Download as pdf or txt
International Journal of Application or Innovation in Engineering& Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 03, Issue 09, September 2014 ISSN 2319 - 4847
Volume 3, Issue 9, September 2014 Page 268
ABSTRACT
Active contour models or snakes are widely used in many image processing application, medical image processing as these are
the effective methods for object extraction. The difficulties of the active contour models are evolution direction must be
predefined, cannot progress into deeper concavities of boundary. In this paper, object segmentation is achieved by defining
Poincare map method in a defined vector field. By generating interpolated swirling & attracting flow vector for the input image
then the states on limit cycles are located by converging the newton-Raphson sequences on the given Poincare sections. These
converged states determine the limit cycles and the object boundaries are represented by integral equations.
Keywords: Image segmentation, Poincare map method, limit cycles, Active contour.
1. INTRODUCTION
Most of the image based application and operation needs individual object to be detected or divided from the image and
transform it into a proper structure for further computer processing. So segmenting an image depending on intensity,
color and quality is one way of separating the object of interest from the image. Segmentation is dividing the image into
several sub regions. Separating object of interest from an image has become important in the world of computer vision.
Active contour models are widely in the area of segmentation. Though active contour have the ability of object
detection and shape representation there are mainly three reason where active contour limits like:
1. They are sensitive to initialization.
2. The direction of the evolution must be predefined.
3. They usually stick to local minima due to which the contour cannot progress into deeper concavities of the
boundary.
Some another methods were also evolved as a solution for the above problems of active contour models. The solution
focused on pulling the active contour to the boundary of interest by some internal force or external force field. These
methods successfully moved the active contour across the local minimal but still there exist some conflicting
components that stopped the contour from locating the exact boundary. In this paper, different method of curve
evolution and object segmentation is discussed. First an ISAF (interpolating swirling and attracting flow field) is
generated for the observed image. This field contains two main component diffused ETF (DETF) and diffused edge
perpendicular flow (DEPF) near the boundary. This flow field is known as vector flow field different form the
traditional vector field, the components near the boundary in this vector field are tangent to the boundary instead of
perpendicular. Then the limit cycles corresponding to the observed object are located by newton-Raphson algorithm in
the defined Poincare section. By locating the limit cycles the image segmentation can be achieved for the observed
image.
2. LITERATURE SURVEY
Many image processing applications and operations needs locating the object boundaries and edge detection, shape
representation and image segmentation. Many image segmentation algorithms like Clustering methods, Compression-
based methods, Edge detection methods, Region growing methods have been developed also some Partial differential
equation-based method like Parametric methods and Level set methods have also been developed. Kass et al proposed
the evolution of active contour extract objects in images. These contours are evolved by minimizing its energy. It
includes internal and external energy of an image. The external energy pulls the curves towards the desired boundaries
and the internal energy of an image maintains the curve smoothness. The main drawback of ACM or Snakes is that it is
sensitive to noise and smaller objects may attract the snake to a local energy minimum, which is not the actual
boundary. Thus, to reach the desired boundary, the initial contour should be initialized close to the object as well it is
Object Segmentation using Poincare Map
Method
Ruchita V Indulkar
1
, Sanjay D Jondhale
2
1
Department of Computer Engineering, PG Student, SVIT Chincholi, Nashik, University of Pune, India
2
Department of Computer Engineering, Associate Professor, SVIT Chincholi, Nashik, University of Pune, India
International Journal of Application or Innovation in Engineering& Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 03, Issue 09, September 2014 ISSN 2319 - 4847
Volume 3, Issue 9, September 2014 Page 269
also unable to handle topological changes and fails to detect deeper concavities of the object. Xu and prince proposed a
gradient vector flow (GVF) field. GVF calculates the diffusion of gradient vectors of a gray scale or binary image and
also facilates flexible initialization of contour and improved convergence to boundary concavities with larger capture
range. Though this method has better flexibility to initialization and can progress into deeper concavities of the object
image, one of the difficulty with this model is it forces the contour into long and thin boundary indentions. The GGVF
(generalized gradient vector flow field) extends the GVF by introducing non-uniform diffusion and is defined as a
steady state solution of a system. The GGVF can deal with the long and thin boundary indentations. Vector field
convolution (VFC) was presented by Bing li and Scott T. Acton to address the difficulties of the GVF, GGVF and
traditional snakes like high computational cost; noise etc. by calculating the external force. This force is calculated by
convolving vector field with edge map from the image. One of the Disadvantage of VFC is that the strong edges may
drown the weak edges. PSC scheme was presented by Osher and Sethian for moving surfaces under the corresponding
curvature. This algorithm was dependent on numerically solving Hamilton-Jacobi equations with viscous terms, using
approximation techniques from hyperbolic conservation laws. The above mentioned models have some of the
difficulties to initialization and poor convergence to deeper concavities of the boundary and equilibrium issues in the
vector field which stopped the contour form progressing further to locate exact boundaries.
