Download as pdf or txt
You might also like
- Vacuum Pump Removal - Installation (Skyactiv-D 2.2)Document3 pagesVacuum Pump Removal - Installation (Skyactiv-D 2.2)toywrc100% (2)
- 2008CoxPaper - The Benefits of Online DGA Tap Changer MonitoringDocument6 pages2008CoxPaper - The Benefits of Online DGA Tap Changer Monitoringlbk50No ratings yet
- Ion 5kW BTMS Proposal: V1.0Document10 pagesIon 5kW BTMS Proposal: V1.0FWEFWEFWNo ratings yet
- PX5202 - SSDC Question BankDocument21 pagesPX5202 - SSDC Question BankRoja50% (2)
- Installation ManualDocument72 pagesInstallation ManualJohn PonceNo ratings yet
- ANSI NEMA AB 3-2013-MCCB y Su Aplicacion PDFDocument58 pagesANSI NEMA AB 3-2013-MCCB y Su Aplicacion PDFJuvencio MolinaNo ratings yet
- DC To DC Converters: Version 2 EE IIT, Kharagpur 1Document10 pagesDC To DC Converters: Version 2 EE IIT, Kharagpur 1Deepak Kumar RajakNo ratings yet
- Power Line Carrier Detailed DocumentDocument51 pagesPower Line Carrier Detailed DocumentmuzammiliqbalNo ratings yet
- Eaton Transformadores de Dist.Document15 pagesEaton Transformadores de Dist.FlaKo Man La AmeNazaNo ratings yet
- Basic Types of Facts ControllersDocument22 pagesBasic Types of Facts ControllersMary MorseNo ratings yet
- Reduction of Magnetizing Inrush CurrentDocument7 pagesReduction of Magnetizing Inrush CurrentBruno MoraesNo ratings yet
- Transformer Tap ChangerDocument8 pagesTransformer Tap ChangerNikolai MactavishNo ratings yet
- IEEE White Paper Capacitor Application IssuesDocument14 pagesIEEE White Paper Capacitor Application IssuesVenkat DegaNo ratings yet
- 20060317K Factor PDFDocument34 pages20060317K Factor PDFebrahimNo ratings yet
- General Requirements For Liquid-Immersed Distribution, Power, and Regulating TransformersDocument31 pagesGeneral Requirements For Liquid-Immersed Distribution, Power, and Regulating TransformersvasuNo ratings yet
- Guardamotor Siemens PDFDocument57 pagesGuardamotor Siemens PDFadolfovelasquezNo ratings yet
- Power System Representation Using One Line DiagramsDocument12 pagesPower System Representation Using One Line DiagramsAsif MuhammadNo ratings yet
- Manual Tesys T DeviceNetDocument554 pagesManual Tesys T DeviceNetOscar A Corrales A100% (2)
- Alternator Data SheetDocument1 pageAlternator Data SheetPhel FloresNo ratings yet
- Current Source & Voltage Source InvertersDocument2 pagesCurrent Source & Voltage Source InvertersAhmed El SebaiiNo ratings yet
- StacoAVR2 PDFDocument20 pagesStacoAVR2 PDFmaungNo ratings yet
- Suppressing of Common-Mode Voltage, Shaft Voltage, Leakage Current and EMI Generated by Voltage Source PWM InverterDocument7 pagesSuppressing of Common-Mode Voltage, Shaft Voltage, Leakage Current and EMI Generated by Voltage Source PWM InverterFaissal RachmanNo ratings yet
- Review Sfra PDFDocument17 pagesReview Sfra PDFNeha SharmaNo ratings yet
- StandardsDocument27 pagesStandardsHarsha AnantwarNo ratings yet
- PVS-100 PVS-120 Product Presentation Turkey Feb.2018Document69 pagesPVS-100 PVS-120 Product Presentation Turkey Feb.2018Comsip400No ratings yet
- White Paper VSD Nidec - Single Drive Running Multiple MotorsDocument13 pagesWhite Paper VSD Nidec - Single Drive Running Multiple MotorsRizky SondakhNo ratings yet
- Fusing Equipment: Dual Sensing Bay-O-Net Fuse LinkDocument6 pagesFusing Equipment: Dual Sensing Bay-O-Net Fuse Linksaniya_mirza4No ratings yet
- Nxair enDocument28 pagesNxair endmglennonNo ratings yet
- SPG 4430 0090 DatasheetDocument5 pagesSPG 4430 0090 Datasheetbioadr123No ratings yet
- Etechwin BESS Datasheet en V1.0Document13 pagesEtechwin BESS Datasheet en V1.0kukos setosariNo ratings yet
- Sizing of Power Cables For Circuit Breaker Controlled Feeders Part 2Document8 pagesSizing of Power Cables For Circuit Breaker Controlled Feeders Part 2bpsrichardNo ratings yet
- PQ StacomDocument2 pagesPQ StacomHector BarroetaNo ratings yet
