Download as pdf or txt
You might also like
- IES Test Prep Answer Explanations For SAT GrammarDocument72 pagesIES Test Prep Answer Explanations For SAT GrammarĐ̸̢͓͉̣͔̭̜̭͉̰́͌͑͊̇̏̕̚͜͜ͅứ̷̢̛̘̭̤͎̩̣̩̊̆̑̓̽̓͗ͅc̴̟͈̠̤̪͈͍̰̟̤̮̆̄̈́̈̃̏̃̑̊͠͝ä̷̧̰̲̦́̒̐͝ṉ̵̾̀͗̾h̷̥͆͑̍͌͆̋̈́́͒͂̇͘̚ Đ̸̢͓͉̣͔̭̜̭͉̰́͌͑͊̇̏̕̚͜͜ͅứ̷̢̛̘̭̤͎̩̣̩̊̆̑̓̽̓͗ͅc̴̟͈̠̤̪͈͍̰̟̤̮̆̄̈́̈̃̏̃̑̊͠͝ä̷̧̰̲̦́̒̐͝ṉ̵̾̀͗̾h̷̥͆͑̍͌͆̋̈́́͒͂̇͘75% (4)
- ENACb 1Document166 pagesENACb 1DarrylpnzNo ratings yet
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 4 out of 5 stars4/5 (4)
- AS1530.7 1998 Part 7 Smoke Control Door and Shutter Assemblies - Ambient and Medium Temperature Leakage Test ProcedureDocument18 pagesAS1530.7 1998 Part 7 Smoke Control Door and Shutter Assemblies - Ambient and Medium Temperature Leakage Test Procedureluke hainesNo ratings yet
- FinalYearProject-DC Motor Speed Control PIC16F877ADocument57 pagesFinalYearProject-DC Motor Speed Control PIC16F877ACata83% (6)
- Yamaha CLP 170 Service ManualDocument122 pagesYamaha CLP 170 Service ManualicaroheartNo ratings yet
- Project PDFDocument43 pagesProject PDFtaddese bekele100% (6)
- Speed Control of DC Motor Using Chopper: Abhishek Kumar Sinha (109ee0309) Badal Kumar Sethy (109ee0304)Document42 pagesSpeed Control of DC Motor Using Chopper: Abhishek Kumar Sinha (109ee0309) Badal Kumar Sethy (109ee0304)rijilpoothadiNo ratings yet
- Modelling and Simulation Speed Control of DC Motor Using PSIMDocument9 pagesModelling and Simulation Speed Control of DC Motor Using PSIMمحمد العراقيNo ratings yet
- Separately Excited DC Motor Speed Control Using Four Quadrant ChopperDocument3 pagesSeparately Excited DC Motor Speed Control Using Four Quadrant ChopperJay S PatelNo ratings yet
- Implementation of Chopper Fed Speed Control of Sep PDFDocument6 pagesImplementation of Chopper Fed Speed Control of Sep PDFDayguel EvansNo ratings yet
- Abstract 1Document14 pagesAbstract 1Shivam VermaNo ratings yet
- DriveDocument7 pagesDrivenaveen jainNo ratings yet
- Project Report On Speed Control of DC Motor by Using PWM TechniqueDocument75 pagesProject Report On Speed Control of DC Motor by Using PWM Techniquepandyamech80% (15)
- Simulation of Closed Loop Control of Buck Converter Fed DC Motor DriveDocument4 pagesSimulation of Closed Loop Control of Buck Converter Fed DC Motor DriveIJSTENo ratings yet
- Gopal Gupta 2K20PES09-1Document18 pagesGopal Gupta 2K20PES09-1Kritu Gupta100% (1)
- Performance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMDocument7 pagesPerformance Study of Power Control Method For Chopper Fed Separately Excited DC (Direct Current) - Drive Using PSIMhusseinNo ratings yet
- Chopper Operation Using PsimDocument7 pagesChopper Operation Using PsimhusseinNo ratings yet
- FinalDocument52 pagesFinalMayank SrivastavaNo ratings yet
- Direct Torque Control: Technical Guide No. 1Document32 pagesDirect Torque Control: Technical Guide No. 1vthiyagain100% (1)
- Four - Quadrant Control SystemsDocument4 pagesFour - Quadrant Control SystemsRICHARDNo ratings yet
- Gopal Gupta 2K20PES09Document23 pagesGopal Gupta 2K20PES09Kritu GuptaNo ratings yet
- Implementation of High Power DC-DC Converter and Speed Control of DC Motor Using DSPDocument9 pagesImplementation of High Power DC-DC Converter and Speed Control of DC Motor Using DSPJosé GonzálezNo ratings yet
