
Aiaa 2009 4140 PDF
Aiaa 2009 4140 PDF
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- D31E 20 - Sn42001and Up PDFDocument671 pagesD31E 20 - Sn42001and Up PDFZay Nuri100% (2)
- Aace 96r-18 LLTT SampleDocument7 pagesAace 96r-18 LLTT Samplejose pablo riveraNo ratings yet
- Different Approaches For Solving Location ProblemsDocument30 pagesDifferent Approaches For Solving Location ProblemsAbhishek PadhyeNo ratings yet
- Civil Bill of QuantitiesDocument49 pagesCivil Bill of QuantitiesSudu Banda100% (1)
- TS GL 03 S 0034 - EN - 2020 12 - Standard For DrawingsDocument5 pagesTS GL 03 S 0034 - EN - 2020 12 - Standard For DrawingsGonzalo MazaNo ratings yet
- Standard WorkDocument43 pagesStandard WorkGiovanni Moreno VillamilNo ratings yet
- Lovejoy CouplingDocument13 pagesLovejoy Couplingsandulupeni100% (1)
- SMR As of Nov. 23, 2022Document35 pagesSMR As of Nov. 23, 2022Francis DedumoNo ratings yet
- Chapter 8: Facility and Work DesignDocument11 pagesChapter 8: Facility and Work DesignPaulo BernasNo ratings yet
- Wood Group Mustang Magazine Spring 2012Document48 pagesWood Group Mustang Magazine Spring 2012Kyaw Kyaw AungNo ratings yet
- Advances in Drilling: Drill Bit InnovationsDocument96 pagesAdvances in Drilling: Drill Bit InnovationsshaonaaNo ratings yet
- ZR300X100X 5 K S355 - 1124241B - 120M - ArvediDocument2 pagesZR300X100X 5 K S355 - 1124241B - 120M - Arvedimcmrr69No ratings yet
- Types of DRG Required For A ProjectDocument16 pagesTypes of DRG Required For A ProjectavseqNo ratings yet
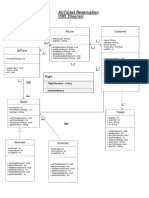
- Airticket Reservation Uml Diagram: FlightDocument1 pageAirticket Reservation Uml Diagram: Flightsalman mughalNo ratings yet
- Feedmill of The FutureDocument14 pagesFeedmill of The FutureMilling and Grain magazineNo ratings yet
- Construction Logbook Sheet San Jose (MARASIGAN POULTRY)Document162 pagesConstruction Logbook Sheet San Jose (MARASIGAN POULTRY)Czari MuñozNo ratings yet
- Sky Lift Hardware - Solar PanelsDocument4 pagesSky Lift Hardware - Solar PanelsSky Lift HardwareNo ratings yet
- FAG VibracijeDocument44 pagesFAG VibracijeTalicni TomNo ratings yet
- A90055-5 Frequently Asked Questions - 2017 Edition of CSA Z245.11, 12 and 15 Standard Compliance - A6C3A7Document2 pagesA90055-5 Frequently Asked Questions - 2017 Edition of CSA Z245.11, 12 and 15 Standard Compliance - A6C3A7Luis Barrios ArandaNo ratings yet
- Strenx 700MC D e 2017-04-20Document2 pagesStrenx 700MC D e 2017-04-20Amandeep SinghNo ratings yet
- Specification and Design of A CRM System For Smes: Inderjit Singh MSC Information Systems 2002-2003Document117 pagesSpecification and Design of A CRM System For Smes: Inderjit Singh MSC Information Systems 2002-2003Ranjith MohanNo ratings yet
- Fuji Frontier p1 Start Up Kit 600012445Document3 pagesFuji Frontier p1 Start Up Kit 600012445Bursa Foto StudioNo ratings yet
- Boeing 787: US's Dreamliner or Nightmare-Liner? Who Will Ultimately Win The Aerospace Race: US, Europe, China, or Russia?Document57 pagesBoeing 787: US's Dreamliner or Nightmare-Liner? Who Will Ultimately Win The Aerospace Race: US, Europe, China, or Russia?France HoudardNo ratings yet
- 5s ProgramDocument36 pages5s Programmrsmech84No ratings yet
- Pages From MEP Piping Material Specification - SKEC Comment-3Document2 pagesPages From MEP Piping Material Specification - SKEC Comment-3o ramu2No ratings yet
- Contact Adresses: Great Britain Germany Croatia, Slovakia, Slovenia, Czech Rep. Belgium and LuxembourgDocument1 pageContact Adresses: Great Britain Germany Croatia, Slovakia, Slovenia, Czech Rep. Belgium and LuxembourgAutor AutorNo ratings yet
- Presentation On Bajaj Auto LTDDocument20 pagesPresentation On Bajaj Auto LTDSrinivas R. KhodeNo ratings yet
- Production Planning and ControlDocument12 pagesProduction Planning and Controlsai mohanNo ratings yet
- Number of Questions 23 Number of Questions To Answer 20Document4 pagesNumber of Questions 23 Number of Questions To Answer 20Engr. Zahid Ur RehmanNo ratings yet
- The TOWS Matrix - A Tool For Situational AnalysisDocument19 pagesThe TOWS Matrix - A Tool For Situational Analysismr.avdheshsharma100% (6)






































