Download as pdf or txt
You might also like
- Bess EtapDocument32 pagesBess Etapyeprem82No ratings yet
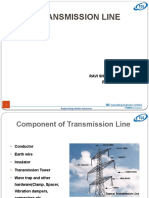
- Manual On Transmission Line TowersDocument58 pagesManual On Transmission Line TowersKamalanathan Rajeshkumar91% (35)
- ACB ManualDocument42 pagesACB Manual4usangeetNo ratings yet
- Story of Electricity (Tell Me Why #126) (Gnv64)Document98 pagesStory of Electricity (Tell Me Why #126) (Gnv64)Rama Krishna100% (7)
- Low Container Ship Speed Facilitated by Versatile ME/ME-C EnginesDocument12 pagesLow Container Ship Speed Facilitated by Versatile ME/ME-C EnginesParthiban NagarajanNo ratings yet
- Analysis of Very FastDocument6 pagesAnalysis of Very FastFelipe BittarNo ratings yet
- Islanding Detection Algorithm For Inverter Based Distributed Generation Using Positive Sequence of Load VoltageDocument4 pagesIslanding Detection Algorithm For Inverter Based Distributed Generation Using Positive Sequence of Load VoltageRama KrishnaNo ratings yet
- DG For Power QualityDocument4 pagesDG For Power Qualitypardhu_y4No ratings yet
- Passive and Active Methods of Islanding For PV Systems: KeywordsDocument10 pagesPassive and Active Methods of Islanding For PV Systems: KeywordsBertony QuemasdaNo ratings yet
- k1 FCL DigSilentDocument8 pagesk1 FCL DigSilentksg9731No ratings yet
- Analysis of The Behavior of One Digital Distance Relay Under Islanding Condition With ATPDocument6 pagesAnalysis of The Behavior of One Digital Distance Relay Under Islanding Condition With ATPJaime Florez ChoqueNo ratings yet
- Enhancement of Islanding-Detection of Distributed Generation Systems Via Wavelet TransformDocument6 pagesEnhancement of Islanding-Detection of Distributed Generation Systems Via Wavelet TransformawhanNo ratings yet
- Testing The Islanding Protection Function For PVDocument6 pagesTesting The Islanding Protection Function For PVDeepak GehlotNo ratings yet
- A New Control Structure For Grid-Connected LCLDocument7 pagesA New Control Structure For Grid-Connected LCLpmih1No ratings yet
- Digital CMOS Logic Operation in The Sub-Threshold Region: Hendrawan Soeleman and Kaushik RoyDocument6 pagesDigital CMOS Logic Operation in The Sub-Threshold Region: Hendrawan Soeleman and Kaushik Royphanindra21No ratings yet
- Algorithm For Single Phase-To-Ground Fault Digital Distance RelayDocument7 pagesAlgorithm For Single Phase-To-Ground Fault Digital Distance RelayAnonymous vLerKYANo ratings yet
- 110Document16 pages110A FirdausNo ratings yet
- Novel Technique For Fault Location Estimation On Parallel Transmission Lines Using WaveletDocument7 pagesNovel Technique For Fault Location Estimation On Parallel Transmission Lines Using WaveletRachana MeenaNo ratings yet
- An Adaptive Reactive Power Perturbation Based Hybrid Islanding Detection Method For Distributed Generation SystemsDocument12 pagesAn Adaptive Reactive Power Perturbation Based Hybrid Islanding Detection Method For Distributed Generation SystemsDattaraya GaonkarNo ratings yet
- Impact of DG Interface Control On Islanding Detection and Nondetection ZonesDocument9 pagesImpact of DG Interface Control On Islanding Detection and Nondetection ZonesahmedrizwanchampNo ratings yet
- International Journal of Research in Computer Applications and RoboticsDocument8 pagesInternational Journal of Research in Computer Applications and Roboticsakashgrg07No ratings yet
- Turkish PDFDocument13 pagesTurkish PDFramiNo ratings yet
- A Wavelet-Based Algorithm For Disturbances Detection Using Oscillographic DataDocument6 pagesA Wavelet-Based Algorithm For Disturbances Detection Using Oscillographic DataVijay KrishnaNo ratings yet
- A Method For Power Conditioning With Harmonic Reduction in MicrogridsDocument6 pagesA Method For Power Conditioning With Harmonic Reduction in MicrogridsINder DǝǝpNo ratings yet
- RP P9788770229630C11Document10 pagesRP P9788770229630C11srikanth velpulaNo ratings yet
