
Playful Puppy Robot Instruction Manual
Playful Puppy Robot Instruction Manual
You might also like
- Schwinn Stingray OCC Chopper Bicycle Motor Kit PlansDocument38 pagesSchwinn Stingray OCC Chopper Bicycle Motor Kit PlansLiveFastMotors81% (16)
- OpenROV Assembly GuideDocument78 pagesOpenROV Assembly GuideJavier Andrés Lopez Verdugo100% (1)
- 4 Stroke Shift Kit Installation InstructionsDocument15 pages4 Stroke Shift Kit Installation InstructionsJ. RussellNo ratings yet
- Workover OpertionsDocument365 pagesWorkover Opertionsjayant89% (9)
- Trimline 7600Document22 pagesTrimline 7600Mark Cuff100% (1)
- Craftsman Dovetail TemplateDocument16 pagesCraftsman Dovetail TemplateEvan MosemanNo ratings yet
- $75 DIY Slider PDF GuideDocument53 pages$75 DIY Slider PDF GuideĐorđe Radić100% (1)
- 2015 02 Fall Protection Test and Answer KeyDocument2 pages2015 02 Fall Protection Test and Answer KeyR.Ranjan PradhanNo ratings yet
- Worm Harvester 212011Document0 pagesWorm Harvester 212011mattpac3No ratings yet
- Rear Mount Chain Drive Bicycle Motor Kit PlansDocument39 pagesRear Mount Chain Drive Bicycle Motor Kit PlansLiveFastMotors50% (2)
- Tesla Model S Rear Door Handle ReplacementDocument12 pagesTesla Model S Rear Door Handle ReplacementAnonymous TjcIWjNo ratings yet
- Uselessbox Manual v13 Gm3 Oct122011Document16 pagesUselessbox Manual v13 Gm3 Oct122011pqr1100% (1)
- DTC P0341: CMP Sensor A and CKP Sensor Incorrect Phase DetectedDocument4 pagesDTC P0341: CMP Sensor A and CKP Sensor Incorrect Phase Detectedmzcz3866100% (1)
- TMP 20098-Keithley 236 237 Source Measure Unit SMU Service Manual and Schematics1317144693Document138 pagesTMP 20098-Keithley 236 237 Source Measure Unit SMU Service Manual and Schematics1317144693AlajkoNo ratings yet
- Robotic Arm Diy Tutorial WrittenDocument19 pagesRobotic Arm Diy Tutorial WrittenMehran MeerNo ratings yet
- Manual QuadrupedeDocument6 pagesManual QuadrupedeLLEHCIMNo ratings yet
- Hexapod Assembly Manual PDFDocument3 pagesHexapod Assembly Manual PDFFederico Purros BressanNo ratings yet
- Robot Claw Tutorial: Robotic Claw Medium ServoDocument7 pagesRobot Claw Tutorial: Robotic Claw Medium ServoMiguelDelBarrioIglesisasNo ratings yet
- Pocket Sized Me ArmDocument30 pagesPocket Sized Me ArmMahmood AhmadNo ratings yet
- Robotic Arm 4DOFDocument20 pagesRobotic Arm 4DOFMahmood AhmadNo ratings yet
- The Useless Machine: Instructions GuideDocument20 pagesThe Useless Machine: Instructions GuideDDNo ratings yet
- Voron B - The ManualDocument63 pagesVoron B - The ManualDaniel Leonardo AlbeNo ratings yet
- Motokolo Manual001 Rev ADocument18 pagesMotokolo Manual001 Rev AViktor BurkertNo ratings yet
- Bernina Inernational v. Handi QuilterDocument30 pagesBernina Inernational v. Handi QuilterPriorSmartNo ratings yet
- 17DOF Humonoid RobotDocument30 pages17DOF Humonoid RobotRamani NairNo ratings yet
- PulidorDocument10 pagesPulidorhg187271No ratings yet
- Syringe Pump Build GuideDocument16 pagesSyringe Pump Build GuideAnonymous mE6MEje0No ratings yet
- Owner'S Manual: Z100 / Z300 Z500 Z700Document16 pagesOwner'S Manual: Z100 / Z300 Z500 Z700A de LegaspiNo ratings yet
- Firecharger Installation ADocument10 pagesFirecharger Installation AAugmotorsNo ratings yet
- DID Chain Tool Inst - 150Document2 pagesDID Chain Tool Inst - 150Ed FalckNo ratings yet
