
Mathematical Modeling of Interacting and Non Interacting Tank System
Mathematical Modeling of Interacting and Non Interacting Tank System
You might also like
- DEN5200 CONTROL SYSTEMS ANLAYSIS AND DESIGN ReportDocument15 pagesDEN5200 CONTROL SYSTEMS ANLAYSIS AND DESIGN Reportsilvia100% (1)
- Computer-Controlled Systems: Theory and Design, Third EditionFrom EverandComputer-Controlled Systems: Theory and Design, Third EditionRating: 3 out of 5 stars3/5 (4)
- Implementation of Fuzzy and PID Controller To Water Level System Using LabView PDFDocument5 pagesImplementation of Fuzzy and PID Controller To Water Level System Using LabView PDFFrances RaphaelNo ratings yet
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- System Identification and Modeling For Interacting and Non-Interacting Tank Systems Using Intelligent TechniquesDocument15 pagesSystem Identification and Modeling For Interacting and Non-Interacting Tank Systems Using Intelligent TechniquesMandy DiazNo ratings yet
- PID Controller Design For Two Tanks Liquid Level Control System Using MatlabDocument6 pagesPID Controller Design For Two Tanks Liquid Level Control System Using MatlabInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Study of Model Predictive Control Using Ni LabviewDocument10 pagesStudy of Model Predictive Control Using Ni LabviewBrankko Jhonathan Torres SaavedraNo ratings yet
- Chapter 2Document40 pagesChapter 2Halkawt G MuhammadNo ratings yet
- A Continuous Stirred Tank Heater Simulation Model With ApplicationsDocument14 pagesA Continuous Stirred Tank Heater Simulation Model With ApplicationsHao LuoNo ratings yet
- 07 - Chemical Process SimulationDocument16 pages07 - Chemical Process SimulationChatchan67% (3)
- Modeling Water Supply System Control System Algorithms: SciencedirectDocument10 pagesModeling Water Supply System Control System Algorithms: SciencedirectKheav KimlengNo ratings yet
- 2015-Adaptive Multi-Loop Fractional Order PID - USBDocument8 pages2015-Adaptive Multi-Loop Fractional Order PID - USBAravindan MohanNo ratings yet
- Modelling and Control of Coupled Tank Liquid Level System Using Backstepping Method IJERTV4IS060710Document5 pagesModelling and Control of Coupled Tank Liquid Level System Using Backstepping Method IJERTV4IS060710Juan Sebastian Hincapie MontesNo ratings yet
- UNIT-V 14.04.2020 4-5pmDocument13 pagesUNIT-V 14.04.2020 4-5pmVikas MishraNo ratings yet
- Process Control Laboratory Experiments Using Labview: Asession 3220Document15 pagesProcess Control Laboratory Experiments Using Labview: Asession 3220Ali AbdullahNo ratings yet
- Genetic Algorithm Techniques For Calibrating Network ModelsDocument44 pagesGenetic Algorithm Techniques For Calibrating Network ModelsAde YahyaNo ratings yet
- Introduction To Control Engineering Modeling, Analysis and Design - Ajit K. MandalDocument633 pagesIntroduction To Control Engineering Modeling, Analysis and Design - Ajit K. MandalClara Garrido PNo ratings yet
- Hydro Turbin - 3 PaperDocument19 pagesHydro Turbin - 3 PaperSyamsul Bahry HarahapNo ratings yet
- Analysis of Modelling Methods of Quadruple Tank SystemDocument15 pagesAnalysis of Modelling Methods of Quadruple Tank Systemcosmos35No ratings yet
- Icramid 52Document10 pagesIcramid 52SundaraPandiyanNo ratings yet
- Process-Oriented Analysis: Weber@produktion - Bepr.ethz - CHDocument6 pagesProcess-Oriented Analysis: Weber@produktion - Bepr.ethz - CHTegar EpheNo ratings yet
- Model Based Control of A Four-Tank SystemDocument6 pagesModel Based Control of A Four-Tank SystemJuan Manuel MauroNo ratings yet
- A Complete Mathematical Modeling, Simulation and Computational Implementation of Boost Converter Via MATLAB/SimulinkDocument15 pagesA Complete Mathematical Modeling, Simulation and Computational Implementation of Boost Converter Via MATLAB/SimulinkSado KubsaNo ratings yet
- A Complete Mathematical Modeling, SimulationDocument15 pagesA Complete Mathematical Modeling, Simulationosama1928No ratings yet
- Level Control (Tank 1) of Coupled Tank Liquid Level System Using Integral Control State Feedback ControllerDocument25 pagesLevel Control (Tank 1) of Coupled Tank Liquid Level System Using Integral Control State Feedback ControllerVolkan KaradedeNo ratings yet
- PHD Research Plannin2Document7 pagesPHD Research Plannin2CharlesNo ratings yet
- TUHH - Kreitz - Arriola - Virtual Performance Evaluation For Electro-Mechanical Actuators Considering Parameter UncertaintiesDocument7 pagesTUHH - Kreitz - Arriola - Virtual Performance Evaluation For Electro-Mechanical Actuators Considering Parameter Uncertaintiessvp3761No ratings yet
- Design of Embedded Microcontroller For Controlling and Monitoring Blood PumpDocument8 pagesDesign of Embedded Microcontroller For Controlling and Monitoring Blood PumpGEORGE MYLONASNo ratings yet
- Mechatronic Design Solution For Fuel Level Monitoring Using Pressure Sensor PDFDocument8 pagesMechatronic Design Solution For Fuel Level Monitoring Using Pressure Sensor PDFJohn Renz M. CleofasNo ratings yet
- Ijmer 46066571 PDFDocument7 pagesIjmer 46066571 PDFIJMERNo ratings yet
- PIContoller Researchand DesignDocument14 pagesPIContoller Researchand DesignRASCOR VADERNo ratings yet
- Pipelining PDFDocument19 pagesPipelining PDFriyazpashaNo ratings yet
