Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- List of Books 2023-24Document10 pagesList of Books 2023-24Moiz ahmedNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Hw2sol PDFDocument5 pagesHw2sol PDFelenaNo ratings yet
- Lesson Plan My Lovely ToysDocument4 pagesLesson Plan My Lovely ToysDana ZamfirNo ratings yet
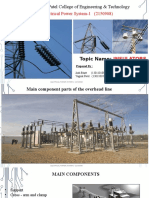
- G H Patel College of Engineering & Technology: Electrical Power System-1 (2150908)Document21 pagesG H Patel College of Engineering & Technology: Electrical Power System-1 (2150908)Chintan PatelNo ratings yet
- Gujarat Technological UniversityDocument1 pageGujarat Technological UniversityChintan PatelNo ratings yet
- EEE - 13-14 (Compatibility Mode)Document11 pagesEEE - 13-14 (Compatibility Mode)Chintan PatelNo ratings yet
- Important Formula's From EfficiencyDocument2 pagesImportant Formula's From EfficiencyChintan PatelNo ratings yet
- Ch-5 Preventive, Emergency & Restorative Control PDFDocument35 pagesCh-5 Preventive, Emergency & Restorative Control PDFChintan PatelNo ratings yet
- CONSTELLATIONDocument4 pagesCONSTELLATIONLanz Tyrone SantosNo ratings yet
- Enrique C. Paderes Provincial Agrarian Reform Program Officer Ii Dar, Provincial OfficeDocument3 pagesEnrique C. Paderes Provincial Agrarian Reform Program Officer Ii Dar, Provincial OfficeDaniel Fancis Amabran BarrientosNo ratings yet
- Pollen and SporaDocument2 pagesPollen and SporaVerry Edi SetiawanNo ratings yet
- Fayol's Principles of ManagementDocument26 pagesFayol's Principles of Managementsomya chaturvedi100% (3)
- Fh0009en01 FH9 A4Document2 pagesFh0009en01 FH9 A4Marcelo SánchezNo ratings yet
- Autodesk Revit Architecture Workflow Fundamentals and New FeaturesDocument34 pagesAutodesk Revit Architecture Workflow Fundamentals and New FeaturesWandersonNo ratings yet
- Wheelen Smbp12 PPT 06Document33 pagesWheelen Smbp12 PPT 06syed_murshedNo ratings yet
- Psycometric AssessmentDocument10 pagesPsycometric AssessmentDr. Karan M PaiNo ratings yet
- Developing Attitude, Love and Value of Art Education at The Secondary StageDocument2 pagesDeveloping Attitude, Love and Value of Art Education at The Secondary StageIJELS Research JournalNo ratings yet
- Fundamentals of Supply Chain ManagementDocument16 pagesFundamentals of Supply Chain Managementamirq450% (4)
- Poetics: Kees Van Reesa,, Gillis J. DorleijnbDocument18 pagesPoetics: Kees Van Reesa,, Gillis J. DorleijnbGeert_VDMNo ratings yet
- My Imp ResearchDocument28 pagesMy Imp ResearchAtul Kumar AgrawalNo ratings yet
- Podcast StoryboardDocument2 pagesPodcast Storyboardapi-488700354No ratings yet
- Caratula Proyecto Final - CGT. Docx FINALDocument2 pagesCaratula Proyecto Final - CGT. Docx FINALJhon JC Chullo TintaNo ratings yet
- Daylight Saving Time ScriptDocument1 pageDaylight Saving Time ScriptLorenzoNo ratings yet
- BAE 94117 - A10035C Quality ProvisionsDocument18 pagesBAE 94117 - A10035C Quality Provisionsorlomont100% (1)
- Jackson 5 16 Homework SolutionDocument4 pagesJackson 5 16 Homework SolutionHind Abu GhazlehNo ratings yet
- Guide To Return in Supply Chain ManagementDocument27 pagesGuide To Return in Supply Chain ManagementMark Louie Santos RabaNo ratings yet
- Multimedia Presentation RubricsDocument3 pagesMultimedia Presentation RubricsAdon GwapoNo ratings yet
- NPP User Manual (Notepad ++)Document22 pagesNPP User Manual (Notepad ++)some0% (1)
- Active Passive VoiceDocument6 pagesActive Passive VoiceDina ValdezNo ratings yet
- Angelika Spinardi PRJCT 2018/19Document13 pagesAngelika Spinardi PRJCT 2018/19Angelika SpinardiNo ratings yet
- E-AI-002 - 320 Aspirating Smoke DetectorDocument2 pagesE-AI-002 - 320 Aspirating Smoke DetectorNestorNo ratings yet
- Bayesian Linear Regression in Data Mining: K.Sathyanarayana Sharma, Dr.S.RajagopalDocument3 pagesBayesian Linear Regression in Data Mining: K.Sathyanarayana Sharma, Dr.S.RajagopalerpublicationNo ratings yet
- Unit Iii: Tapping The Power of Excel ObjectivesDocument10 pagesUnit Iii: Tapping The Power of Excel ObjectivesPauline Bogador MayordomoNo ratings yet
- ...Document6 pages...Mishia EstradaNo ratings yet
- The Language and Communication of Helen KelerDocument16 pagesThe Language and Communication of Helen KelerAdam DamanhuriNo ratings yet