3. IMPLEMENTATIONS DETAILS
The proposed method aims on locating the exact boundaries.
The proposed system mainly aims at:
1. Generation of ISAF Field for image.
2. Setting initial states closer to boundary of object and calculating the convergent states using the newton raphson
method in the Poincare section.
3. After finding the convergent states the object boundaries are linked using the integral equations which are the
exact detected boundary of an object.
4. Multiple image segmentation.
3.1 ISAF field
Interpolated swirling and attracting flow (ISAF) is composed of two main component diffused ETF (DETF) and
diffused edge perpendicular flow (DEPF). They are the swirling and attracting components respectively. DETF is a
swirl around the boundary of an object and if any eddy is present then the particles away from the image map will be
attracted to the boundary and is directed to move to the boundary along the streamlines. ISAF field generated for the
observed image attracts the components and direct them to the streamlines generated at the boundary in rounded
fashion. Then these eddies are treated as the as limit cycle of a vector field that belong to dynamical system.
3.2 Poincare Map and Newton-Raphson algorithm
The Poincare section for the image is described as follows:
Where is the Poincare section, h* is normal of and X0 is the initial state. The zero computation of periods in
Poincare section is achieved by the Newton-Raphson method. As poor the value of period is, newton-Raphson sequence
causes positive Poincare on 0 far away from 0 even if it is on the limit cycle.
3.3 Multiple Object Segmentation
In this phase after the generation of ISAF field of an image N distinct initial state are randomly set in image domain.
These states are placed closer to the object boundary, by calculating the converged states using Newton-Raphson
method these N states are moved within the flow field and finally moved to the boundaries.
The representation for the objects boundaries with N converged states is:
Here B denotes the object boundaries with N converged states, X () denotes the periods for l=1.N and N are the
number of initial states on the boundary.
International Journal of Application or Innovation in Engineering& Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 03, Issue 09, September 2014 ISSN 2319 - 4847
Volume 3, Issue 9, September 2014 Page 270
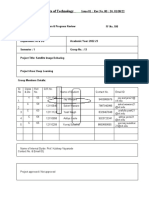
Figure 1 Blocked diagram of the system
4. RESULTS
Following are the result obtained
Table 1: Result Obtained using Poincare and Newton Raphson method
Sr.
