Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- A Study On Squatter Settlements of Kathmandu Using GIS, Aerial Photography, Remote Sensing and Household SurveyDocument8 pagesA Study On Squatter Settlements of Kathmandu Using GIS, Aerial Photography, Remote Sensing and Household SurveyMamata SubediNo ratings yet
- AsiaDocument6 pagesAsiabloodroses347No ratings yet
- 8.1 Raging River Front Sheet 2012Document1 page8.1 Raging River Front Sheet 2012Simon PeterNo ratings yet
- HMDA Plots For Sale in PatancheruDocument2 pagesHMDA Plots For Sale in PatancheruPrakash GroupNo ratings yet
- DCS Project Report Stage 1Document22 pagesDCS Project Report Stage 1Tushar PatilNo ratings yet
- Malina 2020Document10 pagesMalina 2020Jaime VZNo ratings yet
- Independence Day Special SupplementDocument1 pageIndependence Day Special SupplementMuna KhanNo ratings yet
- Geotechnical Works of The Hong Kong-Zhuhai-Macao Bridge ProjectDocument13 pagesGeotechnical Works of The Hong Kong-Zhuhai-Macao Bridge ProjectMELANNIE NOTHINGNo ratings yet
- Winter Contingency Plan CharsaddaDocument11 pagesWinter Contingency Plan CharsaddaUsman JilaniNo ratings yet
- Membranes 12 00792 v4Document14 pagesMembranes 12 00792 v4OMAR EL OUAZZANIANo ratings yet
- Assessment of Infiltration Rate Under Different Drylands Types in Unter-Iwes Subdistrict Sumbawa Besar, Indonesia PDFDocument7 pagesAssessment of Infiltration Rate Under Different Drylands Types in Unter-Iwes Subdistrict Sumbawa Besar, Indonesia PDFAlexander DeckerNo ratings yet
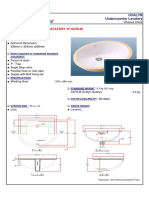
- Ovalyn Undercounter Lavatory Vf-0470Lm: Vitreous ChinaDocument1 pageOvalyn Undercounter Lavatory Vf-0470Lm: Vitreous ChinaMohammed BasheeruddinNo ratings yet
- Method Statement For Approval of Layer Thickness - Rev.01Document9 pagesMethod Statement For Approval of Layer Thickness - Rev.01Jox Biol100% (1)
- Science 9 - Module 2 - Version 3Document10 pagesScience 9 - Module 2 - Version 3Chee MaRieNo ratings yet
- 9 3Document1 page9 3JaneNo ratings yet
- Application of Ecobrick As A Garden Hardscape Material: EcobricksDocument4 pagesApplication of Ecobrick As A Garden Hardscape Material: EcobricksTessya Raulia MeiraniNo ratings yet
- VICTOR Final Yr Project Final FinalDocument82 pagesVICTOR Final Yr Project Final FinalVic OkoroNo ratings yet
- Literature Review of Lower Benue TroughDocument6 pagesLiterature Review of Lower Benue Troughfvgcaatd100% (1)
- Multiple Meter Cabinet DetailsDocument1 pageMultiple Meter Cabinet DetailsMohammed sabatinNo ratings yet
- BGC Construction Surveillance Checklist: Activity Description Results Accepted Yes NoDocument1 pageBGC Construction Surveillance Checklist: Activity Description Results Accepted Yes NoAhmedNo ratings yet
- Dorney Road Landfill Superfund Site Five-Year ReviewDocument57 pagesDorney Road Landfill Superfund Site Five-Year ReviewAnonymous arnc2g2NNo ratings yet
- Custer Gallatin National Forest Announces End To The 3 District-Wide ClosureDocument1 pageCuster Gallatin National Forest Announces End To The 3 District-Wide ClosureNBC MontanaNo ratings yet
- Drilling Manual V2.0Document25 pagesDrilling Manual V2.0Michael KazindaNo ratings yet
- Ataye H.performance ReviewDocument13 pagesAtaye H.performance Reviewyomi deguNo ratings yet
- Safety Data Sheet Cydal + Alcohol FreeDocument5 pagesSafety Data Sheet Cydal + Alcohol FreeBawah BumiNo ratings yet
- A New Approach To The Design of Intermittent Water Supply NetworksDocument11 pagesA New Approach To The Design of Intermittent Water Supply NetworksAbhishek Kumar SinhaNo ratings yet
- GrihaDocument28 pagesGrihabuildtech narenNo ratings yet
- Ecomix GBDocument16 pagesEcomix GBvinod patilNo ratings yet
- Product-Sheet Filter NTF DIGITALDocument2 pagesProduct-Sheet Filter NTF DIGITALNduong NguyenNo ratings yet
- Silt Control in Irrigation ChannelsDocument36 pagesSilt Control in Irrigation ChannelsHuzaifa Iftikhar100% (1)