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- D31E 20 - Sn42001and Up PDFDocument671 pagesD31E 20 - Sn42001and Up PDFZay Nuri100% (2)
- Aace 96r-18 LLTT SampleDocument7 pagesAace 96r-18 LLTT Samplejose pablo riveraNo ratings yet
- Different Approaches For Solving Location ProblemsDocument30 pagesDifferent Approaches For Solving Location ProblemsAbhishek PadhyeNo ratings yet
- Civil Bill of QuantitiesDocument49 pagesCivil Bill of QuantitiesSudu Banda100% (1)
- TS GL 03 S 0034 - EN - 2020 12 - Standard For DrawingsDocument5 pagesTS GL 03 S 0034 - EN - 2020 12 - Standard For DrawingsGonzalo MazaNo ratings yet
- Standard WorkDocument43 pagesStandard WorkGiovanni Moreno VillamilNo ratings yet
- Lovejoy CouplingDocument13 pagesLovejoy Couplingsandulupeni100% (1)
- SMR As of Nov. 23, 2022Document35 pagesSMR As of Nov. 23, 2022Francis DedumoNo ratings yet
- Chapter 8: Facility and Work DesignDocument11 pagesChapter 8: Facility and Work DesignPaulo BernasNo ratings yet
- Wood Group Mustang Magazine Spring 2012Document48 pagesWood Group Mustang Magazine Spring 2012Kyaw Kyaw AungNo ratings yet
- Advances in Drilling: Drill Bit InnovationsDocument96 pagesAdvances in Drilling: Drill Bit InnovationsshaonaaNo ratings yet
- ZR300X100X 5 K S355 - 1124241B - 120M - ArvediDocument2 pagesZR300X100X 5 K S355 - 1124241B - 120M - Arvedimcmrr69No ratings yet
- Types of DRG Required For A ProjectDocument16 pagesTypes of DRG Required For A ProjectavseqNo ratings yet
- Airticket Reservation Uml Diagram: FlightDocument1 pageAirticket Reservation Uml Diagram: Flightsalman mughalNo ratings yet
- Feedmill of The FutureDocument14 pagesFeedmill of The FutureMilling and Grain magazineNo ratings yet
- Construction Logbook Sheet San Jose (MARASIGAN POULTRY)Document162 pagesConstruction Logbook Sheet San Jose (MARASIGAN POULTRY)Czari MuñozNo ratings yet
- Sky Lift Hardware - Solar PanelsDocument4 pagesSky Lift Hardware - Solar PanelsSky Lift HardwareNo ratings yet
- FAG VibracijeDocument44 pagesFAG VibracijeTalicni TomNo ratings yet
- A90055-5 Frequently Asked Questions - 2017 Edition of CSA Z245.11, 12 and 15 Standard Compliance - A6C3A7Document2 pagesA90055-5 Frequently Asked Questions - 2017 Edition of CSA Z245.11, 12 and 15 Standard Compliance - A6C3A7Luis Barrios ArandaNo ratings yet
- Strenx 700MC D e 2017-04-20Document2 pagesStrenx 700MC D e 2017-04-20Amandeep SinghNo ratings yet
- Specification and Design of A CRM System For Smes: Inderjit Singh MSC Information Systems 2002-2003Document117 pagesSpecification and Design of A CRM System For Smes: Inderjit Singh MSC Information Systems 2002-2003Ranjith MohanNo ratings yet
- Fuji Frontier p1 Start Up Kit 600012445Document3 pagesFuji Frontier p1 Start Up Kit 600012445Bursa Foto StudioNo ratings yet
- Boeing 787: US's Dreamliner or Nightmare-Liner? Who Will Ultimately Win The Aerospace Race: US, Europe, China, or Russia?Document57 pagesBoeing 787: US's Dreamliner or Nightmare-Liner? Who Will Ultimately Win The Aerospace Race: US, Europe, China, or Russia?France HoudardNo ratings yet
- 5s ProgramDocument36 pages5s Programmrsmech84No ratings yet
- Pages From MEP Piping Material Specification - SKEC Comment-3Document2 pagesPages From MEP Piping Material Specification - SKEC Comment-3o ramu2No ratings yet
- Contact Adresses: Great Britain Germany Croatia, Slovakia, Slovenia, Czech Rep. Belgium and LuxembourgDocument1 pageContact Adresses: Great Britain Germany Croatia, Slovakia, Slovenia, Czech Rep. Belgium and LuxembourgAutor AutorNo ratings yet
- Presentation On Bajaj Auto LTDDocument20 pagesPresentation On Bajaj Auto LTDSrinivas R. KhodeNo ratings yet
- Production Planning and ControlDocument12 pagesProduction Planning and Controlsai mohanNo ratings yet
- Number of Questions 23 Number of Questions To Answer 20Document4 pagesNumber of Questions 23 Number of Questions To Answer 20Engr. Zahid Ur RehmanNo ratings yet
- The TOWS Matrix - A Tool For Situational AnalysisDocument19 pagesThe TOWS Matrix - A Tool For Situational Analysismr.avdheshsharma100% (6)