- PLC Based Liquid Filling and Mixing-1227Document5 pagesPLC Based Liquid Filling and Mixing-1227Castellani SolisNo ratings yet
- 9 Challenges 2013Document9 pages9 Challenges 2013sajjad moradiNo ratings yet
- Jurnal Proses ManufakturDocument6 pagesJurnal Proses ManufakturNur RokhimNo ratings yet
- IEEE 6 Bus System in PSAT PaperDocument7 pagesIEEE 6 Bus System in PSAT PaperJulie OsborneNo ratings yet
- 1 s2.0 S0019057821001038 MainDocument17 pages1 s2.0 S0019057821001038 MainYassine El BarakyNo ratings yet
- MCT Lab ManualDocument75 pagesMCT Lab ManualManeeshNo ratings yet
- Identification of Longitudinal Aircraft Dynamics by Process Model Using Matlab/SimulinkDocument4 pagesIdentification of Longitudinal Aircraft Dynamics by Process Model Using Matlab/SimulinkEditor IJSETNo ratings yet
- Simulators For Risk AssessmentDocument20 pagesSimulators For Risk Assessmentajrojas1359100% (1)
- Integrating Measurement Instruments in Pneumatic Lab ActivitiesDocument9 pagesIntegrating Measurement Instruments in Pneumatic Lab ActivitiesMuftah AhmedNo ratings yet
- PSO Optimized PID Controller Design For The Process Liquid Level ControlDocument5 pagesPSO Optimized PID Controller Design For The Process Liquid Level ControlgadaNo ratings yet
- Comparing Pressure Flow Solvers For Dinamic SimulationDocument24 pagesComparing Pressure Flow Solvers For Dinamic SimulationEdgar HuancaNo ratings yet
- ASIC Design of A High Speed Low Power Circuit For Factorial Calculation Using Ancient Vedic MathematicsDocument10 pagesASIC Design of A High Speed Low Power Circuit For Factorial Calculation Using Ancient Vedic MathematicsNeem PlantNo ratings yet
- Simulation of ZN Tuning Method-2319Document10 pagesSimulation of ZN Tuning Method-2319Rumana AliNo ratings yet
- Bespacker Paste Liquid Filling Machine User ManualDocument10 pagesBespacker Paste Liquid Filling Machine User ManualAhmad HamoudaNo ratings yet
- ISA Transactions: Rames C. Panda, V. Vijayan, V. Sujatha, P. Deepa, D. Manamali, A.B. MandalDocument9 pagesISA Transactions: Rames C. Panda, V. Vijayan, V. Sujatha, P. Deepa, D. Manamali, A.B. MandalAnonymous WkbmWCa8MNo ratings yet
- Volume 3 Issue 4 PDFDocument10 pagesVolume 3 Issue 4 PDFNyein Chan KyawNo ratings yet
- Control Assign 1 2023Document4 pagesControl Assign 1 2023upeksha erandiNo ratings yet
- Control Strategies For Dynamic Systems PDFDocument604 pagesControl Strategies For Dynamic Systems PDFMarcu Sorin100% (3)
- Kavita 0404Document3 pagesKavita 0404sunfacevelNo ratings yet
- Combined-Cycle Plant Simulation Toolbox For Power Plant SimulatorDocument13 pagesCombined-Cycle Plant Simulation Toolbox For Power Plant Simulatorsor_68mNo ratings yet
- Innovative Solutions VOL 3 NO 1 Paper 2Document24 pagesInnovative Solutions VOL 3 NO 1 Paper 2Fawziyyah AgboolaNo ratings yet
- 224 AbstractPaperFileIEOMDocument9 pages224 AbstractPaperFileIEOMAbdisa BirUKNo ratings yet
- Advanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesFrom EverandAdvanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Detection of Malicious Web Contents Using Machine and Deep Learning ApproachesDocument6 pagesDetection of Malicious Web Contents Using Machine and Deep Learning ApproachesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Study of Customer Experience and Uses of Uber Cab Services in MumbaiDocument12 pagesStudy of Customer Experience and Uses of Uber Cab Services in MumbaiInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- THE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSDocument7 pagesTHE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Analysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyDocument6 pagesAnalysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Staycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityDocument10 pagesStaycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Soil Stabilization of Road by Using Spent WashDocument7 pagesSoil Stabilization of Road by Using Spent WashInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Performance of Short Transmission Line Using Mathematical MethodDocument8 pagesPerformance of Short Transmission Line Using Mathematical MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDocument8 pagesDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)Document10 pagesA Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Mexican Innovation System: A System's Dynamics PerspectiveDocument12 pagesThe Mexican Innovation System: A System's Dynamics PerspectiveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Deep Learning Based Assistant For The Visually ImpairedDocument11 pagesA Deep Learning Based Assistant For The Visually ImpairedInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Swot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictDocument5 pagesSwot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Impact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryDocument8 pagesImpact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaDocument5 pagesThe Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Ijaiem 2021 01 28 6Document9 pagesIjaiem 2021 01 28 6International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationDocument13 pagesDesign and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Anchoring of Inflation Expectations and Monetary Policy Transparency in IndiaDocument9 pagesAnchoring of Inflation Expectations and Monetary Policy Transparency in IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Synthetic Datasets For Myocardial Infarction Based On Actual DatasetsDocument9 pagesSynthetic Datasets For Myocardial Infarction Based On Actual DatasetsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Quiz 1: Attempt HistoryDocument9 pagesQuiz 1: Attempt HistorylakshmisudarshanNo ratings yet
