Download as pdf or txt
You might also like
- Directorio Agroindustrial TotalDocument4 pagesDirectorio Agroindustrial TotalGian Carlos Perea Diaz100% (1)
- Kugle - Modelling and Control of A Ball-Balancing RobotDocument290 pagesKugle - Modelling and Control of A Ball-Balancing RobotmindthomasNo ratings yet
- Application Guidelines For Turbine AgitatorsDocument6 pagesApplication Guidelines For Turbine AgitatorsGian Carlos Perea DiazNo ratings yet
- Math Quest Further Maths VCE 12 (2016 Edition)Document786 pagesMath Quest Further Maths VCE 12 (2016 Edition)NhiNo ratings yet
- Magnetic Equivalent Circuit ModelingDocument12 pagesMagnetic Equivalent Circuit ModelingJavad Rahmany FardNo ratings yet
- CFD Ducted Propeller Validation - CaldasDocument5 pagesCFD Ducted Propeller Validation - CaldasalexNo ratings yet
- Ying 2011 A PDFDocument6 pagesYing 2011 A PDFAngel CerriteñoNo ratings yet
- CFD Simulation of Flows in Stirred Tank Reactors Through Prediction of Momentum SourceDocument20 pagesCFD Simulation of Flows in Stirred Tank Reactors Through Prediction of Momentum SourceSachin AngirishNo ratings yet
- Icee2015 Paper Id363Document5 pagesIcee2015 Paper Id363Zellagui EnergyNo ratings yet
- 08 Georgiev 45 50 PDFDocument6 pages08 Georgiev 45 50 PDFKuldeep28883No ratings yet
- Accurate Computation of Wave Loads On A Bottom Fixed Circular CylinderDocument4 pagesAccurate Computation of Wave Loads On A Bottom Fixed Circular CylinderTrần Văn CườngNo ratings yet
- Inductance Leakage CalculationDocument6 pagesInductance Leakage Calculationnuswanggono1994No ratings yet
- TR CFD 02 15Document19 pagesTR CFD 02 15Zende Kiran ChandrakantNo ratings yet
- CFDDocument10 pagesCFDThiam Chun Ong100% (1)
- Characterisation of The Unsteady Flow in The Nacelle Region of A Modern Wind TurbineDocument13 pagesCharacterisation of The Unsteady Flow in The Nacelle Region of A Modern Wind Turbinepierre_elouanNo ratings yet
- 2015 - Calibration of An Air Entrainment Model For CFD Spillway ApplicationsDocument12 pages2015 - Calibration of An Air Entrainment Model For CFD Spillway ApplicationsYen Kun HoNo ratings yet
- Non Circular JetDocument25 pagesNon Circular JetAshraf IntesaafNo ratings yet
- Numerical Simulation of Turbulent Flow Through A Francis Turbine RunnerDocument6 pagesNumerical Simulation of Turbulent Flow Through A Francis Turbine RunnerAngel CerriteñoNo ratings yet
- Ijmet 06 10 001Document9 pagesIjmet 06 10 001IAEME PublicationNo ratings yet
- COBEM2017 Donatelli CarmoDocument8 pagesCOBEM2017 Donatelli CarmoBruno Souza CarmoNo ratings yet
- Visualization Monitoring of Cavitation in Water TurbinesDocument10 pagesVisualization Monitoring of Cavitation in Water TurbinesslamienkaNo ratings yet
- Design HPklystronsDocument9 pagesDesign HPklystronsrajarpitNo ratings yet
- 1986-Beris AN - FEM Caluclation For Journal Bearing-Mod EccDocument25 pages1986-Beris AN - FEM Caluclation For Journal Bearing-Mod EccAlex CooperNo ratings yet
- DLM PaperDocument16 pagesDLM PaperVenkata TummalaNo ratings yet
- On Mobility Load Balancing For LTE SystemsDocument5 pagesOn Mobility Load Balancing For LTE SystemsurfriendlyjoeNo ratings yet
- Iahr 2006 2Document15 pagesIahr 2006 2Pixing ZuoNo ratings yet
- Indecs2020 pp389 399Document11 pagesIndecs2020 pp389 399Dániel TokodyNo ratings yet
