
Lab 7 Transducers
Lab 7 Transducers
You might also like
- Wca-16 Rolls Royce - 250 TV Bow & Stern Tunnel Thrusters PDFDocument115 pagesWca-16 Rolls Royce - 250 TV Bow & Stern Tunnel Thrusters PDFANo ratings yet
- Experiment1-Multimeter, Oscilloscope and Function GeneratorDocument11 pagesExperiment1-Multimeter, Oscilloscope and Function GeneratorHilmi SulimanNo ratings yet
- Lab 1 Full ReportDocument15 pagesLab 1 Full ReportYann YeuNo ratings yet
- BBS Book (PT 14) NeglyDocument7 pagesBBS Book (PT 14) Neglyapi-3871208No ratings yet
- Application of Optical SensorsDocument5 pagesApplication of Optical SensorsBhalchandra MurariNo ratings yet
- Lab 2: AC Measurements-Capacitors and Inductors: Prerequisite Reference MaterialsDocument10 pagesLab 2: AC Measurements-Capacitors and Inductors: Prerequisite Reference MaterialsLeandro ArvattiNo ratings yet
- ICS Lab ManualDocument28 pagesICS Lab Manualashok_abclNo ratings yet
- Instrumentation Lab ManualDocument14 pagesInstrumentation Lab ManualAmulyaNo ratings yet
- Lab - 2C - Additional User Manuals For OscilloscopeDocument19 pagesLab - 2C - Additional User Manuals For OscilloscoperobiulislammohorNo ratings yet
- The OscilloscopeDocument5 pagesThe OscilloscopeSadiq IdrisNo ratings yet
- Position Sensor: D KA CDocument8 pagesPosition Sensor: D KA CJamalkhanNo ratings yet
- Lab2 Small Signal DiodeDocument3 pagesLab2 Small Signal DiodePrincess Roxas CristobalNo ratings yet
- Signal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBDocument7 pagesSignal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBsakthisriniNo ratings yet
- Voltage Divider ExperimentDocument14 pagesVoltage Divider ExperimentDave Vic Solis100% (2)
- Experiment 1: Experiment 1: Introduction To Laboratory InstrumentsDocument4 pagesExperiment 1: Experiment 1: Introduction To Laboratory InstrumentsWaseem HaiderNo ratings yet
- International Islamic University, Islamabad: Faculty of Engineering and TechnologyDocument10 pagesInternational Islamic University, Islamabad: Faculty of Engineering and TechnologyLovely JuttNo ratings yet
- Transducer Manual NewDocument17 pagesTransducer Manual NewSARDAR PATELNo ratings yet
- Cable Fault DetectorDocument25 pagesCable Fault DetectorHarshalNo ratings yet
- Experiment 4 AC Measurents RC A RL Ckts 210330Document7 pagesExperiment 4 AC Measurents RC A RL Ckts 210330MK MillyNo ratings yet
- Simulation of Extra High Voltage Long Transmission LinesDocument18 pagesSimulation of Extra High Voltage Long Transmission LinesAaryarohit NaskarNo ratings yet
- Adi Design SolutionDocument7 pagesAdi Design SolutionMark John Servado AgsalogNo ratings yet
- Biomedical Instrumentation: Prof. Dr. Nizamettin AYDINDocument81 pagesBiomedical Instrumentation: Prof. Dr. Nizamettin AYDINAbraiz Khan KhattakNo ratings yet
- 11N407-Sensors and Transducers Lab ManualDocument74 pages11N407-Sensors and Transducers Lab ManualrameswariNo ratings yet
- Experiment 1 FamiliarizationDocument7 pagesExperiment 1 FamiliarizationSeif-El-Islam BayNo ratings yet
- Solenoid Lab ManualDocument17 pagesSolenoid Lab Manualbrandon999No ratings yet
- Introduction To Lab EquipmentDocument5 pagesIntroduction To Lab EquipmentKashif Mujeeb Abdul MujeebNo ratings yet