- GoPro Hero6 - 7 Black Disassembly GuideDocument14 pagesGoPro Hero6 - 7 Black Disassembly GuidebananantminerNo ratings yet
- 3 D Printer ManualDocument14 pages3 D Printer ManualyuliantoNo ratings yet
- Folgertech Prusa I3 Build Manual v1.1Document74 pagesFolgertech Prusa I3 Build Manual v1.1DonutdealerdNo ratings yet
- Using A Chain BreakerDocument4 pagesUsing A Chain BreakerlusthawkNo ratings yet
- 17DOF Humonoid RobotDocument31 pages17DOF Humonoid RobotDjakson Cleber GonçalvesNo ratings yet
- P.L.a. V1.1 Assembly GuideDocument28 pagesP.L.a. V1.1 Assembly Guidetet169No ratings yet
- IRIS Replacing The Arms VADocument1 pageIRIS Replacing The Arms VAroberoayonNo ratings yet
- Angle Grinder Tube Pipe Sander Polishing AttachmenDocument14 pagesAngle Grinder Tube Pipe Sander Polishing AttachmenEdmar DL100% (1)
- Eagle Eyes Antenna Pan/Tilt Assembly InstructionsDocument12 pagesEagle Eyes Antenna Pan/Tilt Assembly InstructionsdanielNo ratings yet
- Reprap Prusa Mendel Build Manual - 2Document14 pagesReprap Prusa Mendel Build Manual - 2Laxmikanth ReddyNo ratings yet
- Instruction Manual: SpecificationDocument16 pagesInstruction Manual: SpecificationFabian Etchenique0% (1)
- Building A Simple Pendulum and Measuring Motion With Arduino and PythonDocument10 pagesBuilding A Simple Pendulum and Measuring Motion With Arduino and PythonSarifudin HusniNo ratings yet
- Installation Instructions Winch Mounting Kit: Part Number: 74180 Application: Honda Foreman 500 & Honda RubiconDocument14 pagesInstallation Instructions Winch Mounting Kit: Part Number: 74180 Application: Honda Foreman 500 & Honda RubiconManuel Castro EdiolaNo ratings yet
- The Servo Motor - IntroductionDocument13 pagesThe Servo Motor - IntroductionbobbyccwNo ratings yet
- Ender Xtender XL Installation GuideDocument18 pagesEnder Xtender XL Installation GuideAnonymous w6GMxAPOYBNo ratings yet
- Ecksbot Electronics InstructionsDocument78 pagesEcksbot Electronics InstructionsjohnNo ratings yet
- Simplified 3D Printed Animatronic Dual Eye MechaniDocument9 pagesSimplified 3D Printed Animatronic Dual Eye MechaniYOUNES KABBAJNo ratings yet
- Mini Sewing Machine GuideDocument14 pagesMini Sewing Machine Guiderobinhomoroka5No ratings yet
- Honda Civic Aftermarket Head Unit Installation GuideDocument8 pagesHonda Civic Aftermarket Head Unit Installation GuidemikailvalvesNo ratings yet
- Manual For Stingray X2 Tattoo Machine en Rev1Document23 pagesManual For Stingray X2 Tattoo Machine en Rev1Felipe G. J Olivos De QuintoNo ratings yet
- 2014-20 Ford F150 2" Suspension KitDocument9 pages2014-20 Ford F150 2" Suspension Kitomar.chucandiroNo ratings yet
- Fireball Ignition PDFDocument14 pagesFireball Ignition PDFLucian LeonteNo ratings yet
- 27 1405 Saturn Vue Installation Instructions CaridDocument2 pages27 1405 Saturn Vue Installation Instructions CaridenthonytopmakNo ratings yet
- Universal Steering Column: For 8-Position TiltDocument8 pagesUniversal Steering Column: For 8-Position TiltMauritz GroblerNo ratings yet
- Manual r19Document113 pagesManual r19shrinivasrmNo ratings yet
- AR4-MK2 Robot Manul 1.3Document384 pagesAR4-MK2 Robot Manul 1.3anh.phamanh27No ratings yet
- Reciprocator Compact Single and MultiheadDocument14 pagesReciprocator Compact Single and MultiheadjoecentroneNo ratings yet
- Vinyl Cutter Instructions - ALL LANGUAGESDocument52 pagesVinyl Cutter Instructions - ALL LANGUAGESaaron muñoz salgadoNo ratings yet