- Machines AssignmentDocument7 pagesMachines AssignmentCharles MuneneNo ratings yet
- Mepco Schlenk Engineering CollegeDocument9 pagesMepco Schlenk Engineering CollegeT.JEMIMAPRICILLAHNo ratings yet
- 1.1 TRIAC: BLDEA'S Engineering College DEPARTMENT OF EEE)Document9 pages1.1 TRIAC: BLDEA'S Engineering College DEPARTMENT OF EEE)Sushmita PatilNo ratings yet
- Performance Analysis of Three Phase Full Bridge Converter Controlled DC MotorDocument45 pagesPerformance Analysis of Three Phase Full Bridge Converter Controlled DC Motoranon_451051243No ratings yet
- Micrcontroller Based Cyclo Converter Using Thyristors: Fig. 1 CycloconverterDocument32 pagesMicrcontroller Based Cyclo Converter Using Thyristors: Fig. 1 Cycloconverterपंकज काळेNo ratings yet
- Implementation of Boost Converter Applied For DC Motor DriveDocument51 pagesImplementation of Boost Converter Applied For DC Motor DriveLeri FirdianNo ratings yet
- Chapter 3 - Actuators-1Document42 pagesChapter 3 - Actuators-1NguyenNo ratings yet
- Topic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyDocument13 pagesTopic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyMAr Lon Dela CruzNo ratings yet
- Novel Method PMDC Motor Speed ControlDocument15 pagesNovel Method PMDC Motor Speed ControlTravis WoodNo ratings yet
- Ijert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariDocument4 pagesIjert Ijert: Microcontroller Controlled BLDC Drive For Electric Vehicle Raju Yanamshetti, Juhi Nishat AnsariAvinash Babu KmNo ratings yet
- DC Motor Modeling and Control Using Backstepping Technique p01 12Document12 pagesDC Motor Modeling and Control Using Backstepping Technique p01 12Ali AltahirNo ratings yet
- An Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterDocument5 pagesAn Application of Matlab/Simulink For Speed Control of DC Series Motor Using Buck ConverterArghya MukherjeeNo ratings yet
- Speed Control of DC Motor Using Pulse Width ModulationDocument5 pagesSpeed Control of DC Motor Using Pulse Width ModulationSyed muhammad zaidi100% (1)
- PFC DC-DCDocument8 pagesPFC DC-DCmanda RamuNo ratings yet
- Simulation of Novel Technique For DC Drive For Crane ApplicationDocument5 pagesSimulation of Novel Technique For DC Drive For Crane ApplicationKypa Meenendra Nath Reddy100% (1)
- National Institute of Technology, Rourkela: Department of Electrical EngineeringDocument11 pagesNational Institute of Technology, Rourkela: Department of Electrical Engineeringvineeth kumarNo ratings yet
- Speed Control of D C MOTOR Using Chopper-1308Document7 pagesSpeed Control of D C MOTOR Using Chopper-1308Moon3pellNo ratings yet
- Simulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Document7 pagesSimulation of Brushless DC Motor Speed Control in Matlab-Ijaerdv04i1290151Wairokpam DhanrajNo ratings yet
- VOL - 3-Is-1 Jul2010Document22 pagesVOL - 3-Is-1 Jul2010అనిల్ కుమార్ రాజగిరిNo ratings yet
- AnotherDocument51 pagesAnotherRoopam AmborNo ratings yet
- Bldc motor controlDocument6 pagesBldc motor controlLalithNo ratings yet
- Speed Control of A Conveyor BeltDocument24 pagesSpeed Control of A Conveyor BeltSumu Talal50% (2)