- Jecet: Journal of Electronics and Communication Engineering & Technology (JECET)Document11 pagesJecet: Journal of Electronics and Communication Engineering & Technology (JECET)IAEME PublicationNo ratings yet
- Ground Fault Over VoltagesDocument7 pagesGround Fault Over Voltagespistola2No ratings yet
- ExtraDocument6 pagesExtraRaja SekarNo ratings yet
- Robust Non-Communication Line Protection Scheme Using Novel QuantitiesDocument8 pagesRobust Non-Communication Line Protection Scheme Using Novel QuantitiessunitharajababuNo ratings yet
- Frequency RelayDocument9 pagesFrequency RelayLanya AramNo ratings yet
- An Islanding Detection Method For Distributed Generations Using Voltage Unbalance and Total Harmonic Distortion of Current-2004 PDFDocument8 pagesAn Islanding Detection Method For Distributed Generations Using Voltage Unbalance and Total Harmonic Distortion of Current-2004 PDFAnthony HillNo ratings yet
- Active Filters in AerospaceDocument9 pagesActive Filters in Aerospacesalty pepperNo ratings yet
- The Optimal Location Load Shedding Using Electrical DistancesDocument5 pagesThe Optimal Location Load Shedding Using Electrical DistancesRAJESH KUMARNo ratings yet
- Adaptive Single Pole Auto-Reclosing Using Discrete Wavelet TransformDocument14 pagesAdaptive Single Pole Auto-Reclosing Using Discrete Wavelet TransformmosojiNo ratings yet
- Digital Differential Relaying Scheme For Teed Circuits Based On Voltage and Current Signal ComparisonDocument10 pagesDigital Differential Relaying Scheme For Teed Circuits Based On Voltage and Current Signal ComparisonKumar DhirajNo ratings yet
- Anki A Unified Control Strategy For Three-Phase Inverter PDFDocument16 pagesAnki A Unified Control Strategy For Three-Phase Inverter PDFRavi KumarNo ratings yet
- A Comparative Study of Matlab Results and VHDL Analysis of DWT For Efficient Power SystemsDocument7 pagesA Comparative Study of Matlab Results and VHDL Analysis of DWT For Efficient Power SystemsAdriana Daniela SanduNo ratings yet
- Power Quality Detection in Distribution System With Wind Energy Penetration Using Discrete Wavelet TransformDocument6 pagesPower Quality Detection in Distribution System With Wind Energy Penetration Using Discrete Wavelet TransformDavid PerezNo ratings yet
- Transformer REFDocument4 pagesTransformer REFs_banerjeeNo ratings yet
- Analysis and Review - Secondary Arc Extinction Auto Reclosing For 765 KV EHV TLDocument3 pagesAnalysis and Review - Secondary Arc Extinction Auto Reclosing For 765 KV EHV TLCarlos Lino Rojas AgüeroNo ratings yet
- A New High-Efficiency Single-Phase Transformerless PV Inverter TopologyDocument8 pagesA New High-Efficiency Single-Phase Transformerless PV Inverter TopologyMohamed SaidNo ratings yet
- Fault Isolation in Distributed Generation ConnectedDocument24 pagesFault Isolation in Distributed Generation ConnectedQais AlsafasfehNo ratings yet
- IJEEE - Protection Scheme For Renewable Energy Sources Based Smart Grid Using Stockwell Transform and Rule Based Decision TreeDocument18 pagesIJEEE - Protection Scheme For Renewable Energy Sources Based Smart Grid Using Stockwell Transform and Rule Based Decision Treeiaset123No ratings yet
- Wavelet-Based Transmission Line Fault Detection and ClassificationDocument6 pagesWavelet-Based Transmission Line Fault Detection and ClassificationMohit Kumar ChowdaryNo ratings yet
- XMR AzDocument9 pagesXMR AzbitconceptsNo ratings yet
- APEC UploadDocument5 pagesAPEC UploadDulal MannaNo ratings yet
- New Technique For Computation of Closest Hopf Bifurcation Point Using Real-Coded Genetic AlgorithmDocument8 pagesNew Technique For Computation of Closest Hopf Bifurcation Point Using Real-Coded Genetic AlgorithmJosaphat GouveiaNo ratings yet
- Energies: The Impact of PLL Dynamics On The Low Inertia Power Grid: A Case Study of Bonaire Island Power SystemDocument16 pagesEnergies: The Impact of PLL Dynamics On The Low Inertia Power Grid: A Case Study of Bonaire Island Power SystembenjaxxNo ratings yet
