
Pattern Recognition: Zheng Pan, Changshui Zhang
Pattern Recognition: Zheng Pan, Changshui Zhang
You might also like
- Tutorial XfoilDocument12 pagesTutorial XfoilArley MogollonNo ratings yet
- BPSK DFE Vs MLSE EqualisationDocument19 pagesBPSK DFE Vs MLSE EqualisationJaime FouchéNo ratings yet
- Capitulo 2Document41 pagesCapitulo 2Alan Orlando Sanchez MarzanNo ratings yet
- Minimum Distance EstimatorsDocument65 pagesMinimum Distance EstimatorssepwandjitanguepNo ratings yet
- Statistical Testing and Prediction Using Linear Regression: AbstractDocument10 pagesStatistical Testing and Prediction Using Linear Regression: AbstractDheeraj ChavanNo ratings yet
- University of Minnesota and Facultad de Ingenier Ia Qu Imica, UNL. Researcher of CONICETDocument21 pagesUniversity of Minnesota and Facultad de Ingenier Ia Qu Imica, UNL. Researcher of CONICETLiliana ForzaniNo ratings yet
- Chapter 6Document5 pagesChapter 6Nermine LimemeNo ratings yet
- International Statistical Institute (ISI)Document15 pagesInternational Statistical Institute (ISI)Guilherme MartheNo ratings yet
- Quantile Regression (Final) PDFDocument22 pagesQuantile Regression (Final) PDFbooianca100% (1)
- Performance Analysis of Regularized Linear Regression Models For Oxazolines and Oxazoles Derivatives Descriptor DatasetDocument13 pagesPerformance Analysis of Regularized Linear Regression Models For Oxazolines and Oxazoles Derivatives Descriptor DatasetAnonymous F1whTRNo ratings yet
- Comparison of Fatigue Data Using The Maximum Likelihood MethodDocument12 pagesComparison of Fatigue Data Using The Maximum Likelihood MethodtommasobrugoNo ratings yet
- Admin - JSDS, Oc 4. Journal Welly Fransiska-WAG-BedahDocument11 pagesAdmin - JSDS, Oc 4. Journal Welly Fransiska-WAG-BedahhanaNo ratings yet
- Chapter 6 Var Granger Causality TestsDocument27 pagesChapter 6 Var Granger Causality TestsTafirenyika SundeNo ratings yet
- Chapter 2 Simple Linear RegressionDocument60 pagesChapter 2 Simple Linear RegressionChriss TwhNo ratings yet
- Robust Estimation of Between and Within Laboratory Standard Deviation With Measurement Results Below The Detection LimitDocument7 pagesRobust Estimation of Between and Within Laboratory Standard Deviation With Measurement Results Below The Detection Limitds17am003No ratings yet
- Environmental Data Sets With Below Detection Limit ObservationsDocument27 pagesEnvironmental Data Sets With Below Detection Limit Observationsdante1419828327No ratings yet
- 2021 - Solving Multistage Stochastic Linear Programming Via Regularized Linear Decision Rules. An Application To Hydrothermal Dispatch PlanningDocument35 pages2021 - Solving Multistage Stochastic Linear Programming Via Regularized Linear Decision Rules. An Application To Hydrothermal Dispatch PlanningAlejandro AnguloNo ratings yet
- The Problem of Overfitting: PerspectiveDocument12 pagesThe Problem of Overfitting: PerspectiveManoj SharmaNo ratings yet
- Stopping Criteria For A Constrained Single-Objective Particle Swarm Optimization AlgorithmDocument10 pagesStopping Criteria For A Constrained Single-Objective Particle Swarm Optimization AlgorithmLittle PrincessNo ratings yet
- Aspects of Linear Stability Analysis For Higher-Order Finite-Difference MethodsDocument11 pagesAspects of Linear Stability Analysis For Higher-Order Finite-Difference MethodsKarthikPrakashNo ratings yet
- A Well-Conditioned Estimator For Large-Dimensional Covariance MatricesDocument47 pagesA Well-Conditioned Estimator For Large-Dimensional Covariance MatricesGgggggNo ratings yet
