ratings yet
- How To Read A Dji Terra Quality ReportDocument10 pagesHow To Read A Dji Terra Quality ReportRazvan Julian PetrescuNo ratings yet
- CDAP006 Subfloor Protection PDFDocument2 pagesCDAP006 Subfloor Protection PDFGustavo Márquez TorresNo ratings yet
- X Airlines (Ernest)Document7 pagesX Airlines (Ernest)EstongNo ratings yet
- Chapter 5: Departure On A Mission Leonor Rivera and RizalDocument2 pagesChapter 5: Departure On A Mission Leonor Rivera and RizalabcineNo ratings yet
- Task Force ProposalDocument8 pagesTask Force ProposalForkLogNo ratings yet
- DP FourSeals ENGDocument60 pagesDP FourSeals ENGgeorgia83609No ratings yet
- SQR Language ReferenceDocument556 pagesSQR Language Referencericardosantos32No ratings yet
- Daily Lesson Plan: Deped Region 7 Poblacion, Talisay City, CebuDocument2 pagesDaily Lesson Plan: Deped Region 7 Poblacion, Talisay City, CebuMarjorie Nervez Sarino Bongato50% (2)
- Unit 5 - Event Driven ProgrammingDocument22 pagesUnit 5 - Event Driven ProgrammingdharanyaNo ratings yet
- Instruction Manual: HF TransceiverDocument88 pagesInstruction Manual: HF TransceiverRahadianNo ratings yet
- Miama: A Small Introduction To The Free Font Miama by Linus Romer, AugustDocument5 pagesMiama: A Small Introduction To The Free Font Miama by Linus Romer, Augustjose chaveroNo ratings yet
- Sinusoidal OscillatorsDocument8 pagesSinusoidal Oscillatorslid20No ratings yet
- Chapter 03 - Louwers 5eDocument23 pagesChapter 03 - Louwers 5eMonique GordonNo ratings yet
- En SATURNevo ZGS.10.20 User Manual 13Document1 pageEn SATURNevo ZGS.10.20 User Manual 13emadsafy20002239No ratings yet
- Statement of Claim Form PDFDocument3 pagesStatement of Claim Form PDFWalla MahmoudNo ratings yet
- Mbm-Italien EnuDocument285 pagesMbm-Italien EnuRadwan AL TrougNo ratings yet
- The Five Pillars of Effective WritingDocument4 pagesThe Five Pillars of Effective WritingPrecy M AgatonNo ratings yet
- Practice Test (2020) - 3Document2 pagesPractice Test (2020) - 3Duy HảiNo ratings yet
- Quizapp: 15It324E Mini Project ReportDocument24 pagesQuizapp: 15It324E Mini Project ReportSubroto DasNo ratings yet
- A Total Productive Maintenance (TPM) Approach To Improve Overall Equipment EfficiencyDocument4 pagesA Total Productive Maintenance (TPM) Approach To Improve Overall Equipment EfficiencyIJMERNo ratings yet
- Personal Workbook For Breaking The Chain of Low Self EsteemDocument308 pagesPersonal Workbook For Breaking The Chain of Low Self EsteemPragyan Nanda100% (1)
- Notes 01. Scaling and Shifting 1D FunctionsDocument3 pagesNotes 01. Scaling and Shifting 1D FunctionsJean ReneNo ratings yet
- Macbeth Lesson PlanDocument2 pagesMacbeth Lesson Planrymahoney10No ratings yet
- Safety Rules and Laboratory Equipment: Experiment 1Document5 pagesSafety Rules and Laboratory Equipment: Experiment 1ricardojosecortinaNo ratings yet
- Deflection of Straight BeamsDocument20 pagesDeflection of Straight BeamshideoNo ratings yet
- FormDocument83 pagesFormAnimesh SinghNo ratings yet
- Case Study - Box-JenkinsDocument10 pagesCase Study - Box-JenkinsVedant MishraNo ratings yet
- Material-Handler HydraForce 2015Document10 pagesMaterial-Handler HydraForce 2015yonggilNo ratings yet
- Colah Github Io Posts 2015 08 Understanding LSTMsDocument16 pagesColah Github Io Posts 2015 08 Understanding LSTMsMithun PantNo ratings yet