no
Initial States Converged states Iterations
Objec
ts
Detec
ted
1. { (17,136) , (321,158) } { (18,136) , (320,158) } { 1, 2 } 1
2. { (97,251), (70,70), (254,254),
(286,167) }
{ (98,251), (71,70), (253,245),
(270,160)}
{ 1, 2, 3, 64} 1
3. { (27,108), (120,20), (47,224),
(223,264), (337,176), (257,65) }
{ (28,108), (120,20), (48,224),
(222,264), (336,176), (256,65) }
{ 1, 2, 3, 4, 5,6} 2
4. { (7,67), (83,16), (193,259),
(267,50) }
{ (8,67), (83,16), (192,259), (265,50)
}
{ 1, 2, 3, 4 } 2
5. {(205,95), (55,85), (103,20),
(103,241), (248,196) }
{ (204,95), (56,85) (103 , 33),
(103,241) (225,248) }
{ 1, 2, 87, 4, 166} 1
6. { (18 , 130), (116 , 131), (107 ,
21), (34 , 19), (8 , 38), (86 , 123),
(127 , 87), (69 , 11), (105 , 147) }
{ (19 , 130), (115 , 131), (106 , 21),
(35 , 19), (24 , 53), (85 , 123), (126 ,
87), (68 , 11), (104 , 147)
{1,2,3,4,140,6,7,8,9} 1
7. {(77 , 90), (96 , 58), (122 , 89)} {(78 , 90), (96 , 58), (122 , 88)} {1,2,3} 1
8. { (283 , 58),(141 , 55),(102 , 95)
(6 , 105), (236 , 248), (308 , 239),
(319 , 178), (46 , 235), (104 , 182),
(117 , 146), (66 , 140), (82 , 221),
(121 , 214), (194 , 265), (181 ,
106), (196 , 108), (130 , 108),
(18 , 42), (58 , 13)}
{(235 , 248), (282 , 213), (310 , 170),
(47 , 235), (104 , 182), (117 , 146),
(69 , 139), (83 , 221), (121 , 208),
(193 , 265), (180 , 106), (188 , 117),
(130 , 108), (19 , 42), (59 , 13) }
{5,481,159,8,9,10,49
,
12,108,14,15,168,17,
18,,19}
2
9. {(17 , 39), (65 , 18)} {(18 , 39), (64 , 18) } { 1, 2} 1
10. { (230 , 250), (271 , 63), (26 , 159)
}
{ (229 , 250), (270 , 63), (27 , 159) } { 1, 2,3} 2
International Journal of Application or Innovation in Engineering& Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 03, Issue 09, September 2014 ISSN 2319 - 4847
Volume 3, Issue 9, September 2014 Page 271
The above table shows the result of the system. In this initial states describes the initial points of the contours around
the boundary of interest and the convergent states are the states obtained by the newton Rapshon sequence which
locate exact points on the boundary of the objects. The object detected shows the object detected by image segmentation
using Poincare Map and Newton- Rapshon method,
5. CONCLUSION AND FUTURE WORK
In this paper, boundary extraction is achieved as well as the object segmentation is achieved with the help of Poincare
map method in the dynamical system. This method for boundary extraction and image segmentation is more accurate
as compared to the traditional ACMs. The ISAF field generated for the observed image have swirling component
which acts as the limit cycles in dynamical system which corresponding to the desired object. Then Poincare section is
generated for the ISAF field and the newton-raphson method is used to locate the convergent states on limit cycles and
in the end the boundaries of the object are represented by integral equation. The system also achieves multiple
boundary extraction by setting the initial points in the generated vector field and by generating the Poincare map for
each point and the newton-Raphson will calculate the fixed point for the Poincare map on the object boundary. Then
these fixed points on the object boundary are linked using the integral formula representing the edges and objects
present in the image. The system can be further extended to be done in a multiscale framework to enhance robustness of
the system.
References
[1] M. Kass, A. Witkin, and D.Terzopoulos, Snakes: Active contour models, Int. J. Comput. Vis., vol.1, pp. 321
331,1987.
[2] S. Osher and J. A. Sethian, Fronts propagating with curvature- dependent
speed: Algorithms based on HamiltonJacobi formulations, J. Comput. Phys., vol. 79, no. 1, pp. 1249, Nov.
1988.
[3] V. Caselles, R. Kimmel, and G. Sapiro, Geodesic active contours, Int. J. Comput. Vis., vol. 22, no. 1, pp. 6179,
Feb./Mar. 1997.
[4] C. Xu and J. L. Prince, Snake, shapes and gradient vector flow, IEEE Trans. Image Process., vol. 7, no. 3, pp.
359369, Mar. 1998.
[5] C. Xu and J. L. Prince, Generalized gradient vector flow external forces for active contours, Signal Process., vol.
71, no. 2, pp. 131139, Dec. 1998.R. Nicole, Title of paper with only first word capitalized, J. Name Stand.
Abbrev., in press.