- Instructions For The Estart Kit XR400Document14 pagesInstructions For The Estart Kit XR400Obed VasquezNo ratings yet
- How To Fine Tune Your 3D Printer ENDER 3Document87 pagesHow To Fine Tune Your 3D Printer ENDER 3Michaël Memeteau100% (5)
- 034 601 0024 Install GuideDocument8 pages034 601 0024 Install GuideAlexNo ratings yet
- For Quadrant DC Motor ControlDocument43 pagesFor Quadrant DC Motor ControlDarshanRupani100% (1)
- Print Robocut α -1iEDocument5 pagesPrint Robocut α -1iEangelNo ratings yet
- TEAM 1.2: Nguyễn Thái Dương Nguyễn Minh Hiếu Hoàng Văn Hưng Nguyễn Trọng Quang HuyDocument25 pagesTEAM 1.2: Nguyễn Thái Dương Nguyễn Minh Hiếu Hoàng Văn Hưng Nguyễn Trọng Quang HuyNguyễn Trọng Quang HuyNo ratings yet
- Grundfos Machine SelectionDocument8 pagesGrundfos Machine SelectionMussie BekeleNo ratings yet
- 120V-PV3600 TLVDocument1 page120V-PV3600 TLVrobertralexNo ratings yet
- 32200101Document4 pages32200101bnolasco0% (1)
- Intelidrive Lite DatasheetDocument4 pagesIntelidrive Lite DatasheetArnoud NegraoNo ratings yet
- DBH Commercial: Base Efficiency Heat Pump Belt-Drive Packaged Rooftop Unit DBH Commercial 3-5 Nominal TonsDocument40 pagesDBH Commercial: Base Efficiency Heat Pump Belt-Drive Packaged Rooftop Unit DBH Commercial 3-5 Nominal TonsChin Heng LimNo ratings yet
- I C Master With WISHBONE Bus Interface: FeaturesDocument12 pagesI C Master With WISHBONE Bus Interface: FeaturessindNo ratings yet
- Fixed Co2 Fire Fighting SystemDocument20 pagesFixed Co2 Fire Fighting SystemMagesh ShanmughamNo ratings yet
- NETZSCH Fine Cutting Mill CS-Z eDocument8 pagesNETZSCH Fine Cutting Mill CS-Z eCastillo Rangel AntonioNo ratings yet
- 16 Bits MicrocontrollersDocument5 pages16 Bits MicrocontrollersGabriel VillanuevaNo ratings yet
- 3RU21264AB0 Datasheet enDocument8 pages3RU21264AB0 Datasheet enPaseNo ratings yet
- Audio System: E4 (A), E5 (B), E6 (C), E53 (D)Document4 pagesAudio System: E4 (A), E5 (B), E6 (C), E53 (D)dadang lukmanulhakimNo ratings yet
- Massey Ferguson 35 TroubleshootingDocument3 pagesMassey Ferguson 35 TroubleshootingrickyNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotRohit sharmaNo ratings yet
- ANT-ADU4518R6v01-1882 DatasheetDocument2 pagesANT-ADU4518R6v01-1882 DatasheetPedro Marroquin86% (7)
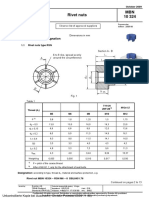
- Daimler MBN 10324 10-09 EngDocument13 pagesDaimler MBN 10324 10-09 Enggültekin gökNo ratings yet
- STR-K760P v1.1Document44 pagesSTR-K760P v1.1danielradu27No ratings yet
- Deutz Fahr AGROTRON TTV 1160 Tractor Service Repair ManualDocument20 pagesDeutz Fahr AGROTRON TTV 1160 Tractor Service Repair ManuallaopaodunNo ratings yet
- Accumass Bw500: Instruction Manual May 2002Document150 pagesAccumass Bw500: Instruction Manual May 2002louiswang1964No ratings yet
- Transfere de 3 PolosDocument12 pagesTransfere de 3 PolosDomingo RuizNo ratings yet
- User Manual en Underwater-Light EL-H200 EMLI16082533Document2 pagesUser Manual en Underwater-Light EL-H200 EMLI16082533juanjtoroNo ratings yet
- Process Specification: Docmaster: Uncontrolled Copy When PrintedDocument30 pagesProcess Specification: Docmaster: Uncontrolled Copy When PrintedCemre BağbozanNo ratings yet
- Wolff 180b ManualDocument422 pagesWolff 180b ManualRichardNo ratings yet
- Warning: ESD5100 Series Speed Control UnitDocument6 pagesWarning: ESD5100 Series Speed Control Unitinstrumentacion.hsrNo ratings yet
























































