- J4 Distortion Correction CircuitsDocument8 pagesJ4 Distortion Correction CircuitsАлексей ГрабкоNo ratings yet
- Ext A Microgrid Based On Wind Driven DFIG, DG and Solar PV Array For Optimal Fuel ConsumptionDocument49 pagesExt A Microgrid Based On Wind Driven DFIG, DG and Solar PV Array For Optimal Fuel Consumptionsrimatrika enterprisesNo ratings yet
- Tech Con 2011 Kruger New Experience With Diagn Meas On PTDocument15 pagesTech Con 2011 Kruger New Experience With Diagn Meas On PTMichael KrügerNo ratings yet
- 06714863Document6 pages06714863Miguel LnNo ratings yet
- IgbtDocument7 pagesIgbtelvergonzalez1No ratings yet
- Reduction of Electromagnetic Interference in DC-DC Converter Using ChaosDocument4 pagesReduction of Electromagnetic Interference in DC-DC Converter Using ChaosPrasenjit WakodeNo ratings yet
- Partial Discharge Diagnosis On Large Power TransformersDocument6 pagesPartial Discharge Diagnosis On Large Power TransformersDiego VidarteNo ratings yet
- CIGRE-107 Fault Location in Extra Long HVDC Transmission Lines Using Discrete Wavelet TransformDocument9 pagesCIGRE-107 Fault Location in Extra Long HVDC Transmission Lines Using Discrete Wavelet TransformkamuikNo ratings yet
- A Wavelet Power Based Algorithm For Synchronous Generator ProtectionDocument6 pagesA Wavelet Power Based Algorithm For Synchronous Generator ProtectionsunitharajababuNo ratings yet
- Maximum Power Point Tracking Using Fuzzy Logic Controller Under Partial ConditionsDocument14 pagesMaximum Power Point Tracking Using Fuzzy Logic Controller Under Partial Conditionsaravindan476No ratings yet
- Proceedings of The Institution of Mechanical Engineers, Part D - Journal of Automobile Engineering-2008-Neubauer-1141-51Document12 pagesProceedings of The Institution of Mechanical Engineers, Part D - Journal of Automobile Engineering-2008-Neubauer-1141-51neerajhmenonNo ratings yet
- Subsequence Action To Eliminate Blackout After Detecting Islanding Using Solid State Transfer Switch Implemented in PSCAD/EMTDCDocument8 pagesSubsequence Action To Eliminate Blackout After Detecting Islanding Using Solid State Transfer Switch Implemented in PSCAD/EMTDCAnand Kumar NaleNo ratings yet
- Icbdm 29 PDFDocument6 pagesIcbdm 29 PDFPudhur Kannan ManiNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringFrom EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Fileupload 210412 8429Document5 pagesFileupload 210412 8429Rama KrishnaNo ratings yet
- 132kv KURNOOLDocument2 pages132kv KURNOOLRama KrishnaNo ratings yet
- General Consumer: Sand Transaction ReceiptDocument1 pageGeneral Consumer: Sand Transaction ReceiptRama KrishnaNo ratings yet
- M.tech ThesisDocument59 pagesM.tech ThesisRama Krishna100% (1)
- Signature/valid: File NO.I&PW-A3/171/2018-FINDocument1 pageSignature/valid: File NO.I&PW-A3/171/2018-FINRama KrishnaNo ratings yet
- Chapter - 3 Multi Level Inverters 3.1 InverterDocument8 pagesChapter - 3 Multi Level Inverters 3.1 InverterRama KrishnaNo ratings yet
- Maps/Excel Sheets/400kv SSDocument1 pageMaps/Excel Sheets/400kv SSRama KrishnaNo ratings yet
- Spouse Certificate: Declaration by The Teacher Applying Under SpouseDocument7 pagesSpouse Certificate: Declaration by The Teacher Applying Under SpouseRama KrishnaNo ratings yet
- Name of The Former RS - No Location Number Name of The Tree Girth Hight 1 Chelikani Kishore Kumar 217-1A-2 117/0 TeakDocument9 pagesName of The Former RS - No Location Number Name of The Tree Girth Hight 1 Chelikani Kishore Kumar 217-1A-2 117/0 TeakRama KrishnaNo ratings yet
- Transmission Line: Ravi Shankar Singh (E6S304)Document44 pagesTransmission Line: Ravi Shankar Singh (E6S304)amit143263No ratings yet
- RK ContractorsDocument1 pageRK ContractorsRama KrishnaNo ratings yet