- Module 4: Regression Shrinkage MethodsDocument5 pagesModule 4: Regression Shrinkage Methods205Abhishek KotagiNo ratings yet
- Regression AnalysisDocument7 pagesRegression AnalysisshoaibNo ratings yet
- EDA 4th ModuleDocument26 pagesEDA 4th Module205Abhishek KotagiNo ratings yet
- Shrinkage Regression: Rolf Sundberg Volume 4, PP 1994-1998 inDocument5 pagesShrinkage Regression: Rolf Sundberg Volume 4, PP 1994-1998 inMiguel Angel Gonzalez VargasNo ratings yet
- Observer Design For LPV Systems With Uncertain Measurements On Scheduling Variables: Application To An Electric Ground VehicleDocument12 pagesObserver Design For LPV Systems With Uncertain Measurements On Scheduling Variables: Application To An Electric Ground Vehicleghassen marouaniNo ratings yet
- Journal of Statistical Software: Presiduals: An R Package For Residual AnalysisDocument27 pagesJournal of Statistical Software: Presiduals: An R Package For Residual AnalysisRomualdoNo ratings yet
- Bio2 Module 5 - Logistic RegressionDocument19 pagesBio2 Module 5 - Logistic Regressiontamirat hailuNo ratings yet
- Validation of The Calibration Procedure in Atomic Absorption Spectrometric MethodsDocument10 pagesValidation of The Calibration Procedure in Atomic Absorption Spectrometric MethodsaureaborosNo ratings yet
- Hagle 1992Document24 pagesHagle 1992Jorge Alejandro Jirón-CevallosNo ratings yet
- Coefficient of Determination PDFDocument7 pagesCoefficient of Determination PDFRajesh KannaNo ratings yet
- Unit VDocument27 pagesUnit V05Bala SaatvikNo ratings yet
- Nayha Patel Thesis (UG Optometry)Document54 pagesNayha Patel Thesis (UG Optometry)Paul H Artes100% (1)
- Souza e Junqueira 2005 PDFDocument11 pagesSouza e Junqueira 2005 PDFEduardo CastroNo ratings yet
- Datalyzer Msa GR&RDocument17 pagesDatalyzer Msa GR&Rhazwan2283No ratings yet
- The Glejser Test and The Median Regression: Marilena FurnoDocument24 pagesThe Glejser Test and The Median Regression: Marilena Furnoangelo floresNo ratings yet
- Coefficient of DeterminationDocument7 pagesCoefficient of Determinationleekiangyen79No ratings yet
- " - Si, - P-Z: Convergence Criteria For Iterative ProcessesDocument2 pages" - Si, - P-Z: Convergence Criteria For Iterative ProcessesKtk ZadNo ratings yet
- Assignment of Quantitative Techniques: Questions For DiscussionDocument3 pagesAssignment of Quantitative Techniques: Questions For Discussionanon_727430771No ratings yet
- Measures of Fit For Logistic Regression: Paul D. Allison, Statistical Horizons LLC and The University of PennsylvaniaDocument12 pagesMeasures of Fit For Logistic Regression: Paul D. Allison, Statistical Horizons LLC and The University of Pennsylvaniajiregna eticha dakoNo ratings yet
- A Computationally Efficient Superresolution Image Reconstruction AlgorithmDocument11 pagesA Computationally Efficient Superresolution Image Reconstruction AlgorithmbinukirubaNo ratings yet
- Assessment of Bias With Emphasis On Method Comparison: Roger JohnsonDocument6 pagesAssessment of Bias With Emphasis On Method Comparison: Roger JohnsonRafat ElshemiNo ratings yet
- Bickel and Levina 2004Document28 pagesBickel and Levina 2004dfaini12No ratings yet
- Analytical Chemistry. - Curvas de Calibracion, Bondad de Ajuste, PonderaciónDocument8 pagesAnalytical Chemistry. - Curvas de Calibracion, Bondad de Ajuste, Ponderaciónhugoboss_darkNo ratings yet
- Modal Assurance CriterionDocument8 pagesModal Assurance CriterionAndres CaroNo ratings yet
- 14 Aos1260Document31 pages14 Aos1260Swapnaneel BhattacharyyaNo ratings yet
- CH 14Document12 pagesCH 14Piyush rajNo ratings yet
- Schmidt UCL Depos JCE2018Document16 pagesSchmidt UCL Depos JCE2018robertNo ratings yet