- Logic Expressions - CIE IGCSE Computer Science Revision Notes 2023 - Save My ExamsDocument1 pageLogic Expressions - CIE IGCSE Computer Science Revision Notes 2023 - Save My ExamsDarren GwendeNo ratings yet
- Basic Control TheoryDocument8 pagesBasic Control TheoryJuan Luis Merlo50% (2)
- 21MAT105 MIS-1 LAB PracticeSheet-5 (Eigenvalues Eigenvectors)Document2 pages21MAT105 MIS-1 LAB PracticeSheet-5 (Eigenvalues Eigenvectors)Dinesh SomisettyNo ratings yet
- MIT18 05S14 Class5slides PDFDocument17 pagesMIT18 05S14 Class5slides PDFAftab SaadNo ratings yet
- Auto MLDocument15 pagesAuto MLshreyans JainNo ratings yet
- Lecture 3.1.2 Traversing Binary Trees, TraversalDocument18 pagesLecture 3.1.2 Traversing Binary Trees, Traversalborab25865No ratings yet
- Lecture 20Document29 pagesLecture 20Axel Coronado PopperNo ratings yet
- EE321 Contemp Comm Tutorial2 2017Document3 pagesEE321 Contemp Comm Tutorial2 2017Shounak KulkarniNo ratings yet
- Neural Networks in Fabric EngineeringDocument18 pagesNeural Networks in Fabric EngineeringVigneshwaran SkNo ratings yet
- Gujarat Technological University: Type of Course: Core EngineeringDocument4 pagesGujarat Technological University: Type of Course: Core EngineeringBrijesh B NaikNo ratings yet
- Fitzgibbon AlgorithmDocument5 pagesFitzgibbon AlgorithmoctavinavarroNo ratings yet
- WaveletsDocument30 pagesWaveletsKshitij RachchhNo ratings yet
- Digital SignatureDocument22 pagesDigital SignatureDiptendu BasuNo ratings yet
- Using The FOR Construct Write Instructions For Each of The Following ProblemsDocument2 pagesUsing The FOR Construct Write Instructions For Each of The Following ProblemsYanique JonesNo ratings yet
- Voice RecogDocument25 pagesVoice RecogAnkita HatwarNo ratings yet
- Laplace TransformDocument5 pagesLaplace TransformjohnNo ratings yet
- Bisection in 1D, 2D, and 3DDocument7 pagesBisection in 1D, 2D, and 3DSukuje JeNo ratings yet
- FinalDocument603 pagesFinalMuhammad Sultan ShahidNo ratings yet
- Ecaade2022 399Document9 pagesEcaade2022 399johanesmikhaelNo ratings yet
- CSE 373 - Course Objective and Outcome Form - Sec 6,9Document3 pagesCSE 373 - Course Objective and Outcome Form - Sec 6,9Prince DebNo ratings yet
- Image Based Password AuthenticationDocument61 pagesImage Based Password AuthenticationA M Shahed HasanNo ratings yet
- 1 s2.0 S131915781730544X MainDocument7 pages1 s2.0 S131915781730544X Mainaman kumarNo ratings yet
- BA ZG523 Introduction To Data ScienceDocument12 pagesBA ZG523 Introduction To Data ScienceClitt Orise100% (1)
- Asymptotic NotationDocument20 pagesAsymptotic NotationAbhishek ChauhanNo ratings yet
- B - TreeDocument46 pagesB - TreeDevinder KumarNo ratings yet
- Sample - INDIVIDUAL - ASSIGNMENT-2-22 (ISP611)Document21 pagesSample - INDIVIDUAL - ASSIGNMENT-2-22 (ISP611)Wina RaithulNo ratings yet
- OpenFOAM Steady StateDocument3 pagesOpenFOAM Steady StateAli Hussain KadarNo ratings yet
- Daa2020 Tutorial 04Document2 pagesDaa2020 Tutorial 04KamalNo ratings yet
- Birla Institute of Technology and Science, Pilani Pilani Campus Instruction DivisionDocument2 pagesBirla Institute of Technology and Science, Pilani Pilani Campus Instruction Divisiontourist101No ratings yet












































































































International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 4, Issue 1, January 2015
ISSN 2319 - 4847
Mathematical Modeling of
Interacting and Non Interacting Tank System
Mr. Parvat. B.J.1, Mr. Deo.S.A.2 and Mr.KaduC.B.3
1
Professor, Department of Instrumentation and control P R E C, Loni, Maharashtra, India
ME student, Department of Instrumentation and control, P R E C, Loni, Maharashtra, India
3
HOD, Department of Instrumentation and control P R E C, Loni, Maharashtra, India
ABSTRACT
The main objective of this paper is to determine the mathematical model of a coupled tank system which will be useful for
designing and tuning controllers consisting of a PID and a fuzzy logic for the system. . In this paper, we adopt a two layer
quadruple tank system whose transfer function was obtained via mathematical modeling. The simulation is being carried out
using the Mat Lab/ Simulink Toolbox and the simulation results are compared with actual results performed during
experiment. Based on procedure of Mathematical modeling for tanks in single, non- interacting and interacting mode this
paper is an extensive comparative experimental study Liquid level controls. The system under investigation is a quadruple tank
system apparatus. [8] The basic control principle of the quadruple tank system is to maintain a constant level of the liquid in
the tank when there is an inflow and outflow of water in the tank.