[6] N. Paragios and R. Deriche, Geodesic active contours and level sets for the detection and tracking of moving
objects, IEEE Trans. Pattern Anal. ach. Intell., vol. 22, no. 3, pp. 266280, Mar. 2000.
[7] T. F. Chan and L. A. Vese, Active contours without edges, IEEE Trans. Image Process., vol. 10, no. 2, pp. 266
277, Feb. 2001
[8] M. Gastaud, M. Barlaud, and G. Aubert, Combining shape prior and
[9] statistical features for active contour segmentation, IEEE Trans Circuits Syst. Video Technol., vol. 14, no. 5, pp.
726734, May 2004.
[10] B. Li and S. T. Acton, Active contour external force using vector field convolution for image segmentation,
IEEE Trans. Image Process., vol. 16, no. 8, pp. 20962106, Aug. 2007.M. Young, The Technical Writers
Handbook. Mill Valley, CA: University Science, 1989.
AUTHOR
1. Miss. Ruchita V Indulkar pursuing PG degree in Computer Engineering from SVIT Chincholi, Nashik, University of Pune,
India.
2. Prof. S. D. Jondhale working as Associate Professor in Department of Computer Engineering, SVIT Chincholi, Nashik,
University of Pune, India.
You might also like
- Project InnerEye RSNA 2017 11 28Document46 pagesProject InnerEye RSNA 2017 11 28NicolásIgnacioFigueroaRamírezNo ratings yet
- Ai 900Document92 pagesAi 900Nguyen Duy Hai100% (2)
- Electronics: Active Contour Model Using Fast Fourier Transformation For Salient Object DetectionDocument20 pagesElectronics: Active Contour Model Using Fast Fourier Transformation For Salient Object DetectionsantoshNo ratings yet
- Two-Stage Object Tracking Method Based On Kernel and Active ContourDocument5 pagesTwo-Stage Object Tracking Method Based On Kernel and Active ContourVasuhi SamyduraiNo ratings yet
- Contourlet TransformDocument16 pagesContourlet TransformSiddharth PurohitNo ratings yet
- Contours in Image ProcessingDocument3 pagesContours in Image ProcessingAadil ShNo ratings yet
- Optical Flow: Exploring Dynamic Visual Patterns in Computer VisionFrom EverandOptical Flow: Exploring Dynamic Visual Patterns in Computer VisionNo ratings yet
- 2009 Good A New Quantum Edge Detection Algorithm For Medical Images 16438527Document7 pages2009 Good A New Quantum Edge Detection Algorithm For Medical Images 16438527Isram RasalNo ratings yet
- (X) Small Object Detection and Tracking - Algorithm, Analysis and Application (2005)Document10 pages(X) Small Object Detection and Tracking - Algorithm, Analysis and Application (2005)Hira RasabNo ratings yet
- Chandrajit Bajaj:, Edited by C. Bajaj C 1998 John Wiley & Sons LTDDocument33 pagesChandrajit Bajaj:, Edited by C. Bajaj C 1998 John Wiley & Sons LTDGoutam AgrawalNo ratings yet
- Thesis On Image Fusion Using Wavelet TransformDocument8 pagesThesis On Image Fusion Using Wavelet Transformcgvmxrief100% (2)
- Physically Based Methods For Tensor Field VisualizationDocument9 pagesPhysically Based Methods For Tensor Field VisualizationabrahamauduNo ratings yet
- Robust Planar Target Tracking and Pose Estimation From A Single ConcavityDocument7 pagesRobust Planar Target Tracking and Pose Estimation From A Single ConcavitydharmithNo ratings yet
- WebMedia CarolinaWatanabe Et AlDocument8 pagesWebMedia CarolinaWatanabe Et AlCarolina WatanabeNo ratings yet
- Ray SplatDocument9 pagesRay SplatMark Anthony Rodado MuncadaNo ratings yet
- A Novel Statistical Fusion Rule For Image Fusion and Its Comparison in Non Subsampled Contourlet Transform Domain and Wavelet DomainDocument19 pagesA Novel Statistical Fusion Rule For Image Fusion and Its Comparison in Non Subsampled Contourlet Transform Domain and Wavelet DomainIJMAJournalNo ratings yet
- 10.1.1.464.3408 VoronoiDocument32 pages10.1.1.464.3408 Voronoisoumya mondalNo ratings yet