- Topic 6 and 7 - DC and AC DrivesDocument26 pagesTopic 6 and 7 - DC and AC DrivesAvinesh ChandNo ratings yet
- Speed Control of DC Motor Using MOSFET Based ChopperDocument35 pagesSpeed Control of DC Motor Using MOSFET Based ChopperSHREENo ratings yet
- Research Paper On DC Motor ControlDocument8 pagesResearch Paper On DC Motor Controlfvgjcq6aNo ratings yet
- Ijaiem 2013 08 25 054Document11 pagesIjaiem 2013 08 25 054International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- ABB Technical Guide 1 - Direct Torque ControlDocument32 pagesABB Technical Guide 1 - Direct Torque ControlASM_213No ratings yet
- Assosa University: College of Engineering, Department of Mechanical EngineeringDocument22 pagesAssosa University: College of Engineering, Department of Mechanical EngineeringElijah T DhNo ratings yet
- ReportfinalDocument44 pagesReportfinalYuvraj GogoiNo ratings yet
- Neural Controller of DC MotorDocument81 pagesNeural Controller of DC MotorGanesan Ganesh50% (2)
- Design and Implementation of ZCS BUCK CONVERTERDocument51 pagesDesign and Implementation of ZCS BUCK CONVERTERAriful Haque100% (1)
- Speed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiaDocument5 pagesSpeed Control of BLDC Motor Using DSP: 1 4 1 JNTUH Hyderabad, India 2 JNTUH Hyderabad, IndiapravnkumarNo ratings yet
- Answer QB 2Document22 pagesAnswer QB 2Goud SannyNo ratings yet
- PID Controller For A Two Quadrant Chopper Fed DC Motor DriveDocument5 pagesPID Controller For A Two Quadrant Chopper Fed DC Motor DriveSalman HabibNo ratings yet
- Matrix AdvantagesDocument14 pagesMatrix AdvantagesAdeline WinsterNo ratings yet
- PSD DIGITAL NOTES-word CDocument177 pagesPSD DIGITAL NOTES-word CMarupakaNo ratings yet
- Speed Control of A 2HP DC MotorDocument25 pagesSpeed Control of A 2HP DC MotorEdul BrianNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Why Is Secret Love So Important in Gita GovindaDocument7 pagesWhy Is Secret Love So Important in Gita GovindaReeta DuttaNo ratings yet
- Notice For E-Auction of 2 (Two) Residential Plots: Info@wbhidco - inDocument12 pagesNotice For E-Auction of 2 (Two) Residential Plots: Info@wbhidco - inReeta DuttaNo ratings yet
- Advanced Control SystemsDocument1 pageAdvanced Control SystemsReeta DuttaNo ratings yet
- EwsplotsDocument12 pagesEwsplotsReeta DuttaNo ratings yet
- Advertising DesignDocument12 pagesAdvertising DesignReeta DuttaNo ratings yet
- Contact Details English For 22 02 21Document4 pagesContact Details English For 22 02 21Reeta DuttaNo ratings yet
- Sr. No. Name / Address of Unit Nodal Officer Contact Details: View /download List of ItemsDocument2 pagesSr. No. Name / Address of Unit Nodal Officer Contact Details: View /download List of ItemsReeta DuttaNo ratings yet
- All Complaints Forwarded Through Email Should Contain Contact Number & Complete Postal Address of The ComplainantDocument3 pagesAll Complaints Forwarded Through Email Should Contain Contact Number & Complete Postal Address of The ComplainantReeta DuttaNo ratings yet
- Jadavpur University: KOLKATA-700032Document25 pagesJadavpur University: KOLKATA-700032Reeta DuttaNo ratings yet
