Download as pdf or txt
You might also like
- Question 1 - Expository EssayDocument3 pagesQuestion 1 - Expository EssayMahinNo ratings yet
- Advanced Temperature Measurement and Control, Second EditionFrom EverandAdvanced Temperature Measurement and Control, Second EditionNo ratings yet
- Boiler Control Systems Engineering, Second EditionFrom EverandBoiler Control Systems Engineering, Second EditionRating: 4.5 out of 5 stars4.5/5 (15)
- Refinements of The Ziegler Nichols Tuning Formula C.C PDFDocument8 pagesRefinements of The Ziegler Nichols Tuning Formula C.C PDFdautroc13No ratings yet
- EE4CL4 Lecture14 PDFDocument20 pagesEE4CL4 Lecture14 PDFramjiNo ratings yet
- Classical PID ControllerDocument62 pagesClassical PID ControllerAslama IsnaeniNo ratings yet
- Unit 4 - S1 2 3Document36 pagesUnit 4 - S1 2 3au3877No ratings yet
- Chapter 10 PID ControlsDocument35 pagesChapter 10 PID ControlsRiski SepTiadi RasyaNo ratings yet
- Ziegler-Nichols Tuning Rules For PIDDocument3 pagesZiegler-Nichols Tuning Rules For PIDMelroy D'SouzaNo ratings yet
- University of Basrah For Gas and Oil College of Oil and Gas Engineering Department of Chemical and Petroleum Refining EngineeringDocument13 pagesUniversity of Basrah For Gas and Oil College of Oil and Gas Engineering Department of Chemical and Petroleum Refining Engineeringsajad jasmNo ratings yet
- Empirical Tuning Rules According To Ziegler and NicholsDocument3 pagesEmpirical Tuning Rules According To Ziegler and NicholskalajamunNo ratings yet
- Elec Eng 4Cl4:: Control System DesignDocument12 pagesElec Eng 4Cl4:: Control System DesignMorteza SepehranNo ratings yet
- Design of PID Controller For First Order and Second Order SystemsDocument8 pagesDesign of PID Controller For First Order and Second Order SystemsAliaa TarekNo ratings yet
- Lab Experiment # 10: Demonstration of Ziegler-Nichols Method For Tuning of PID Controller in Matlab ObjectiveDocument10 pagesLab Experiment # 10: Demonstration of Ziegler-Nichols Method For Tuning of PID Controller in Matlab ObjectiveAsad saeedNo ratings yet
- PI ControllerDocument4 pagesPI ControllerDivyesh HarwaniNo ratings yet
- CHR MethodDocument9 pagesCHR Methodsanyo0612No ratings yet
- Lab Experiment # 06: ObjectiveDocument2 pagesLab Experiment # 06: ObjectiveMuhammad Samee baigNo ratings yet
- Partially Supported by Funda C Ao para A Ci Encia e A Tec-Nologia, Grant SFRH/BPD/20636/2004, Funded by POCI 2010, POS C, FSE and MCTESDocument6 pagesPartially Supported by Funda C Ao para A Ci Encia e A Tec-Nologia, Grant SFRH/BPD/20636/2004, Funded by POCI 2010, POS C, FSE and MCTESVigneshRamakrishnanNo ratings yet
- EE4CL4 Lecture31 PDFDocument16 pagesEE4CL4 Lecture31 PDFMorteza SepehranNo ratings yet
- The Good Gain Method For Simple Experimental TuninDocument12 pagesThe Good Gain Method For Simple Experimental TuninANVESH DONTULANo ratings yet
- Matlab Exp 7Document9 pagesMatlab Exp 7Mohd RehanNo ratings yet
- (Jantzen J.) Tuning of Fuzzy PID ControllersDocument22 pages(Jantzen J.) Tuning of Fuzzy PID ControllersGoegoes Dwi NNo ratings yet
- Ziegler-Nichols Closed-Loop Tuning Method - Control Notes PDFDocument5 pagesZiegler-Nichols Closed-Loop Tuning Method - Control Notes PDFDraganNo ratings yet