- Universal Current SensorDocument12 pagesUniversal Current SensorBhargav MushiniNo ratings yet
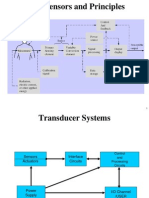
- Basic Sensors and PrinciplesDocument80 pagesBasic Sensors and Principlesmparanthaman2No ratings yet
- Types of Transducer and ApplicationDocument31 pagesTypes of Transducer and ApplicationcocojithuNo ratings yet
- IV Characteristic TransistorDocument7 pagesIV Characteristic TransistorNida RidzuanNo ratings yet
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocument31 pagesTypes of Transducers and Their Applications: Instrumentation and Product TestingFemi PrinceNo ratings yet
- Lab ReportDocument12 pagesLab ReportSarah HarunNo ratings yet
- Experiment 11Document8 pagesExperiment 11Mihai BogdanNo ratings yet
- Battery Management System (BMS) EE401 Final ReportDocument26 pagesBattery Management System (BMS) EE401 Final ReportOzgur M. DumanNo ratings yet
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocument31 pagesTypes of Transducers and Their Applications: Instrumentation and Product TestingvikasinmumbaiNo ratings yet
- Electric Circuits I: Laboratory Guide ForDocument67 pagesElectric Circuits I: Laboratory Guide ForMisa KurobaneNo ratings yet
- Introduction To The Oscilloscope: 10.1 1.1.1 ObjectivesDocument15 pagesIntroduction To The Oscilloscope: 10.1 1.1.1 Objectivesqwert 12345No ratings yet
- Topic 3 Oscilloscope and Signal GeneratorDocument24 pagesTopic 3 Oscilloscope and Signal GeneratorChinNo ratings yet
- Unit-3-Relaying - Static RelaysDocument62 pagesUnit-3-Relaying - Static Relayssubbu2051No ratings yet
- Labreport ThreeDocument8 pagesLabreport ThreeTeshome GirmaNo ratings yet
- Team Revolver: EP 391 MicroprocessorsDocument21 pagesTeam Revolver: EP 391 MicroprocessorsIan BryanNo ratings yet
- Displacement Sensors: 1. Resistance Based and Optical Incremental Sensors of Position TaskDocument7 pagesDisplacement Sensors: 1. Resistance Based and Optical Incremental Sensors of Position TaskBoobalan ThirugnanasambandamNo ratings yet
- Unit 5 Displacement, Velocity and Acceleration MeasurementDocument26 pagesUnit 5 Displacement, Velocity and Acceleration Measurementbhuyanuttam7No ratings yet
- Faculty ManualDocument60 pagesFaculty ManualCookiesNo ratings yet
- Efca 2 Lab 1vDocument8 pagesEfca 2 Lab 1vM Fa RizNo ratings yet
- Student ManualDocument61 pagesStudent ManualCookiesNo ratings yet
- Senzori Capacitive Pentru Deplasari LiniareDocument10 pagesSenzori Capacitive Pentru Deplasari LiniarePira PaulNo ratings yet
- Chap4 AcDcmeter New DiplomaDocument45 pagesChap4 AcDcmeter New DiplomaSepul SisiputNo ratings yet
- Project 2 ElectronicDocument23 pagesProject 2 ElectronicOmar Eduardo Rios GuzmanNo ratings yet
- PDF - Development of A Digital Phase Angle MeterDocument6 pagesPDF - Development of A Digital Phase Angle MeterZuriel MontielNo ratings yet
- Lab 9Document13 pagesLab 9Abu BakarNo ratings yet
- Measurement of Physical QuantitiesDocument16 pagesMeasurement of Physical QuantitiesRudra ChauhanNo ratings yet
- Interpretation of ResultsDocument3 pagesInterpretation of ResultsJulian CaminaNo ratings yet
