Download as pdf or txt
You might also like
- Manitoba OSCE Book PDFDocument267 pagesManitoba OSCE Book PDFVlad75% (4)
- Gas Analysis - SECTION6 Interpreting GasDocument10 pagesGas Analysis - SECTION6 Interpreting GasMotorola M Motorola100% (8)
- Tutorial 2 - Systems (Exercises)Document3 pagesTutorial 2 - Systems (Exercises)LEIDYDANNYTSNo ratings yet
- Chapter 3: Linear Time-Invariant Systems 3.1 MotivationDocument23 pagesChapter 3: Linear Time-Invariant Systems 3.1 Motivationsanjayb1976gmailcomNo ratings yet
- Linear Time-Invariant SystemsDocument30 pagesLinear Time-Invariant SystemsJoseph IbrahimNo ratings yet
- Lecture 1Document47 pagesLecture 1oswardNo ratings yet
- Convolution and Correlation 10Document1 pageConvolution and Correlation 10Harshali WavreNo ratings yet
- Chapter TwoDocument22 pagesChapter TwoWami MahammadNo ratings yet
- Signals and Systems 01Document10 pagesSignals and Systems 01nvbondNo ratings yet
- Chapter 2 AgaDocument22 pagesChapter 2 AgaNina AmeduNo ratings yet
- HW3 SolnDocument12 pagesHW3 SolnDanny MejíaNo ratings yet
- Continuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument24 pagesContinuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinIr Wn IkaarinaNo ratings yet
- Signal and SystemDocument15 pagesSignal and Systemswap_k007100% (1)
- Time-Continous Stochastic Processes 0. Time Continous Stochastic ProcessesDocument10 pagesTime-Continous Stochastic Processes 0. Time Continous Stochastic ProcessesHuy DuNo ratings yet
- Signals and Systems Unit 2: Mit-WpuDocument31 pagesSignals and Systems Unit 2: Mit-WpuZaheen KhanNo ratings yet
- Approximation of Continuous Time Systems With Discrete Time SystemsDocument13 pagesApproximation of Continuous Time Systems With Discrete Time SystemsRalu DamianNo ratings yet
- Properties of Linear, Time-Invariant (LTI) Systems: EGR 320: Signals & Systems Lecture 6: Feb. 7, 2011Document8 pagesProperties of Linear, Time-Invariant (LTI) Systems: EGR 320: Signals & Systems Lecture 6: Feb. 7, 2011MYNAMENo ratings yet
- Topic 4 Convolution IntegralDocument5 pagesTopic 4 Convolution IntegralRona SharmaNo ratings yet
- Q.1 List Various Type of Systems and Define Them Giving ExampleDocument6 pagesQ.1 List Various Type of Systems and Define Them Giving ExampleAbhishekNo ratings yet
- Chapter 2Document20 pagesChapter 2Fahad AbdullahNo ratings yet
- Lecture 8: Convolution: Continuous Time SystemDocument3 pagesLecture 8: Convolution: Continuous Time SystemVijay V RaoNo ratings yet
- Transmission of A Signals Through Linear SystemsDocument12 pagesTransmission of A Signals Through Linear SystemsRamoni WafaNo ratings yet
- 5 - HJBDocument12 pages5 - HJBBogdan ManeaNo ratings yet
- MIT6 003S10 Lec04 PDFDocument62 pagesMIT6 003S10 Lec04 PDFThắng PyNo ratings yet
- Signals and Systems 02Document8 pagesSignals and Systems 02SamNo ratings yet
- Ece2610 Chap9Document24 pagesEce2610 Chap9Bayar JargalNo ratings yet
- MAE546 Lecture 3Document15 pagesMAE546 Lecture 3Shivan BiradarNo ratings yet
- Signals & SystemsDocument55 pagesSignals & SystemsWaqas Akram GondalNo ratings yet
- The Convolution Integral: D T H X T H T X T yDocument39 pagesThe Convolution Integral: D T H X T H T X T yshahriaraustNo ratings yet
- Systems NotesDocument15 pagesSystems NotesSuhaimi SulaimanNo ratings yet
- Eee2035F Exam Signals and Systems I: University of Cape Town Department of Electrical EngineeringDocument3 pagesEee2035F Exam Signals and Systems I: University of Cape Town Department of Electrical EngineeringRubia IftikharNo ratings yet
- State Space Description of A Dynamic System: 1. Linear CaseDocument8 pagesState Space Description of A Dynamic System: 1. Linear CaseAnonymous N2c1CpNo ratings yet
