Download as pdf or txt
You might also like
- Tutorial On Helmholtz MachineDocument26 pagesTutorial On Helmholtz MachineNon SenseNo ratings yet
- SD-M1 TSI Chapitre 4Document42 pagesSD-M1 TSI Chapitre 4Felix Chokwe Danra TaissalaNo ratings yet
- Spline Power PointDocument52 pagesSpline Power PointShahad AlgazaaNo ratings yet
- A Robust Real Time Face DetectionDocument55 pagesA Robust Real Time Face DetectionGaurav Veer SinghNo ratings yet
- CG Ex6Document53 pagesCG Ex6Yasir ButtNo ratings yet
- Kernel Methods in Machine LearningDocument50 pagesKernel Methods in Machine Learningvennela gudimellaNo ratings yet
- 2021 UNAS REFER Rafi Yon Saputra 173112706420242 Kernel PrimerDocument65 pages2021 UNAS REFER Rafi Yon Saputra 173112706420242 Kernel PrimerRafi Y.SNo ratings yet
- Introduction To Kernels: Max WellingDocument16 pagesIntroduction To Kernels: Max WellingKamesh ReddiNo ratings yet
- Lecture 11 Dimensionality ReductionDocument32 pagesLecture 11 Dimensionality ReductionLIU HengxuNo ratings yet
- Quantum Mechanics B SPA6413 Problemset 1Document1 pageQuantum Mechanics B SPA6413 Problemset 1Shams KhanNo ratings yet
- Statistical Machine Learning-The Basic Approach and Current Research ChallengesDocument35 pagesStatistical Machine Learning-The Basic Approach and Current Research Challengesnikhilesh kumarNo ratings yet
- Part 4: Conditional Random Fields: Sebastian Nowozin and Christoph H. LampertDocument39 pagesPart 4: Conditional Random Fields: Sebastian Nowozin and Christoph H. LampertTgjeonNo ratings yet
- Image Segmentation and Classification: Professor Michael Brady Frs Freng Hilary Term 2005Document26 pagesImage Segmentation and Classification: Professor Michael Brady Frs Freng Hilary Term 2005Najiah AfifahNo ratings yet
- Large Scale Deep LearningDocument170 pagesLarge Scale Deep Learningpavancreative81No ratings yet
- Heinonen J. - Geometric Embeddings of Metric Spaces-Draft (2003)Document44 pagesHeinonen J. - Geometric Embeddings of Metric Spaces-Draft (2003)gaboelgaNo ratings yet
- Banach Space-JSBDocument20 pagesBanach Space-JSBdasari manikantaNo ratings yet
- Digital Image ProcessingDocument33 pagesDigital Image Processingapi-19658682No ratings yet
- Towards The Cauchy Problem For TheDocument18 pagesTowards The Cauchy Problem For Theashraf shalghoumNo ratings yet
- GradinetDocument51 pagesGradinetnabin PaudelNo ratings yet
- AI201 Unit5B KnowledgeRepresentation Techniques-2Document50 pagesAI201 Unit5B KnowledgeRepresentation Techniques-2angilazmy77No ratings yet
- Neural Networks Tirgul W10 Moodle PDFDocument167 pagesNeural Networks Tirgul W10 Moodle PDFTzur LeviNo ratings yet
- Convex Optimization For Machine LearningDocument110 pagesConvex Optimization For Machine LearningratnadeepbimtacNo ratings yet
- Lecture Static 04 - 014 PDFDocument12 pagesLecture Static 04 - 014 PDFAshoka VanjareNo ratings yet
- Mal 641 - 19042019Document170 pagesMal 641 - 19042019kashif ali shahNo ratings yet
- Opt2017 Part1Document48 pagesOpt2017 Part1Co londota2No ratings yet
- P-Adic Discrete Dynamical Systems and TheirDocument33 pagesP-Adic Discrete Dynamical Systems and TheirdmtriNo ratings yet
- Linear Functional Analysis: Lecture 1: Introduction Rynne and Youngson 1.1, 1.2Document9 pagesLinear Functional Analysis: Lecture 1: Introduction Rynne and Youngson 1.1, 1.2MRNo ratings yet
- Lecture 1Document48 pagesLecture 1GauravNo ratings yet
- Lecture 1Document42 pagesLecture 1Vivi EnneNo ratings yet
- Recursion TheoryDocument125 pagesRecursion Theoryttnleeobh7382No ratings yet
- CAIM: Cerca I Anàlisi D'informació Massiva: FIB, Grau en Enginyeria InformàticaDocument19 pagesCAIM: Cerca I Anàlisi D'informació Massiva: FIB, Grau en Enginyeria InformàticaBlackMoothNo ratings yet
- 06a.kernel MethodsDocument70 pages06a.kernel MethodsYASH PATILNo ratings yet