- EE - 111 Basic Electronics: Experiment # 1Document8 pagesEE - 111 Basic Electronics: Experiment # 1khazima UmairNo ratings yet
- Lecture 4: Measuring Instruments and Power/Signal Sources: 1-Digital MultimeterDocument8 pagesLecture 4: Measuring Instruments and Power/Signal Sources: 1-Digital MultimeterHuzaifa RehanNo ratings yet
- 2dcmeter 120904024818 Phpapp01Document38 pages2dcmeter 120904024818 Phpapp01Imran AbdullahNo ratings yet
- Familiarization of Electronic Measuring InstrumentsDocument9 pagesFamiliarization of Electronic Measuring Instrumentschinnu0% (1)
- Electronic Workshop 2nd Experiment3Document9 pagesElectronic Workshop 2nd Experiment3chinnuNo ratings yet
- 12th Electronics Most Likely Questions SetDocument19 pages12th Electronics Most Likely Questions SetomdombareNo ratings yet
- Effective Multi-Tap TransformerDocument8 pagesEffective Multi-Tap Transformer15101980No ratings yet
- Factsheet CRC Sfa en-PDF 1Document1 pageFactsheet CRC Sfa en-PDF 127189No ratings yet
- Circle With Trig Ratios and AnglesDocument1 pageCircle With Trig Ratios and Angles27189No ratings yet
- Pain Mechanism Summary TableDocument1 pagePain Mechanism Summary Table27189No ratings yet
- Lab 1-Equipment Overview Final PDFDocument6 pagesLab 1-Equipment Overview Final PDF27189No ratings yet
- The Fibonacci Sequence ExplainedDocument8 pagesThe Fibonacci Sequence Explained27189No ratings yet
- 9 Exercise Physiology Handout 2011Document20 pages9 Exercise Physiology Handout 2011maraj687No ratings yet
- Kohima Nagaland LBDocument1 pageKohima Nagaland LBIndia TreadingNo ratings yet
- Tax System SriLankaDocument44 pagesTax System SriLankamandarak7146No ratings yet
- Veins and Hydrothermal DepositsDocument2 pagesVeins and Hydrothermal Depositsalimurtadha100% (1)
- 4.phases in Agricultural DevelopmentDocument16 pages4.phases in Agricultural Developmentakuril100% (3)
- Environmental Science For AP Second EditionDocument61 pagesEnvironmental Science For AP Second Editionjoshua.little480100% (50)
- 400PNR CDocument3 pages400PNR CmdisicNo ratings yet
- TinyMobileRobots TinySurveyor FlyerDocument4 pagesTinyMobileRobots TinySurveyor FlyerfelipeNo ratings yet
- Open-Circuit Time Constant Analysis: Asas As Hs K Bsbs BsDocument24 pagesOpen-Circuit Time Constant Analysis: Asas As Hs K Bsbs BsSHAIK MUSTHAFANo ratings yet
- Koch - Control ChartsDocument40 pagesKoch - Control ChartsAkash MarathakamNo ratings yet
- Quatre Agro Enterprise Private LimitedDocument25 pagesQuatre Agro Enterprise Private Limitedp23pallavNo ratings yet
- Ciclo Di Verniciatura: Proprieta' Tecniche Vedi Schede Tecniche AllegateDocument1 pageCiclo Di Verniciatura: Proprieta' Tecniche Vedi Schede Tecniche AllegateMaffone NumerounoNo ratings yet
- The Normal DistributionDocument30 pagesThe Normal DistributionJohn Rich CaidicNo ratings yet
- Wind EnergyDocument6 pagesWind EnergyRajat DubeyNo ratings yet
- Jayvee Dime,,,,project in Physics Light and SoundDocument25 pagesJayvee Dime,,,,project in Physics Light and SoundJayvee DimeNo ratings yet
- Asme A13.1 - 1996Document27 pagesAsme A13.1 - 1996lohv100% (1)
- Price List 2018Document20 pagesPrice List 2018Imml TasbiNo ratings yet