- Multivariate Linear QSPR/QSAR Models: Rigorous Evaluation of Variable Selection For PLSDocument10 pagesMultivariate Linear QSPR/QSAR Models: Rigorous Evaluation of Variable Selection For PLSTiruneh GANo ratings yet
- Mathematical Programming For Piecewise Linear Regression AnalysisDocument43 pagesMathematical Programming For Piecewise Linear Regression AnalysishongxinNo ratings yet
- Normal Distribution and Regression NotesDocument71 pagesNormal Distribution and Regression Notescassandraolson.kya07No ratings yet
- This Manuscript Is For Review Purposes Only.: Vke-Shava@sci - Utah.edu Kirby@sci - Utah.edu Akil@sci - Utah.eduDocument29 pagesThis Manuscript Is For Review Purposes Only.: Vke-Shava@sci - Utah.edu Kirby@sci - Utah.edu Akil@sci - Utah.edumohammad hosein benvidiNo ratings yet
- Comparison of Ordinary Linear Regression OrthogonaDocument17 pagesComparison of Ordinary Linear Regression OrthogonaBhagya MadhushaniNo ratings yet
- LLM ML Interview QDocument43 pagesLLM ML Interview QYagnesh VyasNo ratings yet
- Ordinary Least Squares: Linear ModelDocument13 pagesOrdinary Least Squares: Linear ModelNanang ArifinNo ratings yet
- Almeida2002 PDFDocument8 pagesAlmeida2002 PDFRifaldy HidayatNo ratings yet
- On The Rate of Convergence For The Pseudospectral Optimal Control of Feedback Linearizable SystemsDocument28 pagesOn The Rate of Convergence For The Pseudospectral Optimal Control of Feedback Linearizable SystemssssdaitNo ratings yet
- Evaluation of Regression Procedures For Methods Comparison StudiesDocument9 pagesEvaluation of Regression Procedures For Methods Comparison StudiesJustino WaveleNo ratings yet
- SPEE Recommended Evaluation Practice #6 - Definition of Decline Curve ParametersDocument7 pagesSPEE Recommended Evaluation Practice #6 - Definition of Decline Curve ParametersJorge Vásquez CarreñoNo ratings yet
- Sample Size for Analytical Surveys, Using a Pretest-Posttest-Comparison-Group DesignFrom EverandSample Size for Analytical Surveys, Using a Pretest-Posttest-Comparison-Group DesignNo ratings yet
- Optical Flow: Exploring Dynamic Visual Patterns in Computer VisionFrom EverandOptical Flow: Exploring Dynamic Visual Patterns in Computer VisionNo ratings yet
- EES Lecture 5Document25 pagesEES Lecture 5emrehan grsoy100% (1)
- A Gibbsian Approach To Potential Game TheoryDocument55 pagesA Gibbsian Approach To Potential Game TheoryACastishoNo ratings yet
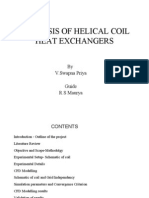
- Analysis of Helical Coil Heat Exchangers: by V.Swapna Priya Guide R S MauryaDocument23 pagesAnalysis of Helical Coil Heat Exchangers: by V.Swapna Priya Guide R S MauryaSwapna Priya VattemNo ratings yet
- Base Excited SystemsDocument72 pagesBase Excited Systemsjs kalyana ramaNo ratings yet
- Sound System EqualizationDocument17 pagesSound System EqualizationEspartaco ValdezNo ratings yet
- Wellbore Integrity and Cement Failure at HPHT Conditions PDFDocument13 pagesWellbore Integrity and Cement Failure at HPHT Conditions PDFRMolina65No ratings yet
- Wheel Therapy Chair: A Smart System For Disabled Person With Therapy FacilityDocument6 pagesWheel Therapy Chair: A Smart System For Disabled Person With Therapy FacilityRAJU VALLEPUNo ratings yet
- PreviousYearSolvedProblemsPhysics2016 Fiziks PDFDocument448 pagesPreviousYearSolvedProblemsPhysics2016 Fiziks PDFSushant Vijay100% (1)
- Atmel 46003 SE M90E32AS DatasheetDocument84 pagesAtmel 46003 SE M90E32AS DatasheetNagarajNo ratings yet
- Pitch Dynamics of Saturn-V Launch VehicleDocument39 pagesPitch Dynamics of Saturn-V Launch Vehiclemehtab barkatNo ratings yet