- 75 - Modeling & Simulation of Solid State TransformerDocument8 pages75 - Modeling & Simulation of Solid State TransformerRama KrishnaNo ratings yet
- New Doc 2017-03-30Document1 pageNew Doc 2017-03-30Rama KrishnaNo ratings yet
- Aerospace America May 2017Document68 pagesAerospace America May 2017Rama KrishnaNo ratings yet
- Excel Tip & Excel Forum: 250 Ms-Excel Keyboard ShortcutsDocument17 pagesExcel Tip & Excel Forum: 250 Ms-Excel Keyboard ShortcutsRama KrishnaNo ratings yet
- Solid State TransformerDocument12 pagesSolid State TransformerRama Krishna100% (1)
- On Load Tap ChangersDocument42 pagesOn Load Tap ChangersRama Krishna100% (2)
- BIbiliography Power Plant EngineeringDocument7 pagesBIbiliography Power Plant Engineeringpramodarya1No ratings yet
- HUAWEI Distributed Power System DatasheetDocument3 pagesHUAWEI Distributed Power System DatasheetAndreiTanaseNo ratings yet
- EU Energy LawDocument14 pagesEU Energy LawAdnan AkhtarNo ratings yet
- 00 Datasheet of STS For 200 - 215KTL - Others - 20210928Document4 pages00 Datasheet of STS For 200 - 215KTL - Others - 20210928Antonio CanalesNo ratings yet
- Bohecoo 034751Document3 pagesBohecoo 034751Jessica CindyNo ratings yet
- LS-VINA - MV - CatalogueDocument12 pagesLS-VINA - MV - CatalogueVietAnh NguyenNo ratings yet
- GR 7 Term 1 2019 Ns Lesson PlanDocument215 pagesGR 7 Term 1 2019 Ns Lesson PlanPusetso RamphomaNo ratings yet
- Numerical Residual Voltage - Neutral Displacement RelayDocument4 pagesNumerical Residual Voltage - Neutral Displacement RelaySumit SinghNo ratings yet
- Principals of Electrical Engineering: University of Benghazi Faculty of Engineering Industrial Engineering DepartmentDocument14 pagesPrincipals of Electrical Engineering: University of Benghazi Faculty of Engineering Industrial Engineering DepartmentRawad SalemNo ratings yet
- Keməstrē/: Learn To PronounceDocument26 pagesKeməstrē/: Learn To PronounceahgaseX JJpsNo ratings yet
- Energy StarDocument2 pagesEnergy StarsandyolkowskiNo ratings yet
- PI734EDocument8 pagesPI734E3efooNo ratings yet
- 11th Final PhysicsDocument5 pages11th Final Physicsanand tiwariNo ratings yet
- Welcome To The Seminar On MICROTURBINESDocument13 pagesWelcome To The Seminar On MICROTURBINESAnonymous vxNf3n3yMNo ratings yet
- Curriculum Vitae: Muhammad AlamDocument3 pagesCurriculum Vitae: Muhammad Alammuhammad arifNo ratings yet
- FOOD PREPARATION AREA (KITCHEN) Although The Food Preparation Area, or Kitchen, Is Listed in The SupportDocument1 pageFOOD PREPARATION AREA (KITCHEN) Although The Food Preparation Area, or Kitchen, Is Listed in The SupportĐức ToànNo ratings yet
- FRC SeriesDocument1 pageFRC SeriesSeptiawanWandaNo ratings yet
- Vapor Recovery ProcessDocument7 pagesVapor Recovery ProcessYagnesh JoshiNo ratings yet
- Protect8.31-20kVA - 26476-00 - REV1Document12 pagesProtect8.31-20kVA - 26476-00 - REV1Dodi HarzetyaNo ratings yet
- Preliminary Results of Indonesia Electrified Vehicle Comprehensive StudyDocument36 pagesPreliminary Results of Indonesia Electrified Vehicle Comprehensive StudyMuhammad Ma'rufNo ratings yet
- Zieleman, G - PresentationDocument19 pagesZieleman, G - Presentationgosalhs9395No ratings yet
- Energies: Voltage-Sensorless Control Scheme For A Grid Connected Inverter Using Disturbance ObserverDocument19 pagesEnergies: Voltage-Sensorless Control Scheme For A Grid Connected Inverter Using Disturbance ObserverEngr ImmiNo ratings yet
- Et214 2005 PDFDocument17 pagesEt214 2005 PDFNirmal mehtaNo ratings yet
- Protection & CoordinationDocument43 pagesProtection & CoordinationFrancisco Andrade100% (3)
- Characteristics: Compact Size Ideal For Any Type of UseDocument3 pagesCharacteristics: Compact Size Ideal For Any Type of UseVanegas YennyNo ratings yet
- Plta MerangkumDocument21 pagesPlta MerangkumOksiil ShelaNo ratings yet
- Lutz Diferentes Tipos Motores PDFDocument1 pageLutz Diferentes Tipos Motores PDFPatricia J ÁngelesNo ratings yet