Download as pdf or txt
You might also like
- Schwinn Stingray OCC Chopper Bicycle Motor Kit PlansDocument38 pagesSchwinn Stingray OCC Chopper Bicycle Motor Kit PlansLiveFastMotors81% (16)
- OpenROV Assembly GuideDocument78 pagesOpenROV Assembly GuideJavier Andrés Lopez Verdugo100% (1)
- 4 Stroke Shift Kit Installation InstructionsDocument15 pages4 Stroke Shift Kit Installation InstructionsJ. RussellNo ratings yet
- Workover OpertionsDocument365 pagesWorkover Opertionsjayant89% (9)
- Trimline 7600Document22 pagesTrimline 7600Mark Cuff100% (1)
- Craftsman Dovetail TemplateDocument16 pagesCraftsman Dovetail TemplateEvan MosemanNo ratings yet
- $75 DIY Slider PDF GuideDocument53 pages$75 DIY Slider PDF GuideĐorđe Radić100% (1)
- 2015 02 Fall Protection Test and Answer KeyDocument2 pages2015 02 Fall Protection Test and Answer KeyR.Ranjan PradhanNo ratings yet
- Worm Harvester 212011Document0 pagesWorm Harvester 212011mattpac3No ratings yet
- Rear Mount Chain Drive Bicycle Motor Kit PlansDocument39 pagesRear Mount Chain Drive Bicycle Motor Kit PlansLiveFastMotors50% (2)
- Tesla Model S Rear Door Handle ReplacementDocument12 pagesTesla Model S Rear Door Handle ReplacementAnonymous TjcIWjNo ratings yet
- Uselessbox Manual v13 Gm3 Oct122011Document16 pagesUselessbox Manual v13 Gm3 Oct122011pqr1100% (1)
- DTC P0341: CMP Sensor A and CKP Sensor Incorrect Phase DetectedDocument4 pagesDTC P0341: CMP Sensor A and CKP Sensor Incorrect Phase Detectedmzcz3866100% (1)
- TMP 20098-Keithley 236 237 Source Measure Unit SMU Service Manual and Schematics1317144693Document138 pagesTMP 20098-Keithley 236 237 Source Measure Unit SMU Service Manual and Schematics1317144693AlajkoNo ratings yet
- Robotic Arm Diy Tutorial WrittenDocument19 pagesRobotic Arm Diy Tutorial WrittenMehran MeerNo ratings yet
- Manual QuadrupedeDocument6 pagesManual QuadrupedeLLEHCIMNo ratings yet
- Hexapod Assembly Manual PDFDocument3 pagesHexapod Assembly Manual PDFFederico Purros BressanNo ratings yet
- Robot Claw Tutorial: Robotic Claw Medium ServoDocument7 pagesRobot Claw Tutorial: Robotic Claw Medium ServoMiguelDelBarrioIglesisasNo ratings yet
- Pocket Sized Me ArmDocument30 pagesPocket Sized Me ArmMahmood AhmadNo ratings yet
- Robotic Arm 4DOFDocument20 pagesRobotic Arm 4DOFMahmood AhmadNo ratings yet
- The Useless Machine: Instructions GuideDocument20 pagesThe Useless Machine: Instructions GuideDDNo ratings yet
- Voron B - The ManualDocument63 pagesVoron B - The ManualDaniel Leonardo AlbeNo ratings yet
- Motokolo Manual001 Rev ADocument18 pagesMotokolo Manual001 Rev AViktor BurkertNo ratings yet
- Bernina Inernational v. Handi QuilterDocument30 pagesBernina Inernational v. Handi QuilterPriorSmartNo ratings yet
- 17DOF Humonoid RobotDocument30 pages17DOF Humonoid RobotRamani NairNo ratings yet
- PulidorDocument10 pagesPulidorhg187271No ratings yet
- Syringe Pump Build GuideDocument16 pagesSyringe Pump Build GuideAnonymous mE6MEje0No ratings yet
- Owner'S Manual: Z100 / Z300 Z500 Z700Document16 pagesOwner'S Manual: Z100 / Z300 Z500 Z700A de LegaspiNo ratings yet
- Firecharger Installation ADocument10 pagesFirecharger Installation AAugmotorsNo ratings yet
- DID Chain Tool Inst - 150Document2 pagesDID Chain Tool Inst - 150Ed FalckNo ratings yet