- Continuous-Time Signals and SystemsDocument37 pagesContinuous-Time Signals and SystemsAbeer HaddadNo ratings yet
- Sas SeriesDocument8 pagesSas SerieskganesharunNo ratings yet
- Continuous-Time Signals: David W. Graham EE 327Document18 pagesContinuous-Time Signals: David W. Graham EE 327Waqas Akram GondalNo ratings yet
- Exc 05 ConvolutionDocument3 pagesExc 05 ConvolutionNoe Adiel Ponce MorenoNo ratings yet
- Linear Systems ReviewDocument14 pagesLinear Systems Reviewمحمد أشرف حسنNo ratings yet
- Fourier TransformDocument21 pagesFourier TransformPrudvi RajNo ratings yet
- Signals and Systems Using Matlab Chapter 1 - Continuous-Time SignalsDocument21 pagesSignals and Systems Using Matlab Chapter 1 - Continuous-Time SignalsDiluNo ratings yet
- CT ConvolutionDocument20 pagesCT ConvolutionahmdNo ratings yet
- ELCE301 Lecture5 (LTIsystems Time2)Document31 pagesELCE301 Lecture5 (LTIsystems Time2)Little VoiceNo ratings yet
- Recursive Least Squares: T y T X T X T X TDocument5 pagesRecursive Least Squares: T y T X T X T X Tsein777No ratings yet
- Topic 5 System Properties and Convolution SumDocument5 pagesTopic 5 System Properties and Convolution SumRona SharmaNo ratings yet
- LECTURE 4 Sytetms ClassificationDocument42 pagesLECTURE 4 Sytetms ClassificationEzzadin AbdowahabNo ratings yet
- Sigsys Lec 3 CH 3aDocument27 pagesSigsys Lec 3 CH 3aRutu ThakkarNo ratings yet
- Ch2 Fundamentals 2013Document16 pagesCh2 Fundamentals 2013Mark MaoNo ratings yet
- Worksheet I 2022Document3 pagesWorksheet I 2022Wami MahammadNo ratings yet
- Controllability and Observability For A Class of Time-Varying Impulsive Systems On Time ScalesDocument30 pagesControllability and Observability For A Class of Time-Varying Impulsive Systems On Time ScalesZoubia DastgeerNo ratings yet
- Sheet 2Document1 pageSheet 2ahmedmohamedn92No ratings yet
- Yt X HT D: Lecture 9: Convolution Evaluation: Continuous Time SystemDocument5 pagesYt X HT D: Lecture 9: Convolution Evaluation: Continuous Time SystemRajat RameshNo ratings yet
- ELE 301: Signals and Systems: Prof. Paul CuffDocument28 pagesELE 301: Signals and Systems: Prof. Paul CuffcartamenesNo ratings yet
- Non-Linear Models For High Power AmplifiersDocument18 pagesNon-Linear Models For High Power AmplifiersTùng Quách HuyNo ratings yet
- Enae 641Document6 pagesEnae 641bob3173No ratings yet
- The Zero-State Response Sums of InputsDocument4 pagesThe Zero-State Response Sums of Inputsbaruaeee100% (1)
- Good Question DSPDocument36 pagesGood Question DSPMudit PharasiNo ratings yet
- Linearity, Causality and Time-Invariance of A SystemDocument11 pagesLinearity, Causality and Time-Invariance of A SystemYuvrajNo ratings yet
- Assignment 1Document7 pagesAssignment 1Umesh KumarNo ratings yet
- Part 2-Presentation 2Document18 pagesPart 2-Presentation 2Febri AudyansyahNo ratings yet
- DSP-Lec 2Document28 pagesDSP-Lec 2ngmaherNo ratings yet
- PO SS2011 05.1 DynamicOptimization p11Document11 pagesPO SS2011 05.1 DynamicOptimization p11Everton CollingNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- CH 2 P3 SignalDocument2 pagesCH 2 P3 SignalMukul RahmanNo ratings yet
- AC SysDocument7 pagesAC SysMukul RahmanNo ratings yet
- Chapter 4 FinalDocument18 pagesChapter 4 FinalMukul RahmanNo ratings yet
- Misplaced and Dangling Modifiers: A ReviewDocument24 pagesMisplaced and Dangling Modifiers: A ReviewMukul RahmanNo ratings yet
- 1.2 Course Outline Eng WritingDocument3 pages1.2 Course Outline Eng WritingMukul RahmanNo ratings yet
- English Writing Skills and CommunicationDocument10 pagesEnglish Writing Skills and CommunicationMukul RahmanNo ratings yet