- Neisseria Gonorrhoeae and Neisseria MeningitidesDocument3 pagesNeisseria Gonorrhoeae and Neisseria MeningitidesAmador Gielas0% (1)
- (A) Design - Introduction To Transformer DesignDocument16 pages(A) Design - Introduction To Transformer DesignZineddine BENOUADAHNo ratings yet
- Cacio e Pepe Pizza by Chef Uditi: Makes 4-5 Pizzas, About 250 GR Each Ingredients: For The Pizza DoughDocument1 pageCacio e Pepe Pizza by Chef Uditi: Makes 4-5 Pizzas, About 250 GR Each Ingredients: For The Pizza DoughPablo NameNo ratings yet
- Uremic EncephalophatyDocument48 pagesUremic EncephalophatySindi LadayaNo ratings yet
- 8210.40 Single Band RET For Multiband Antennas (Controlling White Antenna Array)Document1 page8210.40 Single Band RET For Multiband Antennas (Controlling White Antenna Array)Mohammad AlloushNo ratings yet
- Jewellery Shop Design 3dDocument5 pagesJewellery Shop Design 3dTrường Thọ NguyễnNo ratings yet
- Technical Data: Digital Color Progressive Scan Camera DÜRR TXG06c-K22 - Gigabit EthernetDocument20 pagesTechnical Data: Digital Color Progressive Scan Camera DÜRR TXG06c-K22 - Gigabit EthernetDiogo FiaesNo ratings yet
- Schiavi Enc Met Page015Document1 pageSchiavi Enc Met Page015Adel AdelNo ratings yet
- A. Title of Experiment B. Date and Time of Experiment: Wednesday, 10Document15 pagesA. Title of Experiment B. Date and Time of Experiment: Wednesday, 10LichaNo ratings yet
- T2T 32T BTC Master Manual enDocument10 pagesT2T 32T BTC Master Manual enRAMON RUIZNo ratings yet
- An Extended Force Density MethodDocument14 pagesAn Extended Force Density MethodSamuellgerard SamuellgerardNo ratings yet



























































































Download as pdf or txt
You might also like
- Wca-16 Rolls Royce - 250 TV Bow & Stern Tunnel Thrusters PDFDocument115 pagesWca-16 Rolls Royce - 250 TV Bow & Stern Tunnel Thrusters PDFANo ratings yet
- Experiment1-Multimeter, Oscilloscope and Function GeneratorDocument11 pagesExperiment1-Multimeter, Oscilloscope and Function GeneratorHilmi SulimanNo ratings yet
- Lab 1 Full ReportDocument15 pagesLab 1 Full ReportYann YeuNo ratings yet
- BBS Book (PT 14) NeglyDocument7 pagesBBS Book (PT 14) Neglyapi-3871208No ratings yet
- Application of Optical SensorsDocument5 pagesApplication of Optical SensorsBhalchandra MurariNo ratings yet
- Lab 2: AC Measurements-Capacitors and Inductors: Prerequisite Reference MaterialsDocument10 pagesLab 2: AC Measurements-Capacitors and Inductors: Prerequisite Reference MaterialsLeandro ArvattiNo ratings yet
- ICS Lab ManualDocument28 pagesICS Lab Manualashok_abclNo ratings yet
- Instrumentation Lab ManualDocument14 pagesInstrumentation Lab ManualAmulyaNo ratings yet
- Lab - 2C - Additional User Manuals For OscilloscopeDocument19 pagesLab - 2C - Additional User Manuals For OscilloscoperobiulislammohorNo ratings yet
- The OscilloscopeDocument5 pagesThe OscilloscopeSadiq IdrisNo ratings yet
- Position Sensor: D KA CDocument8 pagesPosition Sensor: D KA CJamalkhanNo ratings yet
- Lab2 Small Signal DiodeDocument3 pagesLab2 Small Signal DiodePrincess Roxas CristobalNo ratings yet
- Signal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBDocument7 pagesSignal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBsakthisriniNo ratings yet