- GoPro Hero6 - 7 Black Disassembly GuideDocument14 pagesGoPro Hero6 - 7 Black Disassembly GuidebananantminerNo ratings yet
- 3 D Printer ManualDocument14 pages3 D Printer ManualyuliantoNo ratings yet
- Folgertech Prusa I3 Build Manual v1.1Document74 pagesFolgertech Prusa I3 Build Manual v1.1DonutdealerdNo ratings yet
- Using A Chain BreakerDocument4 pagesUsing A Chain BreakerlusthawkNo ratings yet
- 17DOF Humonoid RobotDocument31 pages17DOF Humonoid RobotDjakson Cleber GonçalvesNo ratings yet
- P.L.a. V1.1 Assembly GuideDocument28 pagesP.L.a. V1.1 Assembly Guidetet169No ratings yet
- IRIS Replacing The Arms VADocument1 pageIRIS Replacing The Arms VAroberoayonNo ratings yet
- Angle Grinder Tube Pipe Sander Polishing AttachmenDocument14 pagesAngle Grinder Tube Pipe Sander Polishing AttachmenEdmar DL100% (1)
- Eagle Eyes Antenna Pan/Tilt Assembly InstructionsDocument12 pagesEagle Eyes Antenna Pan/Tilt Assembly InstructionsdanielNo ratings yet
- Reprap Prusa Mendel Build Manual - 2Document14 pagesReprap Prusa Mendel Build Manual - 2Laxmikanth ReddyNo ratings yet
- Instruction Manual: SpecificationDocument16 pagesInstruction Manual: SpecificationFabian Etchenique0% (1)
- Building A Simple Pendulum and Measuring Motion With Arduino and PythonDocument10 pagesBuilding A Simple Pendulum and Measuring Motion With Arduino and PythonSarifudin HusniNo ratings yet
- Installation Instructions Winch Mounting Kit: Part Number: 74180 Application: Honda Foreman 500 & Honda RubiconDocument14 pagesInstallation Instructions Winch Mounting Kit: Part Number: 74180 Application: Honda Foreman 500 & Honda RubiconManuel Castro EdiolaNo ratings yet
- The Servo Motor - IntroductionDocument13 pagesThe Servo Motor - IntroductionbobbyccwNo ratings yet
- Ender Xtender XL Installation GuideDocument18 pagesEnder Xtender XL Installation GuideAnonymous w6GMxAPOYBNo ratings yet
- Ecksbot Electronics InstructionsDocument78 pagesEcksbot Electronics InstructionsjohnNo ratings yet
- Simplified 3D Printed Animatronic Dual Eye MechaniDocument9 pagesSimplified 3D Printed Animatronic Dual Eye MechaniYOUNES KABBAJNo ratings yet
- Mini Sewing Machine GuideDocument14 pagesMini Sewing Machine Guiderobinhomoroka5No ratings yet
- Honda Civic Aftermarket Head Unit Installation GuideDocument8 pagesHonda Civic Aftermarket Head Unit Installation GuidemikailvalvesNo ratings yet
- Manual For Stingray X2 Tattoo Machine en Rev1Document23 pagesManual For Stingray X2 Tattoo Machine en Rev1Felipe G. J Olivos De QuintoNo ratings yet
- 2014-20 Ford F150 2" Suspension KitDocument9 pages2014-20 Ford F150 2" Suspension Kitomar.chucandiroNo ratings yet
- Fireball Ignition PDFDocument14 pagesFireball Ignition PDFLucian LeonteNo ratings yet
- 27 1405 Saturn Vue Installation Instructions CaridDocument2 pages27 1405 Saturn Vue Installation Instructions CaridenthonytopmakNo ratings yet
- Universal Steering Column: For 8-Position TiltDocument8 pagesUniversal Steering Column: For 8-Position TiltMauritz GroblerNo ratings yet
- Manual r19Document113 pagesManual r19shrinivasrmNo ratings yet
- AR4-MK2 Robot Manul 1.3Document384 pagesAR4-MK2 Robot Manul 1.3anh.phamanh27No ratings yet
- Reciprocator Compact Single and MultiheadDocument14 pagesReciprocator Compact Single and MultiheadjoecentroneNo ratings yet
- Vinyl Cutter Instructions - ALL LANGUAGESDocument52 pagesVinyl Cutter Instructions - ALL LANGUAGESaaron muñoz salgadoNo ratings yet