- Grammar Tenses Mix PracticeDocument10 pagesGrammar Tenses Mix PracticeAlfredo ValenzuelaNo ratings yet
- Material Balance On A 2 Unit DistillationsDocument6 pagesMaterial Balance On A 2 Unit Distillationsnhalieza1067No ratings yet
- Zinc Washer Coating ExperimentDocument7 pagesZinc Washer Coating Experimentherpaderp1101No ratings yet
- FourierDocument6 pagesFourierUpendra ReddyNo ratings yet
- Kober 13102011 PDFDocument27 pagesKober 13102011 PDFahmadNo ratings yet
- In Class Practice On Periodic Trends WsDocument3 pagesIn Class Practice On Periodic Trends WsFern HofileñaNo ratings yet
- Structural Dynamics - ESA 322 Lecture 3aDocument34 pagesStructural Dynamics - ESA 322 Lecture 3aPurawin SubramaniamNo ratings yet
- 9752787Document53 pages9752787Shiva KiranNo ratings yet
- Roller and CompactorsDocument23 pagesRoller and Compactorsmansoor azamNo ratings yet
- The Law of Physico-Chemical Change G. N. Lewis 1901Document22 pagesThe Law of Physico-Chemical Change G. N. Lewis 1901Victor VazquezNo ratings yet
- All Anna Univ SyllabusDocument1 pageAll Anna Univ SyllabusVkrthirumalai RamanathanNo ratings yet
- 68Document8 pages68gisella hapsariNo ratings yet
- Oiml R 47: Nternational EcommendationDocument12 pagesOiml R 47: Nternational EcommendationmikecolisNo ratings yet
- Geocentric Datum, GDM2000 For MalaysiaDocument15 pagesGeocentric Datum, GDM2000 For Malaysialegion1437100% (6)
- Pendulum and Dowsing Instruction - NotesDocument6 pagesPendulum and Dowsing Instruction - NotesShane Halaska67% (3)
- Collection of Pipe Related Simulation Tutorials PDFDocument313 pagesCollection of Pipe Related Simulation Tutorials PDFmithun5v5v5100% (2)
- 5b-Solids Liquids Gases-Density PressureDocument20 pages5b-Solids Liquids Gases-Density PressureBooksNo ratings yet























































































Download as pdf or txt
You might also like
- Tutorial XfoilDocument12 pagesTutorial XfoilArley MogollonNo ratings yet
- BPSK DFE Vs MLSE EqualisationDocument19 pagesBPSK DFE Vs MLSE EqualisationJaime FouchéNo ratings yet
- Capitulo 2Document41 pagesCapitulo 2Alan Orlando Sanchez MarzanNo ratings yet
- Minimum Distance EstimatorsDocument65 pagesMinimum Distance EstimatorssepwandjitanguepNo ratings yet
- Statistical Testing and Prediction Using Linear Regression: AbstractDocument10 pagesStatistical Testing and Prediction Using Linear Regression: AbstractDheeraj ChavanNo ratings yet
- University of Minnesota and Facultad de Ingenier Ia Qu Imica, UNL. Researcher of CONICETDocument21 pagesUniversity of Minnesota and Facultad de Ingenier Ia Qu Imica, UNL. Researcher of CONICETLiliana ForzaniNo ratings yet
- Chapter 6Document5 pagesChapter 6Nermine LimemeNo ratings yet
- International Statistical Institute (ISI)Document15 pagesInternational Statistical Institute (ISI)Guilherme MartheNo ratings yet
- Quantile Regression (Final) PDFDocument22 pagesQuantile Regression (Final) PDFbooianca100% (1)
- Performance Analysis of Regularized Linear Regression Models For Oxazolines and Oxazoles Derivatives Descriptor DatasetDocument13 pagesPerformance Analysis of Regularized Linear Regression Models For Oxazolines and Oxazoles Derivatives Descriptor DatasetAnonymous F1whTRNo ratings yet
- Comparison of Fatigue Data Using The Maximum Likelihood MethodDocument12 pagesComparison of Fatigue Data Using The Maximum Likelihood MethodtommasobrugoNo ratings yet
- Admin - JSDS, Oc 4. Journal Welly Fransiska-WAG-BedahDocument11 pagesAdmin - JSDS, Oc 4. Journal Welly Fransiska-WAG-BedahhanaNo ratings yet
