Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Machine Learning Engineer Interview QuestionsDocument2 pagesMachine Learning Engineer Interview QuestionsANKIT MITTALNo ratings yet
- Or Project - NerbdDocument4 pagesOr Project - NerbdFazal Shaikh0% (1)
- Sample Minor Project ReportDocument30 pagesSample Minor Project ReportAzhar SofiNo ratings yet
- Aeee 2013Document14 pagesAeee 2013Thien MaiNo ratings yet
- A Fast Iterative Reconstruction Algorithm For Sparse Angle CT Based On Compressed SensingDocument6 pagesA Fast Iterative Reconstruction Algorithm For Sparse Angle CT Based On Compressed Sensingfrima kurniawanNo ratings yet
- DSP - Unit 4 - DecimationDocument14 pagesDSP - Unit 4 - DecimationNaganarasaiah GoudNo ratings yet
- Karthik Chintada IISc-ResumeDocument1 pageKarthik Chintada IISc-ResumeAditya Arun kumarNo ratings yet
- Answer All Questions: 4 Semester - B.E. / B.Tech Second Internal Assessment: 28-02-13Document1 pageAnswer All Questions: 4 Semester - B.E. / B.Tech Second Internal Assessment: 28-02-13BIBIN CHIDAMBARANATHANNo ratings yet
- CS ASS2 (13-17batch)Document3 pagesCS ASS2 (13-17batch)Anonymous yO7rcec6vuNo ratings yet
- Hidden Markov ModelDocument32 pagesHidden Markov ModelAnubhab BanerjeeNo ratings yet
- Mis 6324 Group 9 Term Paper ReportDocument38 pagesMis 6324 Group 9 Term Paper Reportapi-165783868No ratings yet
- Levinson and Durbin AlgorithmDocument4 pagesLevinson and Durbin AlgorithmPrathmesh P SakhadeoNo ratings yet
- UNIT I: Concept LearningDocument22 pagesUNIT I: Concept LearningSarmi HarshaNo ratings yet
- Derivation of The IMM Filter: K K K 1 K K K K K K KDocument6 pagesDerivation of The IMM Filter: K K K 1 K K K K K K Ksüleyman fatih KaraNo ratings yet
- FEA 2016 v11 Release NoteDocument12 pagesFEA 2016 v11 Release NoteKlLeeNo ratings yet
- Project 1Document5 pagesProject 1asfNo ratings yet
- Medical Disease Prediction Using Machine Learning AlgorithmsDocument10 pagesMedical Disease Prediction Using Machine Learning AlgorithmsIJRASETPublicationsNo ratings yet
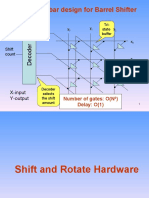
- NXN Crossbar Design For Barrel Shifter: X-Input Y-OutputDocument18 pagesNXN Crossbar Design For Barrel Shifter: X-Input Y-Outputhamza abbasNo ratings yet
- Perceptron PDFDocument8 pagesPerceptron PDFVel Ayutham0% (1)
- Chapter 1-4Document135 pagesChapter 1-4WONDYE DESTANo ratings yet
- Question Paper - CIMDocument2 pagesQuestion Paper - CIMHariNo ratings yet
- Keyphrase Extraction Using Word EmbeddingDocument8 pagesKeyphrase Extraction Using Word Embeddingroberto86100% (1)
- Application of Hilbert-Huang Transform in Structural Health Monitoring A State-of-the-Art ReviewDocument23 pagesApplication of Hilbert-Huang Transform in Structural Health Monitoring A State-of-the-Art ReviewGabriel Cifuentes RosenkranzNo ratings yet
- Emotion Detection of Autistic Children Using Support Vector Machine: A ReviewDocument4 pagesEmotion Detection of Autistic Children Using Support Vector Machine: A ReviewAnonymous izrFWiQ100% (2)
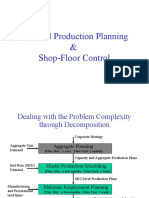
- Detailed Production Planning & Shop-Floor ControlDocument41 pagesDetailed Production Planning & Shop-Floor ControlRoya AlikhaniNo ratings yet
- Probability & Application in BusinessDocument17 pagesProbability & Application in BusinessShiny Staar100% (1)
- Barbara Dunin-Keplicz, Edward Nawarecki-From Theory To Practice in Multi-Agent SystemsDocument345 pagesBarbara Dunin-Keplicz, Edward Nawarecki-From Theory To Practice in Multi-Agent SystemsDetectiv PrivatNo ratings yet
- Appendix G Self-Test Solutions and Answers To Even-Numbered ProblemsDocument3 pagesAppendix G Self-Test Solutions and Answers To Even-Numbered ProblemsLusa NguyễnNo ratings yet
- Input Filter MagicDocument54 pagesInput Filter MagicSergio Omar OrlandoNo ratings yet
- TR 631 LT 2.4 Mode Choice ModellingDocument67 pagesTR 631 LT 2.4 Mode Choice ModellingGilbert MaroNo ratings yet