- Voltage Divider ExperimentDocument14 pagesVoltage Divider ExperimentDave Vic Solis100% (2)
- Experiment 1: Experiment 1: Introduction To Laboratory InstrumentsDocument4 pagesExperiment 1: Experiment 1: Introduction To Laboratory InstrumentsWaseem HaiderNo ratings yet
- International Islamic University, Islamabad: Faculty of Engineering and TechnologyDocument10 pagesInternational Islamic University, Islamabad: Faculty of Engineering and TechnologyLovely JuttNo ratings yet
- Transducer Manual NewDocument17 pagesTransducer Manual NewSARDAR PATELNo ratings yet
- Cable Fault DetectorDocument25 pagesCable Fault DetectorHarshalNo ratings yet
- Experiment 4 AC Measurents RC A RL Ckts 210330Document7 pagesExperiment 4 AC Measurents RC A RL Ckts 210330MK MillyNo ratings yet
- Simulation of Extra High Voltage Long Transmission LinesDocument18 pagesSimulation of Extra High Voltage Long Transmission LinesAaryarohit NaskarNo ratings yet
- Adi Design SolutionDocument7 pagesAdi Design SolutionMark John Servado AgsalogNo ratings yet
- Biomedical Instrumentation: Prof. Dr. Nizamettin AYDINDocument81 pagesBiomedical Instrumentation: Prof. Dr. Nizamettin AYDINAbraiz Khan KhattakNo ratings yet
- 11N407-Sensors and Transducers Lab ManualDocument74 pages11N407-Sensors and Transducers Lab ManualrameswariNo ratings yet
- Experiment 1 FamiliarizationDocument7 pagesExperiment 1 FamiliarizationSeif-El-Islam BayNo ratings yet
- Solenoid Lab ManualDocument17 pagesSolenoid Lab Manualbrandon999No ratings yet
- Introduction To Lab EquipmentDocument5 pagesIntroduction To Lab EquipmentKashif Mujeeb Abdul MujeebNo ratings yet
- Universal Current SensorDocument12 pagesUniversal Current SensorBhargav MushiniNo ratings yet
- Basic Sensors and PrinciplesDocument80 pagesBasic Sensors and Principlesmparanthaman2No ratings yet
- Types of Transducer and ApplicationDocument31 pagesTypes of Transducer and ApplicationcocojithuNo ratings yet
- IV Characteristic TransistorDocument7 pagesIV Characteristic TransistorNida RidzuanNo ratings yet
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocument31 pagesTypes of Transducers and Their Applications: Instrumentation and Product TestingFemi PrinceNo ratings yet
- Lab ReportDocument12 pagesLab ReportSarah HarunNo ratings yet
- Experiment 11Document8 pagesExperiment 11Mihai BogdanNo ratings yet
- Battery Management System (BMS) EE401 Final ReportDocument26 pagesBattery Management System (BMS) EE401 Final ReportOzgur M. DumanNo ratings yet
- Types of Transducers and Their Applications: Instrumentation and Product TestingDocument31 pagesTypes of Transducers and Their Applications: Instrumentation and Product TestingvikasinmumbaiNo ratings yet
- Electric Circuits I: Laboratory Guide ForDocument67 pagesElectric Circuits I: Laboratory Guide ForMisa KurobaneNo ratings yet
- Introduction To The Oscilloscope: 10.1 1.1.1 ObjectivesDocument15 pagesIntroduction To The Oscilloscope: 10.1 1.1.1 Objectivesqwert 12345No ratings yet
- Topic 3 Oscilloscope and Signal GeneratorDocument24 pagesTopic 3 Oscilloscope and Signal GeneratorChinNo ratings yet