- Chapter 6 Var Granger Causality TestsDocument27 pagesChapter 6 Var Granger Causality TestsTafirenyika SundeNo ratings yet
- Chapter 2 Simple Linear RegressionDocument60 pagesChapter 2 Simple Linear RegressionChriss TwhNo ratings yet
- Robust Estimation of Between and Within Laboratory Standard Deviation With Measurement Results Below The Detection LimitDocument7 pagesRobust Estimation of Between and Within Laboratory Standard Deviation With Measurement Results Below The Detection Limitds17am003No ratings yet
- Environmental Data Sets With Below Detection Limit ObservationsDocument27 pagesEnvironmental Data Sets With Below Detection Limit Observationsdante1419828327No ratings yet
- 2021 - Solving Multistage Stochastic Linear Programming Via Regularized Linear Decision Rules. An Application To Hydrothermal Dispatch PlanningDocument35 pages2021 - Solving Multistage Stochastic Linear Programming Via Regularized Linear Decision Rules. An Application To Hydrothermal Dispatch PlanningAlejandro AnguloNo ratings yet
- The Problem of Overfitting: PerspectiveDocument12 pagesThe Problem of Overfitting: PerspectiveManoj SharmaNo ratings yet
- Stopping Criteria For A Constrained Single-Objective Particle Swarm Optimization AlgorithmDocument10 pagesStopping Criteria For A Constrained Single-Objective Particle Swarm Optimization AlgorithmLittle PrincessNo ratings yet
- Aspects of Linear Stability Analysis For Higher-Order Finite-Difference MethodsDocument11 pagesAspects of Linear Stability Analysis For Higher-Order Finite-Difference MethodsKarthikPrakashNo ratings yet
- A Well-Conditioned Estimator For Large-Dimensional Covariance MatricesDocument47 pagesA Well-Conditioned Estimator For Large-Dimensional Covariance MatricesGgggggNo ratings yet
- Module 4: Regression Shrinkage MethodsDocument5 pagesModule 4: Regression Shrinkage Methods205Abhishek KotagiNo ratings yet
- Regression AnalysisDocument7 pagesRegression AnalysisshoaibNo ratings yet
- EDA 4th ModuleDocument26 pagesEDA 4th Module205Abhishek KotagiNo ratings yet
- Shrinkage Regression: Rolf Sundberg Volume 4, PP 1994-1998 inDocument5 pagesShrinkage Regression: Rolf Sundberg Volume 4, PP 1994-1998 inMiguel Angel Gonzalez VargasNo ratings yet
- Observer Design For LPV Systems With Uncertain Measurements On Scheduling Variables: Application To An Electric Ground VehicleDocument12 pagesObserver Design For LPV Systems With Uncertain Measurements On Scheduling Variables: Application To An Electric Ground Vehicleghassen marouaniNo ratings yet
- Journal of Statistical Software: Presiduals: An R Package For Residual AnalysisDocument27 pagesJournal of Statistical Software: Presiduals: An R Package For Residual AnalysisRomualdoNo ratings yet
- Bio2 Module 5 - Logistic RegressionDocument19 pagesBio2 Module 5 - Logistic Regressiontamirat hailuNo ratings yet
- Validation of The Calibration Procedure in Atomic Absorption Spectrometric MethodsDocument10 pagesValidation of The Calibration Procedure in Atomic Absorption Spectrometric MethodsaureaborosNo ratings yet
- Hagle 1992Document24 pagesHagle 1992Jorge Alejandro Jirón-CevallosNo ratings yet
- Coefficient of Determination PDFDocument7 pagesCoefficient of Determination PDFRajesh KannaNo ratings yet
- Unit VDocument27 pagesUnit V05Bala SaatvikNo ratings yet
- Nayha Patel Thesis (UG Optometry)Document54 pagesNayha Patel Thesis (UG Optometry)Paul H Artes100% (1)
- Souza e Junqueira 2005 PDFDocument11 pagesSouza e Junqueira 2005 PDFEduardo CastroNo ratings yet
- Datalyzer Msa GR&RDocument17 pagesDatalyzer Msa GR&Rhazwan2283No ratings yet