- Circuitos Trifásicos DesequilibradosDocument10 pagesCircuitos Trifásicos DesequilibradosjohnNo ratings yet
- Lecture 4: Transformers: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursDocument96 pagesLecture 4: Transformers: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursRachit Khanna100% (1)
- Turbine Generator Governor Droop Isochronous Fundamentals - A Graphical ApproachDocument8 pagesTurbine Generator Governor Droop Isochronous Fundamentals - A Graphical ApproachRNNo ratings yet
- Rev02 Transformer Modelling Guide1Document304 pagesRev02 Transformer Modelling Guide1Danail DachevNo ratings yet
- Sentinel ManualDocument180 pagesSentinel ManualFernando Bastidas100% (1)
- 8000-Line/Spectra Motor Control Center: Renewal Parts BulletinDocument31 pages8000-Line/Spectra Motor Control Center: Renewal Parts BulletinJesus David Rueda Espinosa100% (1)
- Lecture 7 - Sequence ImpedanceDocument5 pagesLecture 7 - Sequence Impedanceec09364No ratings yet
- By Matthew Clayton Such 2013Document306 pagesBy Matthew Clayton Such 2013Fajar AriNo ratings yet
- Inst Transformer DimensioningDocument8 pagesInst Transformer DimensioningDeepen SharmaNo ratings yet
- PVS 100 120 TL - BCD.00662 - EN - Rev IDocument4 pagesPVS 100 120 TL - BCD.00662 - EN - Rev IAl RANo ratings yet
- Analysis of Dynamic Power Factor Correction Using Flexible Ac Transmission SystemsDocument6 pagesAnalysis of Dynamic Power Factor Correction Using Flexible Ac Transmission SystemsAnikendu MaitraNo ratings yet
- Voltage Regulation GeneratorsDocument29 pagesVoltage Regulation Generatorsprabhakaran_hdecNo ratings yet
- FAS-115DG, Installation Instructions 4189340127 UKDocument5 pagesFAS-115DG, Installation Instructions 4189340127 UKdenilson.rodr1357No ratings yet
- Phase Shifting TransformerDocument3 pagesPhase Shifting TransformerMarcos Baldoceda ValverdeNo ratings yet
- Grounding ABCDDocument8 pagesGrounding ABCDdipenkhandhediyaNo ratings yet
- EE 435 SCR Notes3Document32 pagesEE 435 SCR Notes3Dado GaudiNo ratings yet
- Iec StandardDocument10 pagesIec StandardULTG PAYAKUMBUHNo ratings yet
- Harmonics Notes Grady June 2006 PrintDocument182 pagesHarmonics Notes Grady June 2006 PrintFrancielly MedradoNo ratings yet
- TMEICDocument20 pagesTMEICme_chNo ratings yet
- (Catalog Microturbine) Elliott 243694440 Ta 100 PDFDocument2 pages(Catalog Microturbine) Elliott 243694440 Ta 100 PDFppourmoghaddamNo ratings yet
- Renewable Energy and Jobs - Annual Review 2022From EverandRenewable Energy and Jobs - Annual Review 2022No ratings yet
- Motor Data Sheet 1A 1#360kW, 4pole, 6600VDocument3 pagesMotor Data Sheet 1A 1#360kW, 4pole, 6600Vasyyas100% (1)
- DGA Analysis: Nurul Azmi Bin. Nordin (Company Address)Document14 pagesDGA Analysis: Nurul Azmi Bin. Nordin (Company Address)Azmi NordinNo ratings yet
- SMC HF 24V 30aDocument2 pagesSMC HF 24V 30aLeonardoMartinNo ratings yet
- Protecciones de Tierra de TransformadoresDocument9 pagesProtecciones de Tierra de Transformadoresmaidenheavy1No ratings yet
- High Performance Control of AC Drives with Matlab / Simulink ModelsFrom EverandHigh Performance Control of AC Drives with Matlab / Simulink ModelsNo ratings yet
- Harmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterDocument4 pagesHarmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterNirmalaNeeruNo ratings yet
- Speed Control of DC MotorDocument48 pagesSpeed Control of DC MotorVivek VickyNo ratings yet
- SFC OperationDocument10 pagesSFC OperationKelvin LiewNo ratings yet
- Answer QB 2Document22 pagesAnswer QB 2Goud SannyNo ratings yet
- SnapsDocument1 pageSnapsKypa Meenendra Nath ReddyNo ratings yet
- Integration of PV/Battery Hybrid Energy Conversion System To The Grid With Power Quality Improvement Features. 17)Document1 pageIntegration of PV/Battery Hybrid Energy Conversion System To The Grid With Power Quality Improvement Features. 17)Kypa Meenendra Nath ReddyNo ratings yet