Keywords: Interacting, Non- Interacting. Simulation, Quadruple Tank system.
1. INTRODUCTION
The first stage in the development of any control and monitoring system is the identification and modeling of the
system. The present work is concerned with developing Mathematical model for interacting and non interacting tank
process and comparing it with the real time experimental data. System identification from the experimental data plays a
vital role for model based controller design. Derivation of process model from first principles is often difficult due to its
complexity. [2]This paper presents a quadruple tank system is taken as a plant and will be modeled mathematically
using Bernoullis law, simulate with Mat lab / Simulink and decentralized using control and estimation tool manager
from Simulink model and mathematical model. This paper will help the method suitable for research findings
concerning on the coupled-tank liquid level control system.
2. MATHEMATICAL MODELING
A mathematical model is a description of a system using mathematical concepts and language. The process of
developing a mathematical model is termed mathematical modeling.[2] As far as process control systems are concerned
we need simple description of how process reacts to various inputs and this is what mathematical model can provide to
control designer. In this report mathematical modeling of single and coupled tank system (interacting and non
interacting mode) is developed using Quadruple Tank system. Multivariable level control trainer is designed for
teaching the basic level control principles and advanced study in complex systems for control engineering. It is a
combination of two double tank systems, usually also known as Quadruple Tank System. The setup consists of supply
water tank with two variable speed positive displacement pumps for water circulation, four transparent process tanks
fitted with level transmitters and flow dampers. The process signals from level transmitters are connected to Serial
based duel loop PID controller. The controller is connected to computer through USB port communication. The process
parameters are controlled through software and the output is fed to variable frequency drive used for the pumps. These
units along with necessary piping are fitted on standalone support structure. The set up is connected to computer
through USB port for monitoring and control by using PID logics. The product is supplied with 32 tag demo version
software package along with licensed version of 64 Tag SCADA software. The experimental set up and process
description is as given below
Volume 4, Issue 1, January 2015
Page 86
International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 4, Issue 1, January 2015
ISSN 2319 - 4847
Figure1 Experimental set up
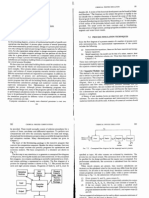
3.MODELING OF SINGLE TANK SYSTEM
[1] The overall material balance on the cylindrical tank is:
[Rate of accumulation of mass in system] = [Rate of mass entering system] [Rate of mass leaving system]
Since there is no heating effects, density can be assumed constant for water, ODE becomes,
Qout is determined by pressure exerted by liquid given by
Qout = K
Therefore mass balance equation is given by [7]
= (Qin
) /A
(3)
(4)
Figure 3 Simulink Diagram for Single Tank System
Volume 4, Issue 1, January 2015
Page 87
International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 4, Issue 1, January 2015
ISSN 2319 - 4847
Figure 4. Response of Single Tank System
Figure 5 Validation Graph for Single Tank System
4.MODELING OF NON INTERACTING TANK SYSTEM
Figure 6 Non Interacting tank system
In non-interacting tank system we have two tanks where the outflow from first tank feeds the second tank. We assume
the tanks have uniform cross sectional area and the flow resistance is linear. We can write mass balance equations as
Volume 4, Issue 1, January 2015
Page 88
International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 4, Issue 1, January 2015
ISSN 2319 - 4847
Figure 7 Simulink diagram for Non-Interacting Tank System
Figure 8 Simulation Response of Tank 1
Figure 9 Validation Graph for Tank 1 (Non-Interacting Tank System
Figure10 Simulation response for Tank 2
Volume 4, Issue 1, January 2015
Page 89
International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 4, Issue 1, January 2015
ISSN 2319 - 4847
Figure 11 Validation Graph for Tank 1 (Non-Interacting Tank System)
5.MODELING OF INTERACTING TANK SYSTEM
Figure 12 Interacting Tank System
The coupled tank system consists of two tank coupled with a manually operated bal l valve. The system is called
interacting since flow from Q1 depends on difference between h1 and h2.Mass balance equations for the system will be
[4]
the corresponding Simulink diagram is
Figure13 Simulink diagram for Interacting Tank System
Volume 4, Issue 1, January 2015
Page 90
International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 4, Issue 1, January 2015
ISSN 2319 - 4847
Figure14 Simulation response for both Tanks (Interacting)
Figure 15 Validation Graph for both Tanks (Interacting Tank System)
6. CONCLUSION
The coupled tank system model development presented in the paper is nothing but the representation of the system in
mathematical form. However, the complexity increases with increase in number of variables to be controlled.