- Lecture2 3Document25 pagesLecture2 3vrushalibhattNo ratings yet
- Tuning of Pid Controller With Fuzzy LogicDocument17 pagesTuning of Pid Controller With Fuzzy LogicJurgen CokuNo ratings yet
- Experiment 1 Ziegler Nichols Tuning: 1 ObjectiveDocument6 pagesExperiment 1 Ziegler Nichols Tuning: 1 ObjectiveHEMANT KUMARNo ratings yet
- ZN Closed Loop MethodDocument7 pagesZN Closed Loop MethodJitesh EmmanuelNo ratings yet
- L-13 (SS) (Ia&c) ( (Ee) Nptel)Document8 pagesL-13 (SS) (Ia&c) ( (Ee) Nptel)Darkmatter DarkmatterrNo ratings yet
- Control Manual Lab 8Document12 pagesControl Manual Lab 8Hussain HadiNo ratings yet
- Digital PID Controllers: Different Forms of PIDDocument11 pagesDigital PID Controllers: Different Forms of PIDสหายดิว ลูกพระอาทิตย์No ratings yet
- 10 1 1 148 5914 PDFDocument4 pages10 1 1 148 5914 PDFlojain centerNo ratings yet
- Ziegler-Nichols Rules For Tuning PID ControllersDocument5 pagesZiegler-Nichols Rules For Tuning PID Controllersزهراء عادل عبد الزهرة إسماعيلNo ratings yet
- Auto-Tuning of PID Controllers Via Extremum SeekingDocument6 pagesAuto-Tuning of PID Controllers Via Extremum SeekingjuliiojaiimesNo ratings yet
- Fuzzy Based Controller For Heavy Duty Gas Turbine PlantDocument5 pagesFuzzy Based Controller For Heavy Duty Gas Turbine PlantRichard CleeNo ratings yet
- Implementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesDocument8 pagesImplementation of Matlab-SIMULINK Based Real Time Temperature Control For Set Point ChangesIngole DeepakNo ratings yet
- Control System Design Based On Frequency Response Analysis: Closed-Loop BehaviorDocument53 pagesControl System Design Based On Frequency Response Analysis: Closed-Loop Behaviorsatya sagarNo ratings yet
- Priprema Za Ispit 2Document8 pagesPriprema Za Ispit 2Aleksandar MicicNo ratings yet
- Visioli2005 PDFDocument13 pagesVisioli2005 PDFShyam SundarNo ratings yet
- Workshop#10 Report - Cascade Control of Jacketed Reactor - Roy - StewartDocument14 pagesWorkshop#10 Report - Cascade Control of Jacketed Reactor - Roy - Stewartdevbones18No ratings yet
- Magnetic LevitationDocument19 pagesMagnetic LevitationJayDon100% (1)
- Optimal Tuning PidDocument10 pagesOptimal Tuning PidfraicheNo ratings yet
- Lecture 11 (42-57)Document16 pagesLecture 11 (42-57)Saif AlabdullahNo ratings yet
- 19bic040 PC Exp-5Document8 pages19bic040 PC Exp-5Drumil PatelNo ratings yet
- Processcontrol Topic13 PidtuningDocument15 pagesProcesscontrol Topic13 Pidtuningmuthukumartharani100% (1)
- Pid Controller Using Ziegler Nichols MethodDocument7 pagesPid Controller Using Ziegler Nichols MethodMuhammad RedhaNo ratings yet
- 3.0 Literature Review 3.1 P ControllerDocument12 pages3.0 Literature Review 3.1 P ControllerMalek Marry AnneNo ratings yet
- Zomorrodi Shahrokhi PID Tunning Comparison PDFDocument12 pagesZomorrodi Shahrokhi PID Tunning Comparison PDFpatil_555No ratings yet
- Lecture09 - 5. Feedback Control Systems-2. Ziegler-Nichols Rules For Tuning PID ControllersDocument5 pagesLecture09 - 5. Feedback Control Systems-2. Ziegler-Nichols Rules For Tuning PID ControllersjonNo ratings yet