- Unit-3-Relaying - Static RelaysDocument62 pagesUnit-3-Relaying - Static Relayssubbu2051No ratings yet
- Labreport ThreeDocument8 pagesLabreport ThreeTeshome GirmaNo ratings yet
- Team Revolver: EP 391 MicroprocessorsDocument21 pagesTeam Revolver: EP 391 MicroprocessorsIan BryanNo ratings yet
- Displacement Sensors: 1. Resistance Based and Optical Incremental Sensors of Position TaskDocument7 pagesDisplacement Sensors: 1. Resistance Based and Optical Incremental Sensors of Position TaskBoobalan ThirugnanasambandamNo ratings yet
- Unit 5 Displacement, Velocity and Acceleration MeasurementDocument26 pagesUnit 5 Displacement, Velocity and Acceleration Measurementbhuyanuttam7No ratings yet
- Faculty ManualDocument60 pagesFaculty ManualCookiesNo ratings yet
- Efca 2 Lab 1vDocument8 pagesEfca 2 Lab 1vM Fa RizNo ratings yet
- Student ManualDocument61 pagesStudent ManualCookiesNo ratings yet
- Senzori Capacitive Pentru Deplasari LiniareDocument10 pagesSenzori Capacitive Pentru Deplasari LiniarePira PaulNo ratings yet
- Chap4 AcDcmeter New DiplomaDocument45 pagesChap4 AcDcmeter New DiplomaSepul SisiputNo ratings yet
- Project 2 ElectronicDocument23 pagesProject 2 ElectronicOmar Eduardo Rios GuzmanNo ratings yet
- PDF - Development of A Digital Phase Angle MeterDocument6 pagesPDF - Development of A Digital Phase Angle MeterZuriel MontielNo ratings yet
- Lab 9Document13 pagesLab 9Abu BakarNo ratings yet
- Measurement of Physical QuantitiesDocument16 pagesMeasurement of Physical QuantitiesRudra ChauhanNo ratings yet
- Interpretation of ResultsDocument3 pagesInterpretation of ResultsJulian CaminaNo ratings yet
- EE - 111 Basic Electronics: Experiment # 1Document8 pagesEE - 111 Basic Electronics: Experiment # 1khazima UmairNo ratings yet
- Lecture 4: Measuring Instruments and Power/Signal Sources: 1-Digital MultimeterDocument8 pagesLecture 4: Measuring Instruments and Power/Signal Sources: 1-Digital MultimeterHuzaifa RehanNo ratings yet
- 2dcmeter 120904024818 Phpapp01Document38 pages2dcmeter 120904024818 Phpapp01Imran AbdullahNo ratings yet
- Familiarization of Electronic Measuring InstrumentsDocument9 pagesFamiliarization of Electronic Measuring Instrumentschinnu0% (1)
- Electronic Workshop 2nd Experiment3Document9 pagesElectronic Workshop 2nd Experiment3chinnuNo ratings yet
- 12th Electronics Most Likely Questions SetDocument19 pages12th Electronics Most Likely Questions SetomdombareNo ratings yet
- Effective Multi-Tap TransformerDocument8 pagesEffective Multi-Tap Transformer15101980No ratings yet
- Factsheet CRC Sfa en-PDF 1Document1 pageFactsheet CRC Sfa en-PDF 127189No ratings yet
- Circle With Trig Ratios and AnglesDocument1 pageCircle With Trig Ratios and Angles27189No ratings yet
- Pain Mechanism Summary TableDocument1 pagePain Mechanism Summary Table27189No ratings yet
- Lab 1-Equipment Overview Final PDFDocument6 pagesLab 1-Equipment Overview Final PDF27189No ratings yet
- The Fibonacci Sequence ExplainedDocument8 pagesThe Fibonacci Sequence Explained27189No ratings yet
- 9 Exercise Physiology Handout 2011Document20 pages9 Exercise Physiology Handout 2011maraj687No ratings yet
- Kohima Nagaland LBDocument1 pageKohima Nagaland LBIndia TreadingNo ratings yet