- Learning-Based Nonparametric Autofocusing For Digital HolographyDocument8 pagesLearning-Based Nonparametric Autofocusing For Digital Holographywangxz1983No ratings yet
- University of Zawia Faculty of Engineering: Performance of Different Transforms On Image ContourDocument51 pagesUniversity of Zawia Faculty of Engineering: Performance of Different Transforms On Image ContourAhmed HwaidiNo ratings yet
- Contour Detection and Hierarchical Image SegmentationDocument19 pagesContour Detection and Hierarchical Image SegmentationQuynhtrang NguyenNo ratings yet
- Learning Conditional Photometric Stereo With High-Resolution FeaturesDocument14 pagesLearning Conditional Photometric Stereo With High-Resolution Featuresifte5104385No ratings yet
- Contourlet Txform 3Document16 pagesContourlet Txform 3Ayreine NisyaNo ratings yet
- 2019 Zhang Jiang Zhao Rapid Two Dim Unwrapping Deep LearningDocument13 pages2019 Zhang Jiang Zhao Rapid Two Dim Unwrapping Deep LearningDiego Eusse NaranjoNo ratings yet
- 10 TAIMA 2015 InesDocument6 pages10 TAIMA 2015 InesSlim MhiriNo ratings yet
- Scale Space and Anisotropic Diffusion: Laplacian Gradient DivergenceDocument21 pagesScale Space and Anisotropic Diffusion: Laplacian Gradient DivergenceArkaprava BhowmikNo ratings yet
- Image Mosaic With Relaxed Motion: Jiejie Zhu Bin LuoDocument21 pagesImage Mosaic With Relaxed Motion: Jiejie Zhu Bin LuoJain DeepakNo ratings yet
- Moving Object Tracking in Video Using MATLABDocument5 pagesMoving Object Tracking in Video Using MATLABSumeet SauravNo ratings yet
- Base PaperDocument6 pagesBase Paperwa5jeedNo ratings yet
- Phase-Driven Finite Element Model For Spatio-Temporal Tracking in Tagged Cardiac MRIDocument8 pagesPhase-Driven Finite Element Model For Spatio-Temporal Tracking in Tagged Cardiac MRIJeremias TabordaNo ratings yet
- A Face Recognition Scheme Based On Principle Component Analysis and Wavelet DecompositionDocument5 pagesA Face Recognition Scheme Based On Principle Component Analysis and Wavelet DecompositionInternational Organization of Scientific Research (IOSR)No ratings yet
- Visualization Paradigms: University of Texas, AustinDocument30 pagesVisualization Paradigms: University of Texas, AustinabrahamauduNo ratings yet
- 1997 Globally Consistent Range Scan Alignment For Environment MappingDocument31 pages1997 Globally Consistent Range Scan Alignment For Environment MappingJosé FerrãoNo ratings yet
- Boundary Detection in Medical Images Using Edge Following Algorithm Based On Intensity Gradient and Texture Gradient FeaturesDocument7 pagesBoundary Detection in Medical Images Using Edge Following Algorithm Based On Intensity Gradient and Texture Gradient FeaturesAneesh JainNo ratings yet
- Implementation of Medical Image Fusion Using DWT Process On FPGADocument4 pagesImplementation of Medical Image Fusion Using DWT Process On FPGAATSNo ratings yet
- SURF Bay2006 - Chapter - SURFSpeededUpRobustFeaturesDocument14 pagesSURF Bay2006 - Chapter - SURFSpeededUpRobustFeaturesElielLinsNo ratings yet
- Sensors: Defocus Blur Detection and Estimation From Imaging SensorsDocument15 pagesSensors: Defocus Blur Detection and Estimation From Imaging SensorsCodingTonicNo ratings yet
- Efficient Image RetrievalDocument14 pagesEfficient Image RetrievalMarchelius KalvinNo ratings yet
- Densepose: Dense Human Pose Estimation in The Wild: Seminar: Vision Systems Ma-Inf 4208Document10 pagesDensepose: Dense Human Pose Estimation in The Wild: Seminar: Vision Systems Ma-Inf 4208Jelena TrajkovicNo ratings yet
- Research ArticleDocument14 pagesResearch ArticlenkncnNo ratings yet
- (IJET-V1I6P15) Authors: Sadhana Raut, Poonam Rohani, Sumera Shaikh, Tehesin Shikilkar, Mrs. G. J. ChhajedDocument7 pages(IJET-V1I6P15) Authors: Sadhana Raut, Poonam Rohani, Sumera Shaikh, Tehesin Shikilkar, Mrs. G. J. ChhajedInternational Journal of Engineering and TechniquesNo ratings yet