- Centralized PID Control by Decoupling of A Boiler-Turbine UnitDocument6 pagesCentralized PID Control by Decoupling of A Boiler-Turbine Unitrehan_sadiq1991No ratings yet
- Ziegler Nichol'sDocument9 pagesZiegler Nichol'sLuis Daniel De La GarzaNo ratings yet
- Process Control and DynamicsDocument14 pagesProcess Control and DynamicsVaibhav JaiswalNo ratings yet
- Elec4632 Lab 5 Notes 2023 t3Document9 pagesElec4632 Lab 5 Notes 2023 t3hiyomurrrNo ratings yet
- PID ControllerDocument13 pagesPID Controllerdar20092010No ratings yet
- Simple Electronics with GPIO Zero: Take Control of the Real World With your Raspberry PiFrom EverandSimple Electronics with GPIO Zero: Take Control of the Real World With your Raspberry PiRating: 5 out of 5 stars5/5 (1)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Economic and Financial Modelling with EViews: A Guide for Students and ProfessionalsFrom EverandEconomic and Financial Modelling with EViews: A Guide for Students and ProfessionalsNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Advanced Techniques and Technology of Computer-Aided Feedback ControlFrom EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNo ratings yet
- B.tech. (Computer Science)Document68 pagesB.tech. (Computer Science)रजतयदुवंशी0% (1)
- Presents GATE Answer Key 2014 For ECDocument24 pagesPresents GATE Answer Key 2014 For ECरजतयदुवंशीNo ratings yet
- Types of CrystallizersDocument9 pagesTypes of CrystallizersरजतयदुवंशीNo ratings yet
- Gate RefDocument3 pagesGate RefरजतयदुवंशीNo ratings yet
- Exploratory Development Strategies and Tactics in The Selection of Drug ForDocument41 pagesExploratory Development Strategies and Tactics in The Selection of Drug ForरजतयदुवंशीNo ratings yet
- The Grove Wastewater Reuse Fact SheetDocument5 pagesThe Grove Wastewater Reuse Fact SheetरजतयदुवंशीNo ratings yet
- Humidification Operations: Fundamentals and ApplicationsDocument40 pagesHumidification Operations: Fundamentals and ApplicationsरजतयदुवंशीNo ratings yet
- Statically Indeterminate Shaft-Bearing Systems: D Cos DDocument14 pagesStatically Indeterminate Shaft-Bearing Systems: D Cos DIvelin ValchevNo ratings yet
- Bimetal Dial ThermometerDocument2 pagesBimetal Dial ThermometerAnonymous edvYngNo ratings yet
- Using The Word Mapping Strategy in English Vocabulary DevelopmentDocument23 pagesUsing The Word Mapping Strategy in English Vocabulary DevelopmentJennilyn Estacio ZarateNo ratings yet
- Activity Based Costing-A Tool To Aid Decision MakingDocument54 pagesActivity Based Costing-A Tool To Aid Decision MakingSederiku KabaruzaNo ratings yet
- Important Reminders: Step 1Document4 pagesImportant Reminders: Step 1Hannah LagumbayNo ratings yet
- I Pledge Flyer - Ghana@60 CelebrationDocument22 pagesI Pledge Flyer - Ghana@60 CelebrationGhanaWeb100% (1)
- CatapultDocument4 pagesCatapultapi-305320178No ratings yet
- Lucchini Poly MilanoDocument26 pagesLucchini Poly MilanoAghajaniNo ratings yet
- Derivative of Logarithmic and Exponential FunctionDocument3 pagesDerivative of Logarithmic and Exponential FunctionPrincessdy CocadizNo ratings yet
- Adapt Pt7 Manual Vol IIIDocument235 pagesAdapt Pt7 Manual Vol IIIapi-3730088100% (2)