Interacting two tank system is considered as non-linear system which will be helpful in designing Manual PID and the
simulation carried out using MATLAB will be helpful to ensure that controller perfectly regulates the desired output
level as per the requirement. The Mathematical modeling helps in furnishing a convenient and flexible design that
provides good performance in terms of disturbance rejection and set-point tracking. The values of parameters obtained
from physical model are substituted in the theoretical model and are validated and the results obtained are compared
with statistical method.
REFERENCES
[1] Bequette, B.W. (1991), Nonlinear Control of Chemical processes: A Review. Ind. Eng. Chem. Res., Vol. 30, pp.
1391-1413
[2] George Stephanopoulos (1990), Chemical Process Control, Prentice Hall of India Pvt Ltd, New Delhi
[3] Chidambaram M. (1998), Applied Process Control, Allied Publishers, India. Control Design Of A Coupled-Tank
Apparatus ByVanuvamalai Harishankar School Of Electrical And Electronic Engineering
[4] Design and Implementation of Sliding Mode Controller for Level Control Parvat B. J., Jadhav. V. K., Lokhande N.
N. ,IOSR Journal of Electronics and Communication Engineering (IOSR-JECE) ISSN : 2278-2834, ISBN : 22788735,PP:51-54www.iosrjournals.org
[5] Elke Laubwald., Coupled Tank System, Control System Principles.Co.uk 7] Analytical Design of State Feedback
Controllers for a Nonlinear Interacting Tank Process by S. Nagammai, S.Latha, I.Aarifa, S.D.Idhaya International
Journal of Engineering and Advanced Technology (IJEAISS 2249 8958, Volume-2, Issue-4, April 2013
[6] Modeling and Design of Controllers for Interacting Two Tank Hybrid System (ITTHS) by Y. Christy, D. Dinesh
Kumar International Journal of Engineering and Innovative Technology (IJEIT) Volume 3, Issue 7, January 2014
[7] http://eleceng.dit.ie
[8] Modeling And Controller Design for a Coupled tank Liquid Level System: Analysis & Comparison by Mohd
Fuaad Rahmat1 & Sahazati Md RozaLI2 Jurnal Teknologi, 48(D) Jun 2008: 113141 Universiti Teknologi
Malaysia
Volume 4, Issue 1, January 2015
Page 91
International Journal of Application or Innovation in Engineering & Management (IJAIEM)
Web Site: www.ijaiem.org Email: editor@ijaiem.org
Volume 4, Issue 1, January 2015
ISSN 2319 - 4847
AUTHOR
Mr.B.J.Parvat. received the B.E. and M.tech.degree in Instrumentation and Control from College
of Engineering Pune,now he is Associate Profesor and P.G.Coordinator at P.R.E.C.,loni,Ahmednagar
district,Maharashtra,India
Mr.Deo.S.A. received the B.E. degree in Instrumentation Engineering from Padmabhushan
Vasantdada Institute of Technology in 2000. He has experienceof more than 8 years in field of
education.Right now he is persuing his M.E. in field of Instrumentation and control at
PREC,Loni,Maharashtra,India.
Mr.Kadu.C.B. is Associate professor and HOD of Instrumentation and Control Department at
PREC, Loni, Maharashtra, and India.He is having experience of more than 15 years in education
field.