- Motion Estimation For Moving Target DetectionDocument9 pagesMotion Estimation For Moving Target DetectionSatyam ShandilyaNo ratings yet
- Fast and Subpixel Precise Blob Detection and AttributionDocument4 pagesFast and Subpixel Precise Blob Detection and AttributionFelix FergosenNo ratings yet
- Bostan 1601 PDocument11 pagesBostan 1601 PissayedNo ratings yet
- Presentation Title: Subheading Goes HereDocument54 pagesPresentation Title: Subheading Goes HereAhmed HwaidiNo ratings yet
- Tracking Kidney Tumor Dimensional Measurements Via Image MorphingDocument4 pagesTracking Kidney Tumor Dimensional Measurements Via Image MorphingkmchistiNo ratings yet
- Question 1-Explain The Process of Formation of Image in Human EyeDocument6 pagesQuestion 1-Explain The Process of Formation of Image in Human EyeDebapriya SahooNo ratings yet
- A Principal Component Regression Strategy For Estimating Motion Eng Opt 2008Document8 pagesA Principal Component Regression Strategy For Estimating Motion Eng Opt 2008ShadowNo ratings yet
- 08.21.what Went WhereDocument8 pages08.21.what Went WhereAlessioNo ratings yet
- Region Contrast Based Salient Object Detection: Sayali Doifode, Prof.M.B.ZalteDocument3 pagesRegion Contrast Based Salient Object Detection: Sayali Doifode, Prof.M.B.ZalteerpublicationNo ratings yet
- Mobile Robot Navigation in A Corridor Using Visual OdometryDocument6 pagesMobile Robot Navigation in A Corridor Using Visual OdometryEbit Nur AlfianNo ratings yet
- 1 s2.0 S0030401821000316 MainDocument14 pages1 s2.0 S0030401821000316 MainRustin PurplemanNo ratings yet
- A Level Set Approach To Image Segmentation With Intensity InhomogeneityDocument12 pagesA Level Set Approach To Image Segmentation With Intensity InhomogeneityDr-Priyadarsan ParidaNo ratings yet
- Detection of Human Motion: Adopting Machine and Deep LearningDocument8 pagesDetection of Human Motion: Adopting Machine and Deep LearningPavithra iyerNo ratings yet
- Integrated Denoising and Unwrapping of Insar Phase Based On Markov Random FieldsDocument13 pagesIntegrated Denoising and Unwrapping of Insar Phase Based On Markov Random FieldsSakthidasan SankaranNo ratings yet
- Edge Detection and Geometric Feature Extraction of A Burner's Jet in FNBZ Images Using Seeded Region Growing AlgorithmDocument5 pagesEdge Detection and Geometric Feature Extraction of A Burner's Jet in FNBZ Images Using Seeded Region Growing AlgorithmAnonymous PkeI8e84RsNo ratings yet
- Image Restoration by Learning Morphological Opening-Closing NetworkDocument21 pagesImage Restoration by Learning Morphological Opening-Closing NetworkMuhammad Awais ShahNo ratings yet
- Geodesic Active Contours: International Journal of Computer Vision February 1997Document28 pagesGeodesic Active Contours: International Journal of Computer Vision February 1997Unaixa KhanNo ratings yet
- Simplified Novel Method For Edge Detection in Digital ImagesDocument6 pagesSimplified Novel Method For Edge Detection in Digital ImagesBasanagouda NavadagiNo ratings yet
- Sketch-to-Sketch Match With Dice Similarity MeasuresDocument6 pagesSketch-to-Sketch Match With Dice Similarity MeasuresInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Improved Edge Detection in SAR Color ImagesDocument5 pagesAn Improved Edge Detection in SAR Color ImagesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Moving Object Detection Using Local Binary Pattern and Gaussian Background ModelDocument10 pagesMoving Object Detection Using Local Binary Pattern and Gaussian Background ModelJEEVIT HNo ratings yet