- The Process of Modeling Then Solving A Real Life Problem.: Example: Transportation, Allocation, ManagementDocument9 pagesThe Process of Modeling Then Solving A Real Life Problem.: Example: Transportation, Allocation, ManagementAli MzayhemNo ratings yet
- On The Eigenvalue of $P (X) $-Laplace Equation: ArticleDocument37 pagesOn The Eigenvalue of $P (X) $-Laplace Equation: ArticleVasi UtaNo ratings yet
- Large-Scale Machine Learning: K-NN, Perceptron: Mining of Massive Datasets Jure Leskovec, Anand Rajaraman, Jeff UllmanDocument33 pagesLarge-Scale Machine Learning: K-NN, Perceptron: Mining of Massive Datasets Jure Leskovec, Anand Rajaraman, Jeff Ullman陳大明No ratings yet
- Class 01Document75 pagesClass 01Habib MradNo ratings yet
- Gonzalez 2020Document79 pagesGonzalez 2020hu jackNo ratings yet
- Vector-Valued Reproducing Kernel Hilbert Spaces: With Applications To Function Extension and Image ColorizationDocument71 pagesVector-Valued Reproducing Kernel Hilbert Spaces: With Applications To Function Extension and Image ColorizationLê Phạm TuyênNo ratings yet
- Statistical Machine Learning-The Basic Approach and Current Research ChallengesDocument35 pagesStatistical Machine Learning-The Basic Approach and Current Research ChallengesD'reef Newton 'dududpersonz'No ratings yet
- Hyperbolic Functions (Trigonometry) Mathematics E-Book For Public ExamsFrom EverandHyperbolic Functions (Trigonometry) Mathematics E-Book For Public ExamsNo ratings yet
- Nonlinear Observer Design For Smooth SystemsDocument13 pagesNonlinear Observer Design For Smooth Systemsoussama sadkiNo ratings yet
- First Order LogicDocument51 pagesFirst Order Logicthe city of lightNo ratings yet
- Neural Networks - KernelsDocument51 pagesNeural Networks - KernelsMarco PaolelliNo ratings yet
- Chapter 7. Complete Metric Spaces and Function SpacesDocument8 pagesChapter 7. Complete Metric Spaces and Function SpacesJuan David TorresNo ratings yet
- Optimal Solving of A Binary Knapsack Problem On D-Wave Quantum MachineDocument11 pagesOptimal Solving of A Binary Knapsack Problem On D-Wave Quantum MachineTomek SNo ratings yet
- ADocument3 pagesARolandNo ratings yet
- Mathematical Programming: Is Called The Feasible Set andDocument12 pagesMathematical Programming: Is Called The Feasible Set andOscar Hernandez CozatlNo ratings yet
- 12 MetricDocument10 pages12 MetricDanish ChNo ratings yet
- Paper 1 J. Adv. Math. Stud 2013Document9 pagesPaper 1 J. Adv. Math. Stud 2013amnakalsoombuttNo ratings yet
- KPCADocument26 pagesKPCAParmida AfsharNo ratings yet
- Image Processing: Introduction & FundamentalsDocument58 pagesImage Processing: Introduction & Fundamentalssingup2201No ratings yet
- Gonzalez 2021Document67 pagesGonzalez 2021Harrison FreyNo ratings yet
- Edgar Osuna Robert Freund Federico Girosi Center For Biological and Computational Learning and Operations Research Center Massachusetts Institute of Technology Cambridge, MA, 02139, U.S.ADocument8 pagesEdgar Osuna Robert Freund Federico Girosi Center For Biological and Computational Learning and Operations Research Center Massachusetts Institute of Technology Cambridge, MA, 02139, U.S.ARanaBilalShahidNo ratings yet
- Unsolved Problems - Mathematics Edition: August 2020Document28 pagesUnsolved Problems - Mathematics Edition: August 2020Nixon LagrisolaNo ratings yet
- The Structure of ImagesDocument8 pagesThe Structure of ImagesAnonymous tsTtieMHDNo ratings yet
- Optimal Recovery of Operator Sequences: V. F. Babenko, N. V. Parfinovych, D. S. Skorokhodov October 19, 2021Document21 pagesOptimal Recovery of Operator Sequences: V. F. Babenko, N. V. Parfinovych, D. S. Skorokhodov October 19, 2021Bart MaxNo ratings yet
- Li2016 PDFDocument12 pagesLi2016 PDFAnonymous l2fASkJbzkNo ratings yet