- Calculation of Intercavity Coupling Coefficient ForDocument3 pagesCalculation of Intercavity Coupling Coefficient ForNima SalianiNo ratings yet
- Analysis and Design Criteria For Fractional Unbalanced Windings of Three-Phase MotorsDocument5 pagesAnalysis and Design Criteria For Fractional Unbalanced Windings of Three-Phase MotorsantonmboxNo ratings yet
- Multi Plane Balancing of A Rotating Machine Using Run-Down DataDocument6 pagesMulti Plane Balancing of A Rotating Machine Using Run-Down Datapeach5No ratings yet
- N4 Fortran Codes For Computing The Space-Time Correlations of Turbulent Flow in A ChannelDocument47 pagesN4 Fortran Codes For Computing The Space-Time Correlations of Turbulent Flow in A Channelabhi71127112No ratings yet
- Important ThroughflowDocument14 pagesImportant ThroughflowkoolwaveoceanicNo ratings yet
- High Speed Vessel RuddersDocument12 pagesHigh Speed Vessel RuddersbiondavNo ratings yet
- Calculation of Metzner Constant For Double Helical Ribbon Impeller by Computational Fluid Dynamic MethodDocument7 pagesCalculation of Metzner Constant For Double Helical Ribbon Impeller by Computational Fluid Dynamic MethodUğur AydemirNo ratings yet
- A Parametric Design of Compact Exhaust Manifold Junction in Heavy Duty Diesel Engine Using Computational Fluid Dynamics CodesDocument11 pagesA Parametric Design of Compact Exhaust Manifold Junction in Heavy Duty Diesel Engine Using Computational Fluid Dynamics CodesAndres GonzalezNo ratings yet
- Mesh ShipDocument7 pagesMesh ShipPranshu MalikNo ratings yet
- 7 An Algebraic Approach To The Targeting of Mass Exchange NetworksDocument10 pages7 An Algebraic Approach To The Targeting of Mass Exchange Networkskim haksongNo ratings yet
- Instrument For Real-Time Measurements of Airgap Flux Distribution of On-Load Synchronous GeneratorsDocument4 pagesInstrument For Real-Time Measurements of Airgap Flux Distribution of On-Load Synchronous GeneratorsGanti KameshNo ratings yet
- A Comparative Study On The Flow Over An Airfoil Using Transitional Turbulence ModelsDocument6 pagesA Comparative Study On The Flow Over An Airfoil Using Transitional Turbulence ModelsMalik NaweratNo ratings yet
- Aiaa 2011 573 500Document17 pagesAiaa 2011 573 500Rajeev Raj'sNo ratings yet
- ICAS2022 0630 PaperDocument7 pagesICAS2022 0630 PaperRahul jwsNo ratings yet
- Flow SepertionDocument11 pagesFlow SepertionPraveen P JoseNo ratings yet
- Static Airfoil WebsiteDocument8 pagesStatic Airfoil Websitefelip987No ratings yet
- Manuscript With FiguresDocument15 pagesManuscript With FiguresPiyush DubeyNo ratings yet
- Aerodynamics of A Multi-Element Airfoil Near Ground: LL LL LLDocument6 pagesAerodynamics of A Multi-Element Airfoil Near Ground: LL LL LLVimal ChandNo ratings yet
- Norwegian HydrofoilsDocument44 pagesNorwegian HydrofoilsncharalaNo ratings yet
- 1999-Lausanne StroblDocument9 pages1999-Lausanne StroblMiten ThakkarNo ratings yet
- Xiicleee RBP 1754revDocument6 pagesXiicleee RBP 1754revrbargallo0No ratings yet
- Estimating The Number of Modes in Multimode Waveguide Propagation EnvironmentDocument4 pagesEstimating The Number of Modes in Multimode Waveguide Propagation EnvironmentyomatotyNo ratings yet
- Robust Model-Based Fault Diagnosis For Unmanned Underwater Vehicles Using Sliding Mode-ObserversDocument8 pagesRobust Model-Based Fault Diagnosis For Unmanned Underwater Vehicles Using Sliding Mode-Observersbnousaid2014No ratings yet