- Active Contour: Advancing Computer Vision with Active Contour TechniquesFrom EverandActive Contour: Advancing Computer Vision with Active Contour TechniquesNo ratings yet
- THE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSDocument7 pagesTHE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Detection of Malicious Web Contents Using Machine and Deep Learning ApproachesDocument6 pagesDetection of Malicious Web Contents Using Machine and Deep Learning ApproachesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Study of Customer Experience and Uses of Uber Cab Services in MumbaiDocument12 pagesStudy of Customer Experience and Uses of Uber Cab Services in MumbaiInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Soil Stabilization of Road by Using Spent WashDocument7 pagesSoil Stabilization of Road by Using Spent WashInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDocument8 pagesDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Analysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyDocument6 pagesAnalysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Mexican Innovation System: A System's Dynamics PerspectiveDocument12 pagesThe Mexican Innovation System: A System's Dynamics PerspectiveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)Document10 pagesA Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Performance of Short Transmission Line Using Mathematical MethodDocument8 pagesPerformance of Short Transmission Line Using Mathematical MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Deep Learning Based Assistant For The Visually ImpairedDocument11 pagesA Deep Learning Based Assistant For The Visually ImpairedInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Staycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityDocument10 pagesStaycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Anchoring of Inflation Expectations and Monetary Policy Transparency in IndiaDocument9 pagesAnchoring of Inflation Expectations and Monetary Policy Transparency in IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Ijaiem 2021 01 28 6Document9 pagesIjaiem 2021 01 28 6International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Impact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryDocument8 pagesImpact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Synthetic Datasets For Myocardial Infarction Based On Actual DatasetsDocument9 pagesSynthetic Datasets For Myocardial Infarction Based On Actual DatasetsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationDocument13 pagesDesign and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Swot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictDocument5 pagesSwot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaDocument5 pagesThe Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Potato StudyDocument12 pagesPotato StudynatashajamianNo ratings yet
- To Be Familiar With Image Transformations in Spatial Domain and Frequency DomainDocument2 pagesTo Be Familiar With Image Transformations in Spatial Domain and Frequency Domainsupriya.dubeyNo ratings yet
- Detection Crack in Image Using Otsu Method and Multiple Filtering in Image Processing Techniques 05Document4 pagesDetection Crack in Image Using Otsu Method and Multiple Filtering in Image Processing Techniques 05Arif ZafarNo ratings yet
- Rocognition of Vehicle Plate Number Using MatlabDocument9 pagesRocognition of Vehicle Plate Number Using Matlab0577 Shirisha BethiNo ratings yet
- Classification of Brain Tumours Using Genetic Algorithms As A Feature Selection Method (GAFS)Document6 pagesClassification of Brain Tumours Using Genetic Algorithms As A Feature Selection Method (GAFS)PAVITHRA M 1974312No ratings yet