- Limit Theorem For The Hit Time of Mappings of A Circle With BreakDocument7 pagesLimit Theorem For The Hit Time of Mappings of A Circle With BreakResearch ParkNo ratings yet
- اختبار الوزن النوعي و امتصاص الماء لركامDocument78 pagesاختبار الوزن النوعي و امتصاص الماء لركامحسين المهندسNo ratings yet
- 1390388459576-Own Request Transfer FormatDocument3 pages1390388459576-Own Request Transfer FormatAkhilesh BhuraNo ratings yet
- Comparative Study of Soil Structure Interaction Analysis of Building On Clayey and Sandy Soil-IJRASETDocument11 pagesComparative Study of Soil Structure Interaction Analysis of Building On Clayey and Sandy Soil-IJRASETIJRASETPublicationsNo ratings yet
- GSPI-QA of Teaching Staff-Draft3Document43 pagesGSPI-QA of Teaching Staff-Draft3Tempus WebsitesNo ratings yet
- Calcium HypochloriteDocument260 pagesCalcium HypochloriteWidya Pradipta100% (1)
- Nokia: Management of SmesDocument32 pagesNokia: Management of SmesSimone SantosNo ratings yet
- An Innovative Method To Increase The Resolution of Optical EncodersDocument6 pagesAn Innovative Method To Increase The Resolution of Optical EncodersFuadMuzaki09No ratings yet
- Discussion Questions Activity NoDocument2 pagesDiscussion Questions Activity NoAngilene Lacson CabinianNo ratings yet
- Strand A Ilp Lesson PlanDocument3 pagesStrand A Ilp Lesson PlanyoNo ratings yet
- Chapter Outline For FTSDocument1 pageChapter Outline For FTSBalvinder SinghNo ratings yet
- CE230207 Copia WC Presentation FINALDocument47 pagesCE230207 Copia WC Presentation FINALIdir MahroucheNo ratings yet
- Ib Phys DC ESQ ADocument30 pagesIb Phys DC ESQ AkjsaccsNo ratings yet
- Impromptu SpeechDocument25 pagesImpromptu SpeechJerome Bulaun100% (1)
- Free Bitcoin MethodDocument7 pagesFree Bitcoin MethodOkoye VictorNo ratings yet
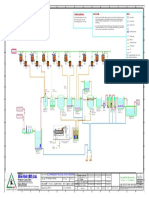
- Alim Knit (BD) LTD.: Recommended Process Flow DiagramDocument1 pageAlim Knit (BD) LTD.: Recommended Process Flow DiagramKamrul HasanNo ratings yet
- Vietnam Reward Trends 2015-2016.mercer - TalentnetDocument50 pagesVietnam Reward Trends 2015-2016.mercer - TalentnetTran TamNo ratings yet
- Nasa Design On Jet PumpsDocument44 pagesNasa Design On Jet PumpsJason BakerNo ratings yet
- 26812a Manual WEG PDFDocument83 pages26812a Manual WEG PDFPeterson GonçalvesNo ratings yet
- Cable Sizing CWPH PDFDocument21 pagesCable Sizing CWPH PDFsouheil boussaidNo ratings yet
- Chemical Engineering Plant Economics Questions and AnswersDocument32 pagesChemical Engineering Plant Economics Questions and AnswersLily Antonette Agustin100% (1)
- Sist TS Cen TS 17091 2018Document11 pagesSist TS Cen TS 17091 2018سعد خضر الياسNo ratings yet
- Essay Outline - Flaws in Our Education System Are Causing Some of Our Failures PDFDocument3 pagesEssay Outline - Flaws in Our Education System Are Causing Some of Our Failures PDFToufiq IbrahimNo ratings yet
- Dvp-Es2 Ss2 Sa2 Sx2-Program o en 20110302Document609 pagesDvp-Es2 Ss2 Sa2 Sx2-Program o en 20110302puskyboyNo ratings yet
- Gass Et Al v. Schlotfeldt Et Al - Document No. 4Document2 pagesGass Et Al v. Schlotfeldt Et Al - Document No. 4Justia.comNo ratings yet
- Classification of Common Musical InstrumentsDocument3 pagesClassification of Common Musical InstrumentsFabian FebianoNo ratings yet
- PoonamDocument54 pagesPoonamCH Rajan GujjarNo ratings yet
- TCL022150e Theory Past Paper 2019 May A - Grade 3Document8 pagesTCL022150e Theory Past Paper 2019 May A - Grade 3Andrea Price100% (1)
- Bill Sahli - Mind Becomes MassDocument76 pagesBill Sahli - Mind Becomes MassIvan TaranovNo ratings yet
- Research Methods For Commerce Lab Practical File "BRM Lab" BBA (M1) - BBA 213Document67 pagesResearch Methods For Commerce Lab Practical File "BRM Lab" BBA (M1) - BBA 213Mankeerat Singh ChannaNo ratings yet