- Design of Dual Mode SIW Filter PDFDocument4 pagesDesign of Dual Mode SIW Filter PDFalagu17No ratings yet
- Retiming Theory and PracticeDocument21 pagesRetiming Theory and PracticeRobert slashNo ratings yet
- Wind Turbine Rotor-Tower Interaction Using An Incompressible Overset Grid MethodDocument21 pagesWind Turbine Rotor-Tower Interaction Using An Incompressible Overset Grid MethodFrederik ZahleNo ratings yet
- Numerical Analysis of Wells Turbine For Wave Power ConversionDocument6 pagesNumerical Analysis of Wells Turbine For Wave Power ConversionJulio Yataco VivasNo ratings yet
- Trash RackDocument9 pagesTrash RackAhsan LatifNo ratings yet
- Antenna and EM Modeling With MATLABDocument21 pagesAntenna and EM Modeling With MATLABNatasha SearsNo ratings yet
- Analysis of Flow Across Tube Banks in Low Reynolds Number RegionDocument6 pagesAnalysis of Flow Across Tube Banks in Low Reynolds Number Regionsugandaraj522No ratings yet
- De Glon 2006Document10 pagesDe Glon 2006ragaNo ratings yet
- Fulltext PDFDocument15 pagesFulltext PDFAbhijeeth NagarajNo ratings yet
- Airflow Over An Ahmed Body: Created in COMSOL Multiphysics 5.4Document28 pagesAirflow Over An Ahmed Body: Created in COMSOL Multiphysics 5.4Eren ÖzataNo ratings yet
- Application of Engineering Models To Predict Wake Deflection Due To A Tilted Wind TurbineDocument6 pagesApplication of Engineering Models To Predict Wake Deflection Due To A Tilted Wind TurbineSrinivas GunturNo ratings yet
- Reviews in Computational Chemistry, Volume 31From EverandReviews in Computational Chemistry, Volume 31Abby L. ParrillNo ratings yet
- The Wave Concept in Electromagnetism and Circuits: Theory and ApplicationsFrom EverandThe Wave Concept in Electromagnetism and Circuits: Theory and ApplicationsNo ratings yet
- (Heat and Mass Transfer) Karl Sommer (Auth.), Henning Bockhorn, Dieter Mewes, Wolfgang Peukert, Hans-Joachim Warnecke (Eds.)-Micro and Macro Mixing_ Analysis, Simulation and Numerical Calculation-SpriDocument345 pages(Heat and Mass Transfer) Karl Sommer (Auth.), Henning Bockhorn, Dieter Mewes, Wolfgang Peukert, Hans-Joachim Warnecke (Eds.)-Micro and Macro Mixing_ Analysis, Simulation and Numerical Calculation-SpriGian Carlos Perea DiazNo ratings yet
- (Sugar Series 1) Edward Delden (Eds.) - Standard Fabrication Practices For Cane Sugar Mills-Academic Press, Elsevier (1981)Document247 pages(Sugar Series 1) Edward Delden (Eds.) - Standard Fabrication Practices For Cane Sugar Mills-Academic Press, Elsevier (1981)Gian Carlos Perea Diaz100% (3)
- Selecting The Right Speed Reducer For Mixers PDFDocument12 pagesSelecting The Right Speed Reducer For Mixers PDFGian Carlos Perea DiazNo ratings yet
- Movidrive MD - 60A Drive Inverters: UL ULDocument38 pagesMovidrive MD - 60A Drive Inverters: UL ULGian Carlos Perea DiazNo ratings yet
- 2.2. Inductor Volt-Second Balance, Capacitor Charge Balance, and The Small Ripple ApproximationDocument11 pages2.2. Inductor Volt-Second Balance, Capacitor Charge Balance, and The Small Ripple ApproximationGian Carlos Perea DiazNo ratings yet
- Lenze Motor 87hzDocument2 pagesLenze Motor 87hzGian Carlos Perea DiazNo ratings yet
- Thickening BasicsDocument24 pagesThickening BasicsGustavNo ratings yet
- Brain TeasersDocument43 pagesBrain TeasersCindy BartolayNo ratings yet
- Ingco Product List July 2020Document25 pagesIngco Product List July 2020anil_24_007No ratings yet