- Classification of MC Clusters in Digital Mammography Via Haralick Descriptors and Heuristic Embedded Feature Selection MethodDocument7 pagesClassification of MC Clusters in Digital Mammography Via Haralick Descriptors and Heuristic Embedded Feature Selection MethodUbiquitous Computing and Communication JournalNo ratings yet
- OsiriX Segmentation PluginDocument26 pagesOsiriX Segmentation Pluginaycan Digitalsysteme GmbHNo ratings yet
- 2013 - 2014 Image Processing Project TitlesDocument2 pages2013 - 2014 Image Processing Project Titlesbluechip_projectsNo ratings yet
- Image Compression Based On Wavelet, Polynomial and QuadtreeDocument6 pagesImage Compression Based On Wavelet, Polynomial and QuadtreeLucian PalieviciNo ratings yet
- 3D Reconstruction of Human Body Via Machine Learning Qi HeDocument59 pages3D Reconstruction of Human Body Via Machine Learning Qi Hehithyshi dcNo ratings yet
- One-Dimensional Microaneurysm Feature Sequence Segmentation in Fundus ImagesDocument19 pagesOne-Dimensional Microaneurysm Feature Sequence Segmentation in Fundus Imagesyt HehkkeNo ratings yet
- Imageprocessing 131106054802 Phpapp01Document41 pagesImageprocessing 131106054802 Phpapp01Dr Suganya DeviNo ratings yet
- Clustering MethodsDocument29 pagesClustering MethodsAdil HaNo ratings yet
- (Interdisciplinary Applied Mathematics 40) René Vidal, Yi Ma, S.S. Sastry (Auth.) - Generalized Principal Component Analysis-Springer-Verlag New York (2016)Document590 pages(Interdisciplinary Applied Mathematics 40) René Vidal, Yi Ma, S.S. Sastry (Auth.) - Generalized Principal Component Analysis-Springer-Verlag New York (2016)K&G PAPOULIASNo ratings yet
- 2021 ICPR FASSDNetDocument8 pages2021 ICPR FASSDNetsimonfxNo ratings yet
- Computer Vision Sheet (3) : Recognition, Feature Extraction, SegmentationDocument3 pagesComputer Vision Sheet (3) : Recognition, Feature Extraction, SegmentationHussein Mohamad ElnaggarNo ratings yet
- J CMPB 2020 105398Document33 pagesJ CMPB 2020 105398Fahad RazaNo ratings yet
- Vibration Analysis For Large-Scale Wind Turbine Blade Bearing Fault Detection With An Empirical Wavelet Thresholding MethodDocument24 pagesVibration Analysis For Large-Scale Wind Turbine Blade Bearing Fault Detection With An Empirical Wavelet Thresholding MethodAkash RockNo ratings yet
- Wai Hnin Eaindrar MG Paper v2Document17 pagesWai Hnin Eaindrar MG Paper v2waihnineaindrar mgNo ratings yet
- Seminar Report On Object Detection and TrackingDocument54 pagesSeminar Report On Object Detection and TrackingPravin KumarNo ratings yet
- Luis 18Document129 pagesLuis 18José santanaNo ratings yet
- FF 180 Project Registration and Progress Review (Repaired)Document5 pagesFF 180 Project Registration and Progress Review (Repaired)Yash WaghNo ratings yet
- Fingerprint Recognition: by WUZHILI (99050056)Document44 pagesFingerprint Recognition: by WUZHILI (99050056)Srinivas Mandava100% (1)
- Binocular Hands and Head Tracking Using Projective Joint Probabilistic Data Association FilterDocument50 pagesBinocular Hands and Head Tracking Using Projective Joint Probabilistic Data Association FilterMiyabi MayoNo ratings yet
- Image Segmentation Digital Image ProcessingDocument48 pagesImage Segmentation Digital Image Processingrao001No ratings yet
- Deep Learning Method of Landslide Inventory Map With Imbalanced Samples in Optical Remote SensingDocument17 pagesDeep Learning Method of Landslide Inventory Map With Imbalanced Samples in Optical Remote Sensingnicolascabellos99No ratings yet
- International Society For Technology in Arthroplasty - Indicação de ArtigosDocument77 pagesInternational Society For Technology in Arthroplasty - Indicação de ArtigosJosé santanaNo ratings yet
- IEEE 2020-2021 MATLAB Project TitilesDocument3 pagesIEEE 2020-2021 MATLAB Project TitilesANAND KRISHNANNo ratings yet