Volume 4, Issue 1, January 2015
Page 92
You might also like
- DEN5200 CONTROL SYSTEMS ANLAYSIS AND DESIGN ReportDocument15 pagesDEN5200 CONTROL SYSTEMS ANLAYSIS AND DESIGN Reportsilvia100% (1)
- Computer-Controlled Systems: Theory and Design, Third EditionFrom EverandComputer-Controlled Systems: Theory and Design, Third EditionRating: 3 out of 5 stars3/5 (4)
- Implementation of Fuzzy and PID Controller To Water Level System Using LabView PDFDocument5 pagesImplementation of Fuzzy and PID Controller To Water Level System Using LabView PDFFrances RaphaelNo ratings yet
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- System Identification and Modeling For Interacting and Non-Interacting Tank Systems Using Intelligent TechniquesDocument15 pagesSystem Identification and Modeling For Interacting and Non-Interacting Tank Systems Using Intelligent TechniquesMandy DiazNo ratings yet
- PID Controller Design For Two Tanks Liquid Level Control System Using MatlabDocument6 pagesPID Controller Design For Two Tanks Liquid Level Control System Using MatlabInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Study of Model Predictive Control Using Ni LabviewDocument10 pagesStudy of Model Predictive Control Using Ni LabviewBrankko Jhonathan Torres SaavedraNo ratings yet
- Chapter 2Document40 pagesChapter 2Halkawt G MuhammadNo ratings yet
- A Continuous Stirred Tank Heater Simulation Model With ApplicationsDocument14 pagesA Continuous Stirred Tank Heater Simulation Model With ApplicationsHao LuoNo ratings yet
- 07 - Chemical Process SimulationDocument16 pages07 - Chemical Process SimulationChatchan67% (3)
- Modeling Water Supply System Control System Algorithms: SciencedirectDocument10 pagesModeling Water Supply System Control System Algorithms: SciencedirectKheav KimlengNo ratings yet
- 2015-Adaptive Multi-Loop Fractional Order PID - USBDocument8 pages2015-Adaptive Multi-Loop Fractional Order PID - USBAravindan MohanNo ratings yet
- Modelling and Control of Coupled Tank Liquid Level System Using Backstepping Method IJERTV4IS060710Document5 pagesModelling and Control of Coupled Tank Liquid Level System Using Backstepping Method IJERTV4IS060710Juan Sebastian Hincapie MontesNo ratings yet
- UNIT-V 14.04.2020 4-5pmDocument13 pagesUNIT-V 14.04.2020 4-5pmVikas MishraNo ratings yet
- Process Control Laboratory Experiments Using Labview: Asession 3220Document15 pagesProcess Control Laboratory Experiments Using Labview: Asession 3220Ali AbdullahNo ratings yet
- Genetic Algorithm Techniques For Calibrating Network ModelsDocument44 pagesGenetic Algorithm Techniques For Calibrating Network ModelsAde YahyaNo ratings yet
- Introduction To Control Engineering Modeling, Analysis and Design - Ajit K. MandalDocument633 pagesIntroduction To Control Engineering Modeling, Analysis and Design - Ajit K. MandalClara Garrido PNo ratings yet
- Hydro Turbin - 3 PaperDocument19 pagesHydro Turbin - 3 PaperSyamsul Bahry HarahapNo ratings yet
- Analysis of Modelling Methods of Quadruple Tank SystemDocument15 pagesAnalysis of Modelling Methods of Quadruple Tank Systemcosmos35No ratings yet
- Icramid 52Document10 pagesIcramid 52SundaraPandiyanNo ratings yet
- Process-Oriented Analysis: Weber@produktion - Bepr.ethz - CHDocument6 pagesProcess-Oriented Analysis: Weber@produktion - Bepr.ethz - CHTegar EpheNo ratings yet
- Model Based Control of A Four-Tank SystemDocument6 pagesModel Based Control of A Four-Tank SystemJuan Manuel MauroNo ratings yet
- A Complete Mathematical Modeling, Simulation and Computational Implementation of Boost Converter Via MATLAB/SimulinkDocument15 pagesA Complete Mathematical Modeling, Simulation and Computational Implementation of Boost Converter Via MATLAB/SimulinkSado KubsaNo ratings yet
- A Complete Mathematical Modeling, SimulationDocument15 pagesA Complete Mathematical Modeling, Simulationosama1928No ratings yet
- Level Control (Tank 1) of Coupled Tank Liquid Level System Using Integral Control State Feedback ControllerDocument25 pagesLevel Control (Tank 1) of Coupled Tank Liquid Level System Using Integral Control State Feedback ControllerVolkan KaradedeNo ratings yet
- PHD Research Plannin2Document7 pagesPHD Research Plannin2CharlesNo ratings yet
- TUHH - Kreitz - Arriola - Virtual Performance Evaluation For Electro-Mechanical Actuators Considering Parameter UncertaintiesDocument7 pagesTUHH - Kreitz - Arriola - Virtual Performance Evaluation For Electro-Mechanical Actuators Considering Parameter Uncertaintiessvp3761No ratings yet
- Design of Embedded Microcontroller For Controlling and Monitoring Blood PumpDocument8 pagesDesign of Embedded Microcontroller For Controlling and Monitoring Blood PumpGEORGE MYLONASNo ratings yet
- Mechatronic Design Solution For Fuel Level Monitoring Using Pressure Sensor PDFDocument8 pagesMechatronic Design Solution For Fuel Level Monitoring Using Pressure Sensor PDFJohn Renz M. CleofasNo ratings yet
- Ijmer 46066571 PDFDocument7 pagesIjmer 46066571 PDFIJMERNo ratings yet
- PIContoller Researchand DesignDocument14 pagesPIContoller Researchand DesignRASCOR VADERNo ratings yet