- EnOcean Occupancy Sensor Operational Description v1.2 04Document11 pagesEnOcean Occupancy Sensor Operational Description v1.2 04Reeta DuttaNo ratings yet
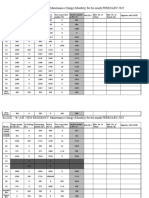
- Maintenance Charge SheetDocument14 pagesMaintenance Charge SheetReeta DuttaNo ratings yet
- TapingDocument3 pagesTapingEdeza MatarumNo ratings yet
- BW Inside CiscoDocument3 pagesBW Inside CiscoMunkhbayar BaadgaiNo ratings yet
- Hilton Chapter 5 Adobe Connect Activity-Based Costing and ManagementDocument11 pagesHilton Chapter 5 Adobe Connect Activity-Based Costing and ManagementyosepjoltNo ratings yet
- Edible Oil - Case StudyDocument8 pagesEdible Oil - Case StudyVansh Raj GautamNo ratings yet
- Lecture 4Document24 pagesLecture 4Geeta AroraNo ratings yet
- Jewellery Shop Design 3dDocument5 pagesJewellery Shop Design 3dTrường Thọ NguyễnNo ratings yet
- Inverse of A FunctionDocument10 pagesInverse of A Functionnitin30100% (2)
- Everlast INTERVAL TRAINING ROUND TIMER PDFDocument1 pageEverlast INTERVAL TRAINING ROUND TIMER PDFanniaanniaNo ratings yet
- 5 - Introduction Q-Series Vs2 Customer Version2Document49 pages5 - Introduction Q-Series Vs2 Customer Version2mahreza189100% (1)
- 3B Reactions of Alcohols and ThiolsDocument27 pages3B Reactions of Alcohols and ThiolsAnloraine GonzalesNo ratings yet
- Sewing Skills Checklist PDFDocument44 pagesSewing Skills Checklist PDFyemkem100% (1)
- NT Seq DatabaseDocument4 pagesNT Seq DatabaseDevinder KaurNo ratings yet
- The Fruit Garden CAL: Columbine & AcanthusDocument7 pagesThe Fruit Garden CAL: Columbine & AcanthusMiraNo ratings yet
- Make List SLTD-J-1401-L-6-00003-02Document4 pagesMake List SLTD-J-1401-L-6-00003-02tribhuvan ShankarNo ratings yet
- Model 621 LR B Data SheetDocument1 pageModel 621 LR B Data SheetMohammed GallowNo ratings yet
- TPS54160 1.5-A, 60-V, Step-Down DC/DC Converter With Eco-Mode™Document57 pagesTPS54160 1.5-A, 60-V, Step-Down DC/DC Converter With Eco-Mode™sbrhomeNo ratings yet
- Straumann Product Catalogue 2018 2019Document260 pagesStraumann Product Catalogue 2018 2019kllasikalleNo ratings yet
- Battles Fought On The Great Wall of China Qin DynastyDocument2 pagesBattles Fought On The Great Wall of China Qin DynastySachin NagmotiNo ratings yet
- Exercise # 1: Statistics and ProbabilityDocument6 pagesExercise # 1: Statistics and ProbabilityAszyla ArzaNo ratings yet
- OHara PDFDocument17 pagesOHara PDFTomás HidalgoNo ratings yet
- CSC 2701 - CalculusDocument5 pagesCSC 2701 - CalculusMd Rubaiyat BhuiyanNo ratings yet
- Drawing Details: Cie 332 Quantity Surveying and Estimation Lecture Two Lecturer: Eng. Goodson MashekaDocument23 pagesDrawing Details: Cie 332 Quantity Surveying and Estimation Lecture Two Lecturer: Eng. Goodson MashekaPerpetual hubbyNo ratings yet
- Cobra XRS9690Document45 pagesCobra XRS9690marwan71No ratings yet
- Tutorial-2 - Heterocycles Nomenclature-Part-IIDocument18 pagesTutorial-2 - Heterocycles Nomenclature-Part-IIamirNo ratings yet
- Is-Cal01 Design Carbon Accounting On Site Rev.02Document6 pagesIs-Cal01 Design Carbon Accounting On Site Rev.02shoba9945No ratings yet
- Dhauliganga ProjectDocument2 pagesDhauliganga ProjectAntra Chowdhury100% (1)