- Chapter 12: Magnetic CircuitsDocument16 pagesChapter 12: Magnetic CircuitsMukul RahmanNo ratings yet
- Independent and Dependent SourcesDocument5 pagesIndependent and Dependent SourcesMukul RahmanNo ratings yet
- Lecture Week 2Document30 pagesLecture Week 2Mukul RahmanNo ratings yet
- Lecture Week 1Document23 pagesLecture Week 1Mukul RahmanNo ratings yet
- Ôn Tập Chia Thì Đủ LoạiDocument51 pagesÔn Tập Chia Thì Đủ LoạiNguyễn Minh NgọcNo ratings yet
- Soil & Water Assessment Tool: Theoretical DocumentationDocument647 pagesSoil & Water Assessment Tool: Theoretical Documentationceice2013No ratings yet
- BIO 361 Syllabus 2014Document3 pagesBIO 361 Syllabus 2014jyahn14No ratings yet
- Wijs-Cyclohexane MethodDocument4 pagesWijs-Cyclohexane Methodnuur iffahNo ratings yet
- Common Nonlinearities and Describing FunctionsDocument16 pagesCommon Nonlinearities and Describing FunctionsPrakhar Tainguriya SharmaNo ratings yet
- 2.13" SS100-G2-F: Motor Loads General Dimensional DataDocument1 page2.13" SS100-G2-F: Motor Loads General Dimensional DataTonyNo ratings yet
- Vehicle Specs - 1996 RAV4 StandardDocument2 pagesVehicle Specs - 1996 RAV4 StandardJacfNo ratings yet
- File Dryflex Cable Compounds Product GuideDocument15 pagesFile Dryflex Cable Compounds Product Guidetwo travellerNo ratings yet
- Actinomyces OdontolyticusDocument4 pagesActinomyces OdontolyticusLiviu Athos TamasNo ratings yet
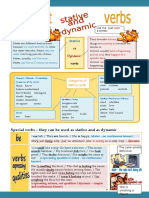
- Stative: Special Verbs - They Can Be Used As Stative and As DynamicDocument3 pagesStative: Special Verbs - They Can Be Used As Stative and As DynamicAnonymous Q21YDaSfNo ratings yet
- Atrius BrochureDocument23 pagesAtrius BrochureAdarsh SardharaNo ratings yet
- User Manual: Retail ScalesDocument14 pagesUser Manual: Retail ScalesFernando Chacmana LinaresNo ratings yet
- Gods and Power WordsDocument10 pagesGods and Power WordsKrasick100% (1)
- 018 - 3E - Paper Api 941 AcidenteDocument10 pages018 - 3E - Paper Api 941 AcidenteRicardo BarciaNo ratings yet
- ROHIT KUMAR ResumeDocument3 pagesROHIT KUMAR ResumeRohit KumarNo ratings yet
- 10-8 Geometric ProbabilityDocument7 pages10-8 Geometric ProbabilityNagendra Prasad100% (1)
- Day 1 - Latihan - Mengolah Data Di Excel Untuk Staf AdminDocument33 pagesDay 1 - Latihan - Mengolah Data Di Excel Untuk Staf AdminajengtrinormalitaNo ratings yet
- Concept For Colored StonesDocument2 pagesConcept For Colored Stonessaxon zvinaNo ratings yet
- Part II CH 3Document129 pagesPart II CH 3Davor VeseljkoNo ratings yet
- Permanently Installed SensorsDocument2 pagesPermanently Installed SensorsrodrurenNo ratings yet
- Lecture Notes For Week Ten Mechanics of Chain DrivesDocument11 pagesLecture Notes For Week Ten Mechanics of Chain DrivesJohn KimaniNo ratings yet
- ASUG QM Session 1 QM 101 Introduction To SAP Quality Management Module PDFDocument41 pagesASUG QM Session 1 QM 101 Introduction To SAP Quality Management Module PDFStorm100% (1)
- Effects of Junk Food and Beverages On AdDocument7 pagesEffects of Junk Food and Beverages On AdAnonymous OP6R1ZSNo ratings yet
- q1 General Physics Module 3Document20 pagesq1 General Physics Module 3Ciara Adrianne Tiongzon - ReyesNo ratings yet
- Unit I and IIDocument46 pagesUnit I and IIYg SonuNo ratings yet
- Ma 151 Lecture LT1Document95 pagesMa 151 Lecture LT1ryan_tan_17No ratings yet
- Deep Freezer 2023 C2C WebDocument4 pagesDeep Freezer 2023 C2C Webabhi.015pNo ratings yet
- A MODIFIED PENG-ROBINSON EQUATION OF STATE FOR - ELV - 20519 - FTP PDFDocument12 pagesA MODIFIED PENG-ROBINSON EQUATION OF STATE FOR - ELV - 20519 - FTP PDFLuiz Roberto TerronNo ratings yet