- The Glejser Test and The Median Regression: Marilena FurnoDocument24 pagesThe Glejser Test and The Median Regression: Marilena Furnoangelo floresNo ratings yet
- Coefficient of DeterminationDocument7 pagesCoefficient of Determinationleekiangyen79No ratings yet
- " - Si, - P-Z: Convergence Criteria For Iterative ProcessesDocument2 pages" - Si, - P-Z: Convergence Criteria For Iterative ProcessesKtk ZadNo ratings yet
- Assignment of Quantitative Techniques: Questions For DiscussionDocument3 pagesAssignment of Quantitative Techniques: Questions For Discussionanon_727430771No ratings yet
- Measures of Fit For Logistic Regression: Paul D. Allison, Statistical Horizons LLC and The University of PennsylvaniaDocument12 pagesMeasures of Fit For Logistic Regression: Paul D. Allison, Statistical Horizons LLC and The University of Pennsylvaniajiregna eticha dakoNo ratings yet
- A Computationally Efficient Superresolution Image Reconstruction AlgorithmDocument11 pagesA Computationally Efficient Superresolution Image Reconstruction AlgorithmbinukirubaNo ratings yet
- Assessment of Bias With Emphasis On Method Comparison: Roger JohnsonDocument6 pagesAssessment of Bias With Emphasis On Method Comparison: Roger JohnsonRafat ElshemiNo ratings yet
- Bickel and Levina 2004Document28 pagesBickel and Levina 2004dfaini12No ratings yet
- Analytical Chemistry. - Curvas de Calibracion, Bondad de Ajuste, PonderaciónDocument8 pagesAnalytical Chemistry. - Curvas de Calibracion, Bondad de Ajuste, Ponderaciónhugoboss_darkNo ratings yet
- Modal Assurance CriterionDocument8 pagesModal Assurance CriterionAndres CaroNo ratings yet
- 14 Aos1260Document31 pages14 Aos1260Swapnaneel BhattacharyyaNo ratings yet
- CH 14Document12 pagesCH 14Piyush rajNo ratings yet
- Schmidt UCL Depos JCE2018Document16 pagesSchmidt UCL Depos JCE2018robertNo ratings yet
- Multivariate Linear QSPR/QSAR Models: Rigorous Evaluation of Variable Selection For PLSDocument10 pagesMultivariate Linear QSPR/QSAR Models: Rigorous Evaluation of Variable Selection For PLSTiruneh GANo ratings yet
- Mathematical Programming For Piecewise Linear Regression AnalysisDocument43 pagesMathematical Programming For Piecewise Linear Regression AnalysishongxinNo ratings yet
- Normal Distribution and Regression NotesDocument71 pagesNormal Distribution and Regression Notescassandraolson.kya07No ratings yet
- This Manuscript Is For Review Purposes Only.: Vke-Shava@sci - Utah.edu Kirby@sci - Utah.edu Akil@sci - Utah.eduDocument29 pagesThis Manuscript Is For Review Purposes Only.: Vke-Shava@sci - Utah.edu Kirby@sci - Utah.edu Akil@sci - Utah.edumohammad hosein benvidiNo ratings yet
- Comparison of Ordinary Linear Regression OrthogonaDocument17 pagesComparison of Ordinary Linear Regression OrthogonaBhagya MadhushaniNo ratings yet
- LLM ML Interview QDocument43 pagesLLM ML Interview QYagnesh VyasNo ratings yet
- Ordinary Least Squares: Linear ModelDocument13 pagesOrdinary Least Squares: Linear ModelNanang ArifinNo ratings yet
- Almeida2002 PDFDocument8 pagesAlmeida2002 PDFRifaldy HidayatNo ratings yet
- On The Rate of Convergence For The Pseudospectral Optimal Control of Feedback Linearizable SystemsDocument28 pagesOn The Rate of Convergence For The Pseudospectral Optimal Control of Feedback Linearizable SystemssssdaitNo ratings yet
- Evaluation of Regression Procedures For Methods Comparison StudiesDocument9 pagesEvaluation of Regression Procedures For Methods Comparison StudiesJustino WaveleNo ratings yet