- Pipelining PDFDocument19 pagesPipelining PDFriyazpashaNo ratings yet
- PLC Based Liquid Filling and Mixing-1227Document5 pagesPLC Based Liquid Filling and Mixing-1227Castellani SolisNo ratings yet
- 9 Challenges 2013Document9 pages9 Challenges 2013sajjad moradiNo ratings yet
- Jurnal Proses ManufakturDocument6 pagesJurnal Proses ManufakturNur RokhimNo ratings yet
- IEEE 6 Bus System in PSAT PaperDocument7 pagesIEEE 6 Bus System in PSAT PaperJulie OsborneNo ratings yet
- 1 s2.0 S0019057821001038 MainDocument17 pages1 s2.0 S0019057821001038 MainYassine El BarakyNo ratings yet
- MCT Lab ManualDocument75 pagesMCT Lab ManualManeeshNo ratings yet
- Identification of Longitudinal Aircraft Dynamics by Process Model Using Matlab/SimulinkDocument4 pagesIdentification of Longitudinal Aircraft Dynamics by Process Model Using Matlab/SimulinkEditor IJSETNo ratings yet
- Simulators For Risk AssessmentDocument20 pagesSimulators For Risk Assessmentajrojas1359100% (1)
- Integrating Measurement Instruments in Pneumatic Lab ActivitiesDocument9 pagesIntegrating Measurement Instruments in Pneumatic Lab ActivitiesMuftah AhmedNo ratings yet
- PSO Optimized PID Controller Design For The Process Liquid Level ControlDocument5 pagesPSO Optimized PID Controller Design For The Process Liquid Level ControlgadaNo ratings yet
- Comparing Pressure Flow Solvers For Dinamic SimulationDocument24 pagesComparing Pressure Flow Solvers For Dinamic SimulationEdgar HuancaNo ratings yet
- ASIC Design of A High Speed Low Power Circuit For Factorial Calculation Using Ancient Vedic MathematicsDocument10 pagesASIC Design of A High Speed Low Power Circuit For Factorial Calculation Using Ancient Vedic MathematicsNeem PlantNo ratings yet
- Simulation of ZN Tuning Method-2319Document10 pagesSimulation of ZN Tuning Method-2319Rumana AliNo ratings yet
- Bespacker Paste Liquid Filling Machine User ManualDocument10 pagesBespacker Paste Liquid Filling Machine User ManualAhmad HamoudaNo ratings yet
- ISA Transactions: Rames C. Panda, V. Vijayan, V. Sujatha, P. Deepa, D. Manamali, A.B. MandalDocument9 pagesISA Transactions: Rames C. Panda, V. Vijayan, V. Sujatha, P. Deepa, D. Manamali, A.B. MandalAnonymous WkbmWCa8MNo ratings yet
- Volume 3 Issue 4 PDFDocument10 pagesVolume 3 Issue 4 PDFNyein Chan KyawNo ratings yet
- Control Assign 1 2023Document4 pagesControl Assign 1 2023upeksha erandiNo ratings yet
- Control Strategies For Dynamic Systems PDFDocument604 pagesControl Strategies For Dynamic Systems PDFMarcu Sorin100% (3)
- Kavita 0404Document3 pagesKavita 0404sunfacevelNo ratings yet
- Combined-Cycle Plant Simulation Toolbox For Power Plant SimulatorDocument13 pagesCombined-Cycle Plant Simulation Toolbox For Power Plant Simulatorsor_68mNo ratings yet
- Innovative Solutions VOL 3 NO 1 Paper 2Document24 pagesInnovative Solutions VOL 3 NO 1 Paper 2Fawziyyah AgboolaNo ratings yet
- 224 AbstractPaperFileIEOMDocument9 pages224 AbstractPaperFileIEOMAbdisa BirUKNo ratings yet
- Advanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesFrom EverandAdvanced Dynamic-System Simulation: Model Replication and Monte Carlo StudiesNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Detection of Malicious Web Contents Using Machine and Deep Learning ApproachesDocument6 pagesDetection of Malicious Web Contents Using Machine and Deep Learning ApproachesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Study of Customer Experience and Uses of Uber Cab Services in MumbaiDocument12 pagesStudy of Customer Experience and Uses of Uber Cab Services in MumbaiInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewDocument9 pagesAn Importance and Advancement of QSAR Parameters in Modern Drug Design: A ReviewInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- THE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSDocument7 pagesTHE TOPOLOGICAL INDICES AND PHYSICAL PROPERTIES OF n-HEPTANE ISOMERSInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Analysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyDocument6 pagesAnalysis of Product Reliability Using Failure Mode Effect Critical Analysis (FMECA) - Case StudyInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Staycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityDocument10 pagesStaycation As A Marketing Tool For Survival Post Covid-19 in Five Star Hotels in Pune CityInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Soil Stabilization of Road by Using Spent WashDocument7 pagesSoil Stabilization of Road by Using Spent WashInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Performance of Short Transmission Line Using Mathematical MethodDocument8 pagesPerformance of Short Transmission Line Using Mathematical MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Detection of Fruits and Vegetable Spoiled Detetction SystemDocument8 pagesDesign and Detection of Fruits and Vegetable Spoiled Detetction SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)Document10 pagesA Comparative Analysis of Two Biggest Upi Paymentapps: Bhim and Google Pay (Tez)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Mexican Innovation System: A System's Dynamics PerspectiveDocument12 pagesThe Mexican Innovation System: A System's Dynamics PerspectiveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Deep Learning Based Assistant For The Visually ImpairedDocument11 pagesA Deep Learning Based Assistant For The Visually ImpairedInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Swot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictDocument5 pagesSwot Analysis of Backwater Tourism With Special Reference To Alappuzha DistrictInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Impact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryDocument8 pagesImpact of Covid-19 On Employment Opportunities For Fresh Graduates in Hospitality &tourism IndustryInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaDocument5 pagesThe Effect of Work Involvement and Work Stress On Employee Performance: A Case Study of Forged Wheel Plant, IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Ijaiem 2021 01 28 6Document9 pagesIjaiem 2021 01 28 6International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Design and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationDocument13 pagesDesign and Manufacturing of 6V 120ah Battery Container Mould For Train Lighting ApplicationInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Anchoring of Inflation Expectations and Monetary Policy Transparency in IndiaDocument9 pagesAnchoring of Inflation Expectations and Monetary Policy Transparency in IndiaInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Synthetic Datasets For Myocardial Infarction Based On Actual DatasetsDocument9 pagesSynthetic Datasets For Myocardial Infarction Based On Actual DatasetsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Quiz 1: Attempt HistoryDocument9 pagesQuiz 1: Attempt HistorylakshmisudarshanNo ratings yet
- Logic Expressions - CIE IGCSE Computer Science Revision Notes 2023 - Save My ExamsDocument1 pageLogic Expressions - CIE IGCSE Computer Science Revision Notes 2023 - Save My ExamsDarren GwendeNo ratings yet
- Basic Control TheoryDocument8 pagesBasic Control TheoryJuan Luis Merlo50% (2)
- 21MAT105 MIS-1 LAB PracticeSheet-5 (Eigenvalues Eigenvectors)Document2 pages21MAT105 MIS-1 LAB PracticeSheet-5 (Eigenvalues Eigenvectors)Dinesh SomisettyNo ratings yet
- MIT18 05S14 Class5slides PDFDocument17 pagesMIT18 05S14 Class5slides PDFAftab SaadNo ratings yet
- Auto MLDocument15 pagesAuto MLshreyans JainNo ratings yet
- Lecture 3.1.2 Traversing Binary Trees, TraversalDocument18 pagesLecture 3.1.2 Traversing Binary Trees, Traversalborab25865No ratings yet
- Lecture 20Document29 pagesLecture 20Axel Coronado PopperNo ratings yet
- EE321 Contemp Comm Tutorial2 2017Document3 pagesEE321 Contemp Comm Tutorial2 2017Shounak KulkarniNo ratings yet
- Neural Networks in Fabric EngineeringDocument18 pagesNeural Networks in Fabric EngineeringVigneshwaran SkNo ratings yet
- Gujarat Technological University: Type of Course: Core EngineeringDocument4 pagesGujarat Technological University: Type of Course: Core EngineeringBrijesh B NaikNo ratings yet
- Fitzgibbon AlgorithmDocument5 pagesFitzgibbon AlgorithmoctavinavarroNo ratings yet
- WaveletsDocument30 pagesWaveletsKshitij RachchhNo ratings yet
- Digital SignatureDocument22 pagesDigital SignatureDiptendu BasuNo ratings yet
- Using The FOR Construct Write Instructions For Each of The Following ProblemsDocument2 pagesUsing The FOR Construct Write Instructions For Each of The Following ProblemsYanique JonesNo ratings yet
- Voice RecogDocument25 pagesVoice RecogAnkita HatwarNo ratings yet
- Laplace TransformDocument5 pagesLaplace TransformjohnNo ratings yet
- Bisection in 1D, 2D, and 3DDocument7 pagesBisection in 1D, 2D, and 3DSukuje JeNo ratings yet
- FinalDocument603 pagesFinalMuhammad Sultan ShahidNo ratings yet
- Ecaade2022 399Document9 pagesEcaade2022 399johanesmikhaelNo ratings yet
- CSE 373 - Course Objective and Outcome Form - Sec 6,9Document3 pagesCSE 373 - Course Objective and Outcome Form - Sec 6,9Prince DebNo ratings yet
- Image Based Password AuthenticationDocument61 pagesImage Based Password AuthenticationA M Shahed HasanNo ratings yet
- 1 s2.0 S131915781730544X MainDocument7 pages1 s2.0 S131915781730544X Mainaman kumarNo ratings yet
- BA ZG523 Introduction To Data ScienceDocument12 pagesBA ZG523 Introduction To Data ScienceClitt Orise100% (1)
- Asymptotic NotationDocument20 pagesAsymptotic NotationAbhishek ChauhanNo ratings yet
- B - TreeDocument46 pagesB - TreeDevinder KumarNo ratings yet
- Sample - INDIVIDUAL - ASSIGNMENT-2-22 (ISP611)Document21 pagesSample - INDIVIDUAL - ASSIGNMENT-2-22 (ISP611)Wina RaithulNo ratings yet
- OpenFOAM Steady StateDocument3 pagesOpenFOAM Steady StateAli Hussain KadarNo ratings yet
- Daa2020 Tutorial 04Document2 pagesDaa2020 Tutorial 04KamalNo ratings yet
- Birla Institute of Technology and Science, Pilani Pilani Campus Instruction DivisionDocument2 pagesBirla Institute of Technology and Science, Pilani Pilani Campus Instruction Divisiontourist101No ratings yet