- Srinivasa Institute of Technology and Science, Kadapa. Iv B.Tech I Sem - I Mid Examination-Oct-2014Document2 pagesSrinivasa Institute of Technology and Science, Kadapa. Iv B.Tech I Sem - I Mid Examination-Oct-2014Kypa Meenendra Nath ReddyNo ratings yet
- Controlling of Reactive Power in Multi-Group Current-Sourced HVDC Interconnections With 12 Pulse ConverterDocument2 pagesControlling of Reactive Power in Multi-Group Current-Sourced HVDC Interconnections With 12 Pulse ConverterKypa Meenendra Nath ReddyNo ratings yet
- FPGA Implementation For Simulation of BPSK Modulator: 2.2.14. Adding The System Generator TokenDocument1 pageFPGA Implementation For Simulation of BPSK Modulator: 2.2.14. Adding The System Generator TokenKypa Meenendra Nath ReddyNo ratings yet
- Bits SGPDocument4 pagesBits SGPKypa Meenendra Nath ReddyNo ratings yet
- Regen SWDocument92 pagesRegen SWSubibechanaShawNo ratings yet
- Wind PMSGDocument72 pagesWind PMSGNikol Doar Eu100% (1)
- Reservoir Fluid and Its PropertiesDocument24 pagesReservoir Fluid and Its PropertiesMod Hah GhasdcNo ratings yet
- Internship Report in SipradiDocument25 pagesInternship Report in SipradiSanim Amatya38% (8)
- High Voltage Cable JointingDocument7 pagesHigh Voltage Cable Jointingscrapmail9No ratings yet
- IEA Renewables Information 2011Document498 pagesIEA Renewables Information 2011aksharchandraNo ratings yet
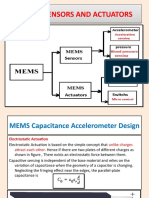
- Memes Sensors and ActuatorsDocument16 pagesMemes Sensors and ActuatorsNaima AlmegryNo ratings yet
- Data Sheet TB 14B: DIN and ANSI-VersionDocument10 pagesData Sheet TB 14B: DIN and ANSI-VersionMostafa ShipishlyNo ratings yet
- Flame PDFDocument2 pagesFlame PDFAlec joshua RapadaNo ratings yet
- Robo WarsDocument10 pagesRobo Warsmanish kumarNo ratings yet
- Standard Industri Pembinaan: Construction Industry Development Board MalaysiaDocument61 pagesStandard Industri Pembinaan: Construction Industry Development Board MalaysiaMeredith Ham Anyi100% (1)
- Differential Amplifier - The Voltage SubtractorDocument11 pagesDifferential Amplifier - The Voltage SubtractorrmmatiNo ratings yet
- 16-PV1800 VHMDocument1 page16-PV1800 VHMDavid Antonio Quintana HerreraNo ratings yet
- PT Arutmin Indonesia Future Product Alternative and Potential MarketDocument6 pagesPT Arutmin Indonesia Future Product Alternative and Potential MarketkresnoNo ratings yet
- 4.SMMS-7 and MiNi SMMS-7 - InstallationDocument50 pages4.SMMS-7 and MiNi SMMS-7 - InstallationTín Nguyễn ThànhNo ratings yet
- Chapter Nine Class 9thDocument10 pagesChapter Nine Class 9thShahbaz KhanNo ratings yet
- Capillary Tube For Refrigeration and Air Conditioning SystemsDocument3 pagesCapillary Tube For Refrigeration and Air Conditioning SystemsIjazzzAliNo ratings yet
- Cable Sizing Sheet - FinalDocument22 pagesCable Sizing Sheet - FinalAmmar Lateef GakharNo ratings yet
- Shift SelectorDocument10 pagesShift SelectorgordomanotasNo ratings yet
- ESG and Circular EconomyDocument22 pagesESG and Circular EconomyMamta GautamNo ratings yet
- Boiler Efficiency Test: Manual InputsDocument7 pagesBoiler Efficiency Test: Manual InputsSHIVAJI CHOUDHURYNo ratings yet
- Switchgear Specification For High Voltage Switchgears CT PT BreakerDocument26 pagesSwitchgear Specification For High Voltage Switchgears CT PT BreakerSumit TyagiNo ratings yet
- Combined Science: Paper 5129/11 Multiple ChoiceDocument15 pagesCombined Science: Paper 5129/11 Multiple Choicemstudy123456No ratings yet
- MasonryDocument44 pagesMasonryCalin AlexandruNo ratings yet
- Stanadyne de Pump Timing InstructionsDocument1 pageStanadyne de Pump Timing InstructionsPiotr Kowal100% (5)
- Han Et Al. - 2023 - Enhanced Thermal Performance by Spatial Chaotic MiDocument13 pagesHan Et Al. - 2023 - Enhanced Thermal Performance by Spatial Chaotic Mimosab.backkupNo ratings yet