- Dbms Lab File FormatDocument11 pagesDbms Lab File Formatshagunverma039No ratings yet
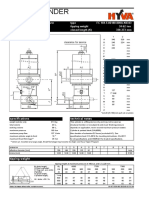
- Hyva CylinderDocument2 pagesHyva CylinderDinifaanNo ratings yet
- ImageScan HD User Manual Rev ADocument52 pagesImageScan HD User Manual Rev AmrscribdNo ratings yet
- Diffunderint Leibniz Rule and IntegralsDocument28 pagesDiffunderint Leibniz Rule and Integralsab cNo ratings yet
- GR 100G DWDM STDGRDocument139 pagesGR 100G DWDM STDGRThomas IsoaNo ratings yet
- ECS Kennedy by Aerovator Aviation ExportDocument34 pagesECS Kennedy by Aerovator Aviation ExportOfficial KillerNo ratings yet
- Experiment No.03: Mathematical Modeling of Physical System: ObjectiveDocument5 pagesExperiment No.03: Mathematical Modeling of Physical System: ObjectiveSao SavathNo ratings yet
- The Growth Acceleration of Microorganism in Yoghurt by The Extract of AsparagusDocument30 pagesThe Growth Acceleration of Microorganism in Yoghurt by The Extract of AsparagusAvel ChandNo ratings yet
- Lecture-2 Unit ConsistencyDocument37 pagesLecture-2 Unit ConsistencyHashir FurhanNo ratings yet
- Order Ranking Qs Eng OliveboardDocument20 pagesOrder Ranking Qs Eng Oliveboardmohanrajk879No ratings yet
- Rei Vol IiDocument142 pagesRei Vol IiDineshNo ratings yet
- GNU Sed Cheat Sheet: CommandsDocument2 pagesGNU Sed Cheat Sheet: CommandsRonaldMartinezNo ratings yet
- IOPS CalculatorDocument4 pagesIOPS CalculatorVictor BitarNo ratings yet
- Artificial Skin For Sweating Guarded Hotplates and Manikins Based On Weft Knitted FabricsDocument16 pagesArtificial Skin For Sweating Guarded Hotplates and Manikins Based On Weft Knitted FabricsAndrej DjurasicNo ratings yet
- Distillation PostLabDocument2 pagesDistillation PostLabBrys SyNo ratings yet
- (2091) Lecture Notes Electrochemistry E.pdf - TMPDocument43 pages(2091) Lecture Notes Electrochemistry E.pdf - TMPRamJiPandeyNo ratings yet
- CDM833 Parts BookDocument163 pagesCDM833 Parts BookThiago Fredy33% (3)
- ECM ProcessDocument15 pagesECM ProcessSandro DomeneghettiNo ratings yet
- TIA PRO1 07 ProgBlocksDocument24 pagesTIA PRO1 07 ProgBlocksEmilio MonterichelNo ratings yet
- Development of Instrumental and Sensory Analytical Methods of Food Obtained by Traditional and Emerging TechnologiesDocument163 pagesDevelopment of Instrumental and Sensory Analytical Methods of Food Obtained by Traditional and Emerging TechnologiescarloarchivioNo ratings yet
- Arista Precision Data Analysis With DANZ WhitePaperDocument11 pagesArista Precision Data Analysis With DANZ WhitePaperZekNo ratings yet
- First Conference On Foundations of Information Science: From Computers and Quantum Physics To Cells, Nervous Systems, and SocietiesDocument10 pagesFirst Conference On Foundations of Information Science: From Computers and Quantum Physics To Cells, Nervous Systems, and Societiessepot24093No ratings yet
- Aisi 1040 Carbon Steel (Uns g10400)Document3 pagesAisi 1040 Carbon Steel (Uns g10400)anishraobNo ratings yet
- Integrity Management With S-RBI: Using The w-IMS ToolDocument28 pagesIntegrity Management With S-RBI: Using The w-IMS ToolHari ShNo ratings yet
- Engineering Mechanics: StaticsDocument45 pagesEngineering Mechanics: StaticsDaya AhmadNo ratings yet
- Tube Fittings: Size From 1/16" Thru 2" (2mm Thru 50mm)Document5 pagesTube Fittings: Size From 1/16" Thru 2" (2mm Thru 50mm)Jit BNo ratings yet