- Instructions For The Estart Kit XR400Document14 pagesInstructions For The Estart Kit XR400Obed VasquezNo ratings yet
- How To Fine Tune Your 3D Printer ENDER 3Document87 pagesHow To Fine Tune Your 3D Printer ENDER 3Michaël Memeteau100% (5)
- 034 601 0024 Install GuideDocument8 pages034 601 0024 Install GuideAlexNo ratings yet
- For Quadrant DC Motor ControlDocument43 pagesFor Quadrant DC Motor ControlDarshanRupani100% (1)
- Print Robocut α -1iEDocument5 pagesPrint Robocut α -1iEangelNo ratings yet
- TEAM 1.2: Nguyễn Thái Dương Nguyễn Minh Hiếu Hoàng Văn Hưng Nguyễn Trọng Quang HuyDocument25 pagesTEAM 1.2: Nguyễn Thái Dương Nguyễn Minh Hiếu Hoàng Văn Hưng Nguyễn Trọng Quang HuyNguyễn Trọng Quang HuyNo ratings yet
- Grundfos Machine SelectionDocument8 pagesGrundfos Machine SelectionMussie BekeleNo ratings yet
- 120V-PV3600 TLVDocument1 page120V-PV3600 TLVrobertralexNo ratings yet
- 32200101Document4 pages32200101bnolasco0% (1)
- Intelidrive Lite DatasheetDocument4 pagesIntelidrive Lite DatasheetArnoud NegraoNo ratings yet
- DBH Commercial: Base Efficiency Heat Pump Belt-Drive Packaged Rooftop Unit DBH Commercial 3-5 Nominal TonsDocument40 pagesDBH Commercial: Base Efficiency Heat Pump Belt-Drive Packaged Rooftop Unit DBH Commercial 3-5 Nominal TonsChin Heng LimNo ratings yet
- I C Master With WISHBONE Bus Interface: FeaturesDocument12 pagesI C Master With WISHBONE Bus Interface: FeaturessindNo ratings yet
- Fixed Co2 Fire Fighting SystemDocument20 pagesFixed Co2 Fire Fighting SystemMagesh ShanmughamNo ratings yet
- NETZSCH Fine Cutting Mill CS-Z eDocument8 pagesNETZSCH Fine Cutting Mill CS-Z eCastillo Rangel AntonioNo ratings yet
- 16 Bits MicrocontrollersDocument5 pages16 Bits MicrocontrollersGabriel VillanuevaNo ratings yet
- 3RU21264AB0 Datasheet enDocument8 pages3RU21264AB0 Datasheet enPaseNo ratings yet
- Audio System: E4 (A), E5 (B), E6 (C), E53 (D)Document4 pagesAudio System: E4 (A), E5 (B), E6 (C), E53 (D)dadang lukmanulhakimNo ratings yet
- Massey Ferguson 35 TroubleshootingDocument3 pagesMassey Ferguson 35 TroubleshootingrickyNo ratings yet
- Line Follower RobotDocument16 pagesLine Follower RobotRohit sharmaNo ratings yet
- ANT-ADU4518R6v01-1882 DatasheetDocument2 pagesANT-ADU4518R6v01-1882 DatasheetPedro Marroquin86% (7)
- Daimler MBN 10324 10-09 EngDocument13 pagesDaimler MBN 10324 10-09 Enggültekin gökNo ratings yet
- STR-K760P v1.1Document44 pagesSTR-K760P v1.1danielradu27No ratings yet
- Deutz Fahr AGROTRON TTV 1160 Tractor Service Repair ManualDocument20 pagesDeutz Fahr AGROTRON TTV 1160 Tractor Service Repair ManuallaopaodunNo ratings yet
- Accumass Bw500: Instruction Manual May 2002Document150 pagesAccumass Bw500: Instruction Manual May 2002louiswang1964No ratings yet
- Transfere de 3 PolosDocument12 pagesTransfere de 3 PolosDomingo RuizNo ratings yet
- User Manual en Underwater-Light EL-H200 EMLI16082533Document2 pagesUser Manual en Underwater-Light EL-H200 EMLI16082533juanjtoroNo ratings yet
- Process Specification: Docmaster: Uncontrolled Copy When PrintedDocument30 pagesProcess Specification: Docmaster: Uncontrolled Copy When PrintedCemre BağbozanNo ratings yet
- Wolff 180b ManualDocument422 pagesWolff 180b ManualRichardNo ratings yet
- Warning: ESD5100 Series Speed Control UnitDocument6 pagesWarning: ESD5100 Series Speed Control Unitinstrumentacion.hsrNo ratings yet