- SPEE Recommended Evaluation Practice #6 - Definition of Decline Curve ParametersDocument7 pagesSPEE Recommended Evaluation Practice #6 - Definition of Decline Curve ParametersJorge Vásquez CarreñoNo ratings yet
- Sample Size for Analytical Surveys, Using a Pretest-Posttest-Comparison-Group DesignFrom EverandSample Size for Analytical Surveys, Using a Pretest-Posttest-Comparison-Group DesignNo ratings yet
- Optical Flow: Exploring Dynamic Visual Patterns in Computer VisionFrom EverandOptical Flow: Exploring Dynamic Visual Patterns in Computer VisionNo ratings yet
- EES Lecture 5Document25 pagesEES Lecture 5emrehan grsoy100% (1)
- A Gibbsian Approach To Potential Game TheoryDocument55 pagesA Gibbsian Approach To Potential Game TheoryACastishoNo ratings yet
- Analysis of Helical Coil Heat Exchangers: by V.Swapna Priya Guide R S MauryaDocument23 pagesAnalysis of Helical Coil Heat Exchangers: by V.Swapna Priya Guide R S MauryaSwapna Priya VattemNo ratings yet
- Base Excited SystemsDocument72 pagesBase Excited Systemsjs kalyana ramaNo ratings yet
- Sound System EqualizationDocument17 pagesSound System EqualizationEspartaco ValdezNo ratings yet
- Wellbore Integrity and Cement Failure at HPHT Conditions PDFDocument13 pagesWellbore Integrity and Cement Failure at HPHT Conditions PDFRMolina65No ratings yet
- Wheel Therapy Chair: A Smart System For Disabled Person With Therapy FacilityDocument6 pagesWheel Therapy Chair: A Smart System For Disabled Person With Therapy FacilityRAJU VALLEPUNo ratings yet
- PreviousYearSolvedProblemsPhysics2016 Fiziks PDFDocument448 pagesPreviousYearSolvedProblemsPhysics2016 Fiziks PDFSushant Vijay100% (1)
- Atmel 46003 SE M90E32AS DatasheetDocument84 pagesAtmel 46003 SE M90E32AS DatasheetNagarajNo ratings yet
- Pitch Dynamics of Saturn-V Launch VehicleDocument39 pagesPitch Dynamics of Saturn-V Launch Vehiclemehtab barkatNo ratings yet
- Grammar Tenses Mix PracticeDocument10 pagesGrammar Tenses Mix PracticeAlfredo ValenzuelaNo ratings yet
- Material Balance On A 2 Unit DistillationsDocument6 pagesMaterial Balance On A 2 Unit Distillationsnhalieza1067No ratings yet
- Zinc Washer Coating ExperimentDocument7 pagesZinc Washer Coating Experimentherpaderp1101No ratings yet
- FourierDocument6 pagesFourierUpendra ReddyNo ratings yet
- Kober 13102011 PDFDocument27 pagesKober 13102011 PDFahmadNo ratings yet
- In Class Practice On Periodic Trends WsDocument3 pagesIn Class Practice On Periodic Trends WsFern HofileñaNo ratings yet
- Structural Dynamics - ESA 322 Lecture 3aDocument34 pagesStructural Dynamics - ESA 322 Lecture 3aPurawin SubramaniamNo ratings yet
- 9752787Document53 pages9752787Shiva KiranNo ratings yet
- Roller and CompactorsDocument23 pagesRoller and Compactorsmansoor azamNo ratings yet
- The Law of Physico-Chemical Change G. N. Lewis 1901Document22 pagesThe Law of Physico-Chemical Change G. N. Lewis 1901Victor VazquezNo ratings yet
- All Anna Univ SyllabusDocument1 pageAll Anna Univ SyllabusVkrthirumalai RamanathanNo ratings yet
- 68Document8 pages68gisella hapsariNo ratings yet
- Oiml R 47: Nternational EcommendationDocument12 pagesOiml R 47: Nternational EcommendationmikecolisNo ratings yet
- Geocentric Datum, GDM2000 For MalaysiaDocument15 pagesGeocentric Datum, GDM2000 For Malaysialegion1437100% (6)
- Pendulum and Dowsing Instruction - NotesDocument6 pagesPendulum and Dowsing Instruction - NotesShane Halaska67% (3)
- Collection of Pipe Related Simulation Tutorials PDFDocument313 pagesCollection of Pipe Related Simulation Tutorials PDFmithun5v5v5100% (2)
- 5b-Solids Liquids Gases-Density PressureDocument20 pages5b-Solids Liquids Gases-Density PressureBooksNo ratings yet