- RELATIONSHIP BETWEEN INFLATION AND CONSUMER SPENDING (Final Assessment Report)Document12 pagesRELATIONSHIP BETWEEN INFLATION AND CONSUMER SPENDING (Final Assessment Report)Najaa SofiaNo ratings yet
- Protection Coordination Rev03 by STL Power SolutionDocument168 pagesProtection Coordination Rev03 by STL Power Solutionalf sunflower100% (1)
- Exploring Project Complexities and Their Problems A Critical Review of The Literature 01Document13 pagesExploring Project Complexities and Their Problems A Critical Review of The Literature 01ehsankhaliliNo ratings yet
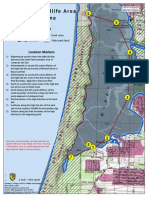
- Morro Bay Wildlife Area Hunt Zone: Map LegendDocument1 pageMorro Bay Wildlife Area Hunt Zone: Map LegendZarahNo ratings yet
- Test of WritingDocument22 pagesTest of WritingKhotim MaslikahNo ratings yet
- Updated Standard Vendor Application Form - 202112Document2 pagesUpdated Standard Vendor Application Form - 202112kamenriders637No ratings yet
- Week 3Document2 pagesWeek 3Jasmine Morante AntonioNo ratings yet
- Eksistensi Prinsip Pencemar Membayar Dalam Sistem Penegakan Hukum AgrariaDocument21 pagesEksistensi Prinsip Pencemar Membayar Dalam Sistem Penegakan Hukum AgrariaDhisia VininsaNo ratings yet
- Benchtop Universal Testing MachineDocument8 pagesBenchtop Universal Testing Machineharan2000No ratings yet
- Gamification and Evaluation of The Use The Agile Tests in Software Quality Subjects: The Application of Case StudiesDocument8 pagesGamification and Evaluation of The Use The Agile Tests in Software Quality Subjects: The Application of Case StudiesAndré AndradeNo ratings yet
- Engineering Clean Air: The Continuous Improvement of Diesel Engine Emission PerformanceDocument15 pagesEngineering Clean Air: The Continuous Improvement of Diesel Engine Emission PerformanceFajar RumantoNo ratings yet
- DT - NU-EEE342-Lecture 4-Smith Charts 2017 PDFDocument62 pagesDT - NU-EEE342-Lecture 4-Smith Charts 2017 PDFSabit ShaihollaNo ratings yet
- Addressing Sexual Harassment at Workplace - Without Author's NameDocument15 pagesAddressing Sexual Harassment at Workplace - Without Author's Namemehjabin ferdous moneesaNo ratings yet
- Kuliah 2 - PA IV - Pengantar Perancangan Bangunan PendidikanDocument20 pagesKuliah 2 - PA IV - Pengantar Perancangan Bangunan PendidikanHusnul MarfuahNo ratings yet
- Mediterranean Journal of Social Sciences: MCSER Publishing, Rome-ItalyDocument8 pagesMediterranean Journal of Social Sciences: MCSER Publishing, Rome-ItalyRisqiNo ratings yet
- Lignocellulosic Biorefinery: Integrated-Bioethanol and Chemicals Production in Pilot Plant Bioethanol G2Document1 pageLignocellulosic Biorefinery: Integrated-Bioethanol and Chemicals Production in Pilot Plant Bioethanol G2Moery MrtNo ratings yet
- Basic Service Purchase Order Process - DIEN MaterialDocument6 pagesBasic Service Purchase Order Process - DIEN MaterialDanielleNo ratings yet
- Receptionists Competency Standard Booklet Printed PDFDocument19 pagesReceptionists Competency Standard Booklet Printed PDFMicula OanaNo ratings yet
- Hygienic Process ConnectionsDocument22 pagesHygienic Process Connectionsabcdario666No ratings yet