- Tax System SriLankaDocument44 pagesTax System SriLankamandarak7146No ratings yet
- Veins and Hydrothermal DepositsDocument2 pagesVeins and Hydrothermal Depositsalimurtadha100% (1)
- 4.phases in Agricultural DevelopmentDocument16 pages4.phases in Agricultural Developmentakuril100% (3)
- Environmental Science For AP Second EditionDocument61 pagesEnvironmental Science For AP Second Editionjoshua.little480100% (50)
- 400PNR CDocument3 pages400PNR CmdisicNo ratings yet
- TinyMobileRobots TinySurveyor FlyerDocument4 pagesTinyMobileRobots TinySurveyor FlyerfelipeNo ratings yet
- Open-Circuit Time Constant Analysis: Asas As Hs K Bsbs BsDocument24 pagesOpen-Circuit Time Constant Analysis: Asas As Hs K Bsbs BsSHAIK MUSTHAFANo ratings yet
- Koch - Control ChartsDocument40 pagesKoch - Control ChartsAkash MarathakamNo ratings yet
- Quatre Agro Enterprise Private LimitedDocument25 pagesQuatre Agro Enterprise Private Limitedp23pallavNo ratings yet
- Ciclo Di Verniciatura: Proprieta' Tecniche Vedi Schede Tecniche AllegateDocument1 pageCiclo Di Verniciatura: Proprieta' Tecniche Vedi Schede Tecniche AllegateMaffone NumerounoNo ratings yet
- The Normal DistributionDocument30 pagesThe Normal DistributionJohn Rich CaidicNo ratings yet
- Wind EnergyDocument6 pagesWind EnergyRajat DubeyNo ratings yet
- Jayvee Dime,,,,project in Physics Light and SoundDocument25 pagesJayvee Dime,,,,project in Physics Light and SoundJayvee DimeNo ratings yet
- Asme A13.1 - 1996Document27 pagesAsme A13.1 - 1996lohv100% (1)
- Price List 2018Document20 pagesPrice List 2018Imml TasbiNo ratings yet
- Neisseria Gonorrhoeae and Neisseria MeningitidesDocument3 pagesNeisseria Gonorrhoeae and Neisseria MeningitidesAmador Gielas0% (1)
- (A) Design - Introduction To Transformer DesignDocument16 pages(A) Design - Introduction To Transformer DesignZineddine BENOUADAHNo ratings yet
- Cacio e Pepe Pizza by Chef Uditi: Makes 4-5 Pizzas, About 250 GR Each Ingredients: For The Pizza DoughDocument1 pageCacio e Pepe Pizza by Chef Uditi: Makes 4-5 Pizzas, About 250 GR Each Ingredients: For The Pizza DoughPablo NameNo ratings yet
- Uremic EncephalophatyDocument48 pagesUremic EncephalophatySindi LadayaNo ratings yet
- 8210.40 Single Band RET For Multiband Antennas (Controlling White Antenna Array)Document1 page8210.40 Single Band RET For Multiband Antennas (Controlling White Antenna Array)Mohammad AlloushNo ratings yet
- Jewellery Shop Design 3dDocument5 pagesJewellery Shop Design 3dTrường Thọ NguyễnNo ratings yet
- Technical Data: Digital Color Progressive Scan Camera DÜRR TXG06c-K22 - Gigabit EthernetDocument20 pagesTechnical Data: Digital Color Progressive Scan Camera DÜRR TXG06c-K22 - Gigabit EthernetDiogo FiaesNo ratings yet
- Schiavi Enc Met Page015Document1 pageSchiavi Enc Met Page015Adel AdelNo ratings yet
- A. Title of Experiment B. Date and Time of Experiment: Wednesday, 10Document15 pagesA. Title of Experiment B. Date and Time of Experiment: Wednesday, 10LichaNo ratings yet
- T2T 32T BTC Master Manual enDocument10 pagesT2T 32T BTC Master Manual enRAMON RUIZNo ratings yet
- An Extended Force Density MethodDocument14 pagesAn Extended Force Density MethodSamuellgerard SamuellgerardNo ratings yet